Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (6): 1188-1197.doi: 10.19562/j.chinasae.qcgc.2025.06.017
Aiqi Long1,Zhiguo Feng1,2( ),Zhenbo Zhang1,Xingqiang Tian3,Wei Xiang3,4
),Zhenbo Zhang1,Xingqiang Tian3,Wei Xiang3,4
Received:2024-12-03
Revised:2025-01-07
Online:2025-06-25
Published:2025-06-20
Contact:
Zhiguo Feng
E-mail:zgfeng@gzu.edu.cn
Aiqi Long,Zhiguo Feng,Zhenbo Zhang,Xingqiang Tian,Wei Xiang. Vehicle Target Detection Algorithm Based on Lightweight RT-DETR-tiny[J].Automotive Engineering, 2025, 47(6): 1188-1197.

"

"
"

"

"

"
"
"
"
| 参数 | 设置 | 参数 | 设置 |
|---|---|---|---|
| Epochs | 160 | Lr0 | 0.000 1 |
| Batch | 16 | Momentum | 0.9 |
| Workers | 8 | Weight_decay | 0.000 1 |
| Images | 640 | Optimizer | AdamW |
"
| 编号 | 原骨干网络 | ReduFast 骨干网络 | 原编码器 | DGSTM模块 | EAAIFI 模块 | 原损失函数 | 新损失函数 | AP0.5/% | 参数量/106 | 计算量/ Gflops | FPS/ (帧·s-1) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RT-DETR | √ | √ | √ | 75.4 | 19.88 | 57.0 | 42.8 | |||||
| 实验1 | √ | √ | √ | 75.2 | 13.84 | 44.4 | 44.3 | |||||
| 实验2 | √ | √ | √ | 74.6 | 12.50 | 37.7 | 43.5 | |||||
| 实验3 | √ | √ | √ | √ | 74.4 | 12.51 | 37.9 | 45.1 | ||||
| 实验4 | √ | √ | √ | 75.3 | 12.51 | 37.9 | 45.1 | |||||
"

"
| 骨干网络 | AP0.5/% | AP0.5:0.95/% | 参数量/ 106 | 计算量/Gflops | FPS/ (帧·s-1) |
|---|---|---|---|---|---|
| ResNet-18 | 75.4 | 42.4 | 19.88 | 57.0 | 42.8 |
| FastNet | 73.0 | 40.6 | 10.81 | 28.5 | 36.6 |
| EfficientVit | 70.7 | 39.2 | 10.70 | 27.2 | 21.1 |
| MobileNetv4 | 72.4 | 40.0 | 11.31 | 39.5 | 34.7 |
| PKINet | 73.1 | 41.1 | 12.72 | 42.9 | 7.97 |
| GhostNet | 70.2 | 38.7 | 12.58 | 27.0 | 39.2 |
| ReduFastNet | 75.2 | 42.4 | 13.84 | 44.4 | 44.3 |
"
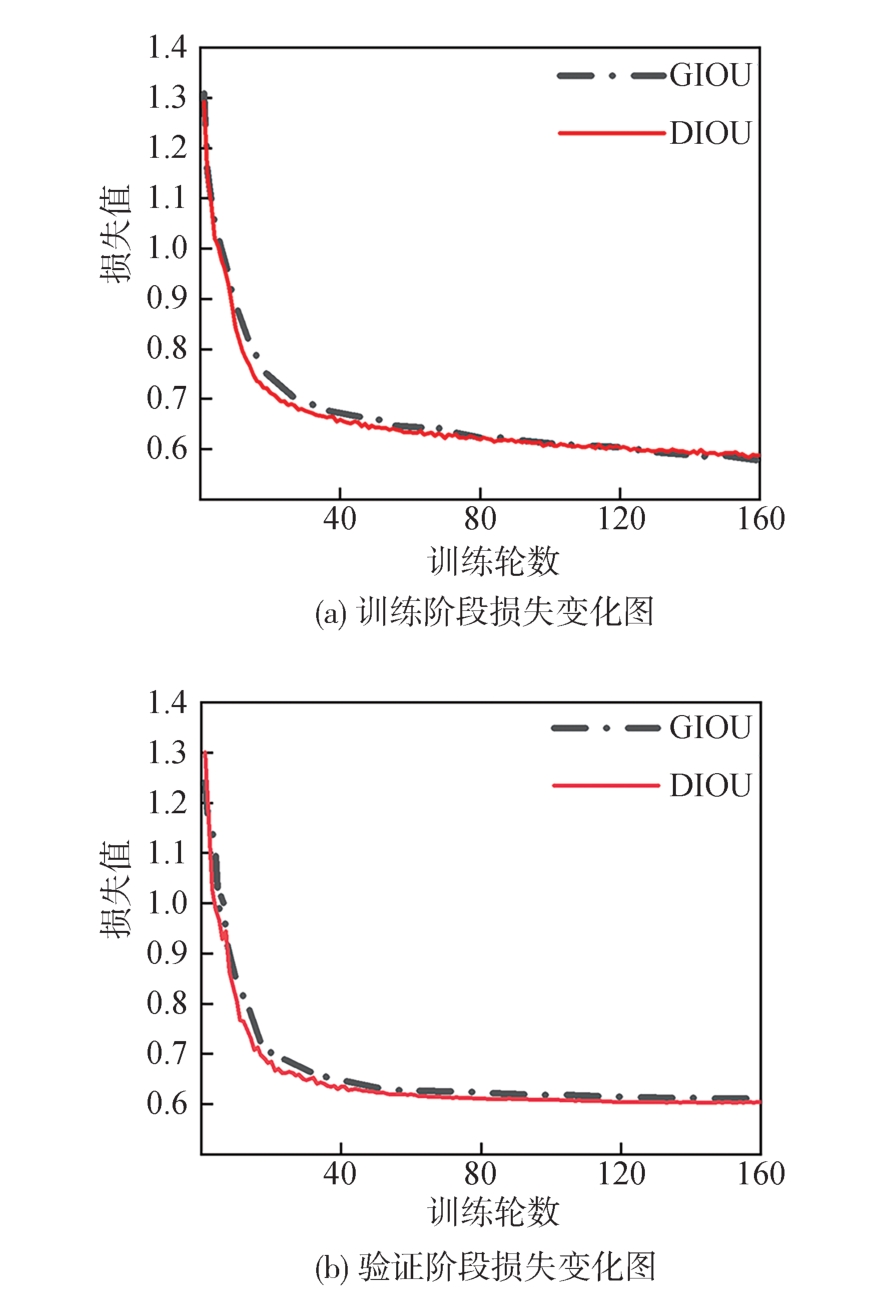
| IOU | CIOU | DIOU | EIOU | GIOU (baseline) | SIOU |
|---|---|---|---|---|---|
| AP0.5 | 74.5 | 75.3 | 74.7 | 74.4 | 75 |

"
"
| Model | AP0.5/% | AP0.5:0.95/ % | 参数量/106 | 计算量/ Gflops | FPS/ (帧·s-1) |
|---|---|---|---|---|---|
| RetinaNet | 67.9 | 37.8 | 47.57 | 128 | 31.1 |
| Faster-RCNN | 70.7 | 38.8 | 50.98 | 137.2 | 33 |
| YOLOV5S | 70.2 | 40.1 | 9.11 | 23.8 | 71.2 |
| YOLOV8S | 71.5 | 40.8 | 11.13 | 28.8 | 76.8 |
| YOLOV8M | 73.2 | 42.4 | 25.84 | 78.7 | 60 |
| YOLOV9S | 71.1 | 40.8 | 7.17 | 26.7 | 27.3 |
| YOLOV9M | 72.8 | 41.4 | 20.01 | 76.5 | 37.4 |
| RT-DETR-R18 | 75.4 | 42.4 | 19.88 | 57 | 42.8 |
| RT-DETR-tiny | 75.3 | 41.8 | 12.50 | 37.9 | 45.1 |

"
"
| 1 | 詹海浪. 基于计算机视觉的车道线检测与交通路标识别[D]. 广州:华南理工大学, 2015. |
| ZHAN H L.The lane line detection and traffic sign recognition baseon computer vision[D].Guangzhou:South China University of Technology,2015. | |
| 2 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]. Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas,USA, 2016:779-788. |
| 3 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016,39(6):1137-1149. |
| 4 | 张炳力, 秦浩然, 江尚, 等. 基于RetinaNet及优化损失函数的夜间车辆检测方法 [J].汽车工程, 2021,43(8):1195-1202. |
| ZHANG B L,QIN H R,JIANG S,et al.A method of vehicle detection at night based on RetinaNet and optimized loss functions[J].Automotive Engineering,2021,43(8):1195-1202. | |
| 5 | 沈瑜, 李阳阳, 李博昊, 等. 基于感知增强与多尺度融合的小目标车辆检测 [J].北京航空航天大学学报, 2024:1-12. |
| SHEN Y,LI Y Y,LI B H,et al.Small target vehicle detection based on perceptual enhancement and multi scale fusion[J].Journal of Beijing University of Aeronautics and Astronautics,2024:1-12. | |
| 6 | ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression[C]. Proceedings of the AAAI Conference on Artificial Intelligence, New York, USA, 2020, 34:12993-13000. |
| 7 | ZHAO Y, LV W, XU S, et al. Detrs beat YOLOS on real-time object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2024:16965-16974. |
| 8 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016:770-778. |
| 9 | HAN K, WANG Y, TIAN Q, et al. GhostNet: more features from cheap operations[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020:1580-1589. |
| 10 | DING X, ZHANG X, MA N, et al. RepVGG: making VGG-style ConvNets great again[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021:13733-13742. |
| 11 | SHAKER A, MAAZ M, RASHEED H, et al. SwiftFormer: efficient additive attention for transformer-based real-time mobile vision applications[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2023:17425-17436. |
| 12 | GONG W. Lightweight object detection: a study based on YOLOv7 integrated with ShuffleNetv2 and vision transformer [J].arXiv preprint arXiv:, 2024. |
| 13 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks [J].Communications of the ACM, 2017,60(6):84-90. |
| 14 | REZATOFIGHI H, TSOI N, GWAK J Y, et al. Generalized intersection over union: a metric and a loss for bounding box regression[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019:658-666. |
| 15 | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation [J].IEEE Transactions on Cybernetics, 2022,52(8):8574-8586. |
| 16 | YU F, CHEN H, WANG X, et al. BDD100K: a diverse driving dataset for heterogeneous multitask learning[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020:2636-2645. |
| 17 | SELVARAJU R R, COGSWELL M, DAS A, et al. Grad-CAM: visual explanations from deep networks via gradient-based localization [J].International Journal of Computer Vision, 2020,128:336-359. |
| 18 | CHEN J, KAO S H, HE H, et al. Run, don't walk: chasing higher FLOPS for faster neural networks[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023:12021-12031. |
| 19 | LIU X, PENG H, ZHENG N, et al. EfficientViT: memory efficient vision transformer with cascaded group attention[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Vancouver, Canada, 2023:14420-14430. |
| 20 | QIN D, LEICHNER C, DELAKIS M, et al. MobileNetV4: universal models for the mobile ecosystem[C]. Proceedings of the Computer Vision-ECCV 2024, Springer, Cham 2024:78-96. |
| 21 | CAI X, LAI Q, WANG Y, et al. Poly kernel inception network for remote sensing detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2024:27706-27716. |
| 22 | ZHANG Y F, REN W, ZHANG Z, et al. Focal and efficient IOU loss for accurate bounding box regression [J].Neurocomputing, 2022,506:146-157. |
| 23 | GEVORGYAN Z. SIoU loss: more powerful learning for bounding box regression [J].arXiv preprint arXiv:, 2022. |
| 24 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [J].IEEE Transactions on Pattern Analysis & Machine Intelligence, 2020,42(2):318-327. |
| 25 | WANG C Y, YEH I H, LIAO H Y M. YOLOv9: learning what you want to learn using programmable gradient information[C]. Proceedings of the Computer Vision-ECCV 2024, Springer, Cham, 2024:1-12. |
| [1] | Chunlong Ma,Wenjun Xia,Shengguo Li,Yanyu Guo,Qingyuan Su. Research on Vehicle Frame Lightweight Based on the IHHO Algorithm [J]. Automotive Engineering, 2025, 47(5): 992-1006. |
| [2] | Lingyu Sun,Chunjie Guo,Guohong Shi,Junlei Wei,Zhaojiang Zhang,Deqiang Wang,Xinting Ren. Review on Key Technologies for Integrated Manufacture of Automotive Composite Materials by Injection Overmolding After Compression [J]. Automotive Engineering, 2025, 47(4): 692-700. |
| [3] | Bo Liu,Kangle Wang,Jian Yang,Yunbo Zeng,Jinsheng Zhang,Shuxun Jiang. Research and Application of Process Integration Design Method for Body-in-White Shock Tower [J]. Automotive Engineering, 2025, 47(1): 161-167. |
| [4] | Rong Cao,Junwei Hua,Yongcheng Li,Fangli Guo,Wenbin Hou. Intelligent Design and Analysis of Body Structure Based on Data Drive [J]. Automotive Engineering, 2024, 46(7): 1273-1281. |
| [5] | Zhiling Fang,Yanli Song,Jie Kang,Xinghong Zhang,Dan Zhang. Lightweight Design and Optimization of Integrated Die Casting Aluminum Alloy Front Cabin [J]. Automotive Engineering, 2024, 46(7): 1314-1322. |
| [6] | Chao Wang,Ming Li,Aiguo Cheng,Zhicheng He,Wanyuan Yu. Lightweight Design of Material-Structure for Steel-Aluminum Hybrid Cab [J]. Automotive Engineering, 2024, 46(4): 735-744. |
| [7] | Cong Gao,Yingdan Zhu,Bofang Liu,Tiehu Li,Zhibai Wang,Gang Feng. Interfacial Optimization and Rapid Prototyping Process of Thermoplastic Carbon Fiber/Nylon 6 Composites for Automotive Lightweight [J]. Automotive Engineering, 2024, 46(3): 546-556. |
| [8] | Libin Duan,Yu Zhang,Zhanpeng Du,Yegang Liu,Xiangxin Meng,Guannan Tian,Haiyang Zheng,Chuang Wu. Research on Lightweight Design of CTB Battery Pack Cover Assembly Based on VRB/OW-GFRP Hybrid Structure [J]. Automotive Engineering, 2024, 46(2): 290-299. |
| [9] | Zihao Meng,Dengfeng Wang,Xiaopeng Zhang,Zifeng Zhang,Fengmin Lian,Jing Chen. Integrated Optimization Design of Lightweight and Fatigue Life for the Integrated Structure of Cell-To-Frame [J]. Automotive Engineering, 2024, 46(12): 2143-2153. |
| [10] | Bo Liu,Yongxin Tang,Yi Wu,Ziyang Wang,Qin Yang,Tiegang Hu,Xiaomin Xu. Study on Lightweight Design of Integrated Mega-casting Aluminum Alloy Vehicle Body Components [J]. Automotive Engineering, 2024, 46(12): 2154-2163. |
| [11] | Xiaoyan Li,Haiyan Yu,Zunkang Chu. Lightweight Bus Frame Based on Static Strength and Rollover Safety [J]. Automotive Engineering, 2024, 46(12): 2200-2208. |
| [12] | Zhongyu Li,Zitong He,Jianfeng Wang,Bing Wang,Yiqun Liu,Junyuan Zhang. Impact Damage Assessment of CFRP Battery Box Based on Lamb Waves [J]. Automotive Engineering, 2024, 46(12): 2232-2240. |
| [13] | Qin Zhu,Shenyang Han,Mingru Zeng,Pinghong Lai,Chuimao Wu,Weiyi Hu. SFW-YOLOv8 Complex Scene Video Vehicle Detection Model [J]. Automotive Engineering, 2024, 46(12): 2290-2302. |
| [14] | Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability [J]. Automotive Engineering, 2024, 46(10): 1829-1841. |
| [15] | Xianguang Gu, Honglin Chen, Luxin Yu, Daisheng Zhang. Integrated Design of Precision Aluminum Castings Parts and Its Application in Lightweight Vehicle Body [J]. Automotive Engineering, 2024, 46(1): 179-186. |
|
||