Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (12): 1844-1855.doi: 10.19562/j.chinasae.qcgc.2022.12.006
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Longxin Guan1,2,Zufei Gu2,Chao Zhang2,Aichun Wang2,Chenruo Peng2,Huihua Jiang2,Xiaojian Wu1,2( )
)
Received:2022-07-31
Online:2022-12-25
Published:2022-12-22
Contact:
Xiaojian Wu
E-mail:saintwu520@163.com
Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances[J].Automotive Engineering, 2022, 44(12): 1844-1855.

"
"

"

"
"
"
| 参数 | 符号 | 数值 |
|---|---|---|
| 智能汽车质量/kg | 1 830 | |
| 质心到前轴的距离/m | 1.276 | |
| 质心到后轴的距离/m | 1.589 | |
| 转动惯量/(kg·m2) | 3 710.41 | |
| 前轮侧偏刚度/(N·rad-1) | 150 000 | |
| 后轮侧偏刚度/(N·rad-1) | 150 000 | |
| 转向系角传动比isw | 15.9 | |
| 预测时域/控制时域 | 10/2 |
"

"
| 参数 | 横向误差/m | 航向误差/rad | 转向盘转角/(°) | |
|---|---|---|---|---|
| FFC1-MPC | 最大值 | 0.203 3 | 0.152 7 | 354.125 5 |
| 平均值 | 0.045 1 | 0.030 1 | 87.442 0 | |
| FFC2-MPC | 最大值 | 0.559 6 | 0.264 9 | 389.703 6 |
| 平均值 | 0.070 6 | 0.044 7 | 96.676 5 | |
| FFC3-MPC | 最大值 | 0.519 0 | 0.176 0 | 378.152 2 |
| 平均值 | 0.115 3 | 0.031 5 | 90.536 7 | |

"

"
| 参数 | 横向误差/m | 航向误差/rad | 参考曲率 | |
|---|---|---|---|---|
| 不加预瞄 | 最大值 | 0.203 7 | 0.157 6 | 0.126 5 |
| 平均值 | 0.033 2 | 0.023 6 | 0.028 3 | |
| 固定预瞄时间 | 最大值 | 0.195 9 | 0.156 9 | 0.124 9 |
| 平均值 | 0.036 8 | 0.024 3 | 0.028 7 | |
| 动态预瞄模型 | 最大值 | 0.139 8 | 0.070 4 | 0.127 2 |
| 平均值 | 0.027 4 | 0.013 1 | 0.032 8 | |
"
| 参数 | 横向误差/m | 航向误差/rad | 参考曲率 | 计算时间/ms | |
|---|---|---|---|---|---|
| FFC1-动态预瞄 | 最大值 | 0.139 8 | 0.070 4 | 0.127 2 | 5.670 8 |
| 平均值 | 0.027 4 | 0.013 1 | 0.032 8 | 1.175 2 | |
FFC1-动态预瞄- ESO补偿 | 最大值 | 0.100 8 | 0.049 1 | 0.128 0 | 5.388 3 |
| 平均值 | 0.028 8 | 0.014 7 | 0.034 2 | 1.254 4 | |
"

"
"
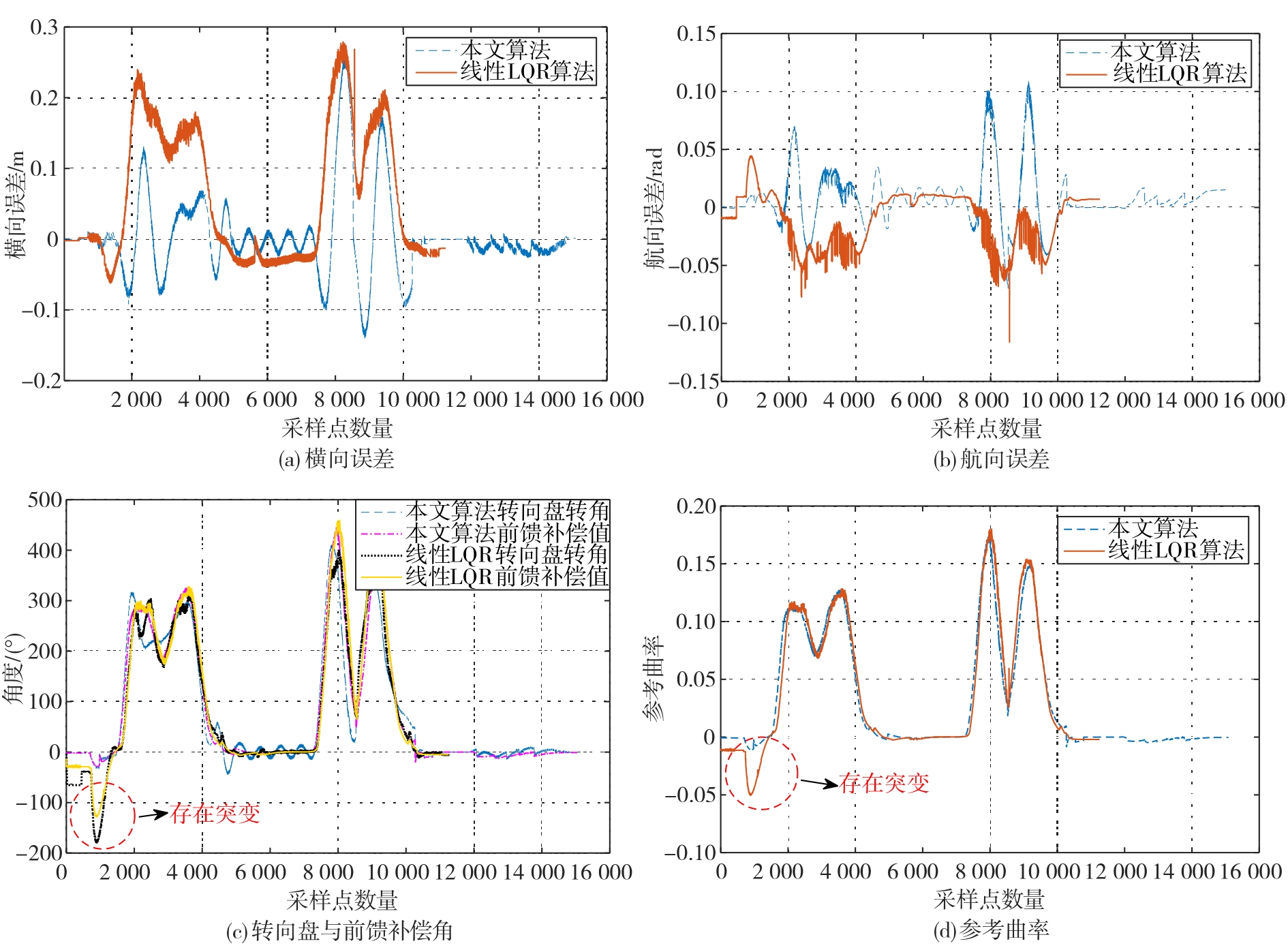
| 参数 | FFC1-动态预瞄-ESO补偿-MPC | |
|---|---|---|
| 最大值 | 平均值 | |
| 横向误差/m | 0.258 1 | 0.021 3 |
| 航向误差/rad | 0.109 5 | 0.010 2 |
| 前馈控制器补偿/(°) | 444.574 9 | 52.322 1 |
| 转向盘转角/(°) | 411.549 1 | 50.772 1 |
| 参考曲率 | 0.174 3 | 0.020 5 |
"
| 参数 | FFC1-动态预瞄-LQR | |
|---|---|---|
| 最大值 | 平均值 | |
| 横向误差/m | 0.278 8 | 0.078 9 |
| 航向误差/rad | 0.116 1 | 0.019 3 |
| 前馈控制器补偿/(°) | 459.405 6 | 116.842 4 |
| 转向盘转角/(°) | 400.925 1 | 113.564 9 |
| 参考曲率 | 0.180 1 | 0.045 8 |
| 1 | ESKANDARIAN A, WU C, SUN C. Research advances and challenges of autonomous and connected ground vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 22(2): 683-711. |
| 2 | 崔明阳, 黄荷叶, 许庆,等. 智能网联汽车架构,功能与应用关键技术[J]. 清华大学学报(自然科学版), 2022, 62(3):16. |
| CUI M Y, HUANG H Y, XU Q, et al. Survey of intelligent and connected vehicle technologies: architectures, functions and applications[J]. Journal of Tsinghua University(Science and Technology), 2022, 62(3):16. | |
| 3 | 胡杰 ,钟鑫凯 ,陈瑞楠 ,等 .基于模糊LQR的智能汽车路径跟踪控制[J].汽车工程,2022,44(1):17-25,43. |
| HU J, ZHONG X K, CHEN R N, et al. Path tracking control of intelligent vehicles based on fuzzy LQR[J]. Automotive Engineering, 2022,44(1):17-25,43. | |
| 4 | 赵树恩, 陈文斌, 邓召学,等. 基于扩张状态观测器的智能汽车弯道轨迹跟踪控制[J]. 汽车安全与节能学报, 2022,13(1):112-121. |
| ZHAO S E, CHEN W B, DENG Z X, et al.Trajectory tracking control for intelligent vehicles driving in curved road based on expanded state observers [J]. Journal of Automotive Safety and Energy, 2022,13(1):112-121. | |
| 5 | FAN Q, CHEN W, HUANG W, et al. Combined magnetic field decoupling and disturbance rejection control of microrobots based on extended state observer[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4032-4039. |
| 6 | JI X, HE X, LV C, et al. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits[J]. Control Engineering Practice, 2018, 76: 41-53. |
| 7 | LI R, HUANG J, PAN X, et al. Path following of underactuated surface ships based on model predictive control with neural network[J]. International Journal of Advanced Robotic Systems, 2020, 17(4): 1729881420945956. |
| 8 | WANG H, HU C, ZHOU J, et al. Path tracking control of an autonomous vehicle with model-free adaptive dynamic programming and RBF neural network disturbance compensation[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(5): 825-841. |
| 9 | CHU D, LI H, ZHAO C, et al. Trajectory tracking of autonomous vehicle based on model predictive control with PID feedback[J]. IEEE Transactions on Intelligent Transportation Systems, 2022:1-12. DOI: 10.1109/TITS.2022.3150365 |
| 10 | YAKUB F, MORI Y. Comparative study of autonomous path-following vehicle control via model predictive control and linear quadratic control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(12): 1695-1714. |
| 11 | 梁军, 朱方博, 蔡英凤, 等. 面向复杂曲率变化的智能车路径跟踪控制[J]. 汽车工程, 2021, 43(12): 1771-1779. |
| LIANG J, ZHU F B, CAI Y F, et al. Intelligent vehicle path tracking control based on complex curvature variation [J]. Automotive Engineering, 2021, 43(12): 1771-1779. | |
| 12 | 张志达,郑玲,张紫微,等.基于自适应模型预测的智能汽车横向轨迹跟踪控制[J/OL].中国公路学报:2022,35(7):305-316. |
| ZHANG Z D, ZHENG L, ZHANG Z W, et al. Lateral trajectory tracking control of intelligent vehicle based on adaptive model prediction[J/OL]. China Journal of Highway and Transport:2022,35(7):305-316. | |
| 13 | XU S, PENG H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(1): 48-58. |
| 14 | 王丽娟,关龙新,张明华,等.运用路径动态预览模型的低速智能汽车侧向跟踪控制研究[J/OL].机械科学与技术:1-8[2022-11-05].DOI:10.13433/j.cnki.1003-8728.20220186. |
| WANG L J, GUAN L X, ZHANG M H, et al. Research on lateral tracking control of low speed intelligent vehicle using dynamic path preview model[J/OL].Mechanical Science and Technology for Aerospace Engineering:1-8[2022-11-05].DOI:10.13433/j.cnki.1003-8728.20220186. | |
| 15 | 韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995(1):85-88. |
| HAN J Q. The “extended state observer” of a class of uncertain systems[J]. Control and Decision, 1995(1):85-88. | |
| 16 | 徐海祥,李超逸,余文曌,等.基于扩张状态观测器的智能船舶循迹预测控制[J].华南理工大学学报(自然科学版),2021,49(12):143-152. |
| XU H Y, LI C Y, YU W Z, et al. Predictive control for intelligent ship path following based on extended state observer[J]. Journal of South China University of Technology(Natural Science Edition), 2021,49(12):143-152. | |
| 17 | COLE D J, PICK A J, ODHAMS A M C. Predictive and linear quadratic methods for potential application to modelling driver steering control[J]. Vehicle System Dynamics, 2006, 44(3): 259-284. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [4] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [5] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [6] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [7] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [8] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [9] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [10] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [11] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [12] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [13] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [14] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [15] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |