Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (5): 721-729.doi: 10.19562/j.chinasae.qcgc.2021.05.011
Previous Articles Next Articles
Longfei Zhong,Yuhui Peng( ),Ming Jiang
),Ming Jiang
Received:2020-10-14
Revised:2021-01-04
Online:2021-05-25
Published:2021-05-18
Contact:
Yuhui Peng
E-mail:pengyuhui@fzu.edu.cn
Longfei Zhong,Yuhui Peng,Ming Jiang. Stability Control of Distributed Driven Electric Vehicle Based on Phase Plane[J].Automotive Engineering, 2021, 43(5): 721-729.
"
"

"
| 路面附着系数μ | c | k |
|---|---|---|
| 0.3 | 0.09 | -1.69 |
| 0.4 | 0.11 | -2.02 |
| 0.5 | 0.14 | -2.37 |
| 0.6 | 0.16 | -2.86 |
| 0.7 | 0.19 | -2.89 |
| 0.8 | 0.21 | -3.04 |
| 0.9 | 0.24 | -3.35 |
| 1.0 | 0.28 | -3.78 |
"
"
"
"

"
"
"
| 参数名称 | 数值 | 参数名称 | 数值 |
|---|---|---|---|
| 整车质量 | 286 | 转动惯量 | 203 |
| 前后轴距 | 1.58 | 质心至前轴距离 | 0.805 |
| 轮距 | 1.20 | 质心至后轴距离 | 0.775 |
| 质心高度 | 0.30 | 前轮侧偏刚度 | -25 600 |
| 轮胎半径 | 0.23 | 后轮侧偏刚度 | -20 700 |
| 最高电压 | 403.2 | 电机峰值转矩 | 140 |
"
"

"
"
"
| 参数 | 相平面法 | γ控制 | 无控制 |
|---|---|---|---|
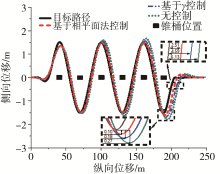
