汽车工程 ›› 2021, Vol. 43 ›› Issue (3): 305-312.doi: 10.19562/j.chinasae.qcgc.2021.03.001
• • 下一篇
王军年1,刘鹏1,杨钫2,靳立强1,付铁军1( )
)
Junnian Wang1,Peng Liu1,Fang Yang2,Liqiang Jin1,Tiejun Fu1()
摘要:
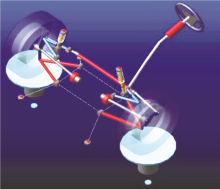
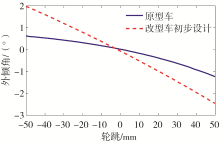
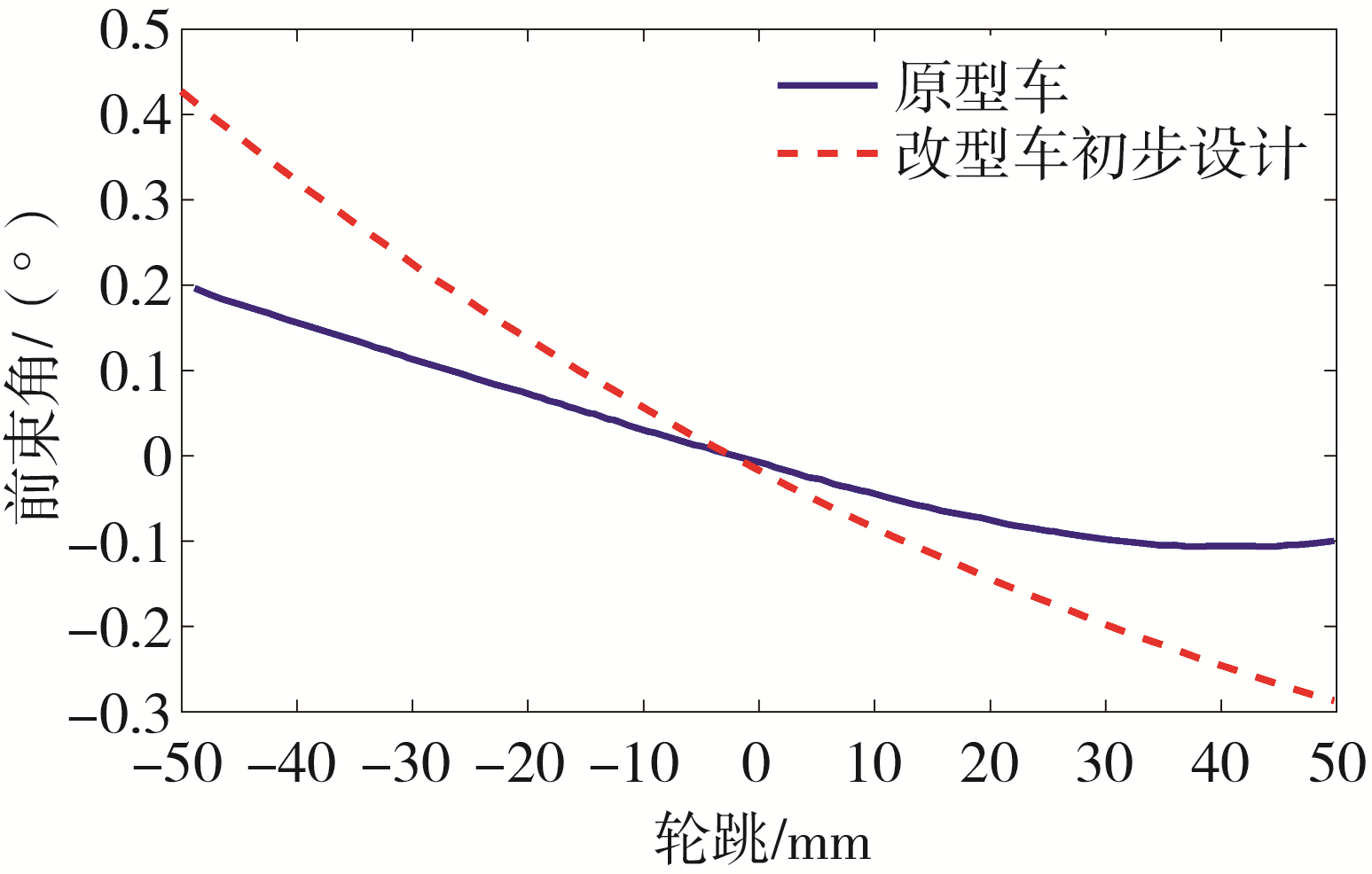
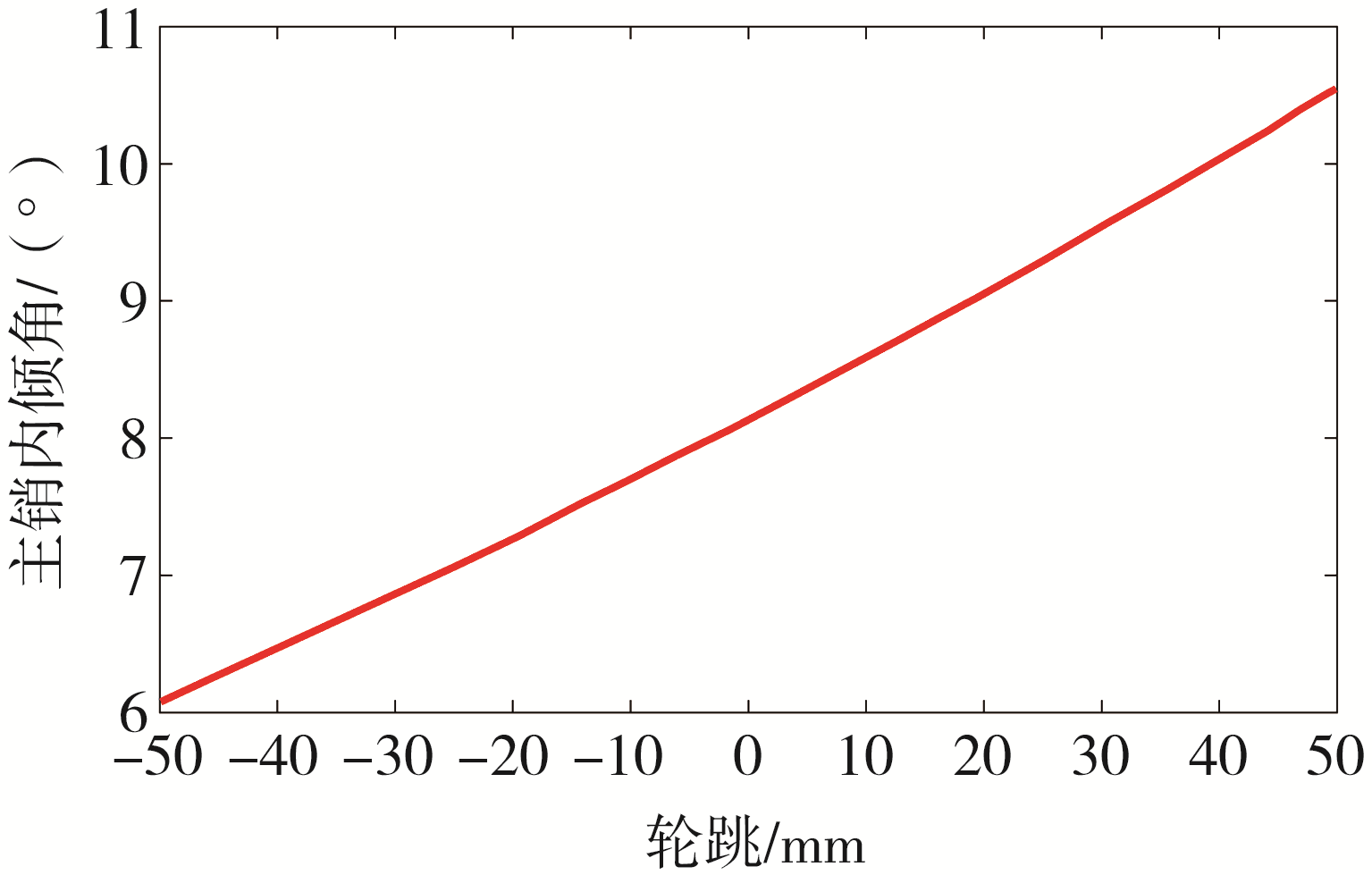
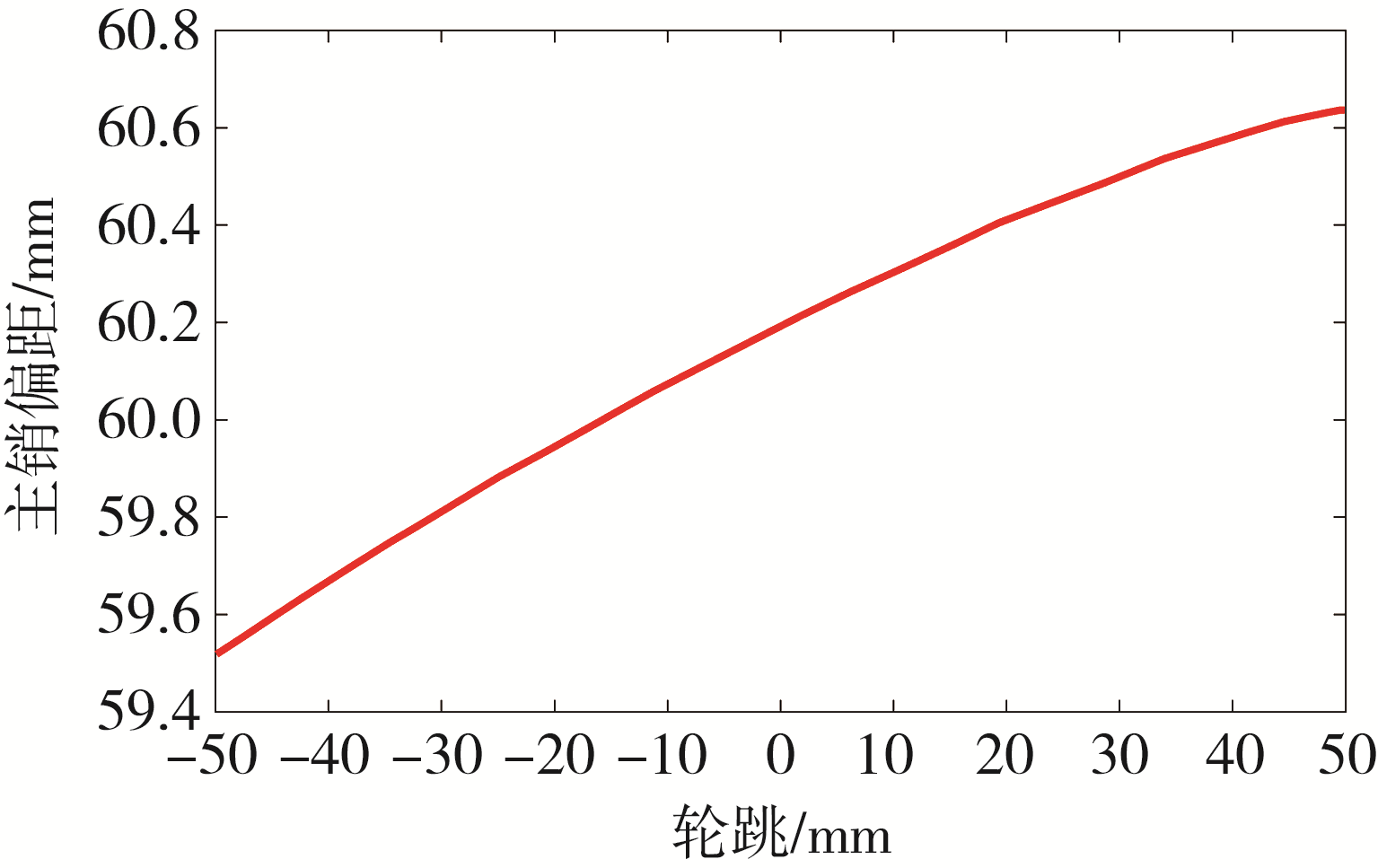
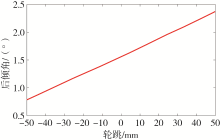
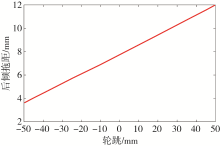
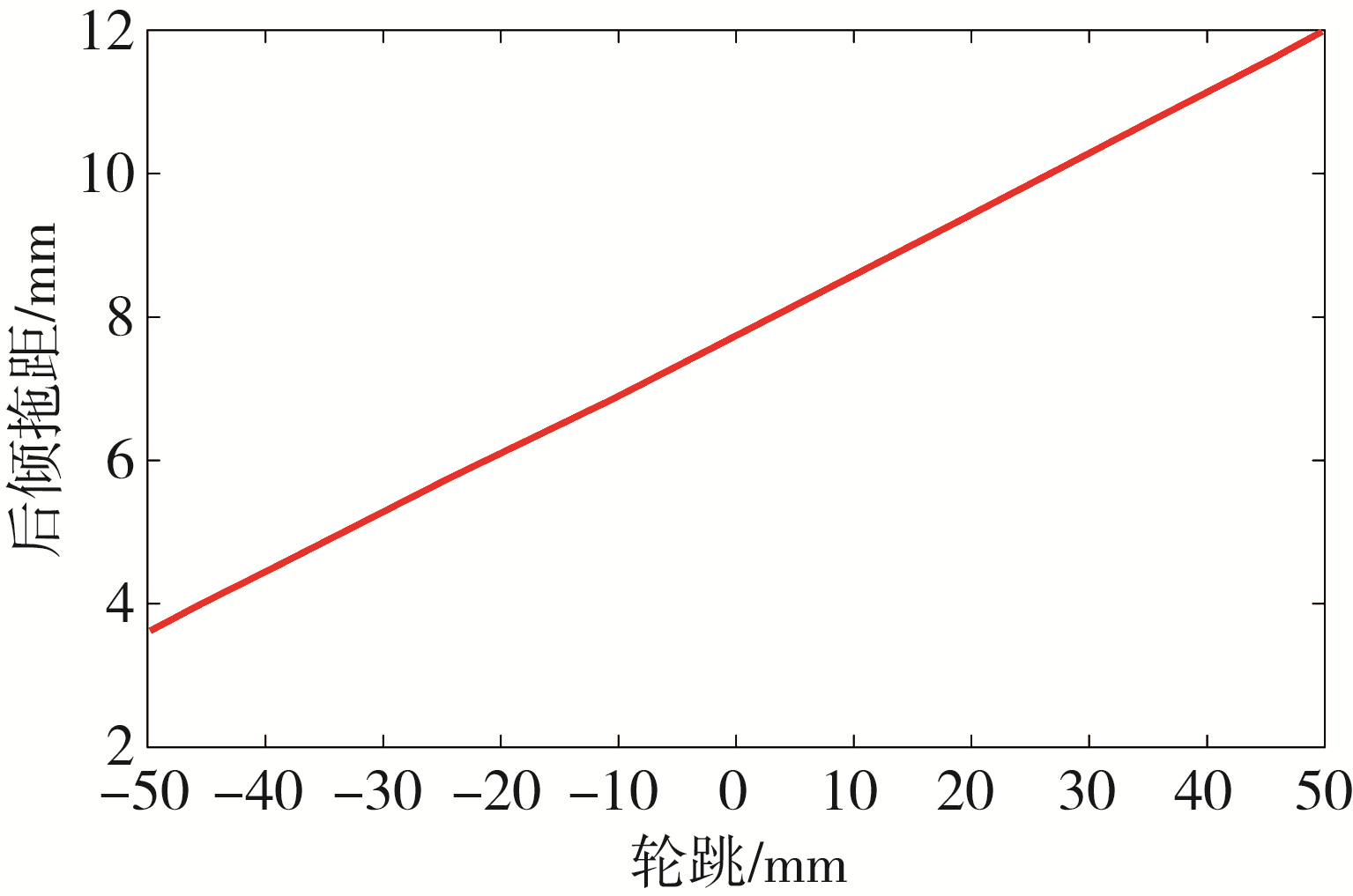
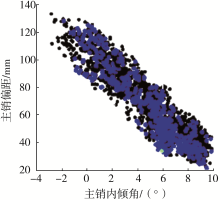
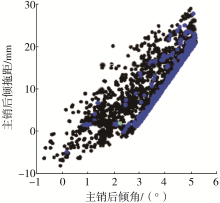
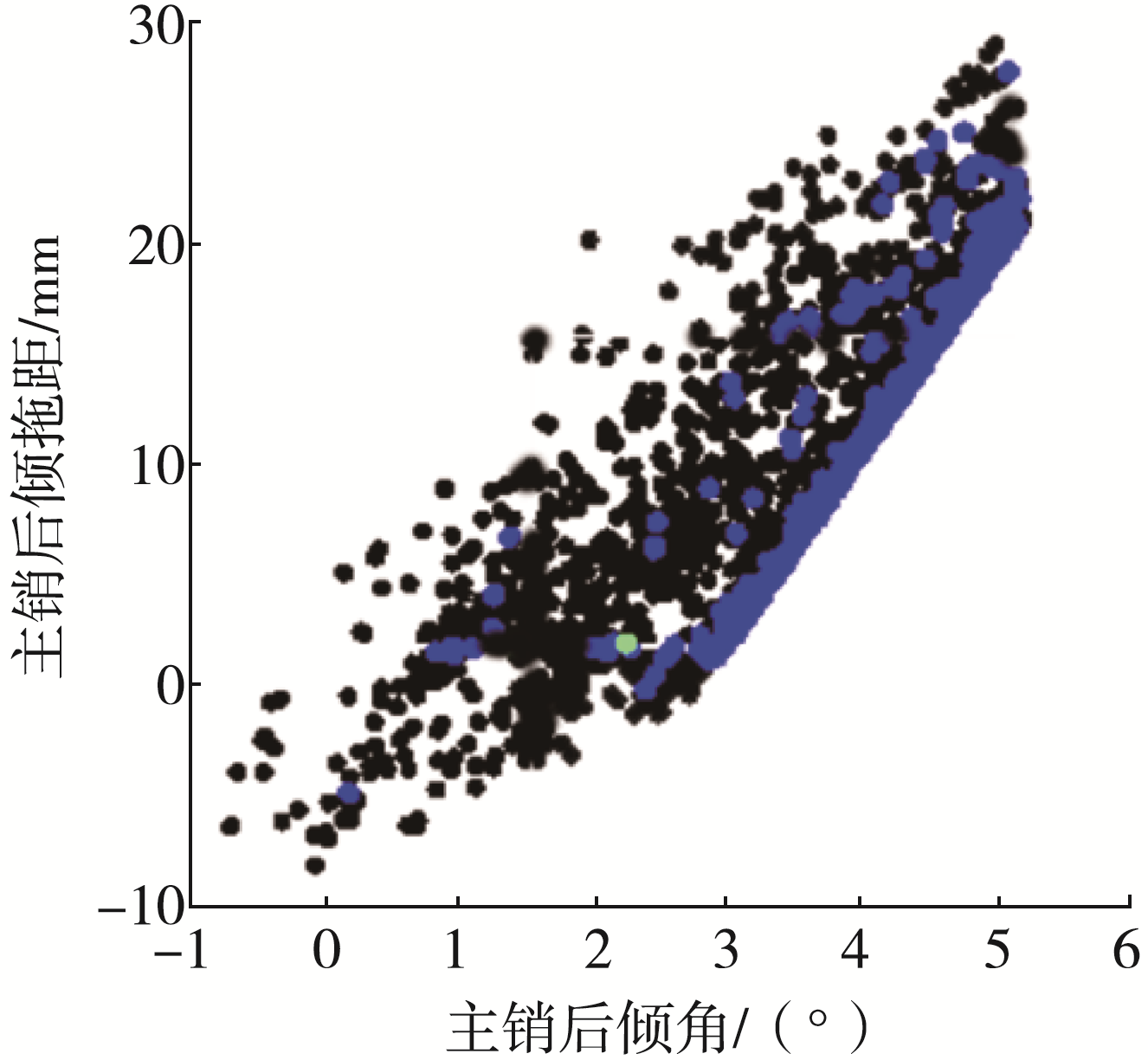
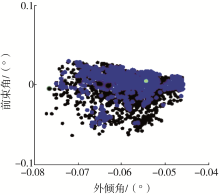
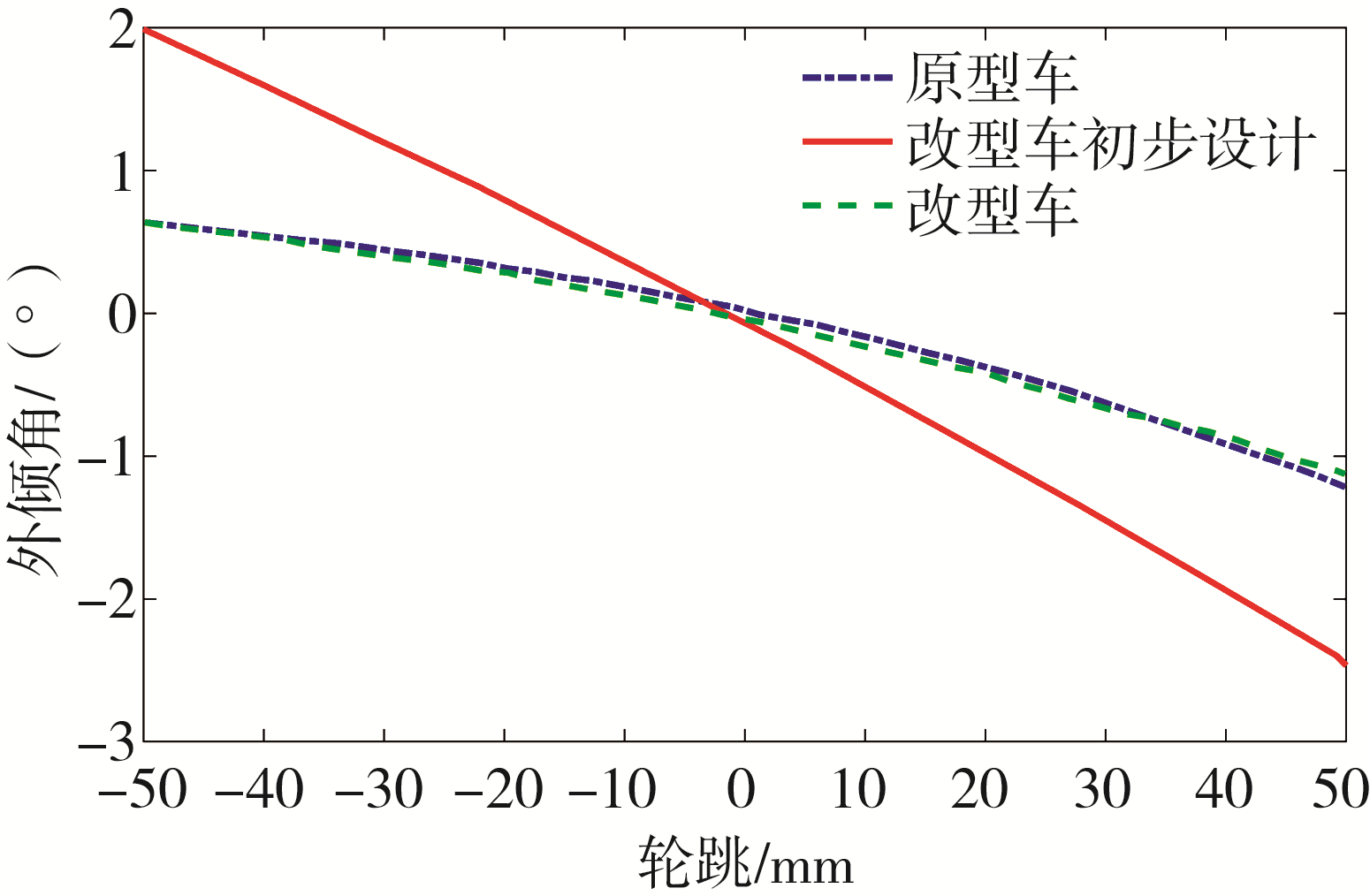
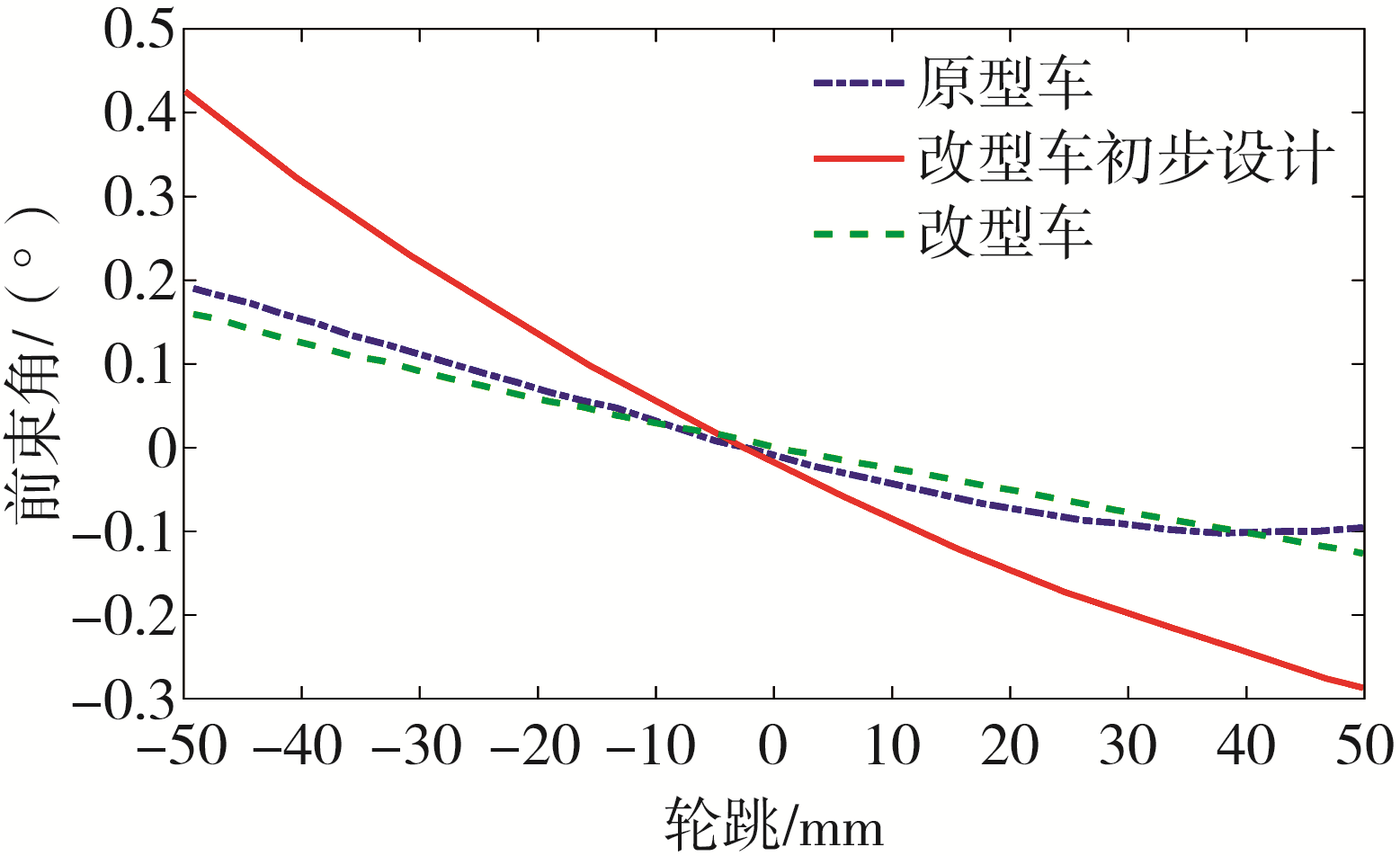
基于传统汽车底盘平台进行电动轮驱动改型时,轮毂电机的布置将导致悬架硬点坐标的改变,从而严重影响悬架运动学特性,为此须对电动轮驱动改型车悬架系统进行优化设计。以某传统车底盘平台的双横臂前悬架运动学特性为优化目标,根据参数灵敏度分析结果,提出两步优化方案,即首先进行主销定位参数的优化,而后再进行前轮外倾角和前轮前束角的优化。利用ISIGHT软件和全局非归一化的多目标遗传优化算法NSGA?II得到的悬架参数优化解集在ADAMS/Car平台下进行了验证。结果表明,悬架运动学特性得到较大幅度的改善,特性曲线与原型车悬架K特性实验结果基本一致。证明了该优化方法的可行性,确保了改型后电动汽车的操纵稳定性受安放轮毂电机的影响较小。