Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (3): 350-361.doi: 10.19562/j.chinasae.qcgc.2022.03.006
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Yingfeng Cai1,Ziheng Lu1,Yicheng Li1,Long Chen1,Hai Wang2( )
)
Received:2021-10-09
Revised:2021-11-06
Online:2022-03-25
Published:2022-03-25
Contact:
Hai Wang
E-mail:wanghai1019@163.com
Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion[J].Automotive Engineering, 2022, 44(3): 350-361.
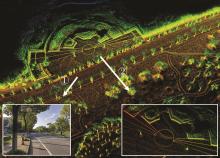
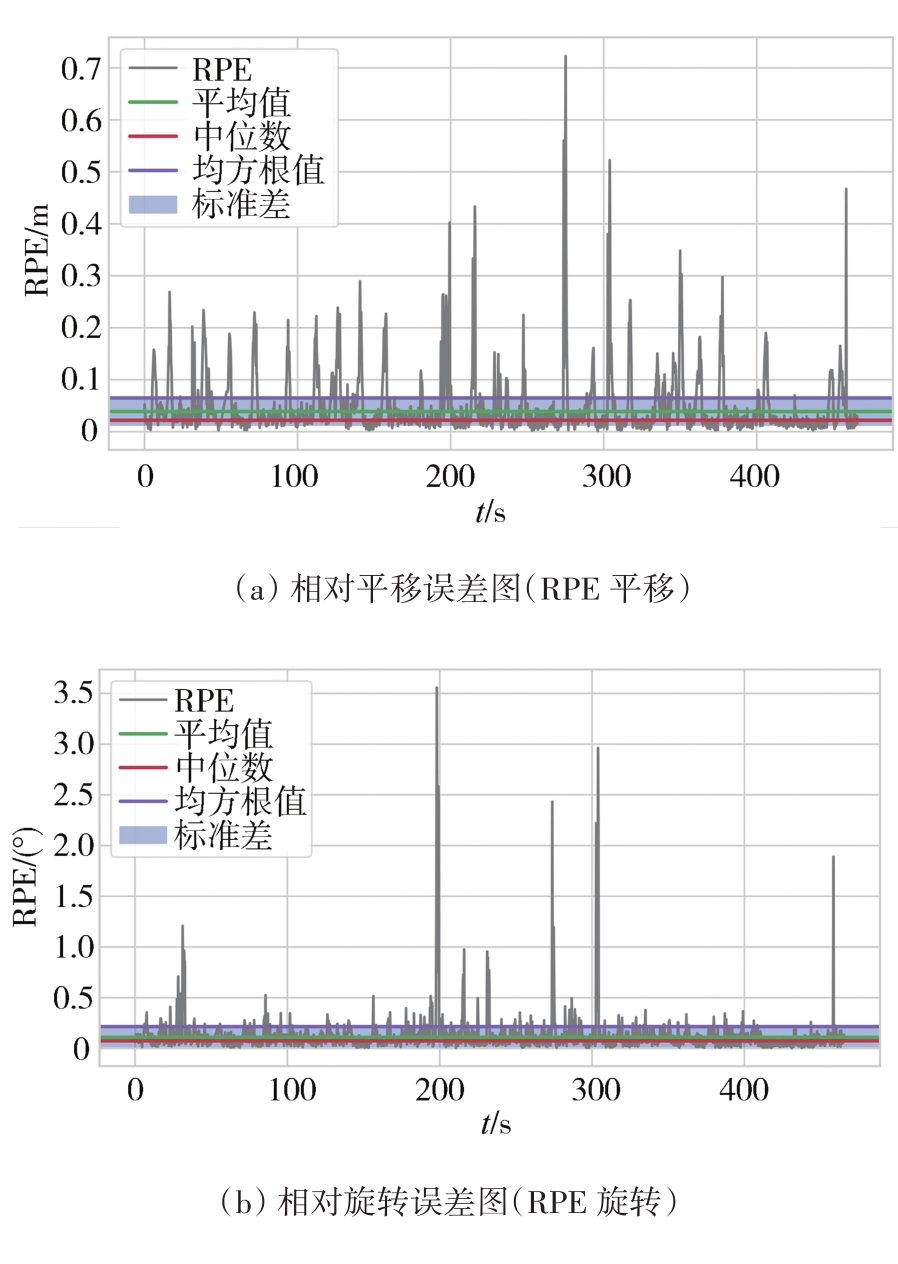
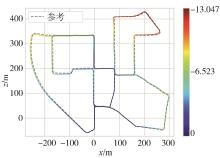
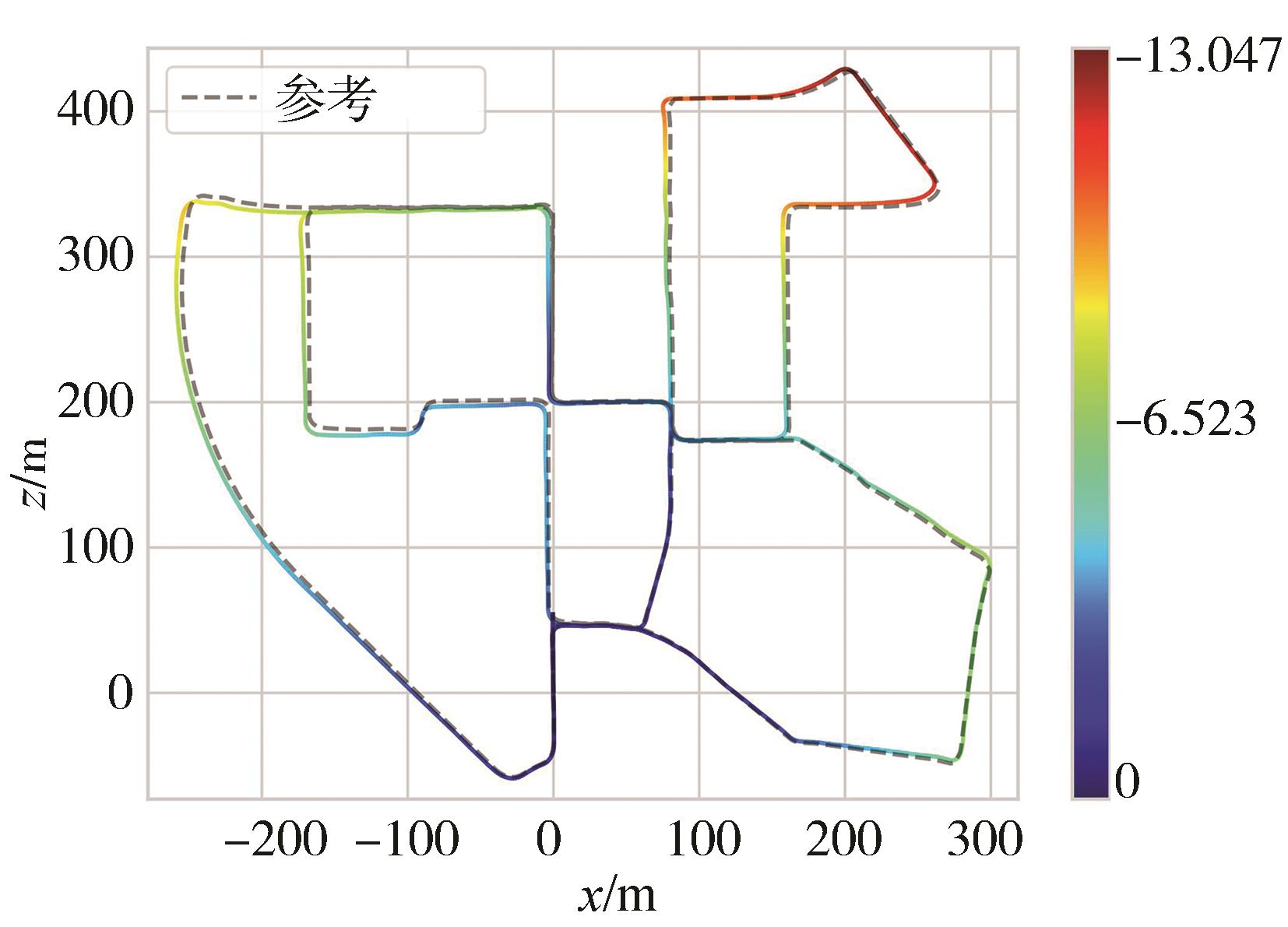
"
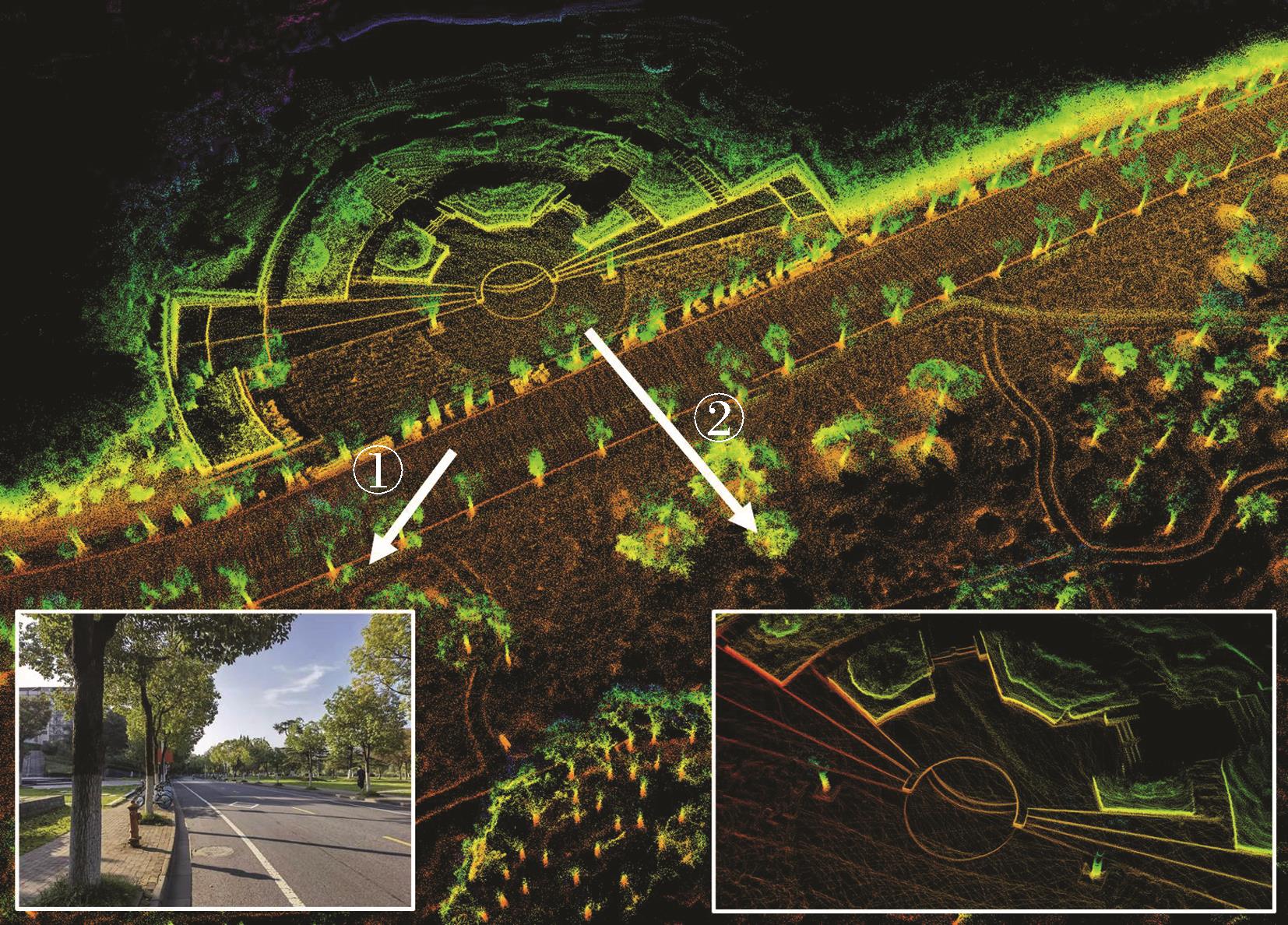

"
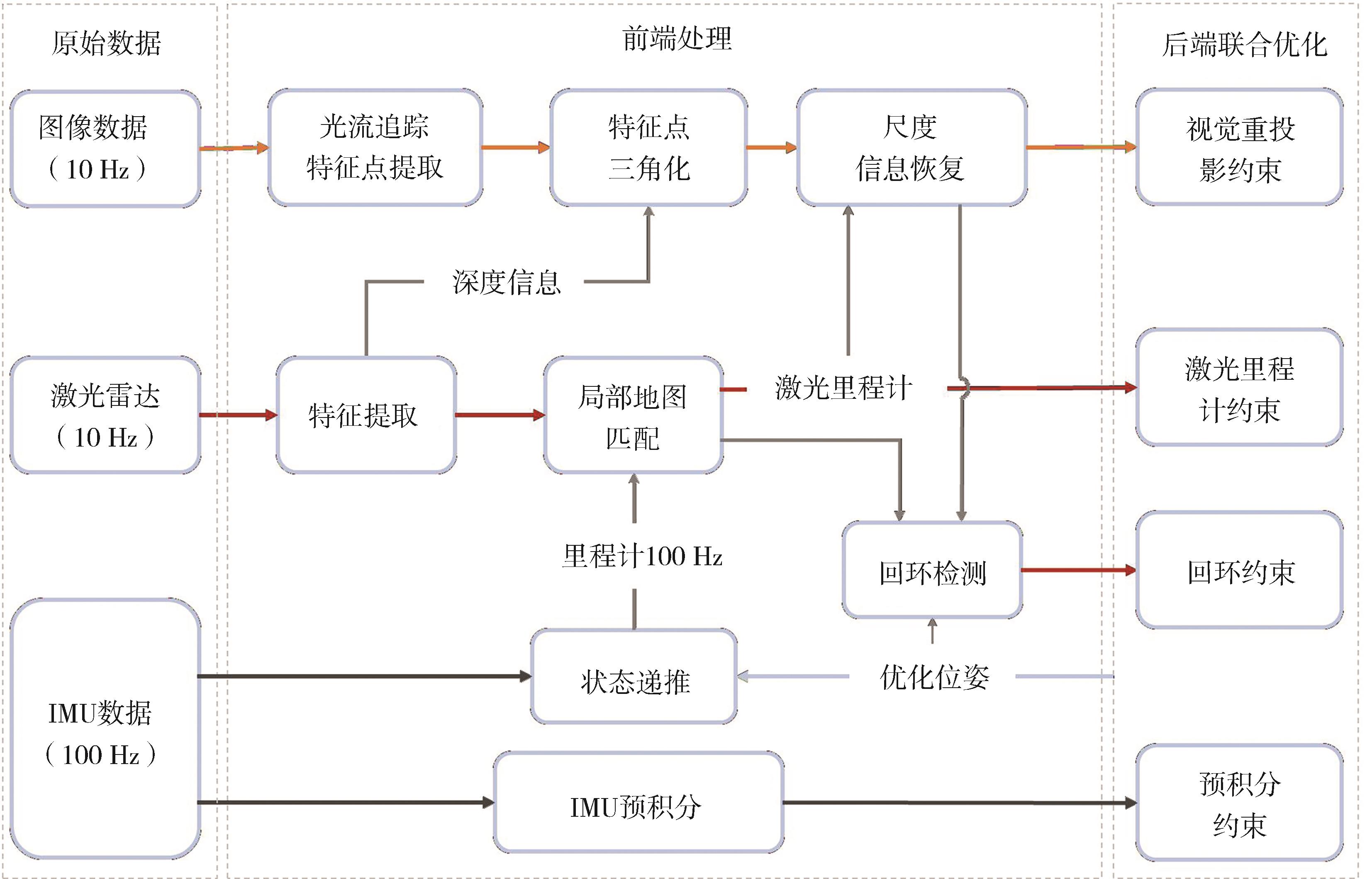

"
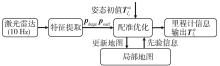
"
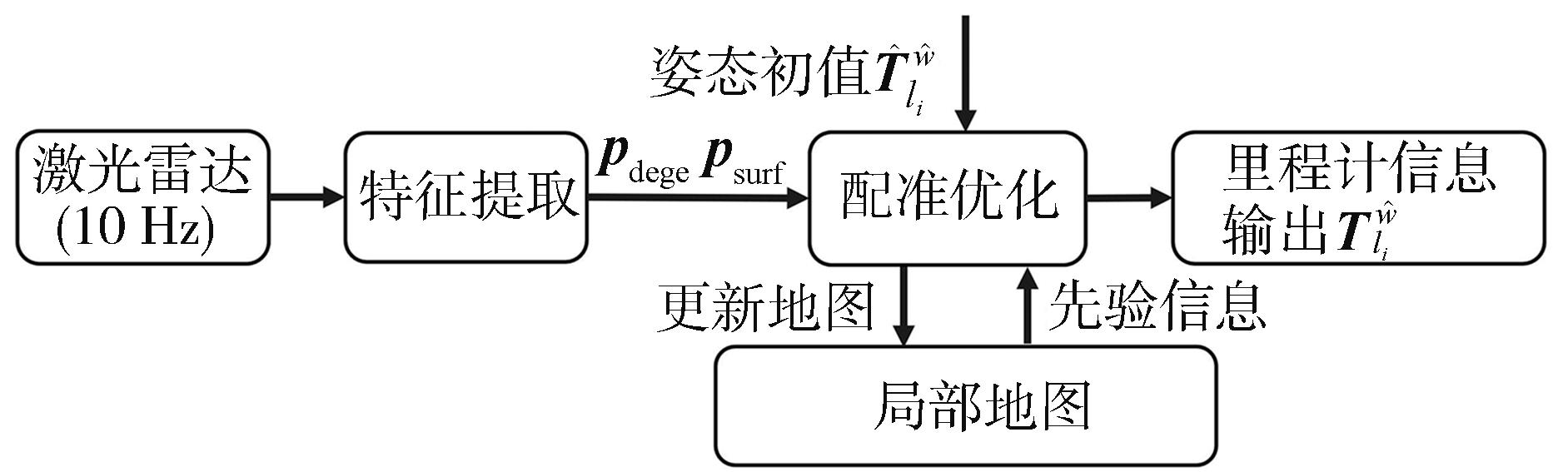

"
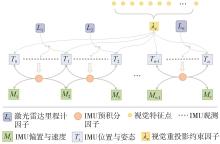
"
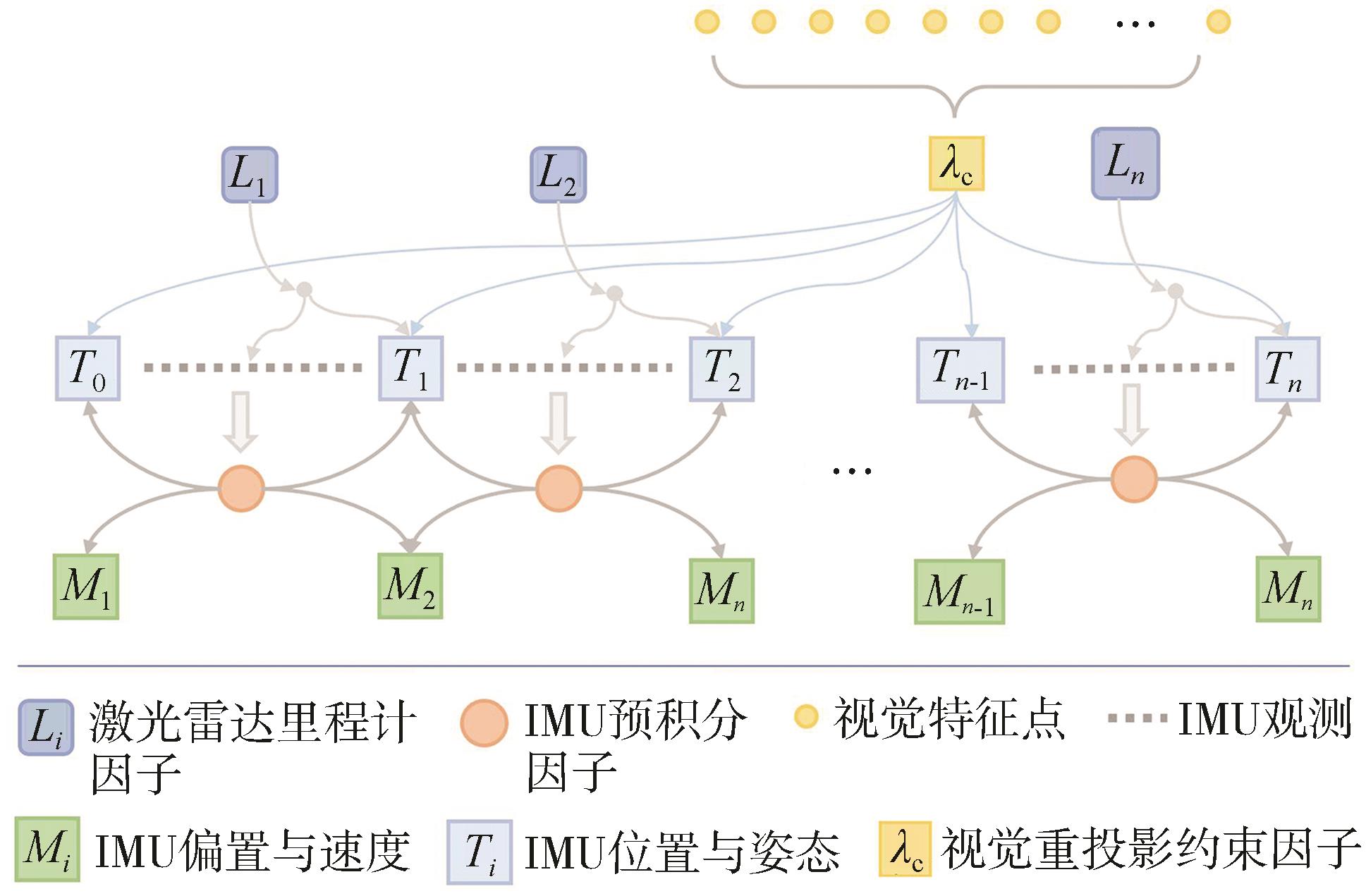
"
"
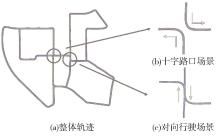
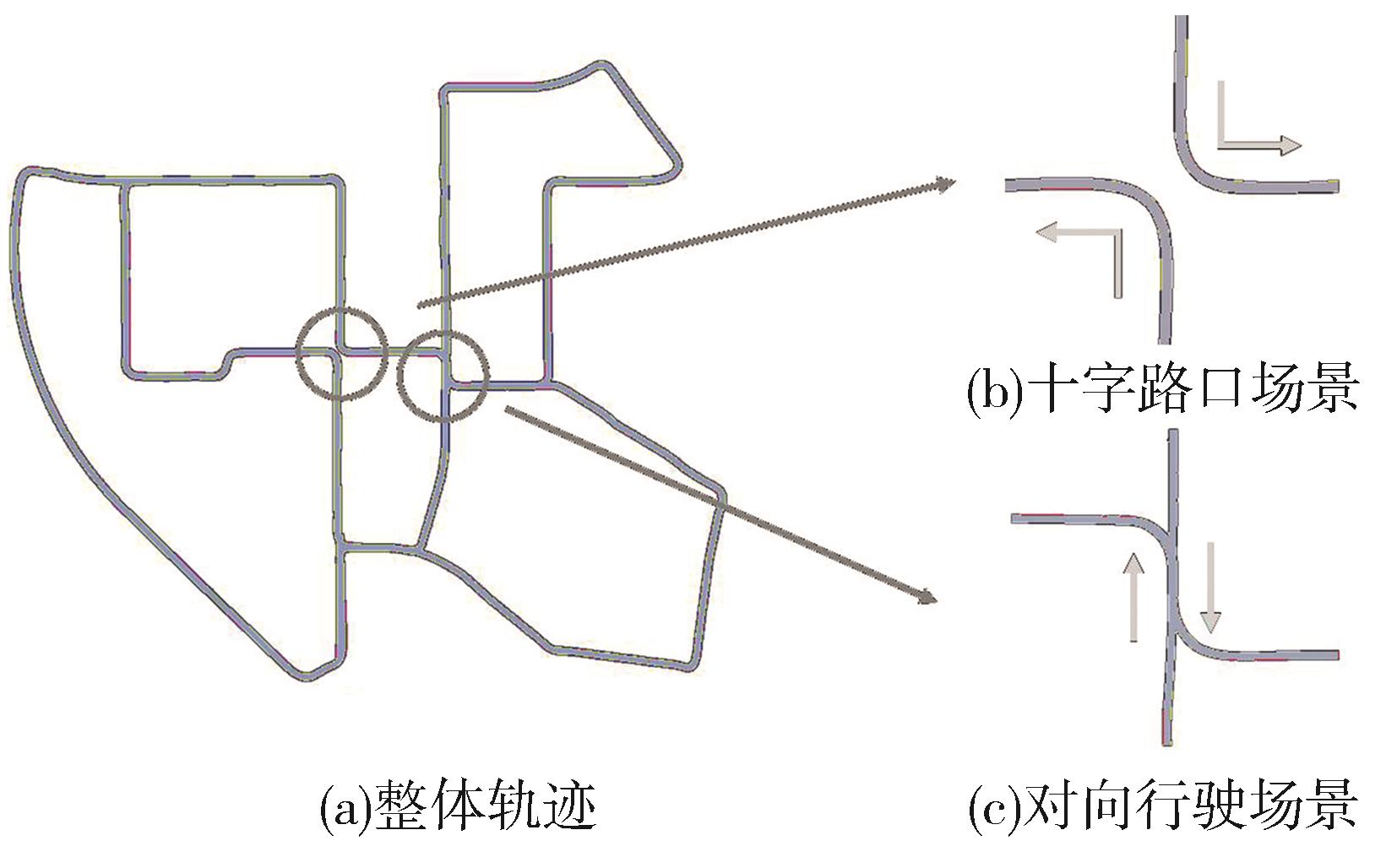
| 序列 | 指标 | |||
|---|---|---|---|---|
| 帧数 | 时长/s | 长度/m | 最大速度/(m·s-1) | |
| 序列0 | 4 544 | 471 | 3 682 | 12.9 |
| 序列5 | 2 762 | 288 | 2 205 | 11.1 |
| 序列8 | 5 177 | 536 | 3 213 | 12.5 |