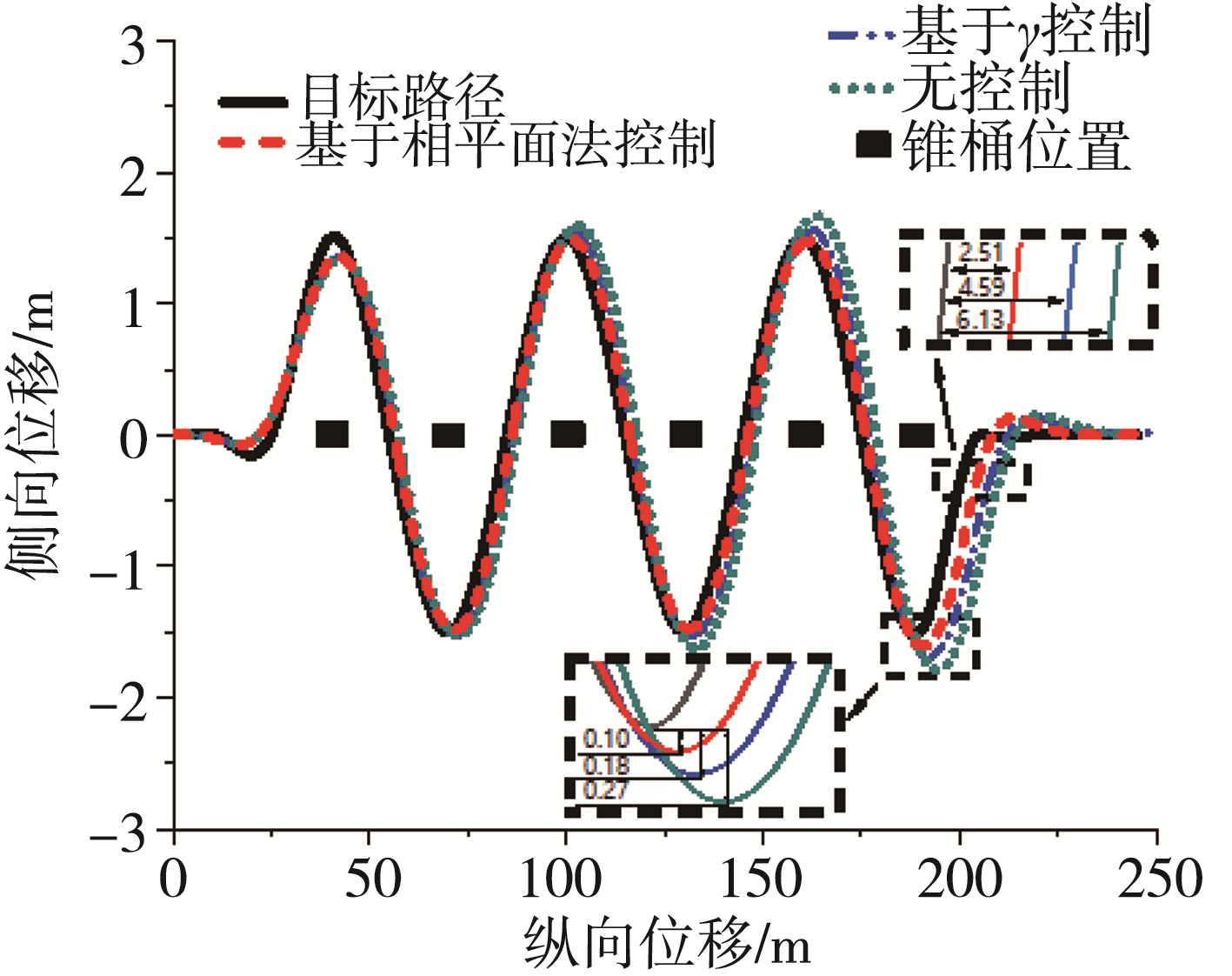
| 最大纵向位移/m | 2.51 | 4.59 | 6.13 |
| 最大侧向位移/m | 0.10 | 0.18 | 0.27 |
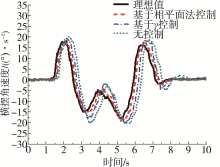
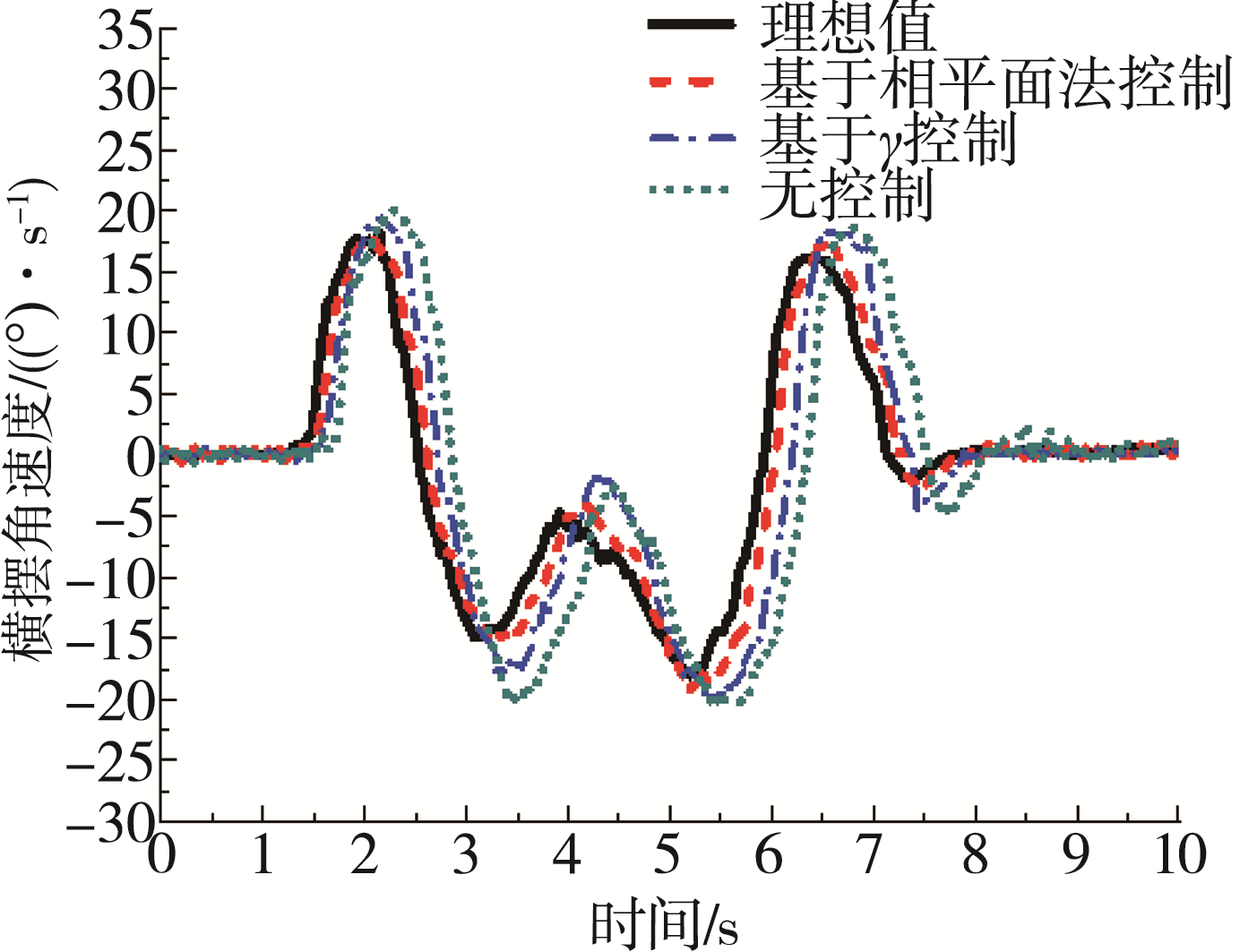
| 最大横摆角速度偏差/((°)·s-1) | 1.12 | 3.16 | 6.12 |
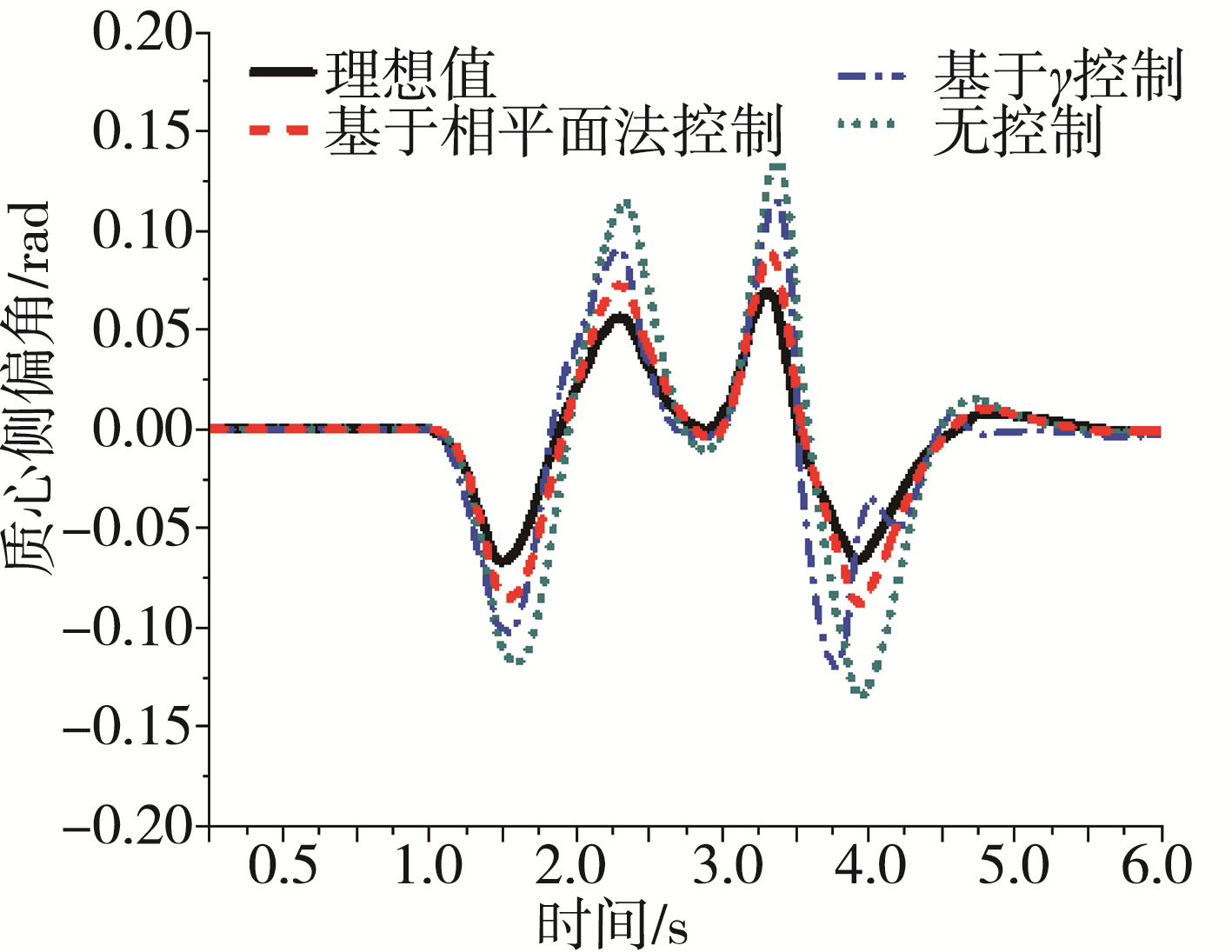
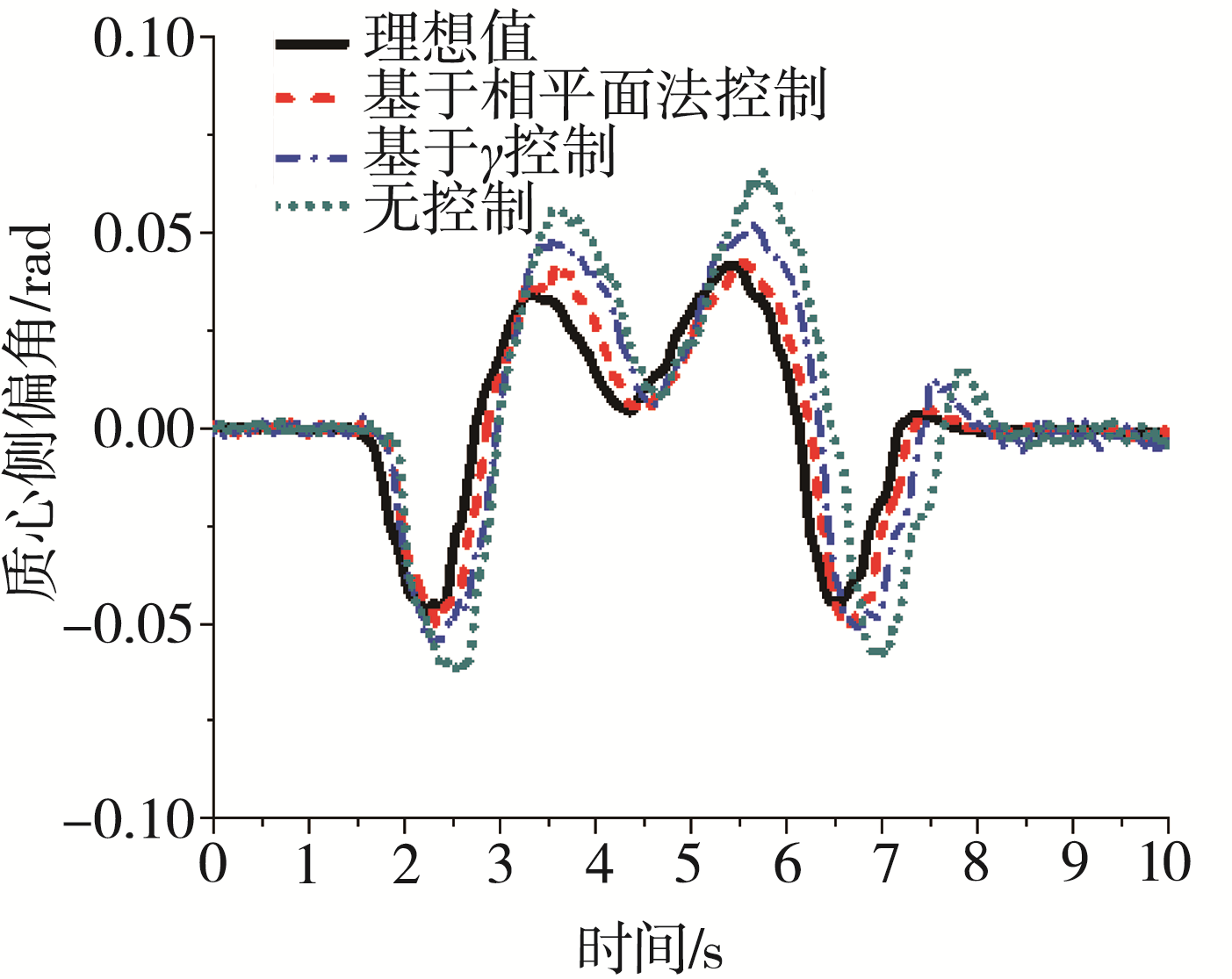
| 最大质心侧偏角/rad | 0.068 | 0.084 | 0.105 |
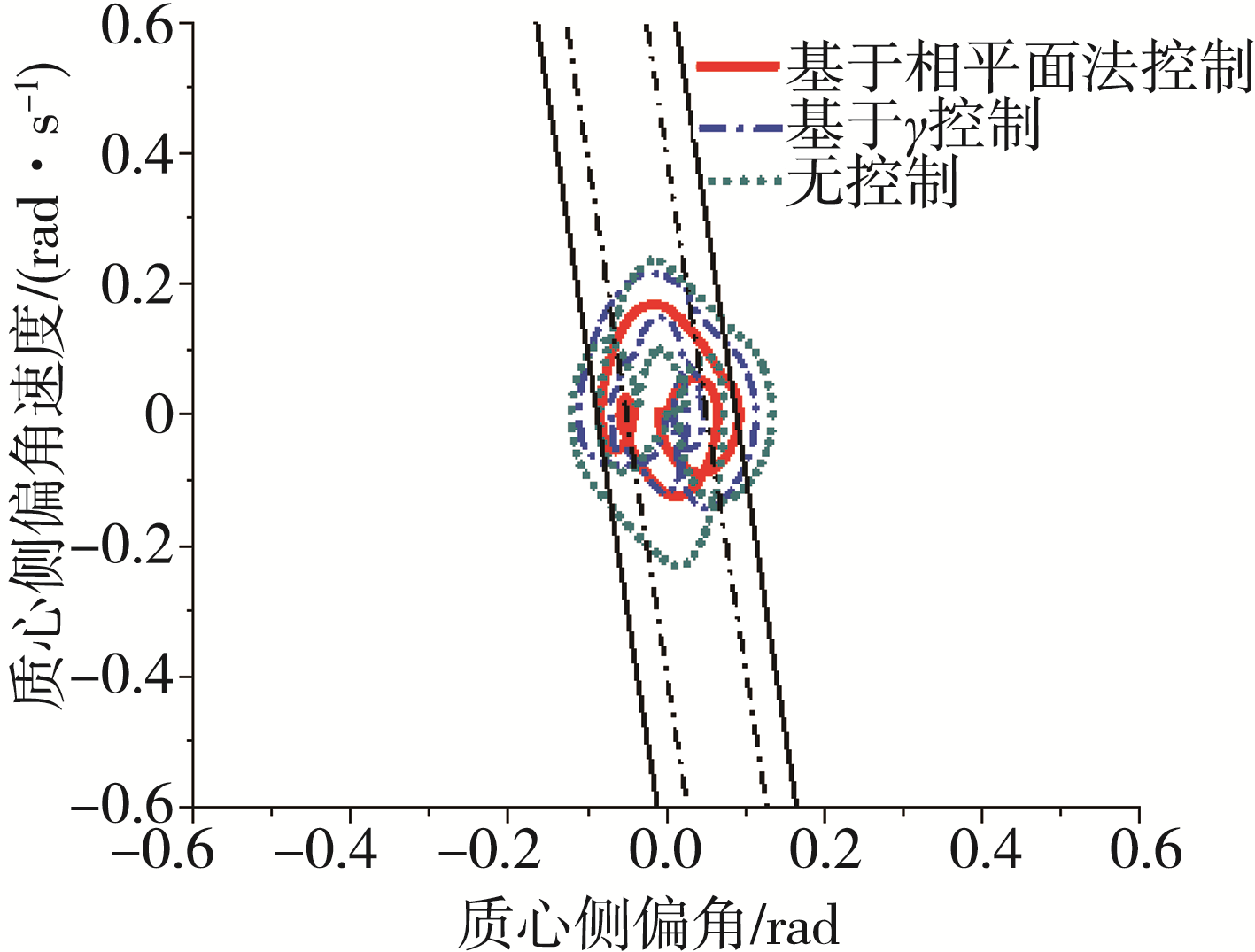
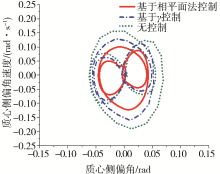
| 相平面失稳度/rad | 0 | 0.023 | 0.074 |

"

"
"
"
"
"
"
"
"
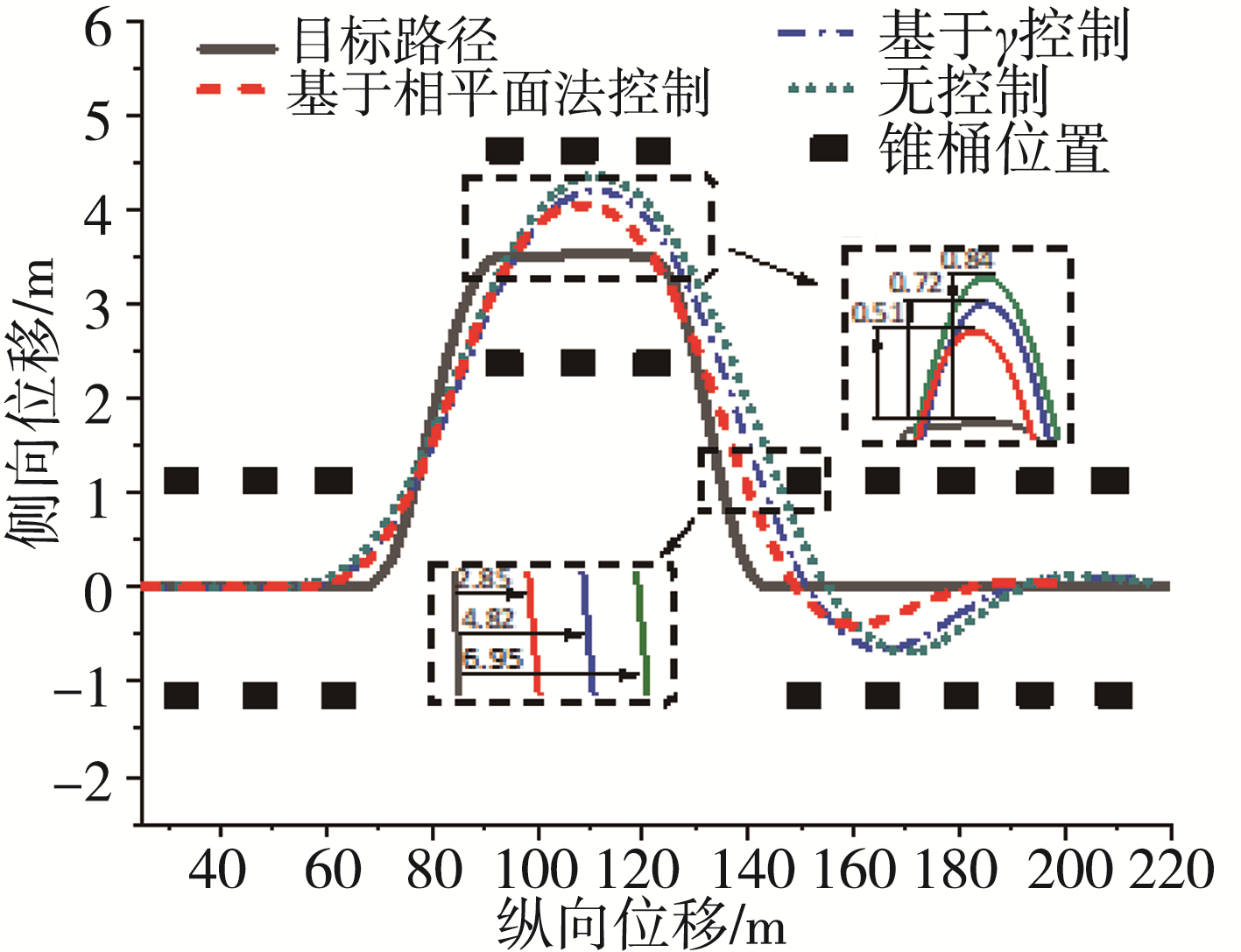
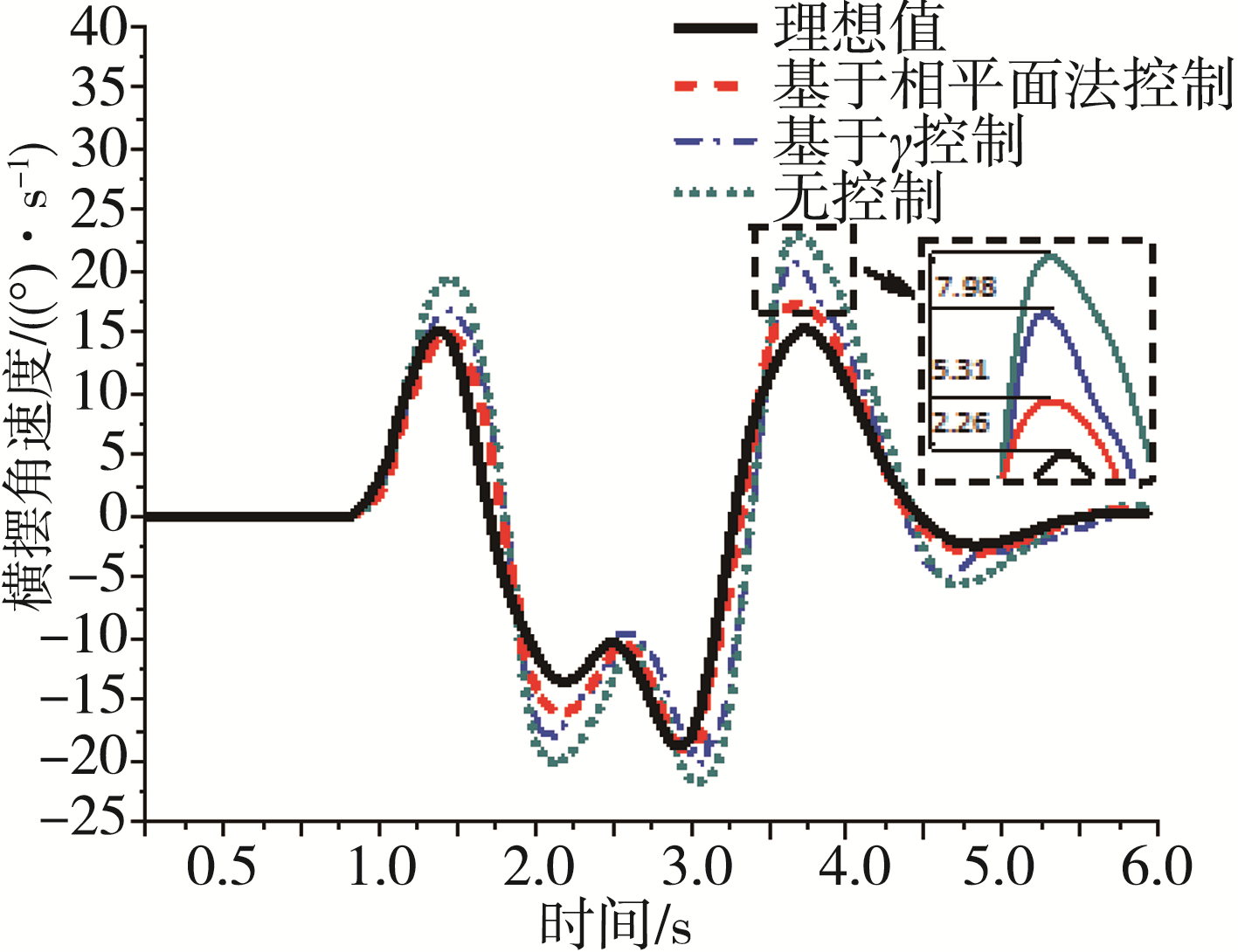
| 参数 | 相平面法 | γ控制 | 无控制 |
|---|---|---|---|
| 最大纵向位移/m | 2.85 | 4.82 | 6.95 |
| 最大侧向位移/m | 0.51 | 0.72 | 0.84 |
| 最大横摆角速度偏差/((°)·s-1) | 2.26 | 5.31 | 7.98 |
| 最大质心侧偏角/rad | 0.087 | 0.120 | 0.140 |
| 相平面失稳度 | 0.011 | 0.030 | 0.050 |
"
"
"

| 1 | VIGNATI M, SABBIONI E, TARSITANO D, et al. Electric powertrain layouts analysis for controlling vehicle lateral dynamics with torque vectoring [C]. Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, 2017. |
| 2 | BOBIER⁃TIU C, BEAL C, KEGELMAN J, et al. Vehicle control synthesis using phase portraits of planar dynamics [J]. Vehicle System Dynamics, 2019, 57(9): 1318-1337. |
| 3 | SACHS H K, SINGH M. Automobile stability⁃a study of the domain of attraction [J]. Vehicle System Dynamics, 2007, 6(2-3): 169-177. |
| 4 | INAGAKI S, KUSHIRO I, YAMAMOTO M. Analysis on vehicle stability in critical cornering using phase⁃plane method [J]. JSAE Review, 1995, 16(2): 287-292. |
| 5 | FARRONI F, RUSSO M, RUSSO R, et al. A combined use of phase plane and handling diagram method to study the influence of tyre and vehicle characteristics on stability [J]. Vehicle System Dynamics, 2013, 51(8): 1265-1285. |
| 6 | VIGNATI M, SABBIONI E, CHELI F. A torque vectoring control for enhancing vehicle performance in drifting [J]. Electronics, 2018, 7(12):394. |
| 7 | 柳江, 王政皓, 张业. 车辆主动转向和独立驱动集成控制[J]. 控制理论与应用, 2019, 36(8): 1351-1359. |
| LIU J, WANG Z H, ZHANG Y. Active steering and independent drive integrated control [J]. Control Theory & Applications, 2019, 36(8): 1351-1359. | |
| 8 | LIANG X T, CHEN W W, HU Y P, et al. Study on coordinated control strategy of electric vehicle AFS and DYC based on phase plane method [C]. INTER⁃NOISE and NOISE⁃CON Congress and Conference Proceedings, 2019. |
| 9 | 刘志强, 刘广. 分布式驱动电动汽车稳定性控制仿真与试验[J]. 汽车工程, 2019, 41(7):792-799. |
| LIU Z Q, LIU G. Simulation and test of stability control for distributed drive electric vehicles [J]. Automotive Engineering, 2019,41(7): 792-799. | |
| 10 | 刘学成, 刘俊, 李汉杰. 基于相平面法的车辆直接横摆力矩控制研究[J]. 合肥工业大学学报(自然科学版), 2019, 42(11): 1455-1461. |
| LIU X C, LIU J, LI H J. Research on direct yaw moment control of vehicle based on phase plane method [J]. Journal of Hefei University of Technology (Natural Science), 2019, 42(11): 1455-1461. | |
| 11 | VELENIS E, KATZOURAKIS D, FRAZZOLI E. Steady⁃state drif⁃ting stabilization of RWD vehicles [J]. Control Engineering Practice, 2011, 19(11): 1363-1376. |
| 12 | 王亚琴, 田杰, 蔡隆玉. 基于相平面的车辆稳定性DYC控制[J]. 制造业自动化, 2014, 36(12): 38-40. |
| WANG Y Q, TIAN J, CAI L Y. Direct yaw control of vehiclestability based on the phase plane theory [J]. Manufacturing Automation, 2014, 36(12): 38-40. | |
| 13 | ALAGAPPAN A V, RAO K V N, KUMAR R K. A comparison of various algorithms to extract magic formula tire model coefficients for vehicle dynamics simulations [J]. Vehicle System Dynamics, 2015, 53(2): 154-178. |
| 14 | 李绍松, 郭孔辉, 仇韬. 极限工况下主动前轮转向汽车稳定性控制[J]. 汽车工程, 2020, 42(2): 191-198. |
| LI S S, GUO K H, QIU T. Stability control of vehicle with active front steering under extreme conditions [J]. Automotive Engineering, 2020, 42(2): 191-198. | |
| 15 | 高月磊. 基于相平面稳定域边界的轻型车稳定性控制研究[D]. 长春: 吉林大学, 2013. |
| GAO Y L. Stability control study based on the stability boundary of phase plane for light vehicle [D]. Changchun: Jilin University, 2013. | |
| 16 | 阳贵兵, 廖自力, 刘春光. 基于β-β相平面法的电传动车辆稳定性控制方法[J]. 装甲兵工程学院学报, 2016, 30(3): 59-63. |
| YANG G B, LIAO Z L, LIU C G. Stability control method of electric drive vehicle based on β-β phase plane method [J]. Journal of Academy of Armored Force Engineering, 2016, 30(3): 59-63. | |
| 17 | 龚天洋, 谢宪毅. 基于相平面法的车辆电子稳定控制策略研究[J].交通信息与安全, 2019, 37(2): 83-90. |
| GONG T X, XIE X Y. A control strategy of vehicle electronic stability based on phase plane method [J]. Journal of Transport Information and Safety, 2019, 37(2): 83-90. | |
| 18 | 王立标, 李军, 范剑. 车辆横向稳定性自适应神经网络控制策略研究[J]. 汽车工程, 2010, 32(6): 493-496. |
| WANG L B, LI J, FAN J. A study on the control strategy of adaptive neural network for vehicle yaw stability [J]. Automotive Engineering, 2010, 32(6): 493-496. | |
| 19 | 汽车操纵稳定性试验方法: [S].2014. |
| Controllability and stability test procedure for automobile: [S]. 2014. |
| [1] | Nianzhong Zhang,Qiang Song,Guanfeng Wang,Mingsheng Wang. Research on Non-Current-Sensor Control of Permanent Magnet Synchronous Motor for Vehicle [J]. Automotive Engineering, 2024, 46(2): 281-289. |
| [2] | Zhipeng Jiao, Jian Ma, Xuan Zhao, Kai Zhang, Dean Meng, Qi Han, Zhao Zhang. Research on Short-Time Test Cycle and Method Based on Electric Vehicle Braking Safety Detection [J]. Automotive Engineering, 2024, 46(1): 109-119. |
| [3] | Jiangxin Yuan, Liping He, Yaodong Li, Gang Li. Thermal Analysis and Optimization Design of a BMS Slave Unit for Electric Vehicles [J]. Automotive Engineering, 2024, 46(1): 128-138. |
| [4] | Pengbo Zhang, Renxiang Chen, Yiming Shao, Shizheng Sun, Kaibo Yan. Research Review of Fault Diagnosis for Electric Drive Powertrain System of Pure Electric Vehicles [J]. Automotive Engineering, 2024, 46(1): 61-74. |
| [5] | Da Li,Junjun Deng,Zhaosheng Zhang,Peng Liu,Zhenpo Wang. Review on Power Battery Safety Warning Strategy in Electric Vehicles [J]. Automotive Engineering, 2023, 45(8): 1392-1407. |
| [6] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [7] | Haiqiang Liang,Hongwen He,Kangwei Dai,Bo Pang,Peng Wang. Research on Lithium Ion Battery Life Prediction Method Based on Empirical Aging Model and Mechanism Model for Electric Vehicles [J]. Automotive Engineering, 2023, 45(5): 825-835. |
| [8] | Yapeng Li,Xiaolin Tang,Xiaosong Hu. Study on Eco-driving of PHEVS Based on Hierarchical Control Strategy [J]. Automotive Engineering, 2023, 45(4): 551-560. |
| [9] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [10] | Zhongqiang Wu,Changxing Zhang. Distributed Charging Control of Electric Vehicles Considering Distribution Grid Load [J]. Automotive Engineering, 2023, 45(4): 598-608. |
| [11] | Zhiheng Wu,Aimin Liu. Switching Functional Hybrid Control Strategy for Permanent Magnet Synchronous Motor of Electric Vehicle [J]. Automotive Engineering, 2023, 45(4): 619-627. |
| [12] | Yuhang Kang,Shaohua Li,Zekun Yang. Study on Stability Control Strategy of Heavy Vehicles Based on Phase Space Three-Dimensional Dynamic Stability Domain [J]. Automotive Engineering, 2023, 45(4): 637-646. |
| [13] | Junnian Wang,Shoulin Gao,Fang Yang,Changyang Guan,Zhihua Yang. Optimization of Vibration Characteristic of an Electric Torque-Vectoring Drive-Axle with Multiple Planetary Gearsets [J]. Automotive Engineering, 2023, 45(3): 421-429. |
| [14] | Cheng Zhu,Di Liu,Xinyu Teng,Guohua Zhang,Dan Yu,Sha Liu,Ningdan Hu. Comparative Analysis and Forecast Research on Comprehensive Economy of New Energy Vehicles [J]. Automotive Engineering, 2023, 45(2): 333-340. |
| [15] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |