Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (5): 735-745.doi: 10.19562/j.chinasae.qcgc.2023.05.003
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Zixian Li,Shiju Pan,Yuan Zhu( ),Binbing He,Youchun Xu
),Binbing He,Youchun Xu
Received:2022-10-27
Revised:2022-12-20
Online:2023-05-25
Published:2023-05-26
Contact:
Yuan Zhu
E-mail:prizhyle0223@sina.com
Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward[J].Automotive Engineering, 2023, 45(5): 735-745.
"
"
"
"
"
| 变量 | 论域 |
|---|---|
"
| 参数 | 数值 |
|---|---|
| 总质量/kg | 4 000 |
| 簧下总质量/kg | 400 |
| 质心至第1轴距离/m | 1.65 |
| 质心至第2轴距离/m | 0.55 |
| 质心至第3轴距离/m | 0.55 |
| 质心至第4轴距离/m | 1.65 |
| 各悬架阻尼/(N·s·m-1) | 1 200 |
| 各悬架刚度/(N·m) | 13 000 |
| 各轮胎刚度/(N·m) | 210 000 |
| 绕x轴转动惯量/(kg·m2) | 1 782 |
| 绕y轴转动惯量/(kg·m2) | 5 953 |
| 绕z轴转动惯量/(kg·m2) | 5 953 |
"
"

"
| 性能指标 | 方法一 | 方法二 | 方法三 |
|---|---|---|---|
| 垂向加速度 | 0.810 5 | 0.942 9 | 1.059 7 |
| 俯仰角加速度 | 0.015 9 | 0.017 3 | 0.018 4 |
| 侧倾角加速度 | 0.007 5 | 0.008 7 | 0.009 3 |
"
"
"
| 性能指标 | 方法一 | 方法二 | 方法三 |
|---|---|---|---|
| 垂向加速度 | 0.824 0 | 1.006 3 | 1.017 3 |
| 俯仰角加速度 | 0.010 9 | 0.012 1 | 0.013 0 |
| 侧倾角加速度 | 7.488 7e-4 | 8.714 6e-4 | 8.371 2e-4 |
"

"
| 性能指标 | 方法一 | 方法二 | 方法三 |
|---|---|---|---|
| 垂向加速度 | 0.847 6 | 1.108 1 | 1.144 4 |
| 俯仰角加速度 | 0.009 8 | 0.011 6 | 0.011 5 |
| 侧倾角加速度 | 0.006 4 | 0.007 7 | 0.008 1 |
"
"
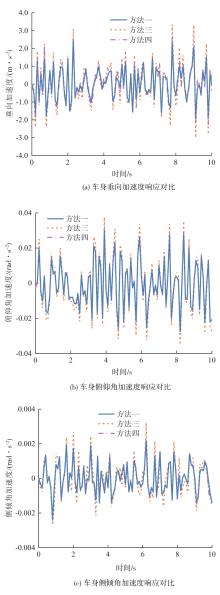
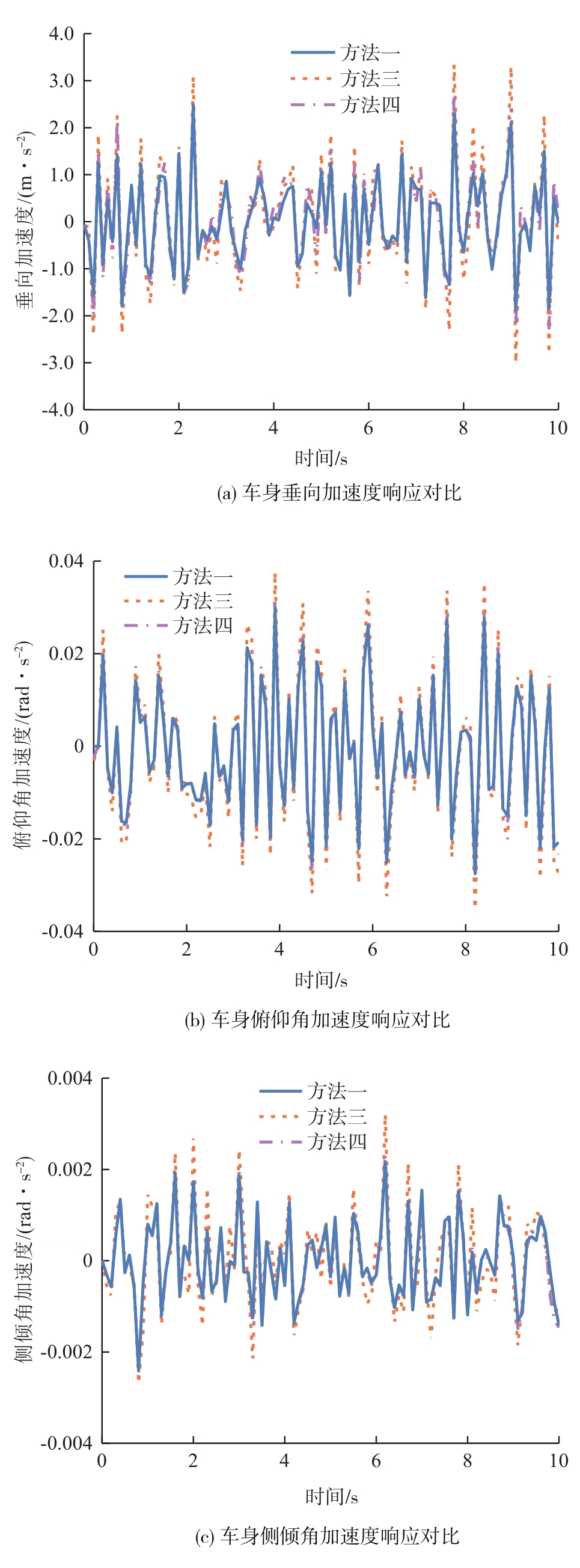
| 性能指标 | 方法一 | 方法三 | 方法四 |
|---|---|---|---|
| 垂向加速度 | 0.920 1 | 1.268 0 | 1.060 0 |
| 俯仰角加速度 | 0.013 4 | 0.017 0 | 0.014 1 |
| 侧倾角加速度 | 8.7392e-4 | 0.001 1 | 9.1147e-4 |
| 1 | 崔明阳, 黄荷叶, 许庆, 等. 智能网联汽车架构、功能与应用关键技术[J]. 清华大学学报(自然科学版), 2022, 62(3): 493-508. |
| CUI M Y, HUANG H Y, XU Q, et al. Survey of intelligent and connected vehicle technologies: architectures, functions and applications[J]. Journal of Tsinghua University(Science and Technology), 2022, 62(3): 493-508. | |
| 2 | GONG M D, WANG H H, WANG X. Active suspension control based on estimated road class for off-road vehicle[J]. Mathematical Problems in Engineering, 2019(4): 1-17. |
| 3 | WU J, ZHOU H L, LIU Z Y, et al. Ride comfort optimization via speed planning and preview semi-active suspension control for autonomous vehicles on uneven roads[J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8343-8355. |
| 4 | YANG Z, ZHENG Y, GU S, et al. A study on a vehicle semi-active suspension control system based on road elevation identification[J]. PLos One, 2022, 17(6): 1-27. |
| 5 | 孙晋伟, 秦也辰, 王振峰. 基于路面识别的非线性悬架系统自适应控制[J]. 东北大学学报(自然科学版), 2018, 39(9): 1299-1303. |
| SUN J W, QIN Y C, WANG Z F. Adaptive control of the nonlinear suspension system based on road estimation[J]. Journal of Northeastern University(Natural Science), 2018, 39(9): 1299-1303. | |
| 6 | 巩明德, 颜鑫. 采用路面识别方法的重型救援车辆主动悬架控制策略[J]. 西安交通大学学报, 2019, 53(2): 32-39. |
| GONG M D, YAN X. A control strategy for active suspension of heavy rescue vehicles based on road level estimation[J]. Journal of Xi’an Jiaotong University, 2019, 53(2): 32-39. | |
| 7 | PANG H, WANG Y, ZHANG X, et al. Robust state-feedback control design for active suspension system with time-varying input delay and wheelbase preview information[J]. Journal of the Franklin Institute, 2019, 356(4): 1899-1923. |
| 8 | 张志勇, 王建波, 胡林, 等. 考虑路面预瞄信息和参数不确定性的空气悬架半主动控制[J]. 振动与冲击, 2020, 39(23): 21-29. |
| ZHANG Z Y, WANG J B, HU L, et al. Semi-active control of air suspension considering pavement preview information and parametric uncertainty[J].Journal of Vibration And Shock, 2020, 39(23): 21-29. | |
| 9 | ZHAO J, HUA X, CAO Y, et al. Design of an integrated controller for active suspension systems based on wheelbase preview and wavelet noise filter[J]. Journal of Intelligent and Fuzzy Systems, 2019, 36(4): 3911–3921. |
| 10 | HU H Z, WU G Q, MAO L B. Preview control of semi-active suspension with adjustable damping based on machine vision[C]. 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), 2021: 117-123. |
| 11 | 刘秋, 孙晋伟, 张华, 等. 基于卷积神经网络的路面识别及半主动悬架控制[J]. 兵工学报, 2020, 41(8): 1483-1493. |
| LIU Q, SUN J W, ZHANG H, et al. Road identification and semi-active suspension control based on convolutional neural network[J]. Acta Armamentarii, 2020, 41(8): 1483-1493. | |
| 12 | MYRON P,ALEX A. Active vehicle suspension control using road preview model predictive control and radial basis function networks[J]. Applied Soft Computing, 2022, 120: 108646. |
| 13 | YONGHWAN J,YOUNGIL S, SEHYUN C, et al. Design of virtual reference feedforward controller for an active suspension system[J]. IEEE Access,2022, 10: 65671-65684. |
| 14 | 陈潇凯, 曾洺锴, 刘向, 等. 基于VSL-MPC的半主动悬架预瞄控制研究[J]. 汽车工程, 2022, 44(10): 1537-1637. |
| CHEN X K, ZENG M K, LIU X, et al. Research on semi-active suspension preview control based on VSL-MPC[J]. Automotive Engineering, 2022, 44(10): 1537-1637. | |
| 15 | ZHAO J, WANG X W, WONG O K, et al. Multi-objective frequency domain-constrained static output feedback control for delayed active suspension systems with wheelbase preview information[J]. Nonlinear Dyn, 2021,103:1757-1774. |
| 16 | 李子先, 潘世举, 徐友春. 分布式电驱动车辆底盘稳定性协同控制研究综述[J]. 汽车技术, 2022(9): 1-14. |
| LI Z X, PAN S J, XU Y C. Review on cooperative control of chassis stability for distributed electric vehicles[J]. Automobile Technology,2022(9):1-14. | |
| 17 | THEUNISSEN J, TOTA A, GRUBER P, et al. Preview-based techniques for vehicle suspension control: a state-of-the-art review[J]. Annual Reviews in Control, 2021, 51(2): 1-30. |
| 18 | 唐斌, 许占祥, 江浩斌, 等.基于分段优化的车辆换道避障轨迹规划[J]. 汽车工程, 2022, 44(6): 831-841. |
| TANG B, XU Z X, JIANG H B, et al. Trajectory planning of intelligent vehicles in lane change for collision avoidance based on segmented optimization[J]. Automotive Engineering, 2022, 44(6): 831-841. | |
| 19 | ZHAO D X, WANG L L, LI Y L, et al. Extraction of preview elevation of road based on 3D sensor[J]. Measurement, 2018, 127: 104-114. |
| 20 | ZACHARY R, DETWEILER, JOHN B. Ferris.Interpolation methods for high-fidelity three-dimensional terrain surfaces[J]. Journal of Terramechanics, 2010, 47(4): 209-217. |
| 21 | 潘世举, 李华, 苏致远, 等. 基于跟踪误差模型的智能车辆轨迹跟踪方法[J]. 汽车工程, 2019, 41(9): 1021-1027. |
| PAN S J, LI H, SU Z Y, et al. Trajectory tracking method for intelligent vehicles based on tracking-error model[J]. Automotive Engineering, 2019, 41(9): 1021-1027. | |
| 22 | WANG Z F, DONG M M, GU L, et al. Influence of road excitation and steering wheel input on vehicle system dynamic responses[J]. Applied Sciences, 2017, 7(6):570. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [4] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter [J]. Automotive Engineering, 2023, 45(7): 1200-1211. |
| [7] | Yunfei Zha,Xiaoshan Shi,Hao Wu,Minxu Li,Huiqin Chen. Study of Vehicle Aerodynamics Characteristic Based on Active Tilting Rear Wing [J]. Automotive Engineering, 2023, 45(3): 489-500. |
| [8] | Jinxia Liu,Zhihao Liang,Qiang Wang,Mingxing Wen. Research on the Equivalent Fuel Consumption Minimizing Energy Management Strategy of Through-the-Road Vehicle [J]. Automotive Engineering, 2023, 45(2): 285-292. |
| [9] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [10] | Jie Hu,Xiao Zhang,Min Wei,Lin Chen,Haihua Qing,Changbin Gao. Vehicle Fault Location Method Based on Fuzzy BN and Improved Evidence Theory [J]. Automotive Engineering, 2023, 45(10): 1975-1983. |
| [11] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [12] | Yongtao Liu,Chuanpan Liu,Xiangan Liu,Yisong Chen,Jie Qiao. Automatic Emergency Braking System Based on Model Predictive Control with Adaptive Sampling Time [J]. Automotive Engineering, 2023, 45(1): 32-41. |
| [13] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [14] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [15] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
|