Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (4): 645-657.doi: 10.19562/j.chinasae.qcgc.2025.04.006
Congshuai Guo,Hui Liu,Shida Nie( ),Yingjie Song,Yujia Xie,Fawang Zhang
),Yingjie Song,Yujia Xie,Fawang Zhang
Received:2024-06-02
Revised:2024-09-14
Online:2025-04-25
Published:2025-04-18
Contact:
Shida Nie
E-mail:nieshida@bit.edu.cn
Congshuai Guo,Hui Liu,Shida Nie,Yingjie Song,Yujia Xie,Fawang Zhang. Trajectory Planning for Autonomous Vehicles Considering Complex Terrains and Obstacle Scales[J].Automotive Engineering, 2025, 47(4): 645-657.
"


"
"
"
"

"
"


"
"

"
"

"
"
"
工况 名称 | 工况特点 | 试验目的 | ||
|---|---|---|---|---|
| 工况1 | 包含起伏路面 | 验证TOTP对复杂地形的处理能力 | 算法 有效性 | 泛化能力 |
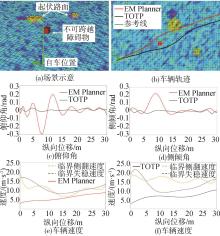
| 工况2 | 包含起伏路面和不可跨越障碍 | 验证TOTP对复杂地形和不可跨越障碍物的处理能力 | ||
| 工况3 | 包含可跨越障碍和不可跨越障碍 | 验证非结构化道路同时存在可跨越和不可跨越障碍时TOTP的处理能力 | 决策 合理性 | |
| 工况4 | 包含可跨越障碍和起伏路面 | 验证同时存在起伏道路和可跨越障碍条件下TOTP的处理能力 | ||
"
"
| 参数 | 数值 |
|---|---|
| 车辆长度 Lv/m | 4.610 |
| 车辆宽度 W/m | 1.826 |
| 车辆高度 H/m | 1.763 |
| 车辆质量 m/kg | 2 285 |
| 轴距 L/m | 2.69 |
| 轮距 B/m | 1.581 |
| 质心高度 hg/m | 0.67 |
| 最小离地间隙 h/m | 0.283 |
| 两侧轮胎内缘距离 b/m | 1.36 |
| 车辆前轴刚度 | 39 600 |
| 车辆后轴刚度 | 39 600 |

"


"

"
| 项目 | MAP/rad | MAR/rad | MV/( |
|---|---|---|---|
| EM Planner | 0.074 | 0.096 | 3.71 |
| TOTP | 0.022 | 0.026 | 5.21 |
| 对比 | -70.3% | -72.9% | 40.4% |
"
"
| 项目 | MAP/rad | MAR/rad | MV/( |
|---|---|---|---|
| EM Planner | 0.047 | 0.072 | 5.62 |
| TOTP | 0.015 | 0.019 | 6.51 |
| 对比 | -68.1% | -73.6% | 15.8% |
"

"
| 项目 | MAP/rad | MAR/rad | MV /( | MALA /( |
|---|---|---|---|---|
| 避障 | 0.006 | 0.009 | 5.58 | 1.65 |
| 跨障 | 0.007 | 0.009 | 7.23 | 0.47 |
| 对比 | 16.6% | 0 | 29.6% | -71.5% |
"
| 项目 | J | |||
|---|---|---|---|---|
| 避障 | 385.44 | 145.87 | 120.40 | 651.71 |
| 跨障 | 245.49 | 34.92 | 122.78 | 403.19 |
"

"
| 项目 | MAP/rad | MAR/rad | MV/( | MALA/( |
|---|---|---|---|---|
| 避障 | 0.015 | 0.012 | 6.19 | 1.53 |
| 跨障 | 0.041 | 0.039 | 5.79 | 0.45 |
| 对比 | 173.3% | 225.0% | -6.4% | -70.6% |
"
| 项目 | J | |||
|---|---|---|---|---|
| 避障 | 355.46 | 137.87 | 128.72 | 622.05 |
| 跨障 | 407.34 | 29.92 | 307.44 | 744.7 |
"
跨障规划 平均耗时 | 避障规划 平均耗时 | 速度规划 平均耗时 | 总耗时 |
|---|---|---|---|
| 20.3 | 21.57 | 18.3 | 60.37 |
| 1 | HU J, HU Y, LU C, et al. Integrated path planning for unmanned differential steering vehicles in off-road environment with 3D terrains and obstacles [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5562-5572. |
| 2 | FAN H, ZHU F, LIU C, et al. Baidu apollo EM motion planner [J]. ArXiv, 2018, abs/1807.08048. |
| 3 | SHI Y, HUANG Y, CHEN Y. Trajectory planning of autonomous trucks for collision avoidance with rollover prevention [J]. IEEE Transactions on Intelligent Transportation Systems, 2021: 1-10. |
| 4 | WERLING M, ZIEGLER J, KAMMEL S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenét Frame[C]. Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2010: 987-993. |
| 5 | YANG L, QI J, SONG D, et al. Survey of robot 3D path planning algorithms [J]. Journal of Control Science and Engineering, 2016, 2016: 1-22. |
| 6 | CLAUSSMANN L, REVILLOUD M, GRUYER D, et al. A review of motion planning for highway autonomous driving [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 1826-1848. |
| 7 | PADEN B, ČáP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles [J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. |
| 8 | 吴晓建, 廖平伟, 雷耀, 等. 面向结构化道路的智能驾驶轨迹规划一致性研究 [J]. 汽车工程, 2024, 46(3): 383-395,430. |
| WU X J, LIAO P W, LEI Y, et al. Research on consistency of intelligent driving trajectory planning for structured road [J]. Automotive Engineering, 2024, 46(3): 383-395,430. | |
| 9 | HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths [J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 10 | SHANG E, DAI B, NIE Y, et al. A guide-line and key-point based A-star path planning algorithm for autonomous land vehicles [C]. Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020. |
| 11 | ERKE S, BIN D, YIMING N, et al. An improved A-Star based path planning algorithm for autonomous land vehicles [J]. International Journal of Advanced Robotic Systems, 2020, 17(5). |
| 12 | JIANG J, HAN Z, LI J, et al. Global path planning of UGVs in large-scale off-road environment based on improved A-star algorithm and quadratic programming [C]. Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2023. |
| 13 | RASTGOFTAR H, ZHANG B, ATKINS E M. A data-driven approach for autonomous motion planning and control in off-road driving scenarios [Z]. Ithaca; Cornell University Library, arXiv.org. 2018. |
| 14 | TIAN F, ZHOU R, LI Z, et al. Trajectory planning for autonomous mining trucks considering terrain constraints [J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(4): 772-786. |
| 15 | CAI X, EVERETT M, FINK J, et al. Risk-aware off-road navigation via a learned speed distribution map [C]. Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022: 2931-3937. |
| 16 | 田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划 [J]. 汽车工程, 2021, 43(4): 518-526. |
| TIAN H Q, DING F, ZHENG X J, et al. Motion planning based on virtual force of potential field for intelligent connected vehicles [J]. Automotive Engineering, 2021, 43(4): 518-526. | |
| 17 | CHI W, WANG C, WANG J, et al. Risk-DTRRT-based optimal motion planning algorithm for mobile robots [J]. IEEE Transactions on Automation Science and Engineering, 2019, 16(3): 1271-1288. |
| 18 | 田洪清, 王建强, 黄荷叶,等. 越野环境下基于势能场模型的智能车概率图路径规划方法 [J]. 兵工学报, 2021, 42(7): 1496-1505. |
| TIAN H Q, WANG J Q, HUANG H Y, et al. Probabilistic roadmap method for path planning of intelligent vehicle based on artificial potential field model in off-road environment [J]. Acta Armamentarii, 2021, 42(7): 1496-1505. | |
| 19 | TANG C, ZHAO Y. Hierarchical path planning based on PPO for UVs on 3D off-road terrain [C]. Proceedings of the 2022 IEEE 4th International Conference on Power, Intelligent Computing and Systems (ICPICS). IEEE, 2022: 295-300. |
| 20 | YANG L, WANG Q, TAN Y, et al. Autonomous vehicle path planning considering dwarf or negative obstacles [C]. Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019: 1021-1026. |
| 21 | LUO H, LI M, LIANG G, et al. An obstacle-crossing strategy based on the fast self-reconfiguration for modular sphere robots[C]. Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020: 3296-3303. |
| 22 | CHEN M, CAO Y, TIAN Y, et al. A passive compliance obstacle-crossing robot for power line inspection and maintenance [J]. IEEE Robotics and Automation Letters, 2023, 8(5): 2772-2779. |
| 23 | BERTI M, CORSINI A, DAEHNE A. Comparative analysis of surface roughness algorithms for the identification of active landslides [J]. Geomorphology, 2013, 182: 1-18. |
| 24 | 余志生. 汽车理论 [M]. 6版. 北京:机械工业出版社, 2018. |
| YU Z S. Automotive theory [M]. 6th ed. Beijing: China Machine Press, 2018. | |
| 25 | RAJAMANI R. Vehicle dynamics and control [M]. Springer Science & Business Media, 2011. |
| [1] | Ziniu Hu,Xinpeng Chen,Zeyu Yang,Ziyun Yu,Hongmao Qin,Ming Gao. Path Planning with Multiple Obstacle-Avoidance Modes for Intelligent Vehicles [J]. Automotive Engineering, 2025, 47(3): 402-411. |
| [2] | Junjun Zhu,Jintao Pang,Huapeng Zhou. Research on Polynomial Pose Trajectory Planning for Corner Module Vehicles in Highway Lane-Changing Scenarios [J]. Automotive Engineering, 2025, 47(2): 236-247. |
| [3] | Ying Zhao,Jibo Hao,Keming Zhou,Jianfeng Hu,Yicheng Wang,Yueqiang Wang. Mechanical Properties of Double-arrow Non-pneumatic Tires Under the Condition of Unstructured Road [J]. Automotive Engineering, 2025, 47(1): 149-160. |
| [4] | Shuo Zhang,Shiqi Kuang,Xuan Zhao,Yisong Chen,Qiang Yu,Man Yu. Research on Global Oriented Path Planning Fusion Algorithm for Intelligent Vehicles [J]. Automotive Engineering, 2024, 46(9): 1546-1555. |
| [5] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [6] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [7] | Junyu Zhou,Keqiang Li,Hanxiao Ren,Jie Yu,Yugong Luo. A Cooperative Obstacle Avoidance Lane Change Strategy for Intelligent and Connected Vehicles Based on Scene Division [J]. Automotive Engineering, 2024, 46(5): 745-753. |
| [8] | Yongtao Liu,Feiran Sun,Shiquan Yuan,Longxin Gao,Ying Cao,Yisong Chen,Jie Qiao. Research on the Intelligent Connected Vehicle Lane Changing Strategies in Mixed Traffic Environment of Expressway [J]. Automotive Engineering, 2024, 46(5): 754-765. |
| [9] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [10] | Xiaojian Wu,Pingwei Liao,Yao Lei,Huihua Jiang,Aichun Wang,Jiaqi Hu. Research on Consistency of Intelligent Driving Trajectory Planning for Structured Road [J]. Automotive Engineering, 2024, 46(3): 383-395. |
| [11] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [12] | Xiaohu Geng,Yao Fu,Jie Wang,Yulong Lei,Weidong Liu,Yuhai Wang,Ke Liu. Predictive Cruise Control for Commercial Vehicles Considering Different Time Domains [J]. Automotive Engineering, 2024, 46(11): 2046-2058. |
| [13] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [14] | Lijun Qian,Chen Chen,Jian Chen. Centralized Trajectory Planning in an Unsignalized Intersection Environment Considering Driver Error [J]. Automotive Engineering, 2023, 45(5): 768-776. |
| [15] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
|
||