Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (6): 1144-1154.doi: 10.19562/j.chinasae.qcgc.2025.06.013
Xin Jia( ),Songlin Li,Yuansheng She,Feng Hong
),Songlin Li,Yuansheng She,Feng Hong
Received:2024-09-17
Revised:2025-04-05
Online:2025-06-25
Published:2025-06-20
Contact:
Xin Jia
E-mail:jiaxin@jlu.edu.cn
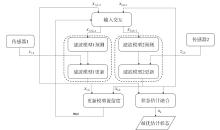
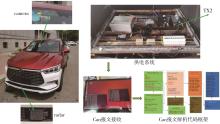
Xin Jia,Songlin Li,Yuansheng She,Feng Hong. Research on Environmental Perception Information Unified Fusion Method of Intelligent Vehicle Based on Interactive Multiple Models[J].Automotive Engineering, 2025, 47(6): 1144-1154.
"


"

"

"
"
"

"

"
"
"
"
"
"
"

| 1 | DARMS M, WINNER H. A modular system architecture for sensor data processing of ADAS applications[C]. Intelligent Vehicles Symposium, 2005. Proceedings. IEEE. |
| 2 | SCHREIER M, WILLERT V, ADAMY J. Compact representation of dynamic driving environments for ADAS by parametric free space and dynamic object maps[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2):367-384. |
| 3 | AEBERHARD M. Object-level fusion for surround environment perception in automated driving applications[D]. Technische University of Dortmund, 2017. |
| 4 | GARCIA F, PONZ A, MARTIN D, et al. Computer vision and laser scanner road environment perception[C]. International Conference on Systems, Signals and Image Processing. IEEE, 2014:63-66. |
| 5 | 韩崇昭, 朱洪艳, 段战胜. 多源信息融合[M]. 2版.北京:清华大学出版社, 2010. |
| HAN C Z, ZHU H Y, DUAN Z S. Multi-source information fusion [M]. 2nd ed.Beijing:Tsinghua University Press, 2010. | |
| 6 | 李墨. 面向无人驾驶汽车的雷达-视觉集成控制器研究[D]. 长春:吉林大学, 2017. |
| LI M. Research on radar-vision integrated controller for unmanned driving vehicles [D]. Changchun:Jilin University, 2017. | |
| 7 | PREMEBIDA C, MONTEIRO G, NUNES U, et al. A lidar and vision-based approach for pedestrian and vehicle detection and tracking[C]. Intelligent Transportation Systems Conference, 2007. Itsc. IEEE, 2007:1044-1049. |
| 8 | LIU X, CAI Z. Advanced obstacles detection and tracking by fusing millimeter wave radar and image sensor data[C]. International Conference on Control Automation and Systems. IEEE, 2010:1115-1120. |
| 9 | 麦新晨. 基于多传感器融合的车辆检测与跟踪[D]. 上海:上海交通大学, 2011. |
| MAI Xinchen. Vehicle detection and tracking based on multi-sensor fusion[D]. Shanghai: Shanghai Jiaotong University, 2011. | |
| 10 | 辛煜, 梁华为, 梅涛,等. 基于激光传感器的无人驾驶汽车动态障碍物检测及表示方法[J]. 机器人, 2014, 36(6):654-661. |
| XIN Yu, LIANG Huawei, MEI Tao, et al. Dynamic obstacle detection and representation approach for unmanned vehicles based on laser sensor[J]. Robot, 2014, 36(6): 654-661. | |
| 11 | 闫光. 基于多传感器信息融合的动态目标检测与识别[D]. 北京:北京理工大学, 2015. |
| YAN Guang. Moving target detection and recognition based on multi-sensor information fusion[D]. Beijing: Beijing Institute of Technology, 2015. | |
| 12 | WANG X, XU L, SUN H, et al. On-road vehicle detection and tracking using MMW radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7):2075-2084. |
| 13 | KIM S, KIM H, YOO W, et al. Sensor fusion algorithm design in detecting vehicles using laser scanner and stereo vision[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4):1072-1084. |
| 14 | 刘志强,张光林,邱惠敏.基于多传感融合的目标跟踪方法研究[J]. 重庆理工大学学报(自然科学), 2021, 35(2): 1-7. |
| LIU Zhiqiang, ZHANG Guanglin, QIU Huimin. Research on target tracking method based on multi-sensor fusion[J]. Journal of Chongqing University of Technology(Natural Science), 2021, 35(2): 1-7. | |
| 15 | CHAVEZ-GARCIA R O, AYCARD O. Multiple sensor fusion and classification for moving object detection and tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2):525-534. |
| 16 | 佘远昇. 智能汽车近程交通车辆的综合认知[D]. 长春:吉林大学, 2019. |
| SHE Y S. Comprehensive cognition of near-range traffic vehicles for intelligent vehicles [D]. Changchun:Jilin University, 2019. | |
| 17 | HU Jiusong, HU Congwei. A WiFi indoor location tracking algorithm based on improved weighted k nearest neighbors and Kalman filter[J]. IEEE Access, 2023, 11: 32907-32918. |
| 18 | MERCIER D, LEFÈVRE É, JOLLY D. Object association with belief functions, an application with vehicles[J]. Information Sciences, 2011, 181(24):5485-5500. |
| 19 | BAO Han, GUAN Xin, JIA Xin, et al. A study on maneuvering obstacle motion state estimation for intelligent vehicle using adaptive Kalman filter based on current statistical model[J]. Mathematical Problems in Engineering, 2015. |
| 20 | 戴洪德,方君,唐亮,等.高超声速机动目标的强跟踪UKF自适应交互多模型算法[J]. 中国惯性技术学报, 2018, 26(3): 338-345. |
| DAI H D, FANG J, TANG L,et al. Strong tracking UKF adaptive interactive multiple model algorithm for hypersonic maneuvering targets [J]. Journal of Chinese Inertial Technology, 2018, 26(3): 338-345. | |
| 21 | 任雪峰,张卓伟,胡喆. 基于交互多模型的机动目标定位滤波方法[J]. 雷达与对抗, 2023, 43(4): 19-23. |
| REN X F, ZHANG Z W, HU Z. Maneuvering target localization filtering method based on interactive multiple models [J]. Radar and Countermeasures, 2023, 43(4): 19-23. | |
| 22 | 张红玉. 基于交互多模型的机动目标跟踪算法研究[D]. 大连:大连海事大学, 2017. |
| ZHANG H Y. Research on maneuvering target tracking algorithm based on interactive multiple models [D]. Dalian: Dalian Maritime University, 2017. | |
| 23 | 洪峰. 智能汽车交通车辆的综合认知及其虚拟测试方法研究[D]. 长春:吉林大学, 2018. |
| HONG Feng. Research on comprehensive cognition of traffic vehicles and virtual test for intelligent vehicle[D] . Changchun:Jilin University, 2018. |
| [1] | Lu Xiong,Jiaqi Zhu,Mengyuan Chen,Ziyao Li,Qiang Shu,Guirong Zhuo. Positioning Method Based on Slip Ratio Compensation for Intelligent Vehicles [J]. Automotive Engineering, 2025, 47(5): 851-858. |
| [2] | Bing Zhu,Rui Tang,Jian Zhao,Peixing Zhang,Wenxu Li,Jiasheng Li,Xuefeng Xu. Virtual Simulation Testing Method for Intelligent Vehicle Based on Large Language Model [J]. Automotive Engineering, 2025, 47(4): 587-597. |
| [3] | Xianghao Meng,Ling Niu,Junqiang Xi,Danni Chen,Chao Lü. Risk Prediction of Heterogeneous Traffic Participants Based on Spatio-Temporal Graph Neural Networks [J]. Automotive Engineering, 2024, 46(9): 1537-1545. |
| [4] | Xiujian Yang,Yongrui Bai. Trajectory Planning for Intelligent Vehicle in Dynamic Unstructured Environment Based on the Graph Search and Optimization Methods [J]. Automotive Engineering, 2024, 46(9): 1564-1575. |
| [5] | Jing Zhao,Hao Liang,Tianxiao Xu,Yayue Xiao,Bowen Jiang. Research on Domain Specific Modeling Language for Intelligent Vehicle Cyber-Physical System [J]. Automotive Engineering, 2024, 46(8): 1370-1381. |
| [6] | Jialiang Zhu,Qiaobin Liu,Fan Yang,Lu Yang,Weihua Li. Two-Dimensional Collision Risk Prediction for Intelligent Vehicles Considering the Influence of Heterogeneous Vehicle Types [J]. Automotive Engineering, 2024, 46(8): 1414-1421. |
| [7] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [8] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [9] | Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Jingwei Xue. A Criticality Assessment Model for the Intelligent Vehicle Test Scenario Based on the Onboard Camera Images [J]. Automotive Engineering, 2024, 46(4): 557-563. |
| [10] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [11] | Wenxuan Shen,Rui Dai,Puyuan Tan,Qing Zhou. A Review of Reclined Occupant Crash Injuries and Impact Protection [J]. Automotive Engineering, 2024, 46(12): 2241-2256. |
| [12] | Zhongjie Liu,Zhiguo Zhao,Qin Yu. Vehicle Assisted Driving Behavior Decision-Making Based on Dynamic Risk Assessment [J]. Automotive Engineering, 2024, 46(11): 2005-2016. |
| [13] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [14] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [15] | Junhui Zhang,Xiaoman Guo,Yuxi Liu,Mingqiang Zheng,Yuhan Qian,Yuxuan Ding. Driver-Automation Shared Lane-Keeping Robust Control [J]. Automotive Engineering, 2024, 46(10): 1853-1862. |
|
||