Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (12): 2329-2338.doi: 10.19562/j.chinasae.qcgc.2024.12.018
Previous Articles Next Articles
Jian Wu,Hanlin Wang,Bing Zhu,Jian Zhao,Zhicheng Chen( )
)
Received:2024-04-13
Revised:2024-05-27
Online:2024-12-25
Published:2024-12-20
Contact:
Zhicheng Chen
E-mail:chenzhicheng@jlu.edu.cn
Jian Wu,Hanlin Wang,Bing Zhu,Jian Zhao,Zhicheng Chen. Adaptive Control Strategy for Vehicle Yaw Stability Considering Dynamic Multi-objective Requirements[J].Automotive Engineering, 2024, 46(12): 2329-2338.

"
"

"
"

"
| 路面附着系数 | ||
|---|---|---|
| 0.114 | 0.102 | |
| 0.146 | 0.092 | |
| 0.172 | 0.084 | |
| 0.194 | 0.072 | |
| 0.232 | 0.046 | |
| 0.302 | 0.017 |

"
"
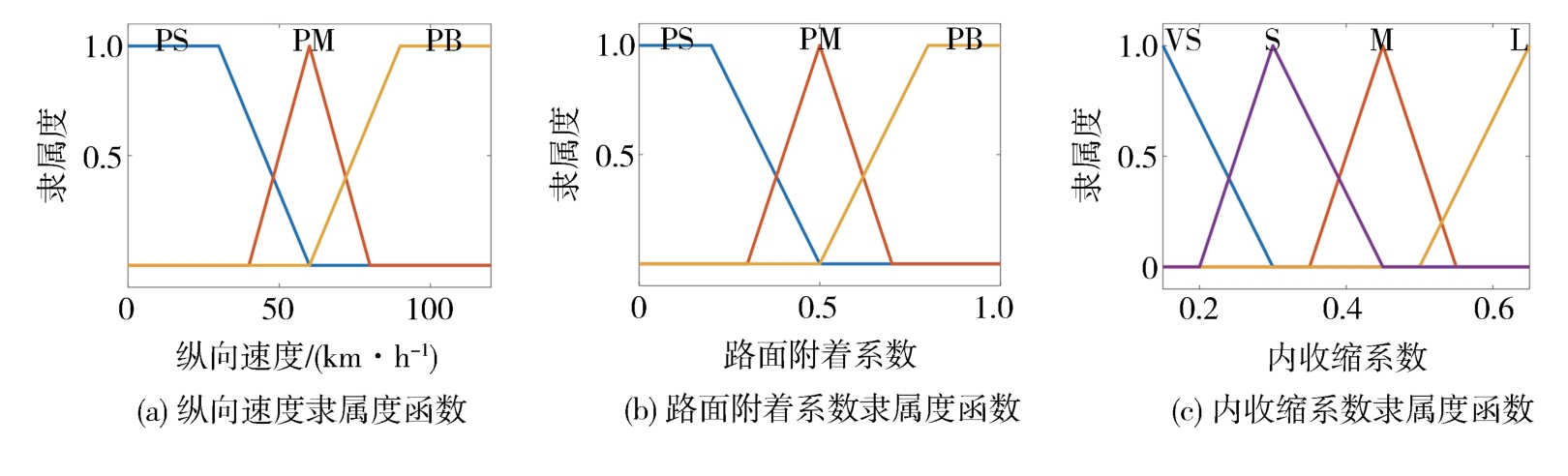
| 特征系数 | 路面附着系数 | |||
|---|---|---|---|---|
| PS | PM | PB | ||
| 纵向速度 | PS | S | M | L |
| PM | VS | S | L | |
| PB | VS | VS | M | |
"
"
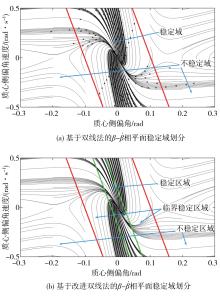
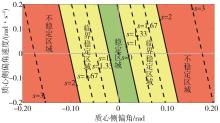
| 行驶状态位置 | 需求说明 |
|---|---|
| 稳定区域 | 横摆操纵性? |
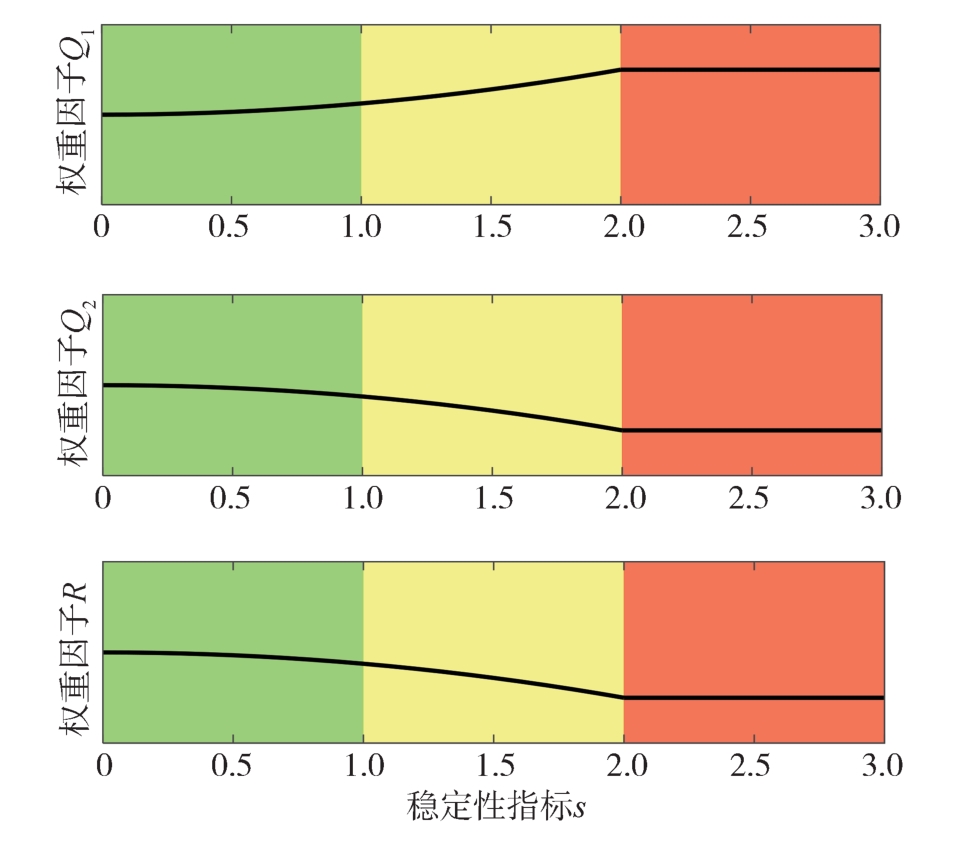
| 临界稳定区域 | 侧向稳定性?,横摆操纵性?,节约能耗? |
| 不稳定区域 | 侧向稳定性? |
"


"
"
| 工况 | 判断准则 | 制动车轮 |
|---|---|---|
| 右前轮 | ||
| 左后轮 | ||
| 无控制 | ||
| 左前轮 | ||
| 右后轮 | ||
| 无控制 | ||
| 右前轮 | ||
| 左后轮 | ||
| 无控制 |
"
| 参数 | 符号 | 数值 |
|---|---|---|
| 车辆质量 | m | 1 020 kg |
| 质心到前轴距离 | 1.165 m | |
| 质心到后轴距离 | 1.165 m | |
| 轮距 | 1.48 m | |
| 绕z轴转动惯量 | 1 020 | |
| 车轮转动惯量 | 1.1 | |
| 车轮半径 | 0.308 m | |
| 前轮制动效能因数 | 200 | |
| 后轮制动效能因数 | 100 |
"
| 参数 | 符号 | 数值 |
|---|---|---|
| 采样时间 | 0.02 s | |
| 控制时域 | 5 | |
| 控制器A参数 | ||
| 2 | ||
| 18.6 | ||
| 8.9 | ||
| 10.5 | ||
| 控制器B参数 | ||
| 19 | ||
| 控制器C参数 | Q | diag |
| R | 0.000 02 |
"

"


"

"

| 1 | 林程, 梁晟, 宫新乐, 等. 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44(9): 1372-1385. |
| LIN C, LIANG C, GONG X L, et al. Integrated dynamic control strategy for extreme maneuvers of 4WID EVs[J]. Automotive Engineering, 2022, 44(9): 1372-1385. | |
| 2 | LI Z H, CHEN H, LIU H H, et al. Integrated longitudinal and lateral vehicle stability control for extreme conditions with safety dynamic requirements analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19285-19298. |
| 3 | WANG H B, ZHOU J T, HU C L, et al. Vehicle lateral stability control based on stability category recognition with improved brain emotional learning network[J]. IEEE Transactions on Vehicular Technology, 2022, 71(6): 5930-5943. |
| 4 | 李子先, 潘世举, 徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| LI Z X, PAN S J, XU Y C. Coordinated control of AFS and DYC for 8-wheel distributed electric drive vehicle[J]. Automotive Engineering, 2023, 45(3): 409-420. | |
| 5 | WANG J N, LUO Z, WANG Y, et al. Coordination control of differential drive assist steering and vehicle stability control for four-wheel-independent-drive EV[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 11453-11467. |
| 6 | DI CAIRANO S, TSENG H E, BERNARDINI D, et al. Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1236-1248. |
| 7 | 梁宝钰,汪怡平,刘珣,等. 基于滑模理论的高速车辆侧风稳定性控制研究[J]. 汽车工程,2022, 44(1): 123-130. |
| LIANG B Y, WANG Y P, LIU X, et al. Study on crosswind stability control of high-speed vehicle based on sliding mode theory[J]. Automotive Engineering, 2022, 44(1): 123-130. | |
| 8 | ZHANG J, WANG H, MA M Y, et al. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14713-14726. |
| 9 | 赵越,胡纪滨,吴维,等. 无人车全轮蟹行转向稳定性鲁棒控制与试验验证[J]. 汽车工程, 2022, 44(8): 1126-1135. |
| ZHAO Y, HU J B, WU W, et al. Robust stability control and its verification test for all-wheel diagonal steering of unmanned ground vehicles[J]. Automotive Engineering,2022, 44(8): 1126-1135. | |
| 10 | 陈杰, 李亮, 宋健. 基于LTV-MPC的车辆稳定性控制研究[J]. 汽车工程, 2016, 38(3): 308-336. |
| CHEN J, LI L, SONG J. A study on vehicle stability control based on LTV-MPC[J]. Automotive Engineering, 2016, 38(3): 308-336. | |
| 11 | LI S S, WANG X Y, CUI G J, et al. Yaw and lateral stability control based on predicted trend of stable state of the vehicle[J]. Vehicle System Dynamics, 2022, 61(1): 111-127. |
| 12 | ZHANG Z M, XIE L, LU S, et cl. Vehicle yaw stability control with a two-layered learning MPC[J]. Vehicle System Dynamics, 2023, 61(3): 423-444. |
| 13 | ALAGAPPAN A V, RAO K V N, KUMAR R K. A comparison of various algorithms to extract magic formula tire model coefficients for vehicle dynamics simulations[J]. Vehicle System Dynamics, 2015, 53(2): 154-178. |
| 14 | 钟龙飞,彭育辉,江铭. 基于相平面的分布式驱动电动汽车稳定性控制[J]. 汽车工程, 2021,43(5):721-729. |
| ZHONG L F, PENG Y H, JIANG M. Stability control of distributed driven electric vehicle based on phase plane[J]. Automotive Engineering, 2021,43(5):721-729. | |
| 15 | ZHOU C, LIU X H, XU F X. Intervention criterion and control strategy of active front steering system for emergency rescue vehicle[J]. Mechanical Systems and Signal Processing, 2021, 148: 107160. |
| [1] | Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons [J]. Automotive Engineering, 2024, 46(9): 1587-1599. |
| [2] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhicheng Chen,Jian Wu. Adaptive Pressure Control Strategy for Integrated Electro-Hydraulic Braking System [J]. Automotive Engineering, 2024, 46(8): 1479-1488. |
| [3] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [4] | Guizhen Feng,Dongpeng Zhao,Shaohua Li. Research on Air Spring Modeling Based on Fractional Order and Electric Vehicle Active Suspension Control [J]. Automotive Engineering, 2024, 46(7): 1282-1293. |
| [5] | Lisheng Jin,Hongyu Zhang,Baicang Guo. Semi Solid-State LiDAR Object Detection Algorithm Enhanced by Feature Stability Enhancement [J]. Automotive Engineering, 2024, 46(6): 1015-1024. |
| [6] | Bing Zhu,Yanpeng Tang,Dongbo Zhang,Jian Zhao,Zhicheng Chen. Adaptive Pressure Control for Electronic Boost Brake System Considering Multi-dimensional Nonlinear Disturbances [J]. Automotive Engineering, 2024, 46(6): 1096-1103. |
| [7] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [8] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [9] | Xiaohu Geng,Yao Fu,Jie Wang,Yulong Lei,Weidong Liu,Yuhai Wang,Ke Liu. Predictive Cruise Control for Commercial Vehicles Considering Different Time Domains [J]. Automotive Engineering, 2024, 46(11): 2046-2058. |
| [10] | Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou. Chassis Coordinated Control for Lateral Stability of Four-in-Wheel-Motor-Drive Vehicles [J]. Automotive Engineering, 2024, 46(10): 1733-1743. |
| [11] | Tong Wu,Jing Rong,Junnian Wang,Wen Sun,Liang Chu,Linhe Ge. Dynamic Braking Allocation Strategy for Turning-Braking Maneuver [J]. Automotive Engineering, 2024, 46(10): 1755-1765. |
| [12] | Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift [J]. Automotive Engineering, 2024, 46(10): 1780-1789. |
| [13] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [14] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [15] | Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability [J]. Automotive Engineering, 2024, 46(10): 1829-1841. |
|