"

"
"
"
| 方法 | 轨迹 距离/m | 数据集序列(RPE 平移(%)/ RPE 旋转((°)·100 m-1)) | 均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
KITTI 00 城镇 | KITTI 01 高速 | KITTI 05 郊区 | KITTI 06 城镇 | KITTI 07 城镇 | KITTI 08 城镇 | KITTI 09 城镇 | KITTI 10 郊区 | |||
| 本文方法 | 100 | 1.06/0.60 | 1.28/0.65 | 0.67/0.46 | 0.68/0.75 | 0.69/0.48 | 1.24/0.55 | 0.91/0.49 | 0.83/0.68 | 0.92/0.49 |
| 200 | 0.97/0.57 | 1.26/0.62 | 0.80/0.40 | 0.59/0.62 | 0.74/0.27 | 1.15/0.43 | 1.13/0.48 | 0.67/0.56 | ||
| 300 | 0.76/0.43 | 1.00/0.79 | 0.99/0.35 | 0.74/0.50 | 0.79/0.22 | 1.19/0.40 | 1.19/0.39 | 1.12/0.44 | ||
| 400 | 0.70/0.22 | 1.02/0.65 | 0.67/0.27 | 0.41/0.48 | 1.24/0.35 | 1.17/0.39 | 0.94/0.69 | |||
| LIMO | 100 | 1.11/0.58 | 2.31/0.76 | 1.07/1.18 | 3.01/0.68 | 1.40/1.04 | 1.68/1.02 | 1.26/1.29 | 1.02/0.77 | 1.57/0.71 |
| 200 | 1.18/0.45 | 2.57/0.72 | 1.05/0.87 | 2.50/0.44 | 1.31/0.53 | 1.48/0.85 | 1.62/1.15 | 0.91/0.58 | ||
| 300 | 1.09/0.34 | 2.91/0.63 | 1.17/0.59 | 1.87/0.28 | 1.45/0.56 | 1.47/0.97 | 1.66/0.90 | 1.07/0.91 | ||
| 400 | 1.19/0.36 | 3.08/0.61 | 1.04/0.31 | 0.81/0.30 | 1.17/0.52 | 2.26/0.86 | 0.99/0.90 | |||
| LIO-SAM | 100 | 1.51/0.90 | 1.57/1.39 | 0.99/0.94 | 0.94/0.67 | 1.37/0.53 | 1.63/1.01 | 1.05/0.92 | 0.92/0.90 | 1.35/0.74 |
| 200 | 1.22/0.59 | 2.08/1.33 | 0.97/0.63 | 0.94/0.65 | 1.25/0.58 | 1.51/0.80 | 1.27/0.78 | 0.81/0.74 | ||
| 300 | 1.20/0.44 | 2.48/1.21 | 1.06/0.53 | 2.11/0.65 | 1.17/0.53 | 1.41/0.64 | 1.29/0.65 | 1.19/0.65 | ||
| 400 | 1.00/0.45 | 2.90/1.07 | 0.75/0.25 | 1.50/0.55 | 1.34/0.48 | 1.46/0.65 | 1.11/0.82 | |||
| VINS-Mono | 100 | 3.19/0.74 | 25.85/1.25 | 5.25/0.53 | 5.87/1.47 | 11.55/0.98 | 7.46/0.58 | 10.73/0.79 | 9.96/0.64 | |
| 200 | 2.84/0.55 | 31.41/1.10 | 4.09/0.37 | 4.80/0.14 | 10.68/0.76 | 7.38/0.60 | 9.32/0.50 | |||
| 300 | 2.37/0.41 | 30.38/1.01 | 2.58/0.28 | 5.68/1.10 | 8.99/0.55 | 6.17/0.43 | 8.06/0.50 | |||
| 400 | 1.86/0.33 | 39.54/0.89 | 1.24/0.32 | 7.54/0.33 | 7.10/0.41 | 7.12/0.37 | ||||
| LOAM | 100 | 1.69/1.04 | 2.25/1.24 | 1.16/1.19 | 0.99/0.86 | 1.39/0.50 | 11.55/0.98 | 1.56/1.62 | 0.91/1.96 | 2.88/1.03 |
| 200 | 1.52/0.61 | 2.85/0.18 | 1.12/1.02 | 1.16/0.85 | 1.70/0.54 | 10.68/0.76 | 1.57/1.98 | 1.36/1.56 | ||
| 300 | 1.54/0.46 | 3.43/1.01 | 1.10/1.13 | 1.68/0.68 | 2.07/0.59 | 8.99/0.55 | 3.98/2.05 | 1.65/1.68 | ||
| 400 | 1.42/0.50 | 3.86/0.85 | 1.45/0.98 | 1.38/0.70 | 7.54/0.33 | 4.27/1.95 | 1.45/1.44 | |||

"
"
| 数据集 | 误差类型 (RMSE) | VINS-Mono | LOAM | LIMO | 本文方法 |
|---|---|---|---|---|---|
| 校园 | RPE / % | 0.511 | 0.166 | 0.156 | 0.130 |
| APE / m | 10.681 | 9.566 | 8.644 | 3.600 |
"
| 1 | BAILEY T, DURRANT-WHYTE H. Simultaneous localization and mapping (SLAM): part II [J]. IEEE Robotics & Automation Magazine, 2006, 13(3): 108-117. |
| 2 | 王海, 李洋, 蔡英凤,等. 基于激光雷达的3D实时车辆跟踪 [J]. 汽车工程, 2021, 43(7): 1013-1021. |
| WANG H, LI Y, CAI Y, et al. 3D real⁃time vehicle tracking based on lidar[J]. Automotive Engineering, 2021, 43(7): 1013-1021. | |
| 3 | 娄新雨, 王海, 蔡英凤, 等. 采用64线激光雷达的实时道路障碍物检测与分类算法的研究 [J]. 汽车工程, 2019, 41(7): 779-784. |
| LOU Xinyu, WANG Hai, CAI Yingfeng, et al. A research on an algorithm for real-time detection and classification of road obstacle by using 64-line lidar[J]. Automotive Engineering, 2019, 41(7): 779-784. | |
| 4 | MUR-ARTAL R, MONTIEL J M M, TARDOS J D. ORB-SLAM: a versatile and accurate monocular SLAM system [J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 5 | MUR-ARTAL R, TARDóS J D. Orb-slam2: an open-source slam system for monocular, stereo, and rgb-d cameras [J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 6 | LEVINSON J, ASKELAND J, BECKER J, et al. Towards fully autonomous driving: systems and algorithms[C]. Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV). |
| 7 | ZHANG J, SINGH S. Low-drift and real-time lidar odometry and mapping [J]. Autonomous Robots, 2017, 41(2): 401-416. |
| 8 | 李兴佳, 李建芬, 朱敏,等. 基于无迹卡尔曼滤波的定位融合与校验算法研究 [J]. 汽车工程, 2021, 43(6): 825-832. |
| LI Xingjia, LI Jianfen,ZHU Min, et al. Research on positioning fusion and verification algorithm based on UKF[J]. Automotive Engineering, 2021, 43(6): 825-832. | |
| 9 | YE H, CHEN Y, LIU M. Tightly coupled 3d lidar inertial odometry and mapping[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 3144-3150. |
| 10 | MOURIKIS A I, ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C]. Proceedings 2007 IEEE International Conference on Robotics and Automation. IEEE, 2007: 3565-3572. |
| 11 | SUN K, MOHTA K, PFROMMER B, et al. Robust stereo visual inertial odometry for fast autonomous flight [J]. IEEE Robotics and Automation Letters, 2018, 3(2): 965-972. |
| 12 | XU W, ZHANG F. Fast-lio: a fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter [J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3317-3324. |
| 13 | LEUTENEGGER S, LYNEN S, BOSSE M, et al. Keyframe-based visual–inertial odometry using nonlinear optimization [J]. The International Journal of Robotics Research, 2015, 34(3): 314-334. |
| 14 | LOELIGER HA, DAUWELS J, HU J, et al. The factor graph approach to model-based signal processing [J]. Proceedings of the IEEE, 2007, 95(6): 1295-1322. |
| 15 | QIN T, LI P, SHEN S. Vins-mono: a robust and versatile monocular visual-inertial state estimator [J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 16 | SHAN T, ENGLOT B, MEYERS D, et al. Lio-sam: tightly-coupled lidar inertial odometry via smoothing and mapping[C]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020: 5135-5142. |
| 17 | FORSTER C, CARLONE L, DELLAERT F, et al. IMU preintegration on manifold for efficient visual-inertial maximum-a-posteriori estimation[C]. Georgia Institute of Technology, 2015. |
| 18 | FORSTER C, CARLONE L, DELLAERT F, et al. On-manifold preintegration for real-time visual-inertial odometry [J]. IEEE Transactions on Robotics, 2016, 33(1): 1-21. |
| 19 | GRAETER J, WILCZYNSKI A, LAUER M. Limo: lidar-monocular visual odometry[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018: 7872-7879. |
| 20 | SHAO W, VIJAYARANGAN S, LI C, et al. Stereo visual inertial lidar simultaneous localization and mapping[C]. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019: 370-377. |
| 21 | SHAN T, ENGLOT B, RATTI C, et al. LVI-SAM: tightly-coupled lidar-visual-inertial odometry via smoothing and mapping [J]. arXiv preprint arXiv:, 2021. |
| 22 | GáLVEZ-LóPEZ D, TARDOS J D. Bags of binary words for fast place recognition in image sequences [J]. IEEE Transactions on Robotics, 2012, 28(5): 1188-9711. |
| 23 | GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset [J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Tao Lu,Xin Jin,Yifei Liao,Shengjie Huang,Yilin Yang,Guotao Xie,Xiaohui Qin. Visual SLAM Based on Jacobian Null-space Marginalization [J]. Automotive Engineering, 2023, 45(8): 1457-1467. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Xiaoqiang Sun, Yulin Wang, Weiwei Hu, Yingfeng Cai, Long Chen, Wong Pak Kin. Research on Estimation Strategy of Vehicle Driving State Based on Tire Piecewise Affine Identification Model [J]. Automotive Engineering, 2023, 45(7): 1212-1221. |
| [5] | Jianhua Chen,Zhongming Xu,Zhifei Zhang. Suspension State Estimation Based on Wheelbase Preview at Variable Speed [J]. Automotive Engineering, 2023, 45(6): 1040-1049. |
| [6] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [7] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [8] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [9] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [10] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [11] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [12] | Cheng Lin,Jiang Yi,Yu Tian. State Estimation and Parameter Identification of Shifting Actuator of Automatic Transmission of Electric Vehicles [J]. Automotive Engineering, 2022, 44(8): 1237-1250. |
| [13] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [14] | Qiu Xia,Te Chen,Long Chen,Xing Xu,Yingfeng Cai. Vehicle Sideslip Angle Estimation Method Based on Redundant Information Fusion [J]. Automotive Engineering, 2022, 44(2): 280-289. |
| [15] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |