汽车工程 ›› 2022, Vol. 44 ›› Issue (7): 987-996.doi: 10.19562/j.chinasae.qcgc.2022.07.005
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
金立生1,2,贺阳1,王欢欢1,霍震1,谢宪毅1,郭柏苍1( )
)
收稿日期:2021-12-30
修回日期:2022-02-13
出版日期:2022-07-25
发布日期:2022-07-20
通讯作者:
郭柏苍
E-mail:guobaicang@ysu.edu.cn
基金资助:
Lisheng Jin1,2,Yang He1,Huanhuan Wang1,Zhen Huo1,Xianyi Xie1,Baicang Guo1()
Received:2021-12-30
Revised:2022-02-13
Online:2022-07-25
Published:2022-07-20
Contact:
Baicang Guo
E-mail:guobaicang@ysu.edu.cn
摘要:
针对路侧采集的激光雷达点云数据随距离增大而密度下降导致同一目标的点云被分割成多个目标的问题,提出了一种基于自适应阈值DBSCAN的路侧点云分割算法。首先,使用改进GPF和直通滤波对采集的路侧点云进行过滤,提取出道路区域上的非地面点云;然后,基于有效距离和sigmoid函数构建自适应系数函数,对DBSCAN聚类算法集群生长中近邻点搜索时半径阈值的选取规则进行优化;最后,利用自适应阈值DBSCAN聚类算法对非地面点进行聚类,得到隶属于单个目标的点云。采集了1 055帧真实场景的连续数据进行测试,结果显示:C-H系数平均约增加3倍、D-B系数平均减少4.52%、轮廓系数平均增加77.78%,这表明基于自适应阈值DBSCAN的分割算法能提高点云簇的类内一致性和类间差异性,有效减少路侧激光雷达点云的过分割现象,具有较高的工程应用价值。
金立生,贺阳,王欢欢,霍震,谢宪毅,郭柏苍. 基于自适应阈值DBSCAN的路侧点云分割算法[J]. 汽车工程, 2022, 44(7): 987-996.
Lisheng Jin,Yang He,Huanhuan Wang,Zhen Huo,Xianyi Xie,Baicang Guo. Point Cloud Segmentation Algorithm Based on Adaptive Threshold DBSCAN for Roadside LiDAR[J]. Automotive Engineering, 2022, 44(7): 987-996.

图1
直通滤波流程示意图"
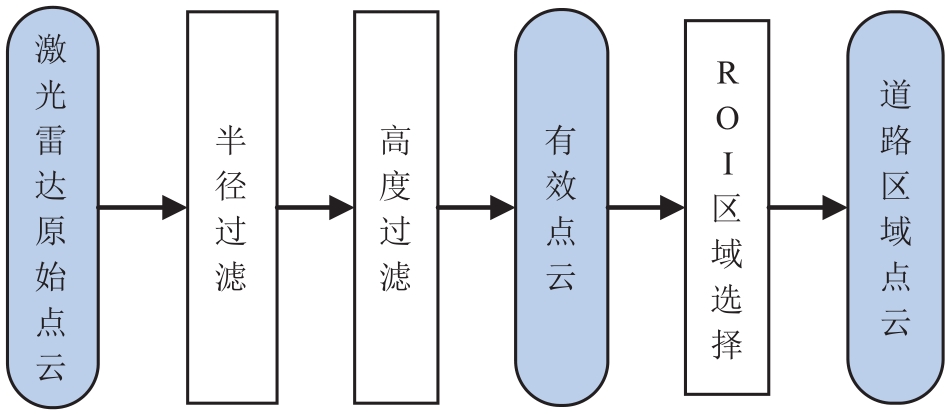
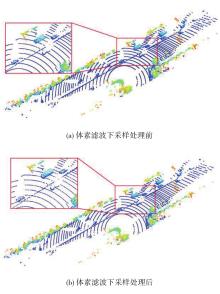
图2
体素滤波下采样"


图3
地面滤波"
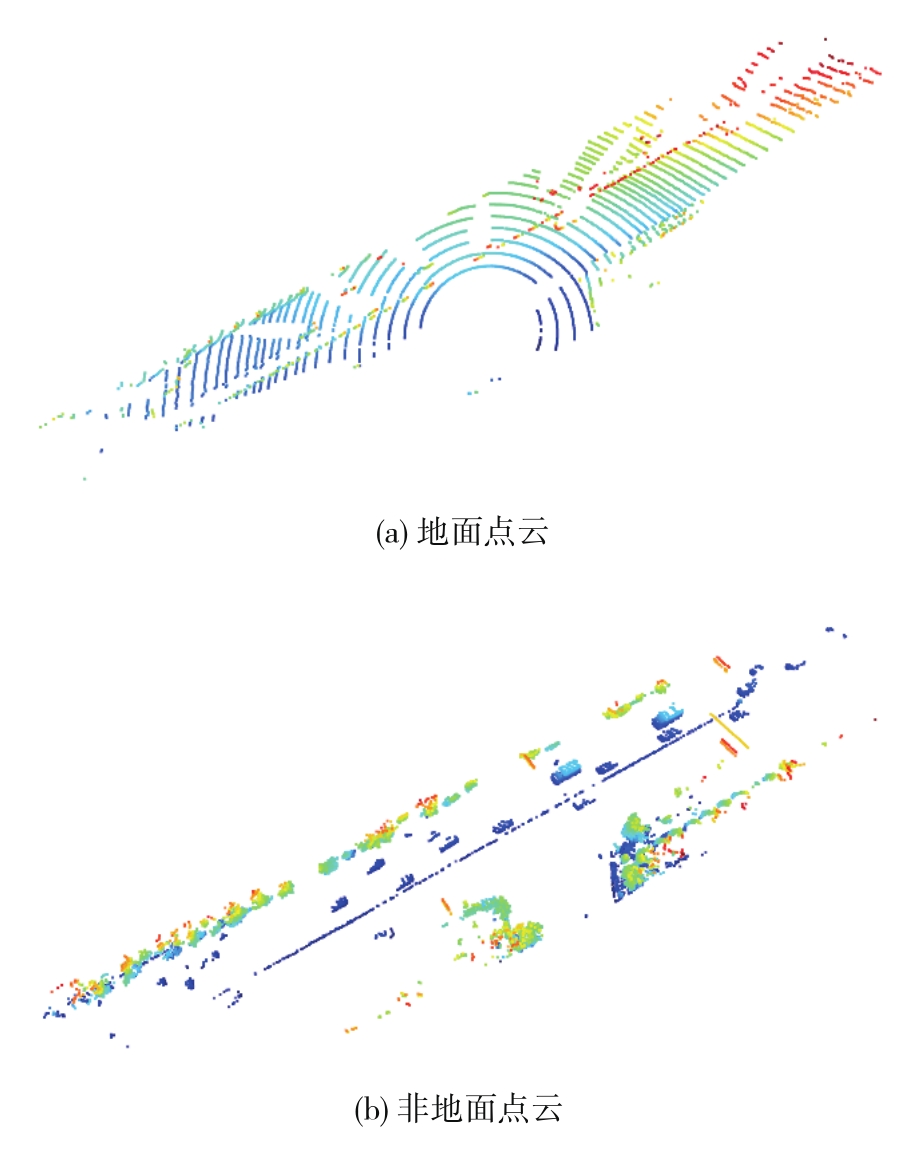
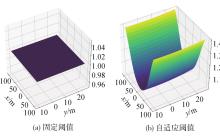
图4
阈值分布"


图5
路侧激光雷达数据采集平台"


图6
数据采集地点"

图7
路侧激光雷达数据"

表1
直通滤波参数设置"
| 参数 | ||||
|---|---|---|---|---|
| 数值 | 100 | 5 | -10 | 26 |
表2
地面滤波参数设置"
| 参数 | |||||
|---|---|---|---|---|---|
| 数值 | 20 | 0.3 | 20 | 1.2 | 4.5 |
表3
非地面点聚类参数设置"
| 参数 | |||
|---|---|---|---|
| 数值 | 0.8 | 5 | 1 055 |

图8
部分帧分割结果"

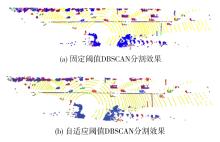
图9
聚类效果对比"
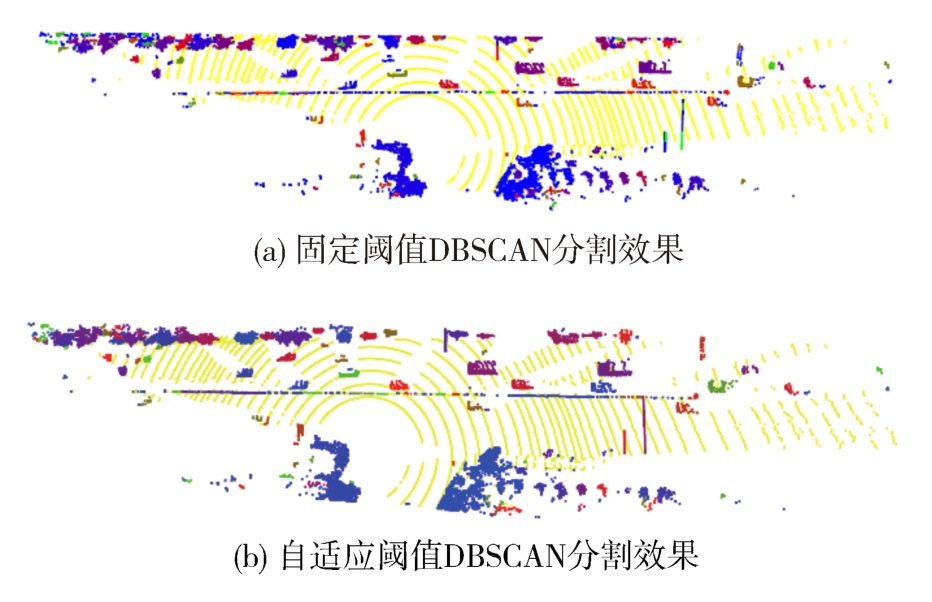

图10
聚类效果细节对比"
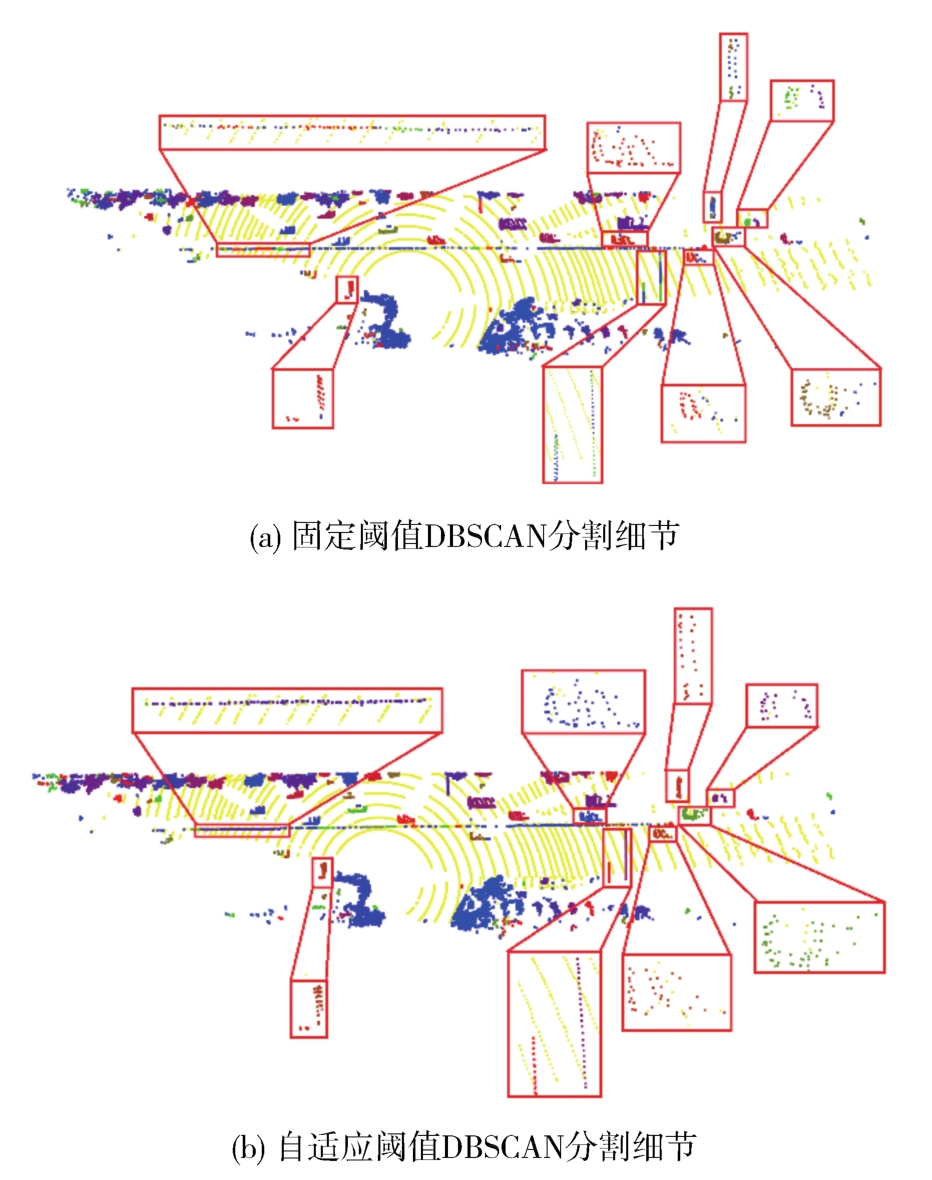
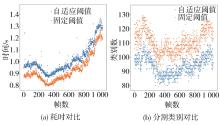
图11
算法耗时和类别数量"

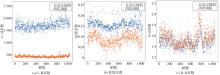
图12
聚类结果评价指标"

表4
算法对比"
| 指标 | 平均耗时/s | 类别均值 | |||
|---|---|---|---|---|---|
| 优化前 | 0.94 | 110.69 | 1.55 | 0.09 | 431.97 |
| 优化后 | 1.02 | 93.83 | 1.48 | 0.16 | 1 718.48 |
表5
不同算法对比"
| 指标 | 平均耗时/s | 类别均值 | |||
|---|---|---|---|---|---|
| 改进DBSCAN[ | 1.37 | 104.30 | 1.72 | 0.04 | 1 139.46 |
| LA-DBSCAN[ | 0.78 | 1 267.00 | 0.94 | -0.09 | 8.02 |
| 本文 | 1.02 | 93.83 | 1.48 | 0.16 | 1 718.48 |
| 1 | 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12):1595-1605. |
| LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12):1595-1605. | |
| 2 | 李克强, 戴一凡, 李升波,等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1):1-14. |
| LI K Q, DAI Y F, LI S B, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1):1-14. | |
| 3 | 李克强. 智能网联汽车的发展现状与对策建议[J]. 机器人产业, 2020(6):28-35. |
| LI K Q. Development status and countermeasures of intelligent connected vehicles[J]. Robot Industry, 2020(6):28-35. | |
| 4 | 赵佳琦, 周勇, 何欣, 等. 基于深度学习的点云分割研究进展分析[J/OL]. 电子与信息学报: 1-15[2021-12-23].http://kns.cnki.net/kcms/detail/11.4494.tn.20211213.1522.006.html. |
| ZHAO J Q, ZHOU Y, HE X, et al. Research progress analysis of point cloud segmentation based on deep learning[J/OL]. Journal of Electronics & Information Technology: 1-15[2021-12-23].http://kns.cnki.net/kcms/detail/11.4494.tn.20211213.1522.006.html. | |
| 5 | 王子洋, 李琼琼, 张子蕴, 等. 应用于无人驾驶车辆的点云聚类算法研究进展[J]. 世界科技研究与发展, 2021, 43(3):274-285. |
| WANG Z Y, LI Q Q, ZHANG Z Y, et al. Research progress of unmanned vehicle point cloud clustering algorithm[J]. World Sci-Tech R & D, 2021, 43(3):274-285. | |
| 6 | 李娇娇, 孙红岩, 董雨, 等. 基于深度学习的3D点云处理综述[J/OL]. 计算机研究与发展: 1-24[2021-12-19].http://kns.cnki.net/kcms/detail/11.1777.TP.20210825.1539.005.html. |
| LI J J, SUN H Y, DONG Y, et al. A survey of 3D point cloud processing based on deep learning[J/OL]. Journal of Computer Research and Development: 1-24[2021-12-19].http://kns.cnki.net/kcms/detail/11.1777.TP.20210825.1539.005.html. | |
| 7 | QI C R, YI L, SU H, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[J]. arXiv preprint arXiv:, 2017. |
| 8 | CHENG S, CHEN X, HE X, et al. PRA-Net: point relation-aware network for 3D point cloud analysis[J]. IEEE Transactions on Image Processing, 2021, 30: 4436-4448. |
| 9 | HU Q, YANG B, XIE L, et al. Randla-net: efficient semantic segmentation of large-scale point clouds[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020. |
| 10 | 范晶晶, 王力, 褚文博,等. 基于KDTree树和欧式聚类的越野环境下行人识别的研究[J]. 汽车工程, 2019, 41(12). |
| FAN J J, WANG L, CHU W B, et al. Research on pedestrian recognition in cross-country environment based on kdtree and euclidean clustering[J]. Automotive Engineering, 2019, 41(12). | |
| 11 | ESTER M, KRIEGEL H P, SANDER J, et al. A density-based algorithm for discovering clusters in large spatial databases with noise[C]. AAAI Press, 1996. |
| 12 | ANKERST M, BREUNIG M M, KRIEGEL H P, et al. OPTICS: ordering points to identify the clustering structure[J]. ACM Sigmod record, 1999, 28(2): 49-60. |
| 13 | CHEN Y, ZHOU L, BOUGUILA N, et al. BLOCK-DBSCAN: fast clustering for large scale data[J]. Pattern Recognition, 2021, 109: 107624. |
| 14 | CHEN Y, ZHOU L, PEI S, et al. KNN-BLOCK DBSCAN: fast clustering for large-scale data[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019. |
| 15 | ZHANG Z, ZHENG J, XU H, et al. Automatic background construction and object detection based on roadside LiDAR[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(10): 4086-4097. |
| 16 | LIN C, GUO Y, LI W, et al. An automatic lane marking detection method with low-density roadside LiDAR data[J]. IEEE Sensors Journal, 2021, 21(8): 10029-10038. |
| 17 | 谢德胜, 徐友春, 王任栋, 等. 基于三维激光雷达的无人车障碍物检测与跟踪[J]. 汽车工程, 2018, 40(8):952-959. |
| XIE D S, XU Y C, WANG R D, et al. Obstacle detection and tracking for unmanned vehicles based on 3D laser radar[J]. Automotive Engineering, 2018, 40(8):952-959. | |
| 18 | ZERMAS D, IZZAT I, PAPANIKOLOPOULOS N. Fast segmentation of 3d point clouds: a paradigm on lidar data for autonomous vehicle applications[C]. 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017. |
| 19 | 刘明. 支持向量机中Sigmoid核函数的研究[D]. 西安:西安电子科技大学, 2009. |
| LIU M. The study on Sigmoid kernel function in support vector machine[D]. Xi’an: Xidian University, 2009. | |
| 20 | GOLDBERGER J, HINTON G E, ROWEIS S, et al. Neighbourhood components analysis[J]. Advances in Neural Information Processing Systems, 2004, 17. |
| 21 | PEDREGOSA F, VAROQUAUX G, GRAMFORT A, et al. Scikit-learn: machine learning in Python[J]. The Journal of Machine Learning Research, 2011, 12: 2825-2830. |
| 22 | CALIŃSKI T, HARABASZ J. A dendrite method for cluster analysis[J]. Communications in Statistics-theory and Methods, 1974, 3(1): 1-27. |
| 23 | ROUSSEEUW P J. Silhouettes: a graphical aid to the interpretation and validation of cluster analysis[J]. Journal of Computational and Applied Mathematics, 1987, 20: 53-65. |
| 24 | DAVIES D L, BOULDIN D W. A cluster separation measure[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1979 (2): 224-227. |
| 25 | HALKIDI M, BATISTAKIS Y, VAZIRGIANNIS M. On clustering validation techniques[J]. Journal of Intelligent Information Systems, 2001, 17(2): 107-145. |
| 26 | 薛培林,吴愿,殷国栋,等.基于信息融合的城市自主车辆实时目标识别[J].机械工程学报, 2020,56(12):165-173. |
| XUE P L, WU Y, YIN G D, et al. Real-time target recognition for urban autonomous vehicles based on information fusion[J]. Journal of Mechanical Engineering, 2020,56(12):165-173. | |
| 27 | PILEHFOROOSHHA P, KARIMI M. A local adaptive density-based algorithm for clustering polygonal buildings in urban block polygons[J]. Geocarto International, 2020, 35(2): 141-167. |
| 28 | 张名芳, 刘新雨, 付锐,等. 一种用于道路障碍物识别的激光点云聚类算法[J]. 激光与红外, 2017, 47(9):7. |
| ZHANG M F, LIU X Y, FU R, et al. Clustering algorithm of laser point cloud for road barriers detection[J]. Laser & Infrared, 2017, 47(9):7. | |
| 29 | XIE N, MIAO Z, WANG J, et al. Adaptive DBSCAN algorithm based on sample density gradient[C]. Journal of Physics: Conference Series. IOP Publishing, 2019. |
| 30 | ZHANG R, DU T, QU S, et al. Adaptive density-based clustering algorithm with shared KNN conflict game[J]. Information Sciences, 2021, 565: 344-369. |
| 31 | 张凯, 于春磊, 赵亚丽, 等. 基于自适应阈值的三维激光点云地面分割算法研究[J]. 汽车工程, 2021, 43(7):1005-1012. |
| ZHANG K, YU C L, ZHAO Y L, et al. Research on ground segmentation algorithm based on adaptive thresholds for 3D laser point clouds[J]. Automotive Engineering, 2021, 43(7):1005-1012. |
| [1] | 程腾,倪昊,张强,王文冲,石琴. 基于虚拟点云的二阶段多模态融合网络[J]. 汽车工程, 2024, 46(2): 222-229. |
| [2] | 马雷, 杨顺清, 王欢欢, 翟家琛, 徐健傲. 融合图像显著性特征的轻量级目标检测算法[J]. 汽车工程, 2024, 46(1): 84-91. |
| [3] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [4] | 韩勇,林旭洁,黄红武,蔡鸿瑜,罗金镕,李燕婷. 典型汽车碰撞事故场景中行人运动轨迹预测方法[J]. 汽车工程, 2023, 45(6): 1022-1030. |
| [5] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
| [6] | 陈妍妍,王海,蔡英凤,陈龙,李祎承. 基于检测的高效自动驾驶实例分割方法[J]. 汽车工程, 2023, 45(4): 541-550. |
| [7] | 李亚鹏,唐小林,胡晓松. 基于分层式控制的混合动力汽车生态驾驶研究[J]. 汽车工程, 2023, 45(4): 551-560. |
| [8] | 胡满江,牟斌杰,杨泽宇,边有钢,秦晓辉,徐彪. 基于DBSCAN与二分法的混合A*路径规划方法[J]. 汽车工程, 2023, 45(3): 341-349. |
| [9] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [10] | 胡杰,徐博远,熊宗权,昌敏杰,郭迪,谢礼浩. 基于多尺度掩码分类域自适应网络的跨域目标检测算法[J]. 汽车工程, 2022, 44(9): 1327-1338. |
| [11] | 谢德胜,徐友春,陆峰,潘世举. 基于多传感器信息融合的3维目标实时检测[J]. 汽车工程, 2022, 44(3): 340-349. |
| [12] | 刘子龙,沈祥飞. 融合Lite-HRNet的Yolo v5双模态自动驾驶小目标检测方法[J]. 汽车工程, 2022, 44(10): 1511-1520. |
| [13] | 张炳力,秦浩然,江尚,郑杰禹,吴正海. 基于RetinaNet及优化损失函数的夜间车辆检测方法[J]. 汽车工程, 2021, 43(8): 1195-1202. |
| [14] | 程腾,孙磊,侯登超,石琴,张峻宁,陈炯,黄鹤. 基于特征融合的多层次多模态目标检测[J]. 汽车工程, 2021, 43(11): 1602-1610. |
| [15] | 边辰通, 殷国栋, 徐利伟, 张宁, 朱侗. 无人驾驶汽车编队雾天主动拯救系统*[J]. 汽车工程, 2020, 42(1): 20-26. |
|