汽车工程 ›› 2024, Vol. 46 ›› Issue (3): 383-395.doi: 10.19562/j.chinasae.qcgc.2024.03.002
• • 上一篇
吴晓建1,2( ),廖平伟1,4,雷耀2,江会华2,王爱春2,胡家琦3
),廖平伟1,4,雷耀2,江会华2,王爱春2,胡家琦3
收稿日期:2023-07-09
修回日期:2023-09-08
出版日期:2024-03-25
发布日期:2024-03-18
通讯作者:
吴晓建
E-mail:saintwu520@163.com
基金资助:
Xiaojian Wu1,2(),Pingwei Liao1,4,Yao Lei2,Huihua Jiang2,Aichun Wang2,Jiaqi Hu3
Received:2023-07-09
Revised:2023-09-08
Online:2024-03-25
Published:2024-03-18
Contact:
Xiaojian Wu
E-mail:saintwu520@163.com
摘要:
智能车在动态环境中的轨迹规划须具备良好的舒适性及安全性,离散采样轨迹规划算法具有实时性高、多目标最优等优点而被广泛研究和应用,但在仿真及实车测试中发现,典型的基于多项式优化求解的离散采样局部轨迹规划结果在换道等瞬态过程存在一致性较差的问题。本文针对性提出一种考虑一致性评价的“拼接+强规划”轨迹规划算法。具体而言,根据自车状态截取历史轨迹为当前周期拼接轨迹,结合拼接轨迹和轨迹末状态采样点生成基于多项式的候选轨迹簇作为轨迹强规划阶段,再基于轨迹横向偏差设计轨迹一致性评价函数以从轨迹簇中选取较高一致性的最优行驶轨迹。经仿真和真实道路场景实车验证,表明所提出的轨迹规划方法在满足轨迹安全性、平顺性、舒适性要求的基础上提高了智能驾驶车辆行驶轨迹的整体一致性。
吴晓建,廖平伟,雷耀,江会华,王爱春,胡家琦. 面向结构化道路的智能驾驶轨迹规划一致性研究[J]. 汽车工程, 2024, 46(3): 383-395.
Xiaojian Wu,Pingwei Liao,Yao Lei,Huihua Jiang,Aichun Wang,Jiaqi Hu. Research on Consistency of Intelligent Driving Trajectory Planning for Structured Road[J]. Automotive Engineering, 2024, 46(3): 383-395.

图1
轨迹规划流程"
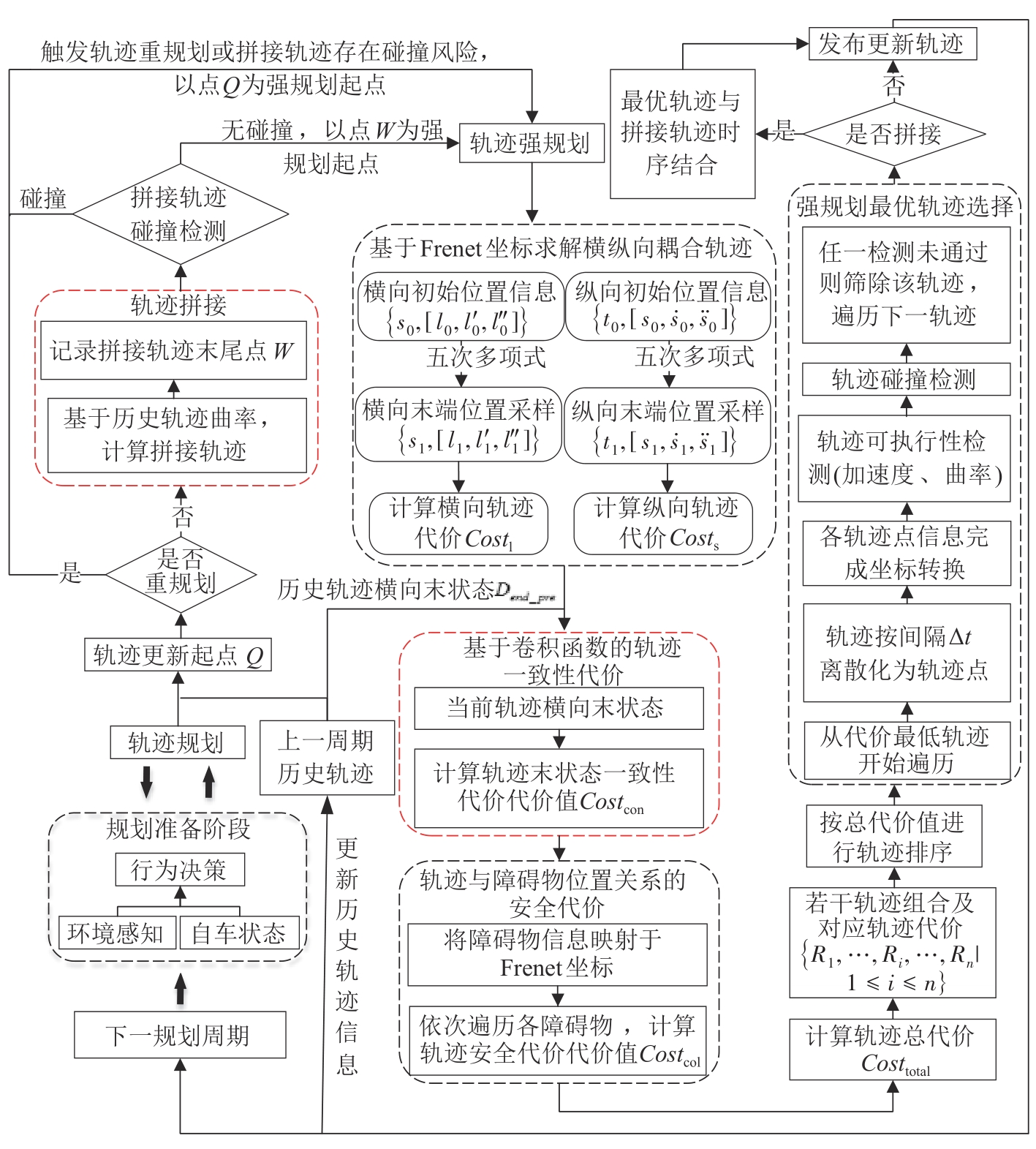
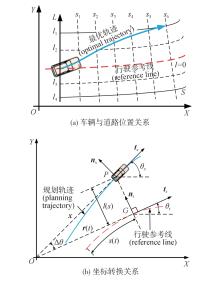
图2
Frenet坐标系与笛卡尔坐标系的车辆运动状态"
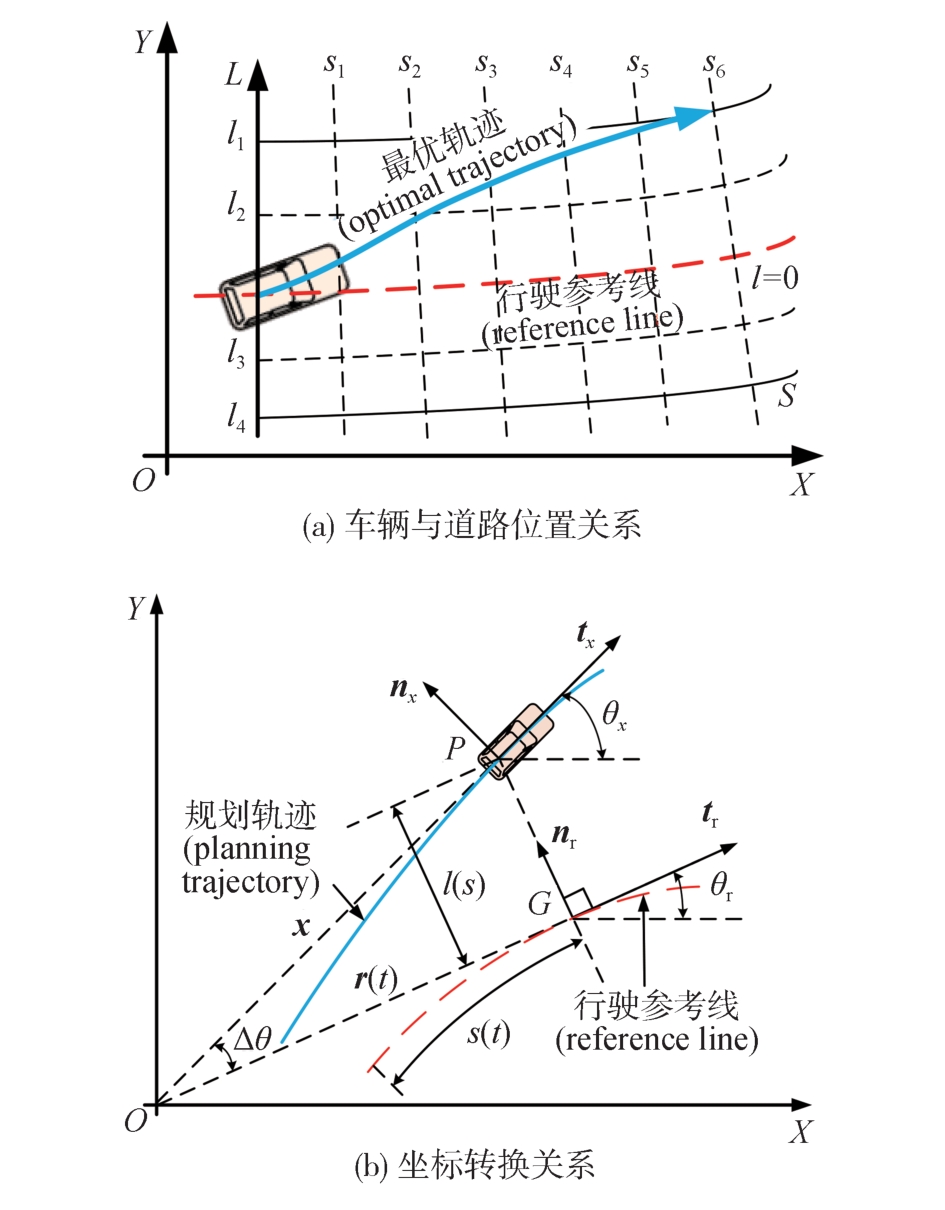
图3
换道避障场景"
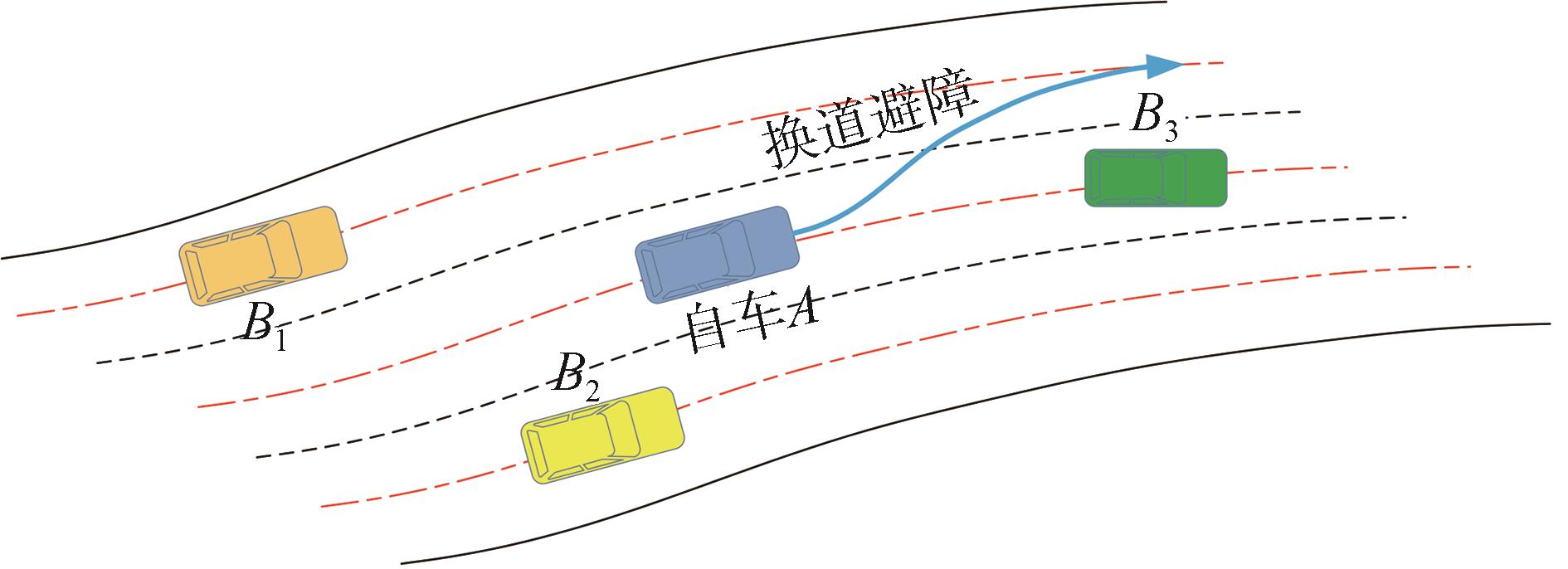
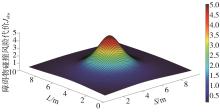
图4
Frenet坐标下轨迹碰撞风险代价示意图"
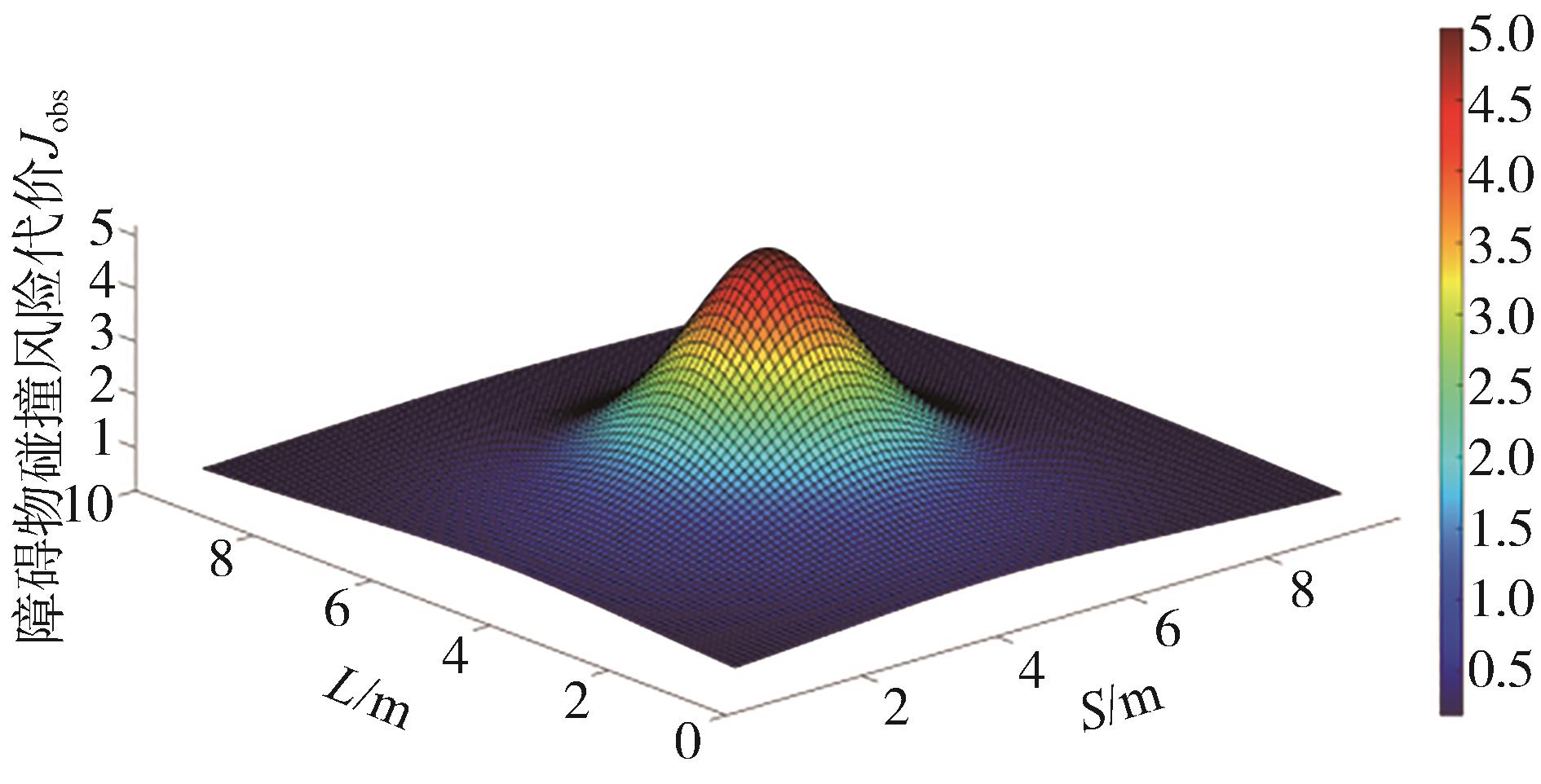

图5
Frenet坐标下候选轨迹碰撞风险计算范围"
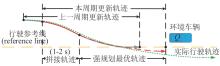
图6
轨迹更新策略"
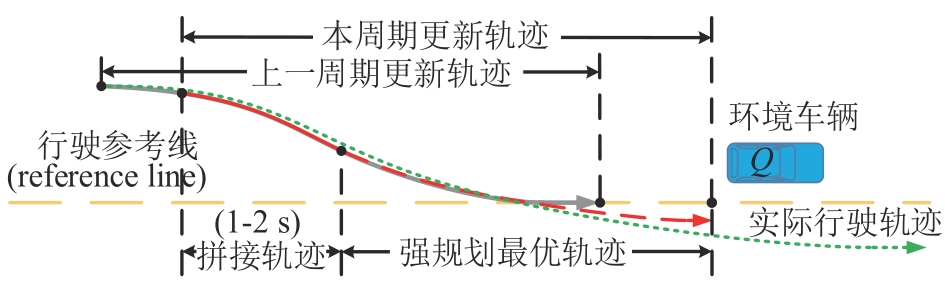
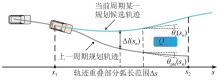
图7
基于重叠轨迹弧长的相邻周期轨迹一致性计算"
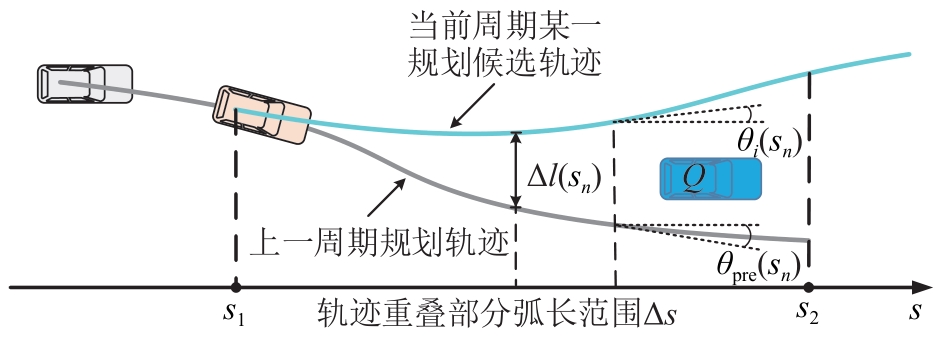
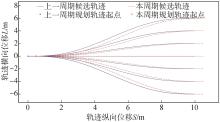
图8
Frenet坐标系下相邻周期规划候选轨迹行驶状态对比"
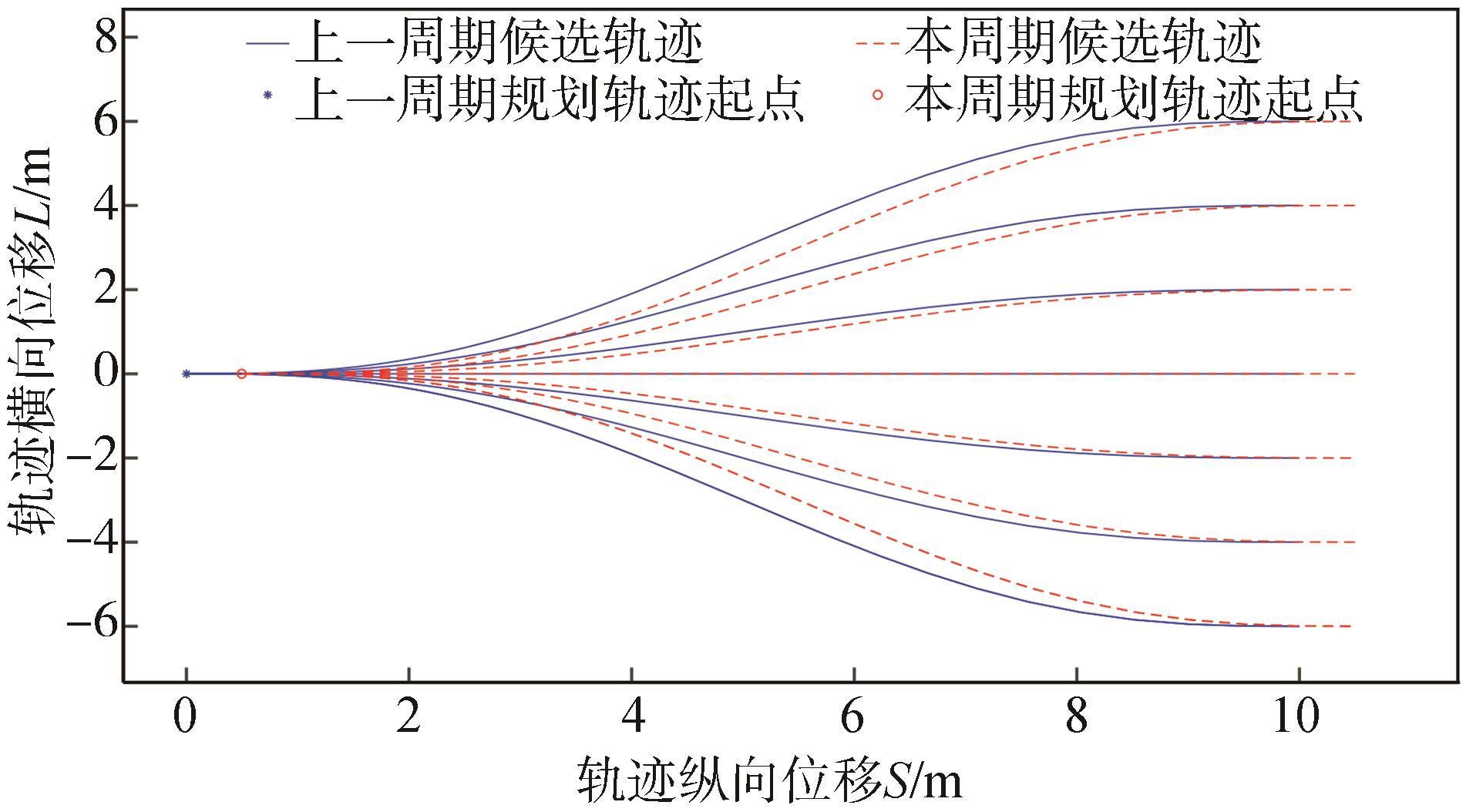

图9
基于卷积函数的强规划候选轨迹一致性代价示意图"
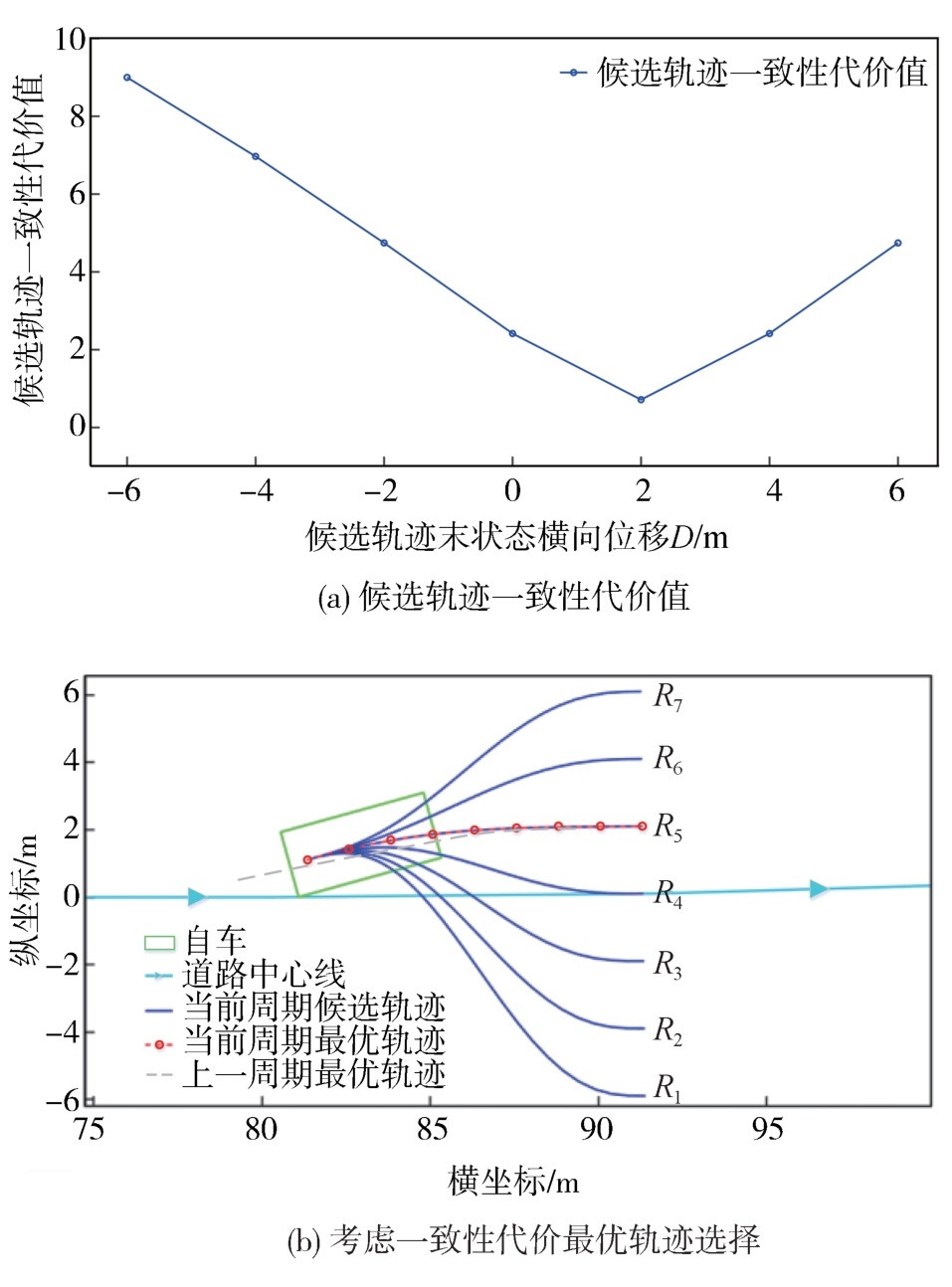
表1
候选轨迹末状态横向偏移及一致性真值"
| 变量符号/单位 | 变量名称 | 数值 | ||||||
|---|---|---|---|---|---|---|---|---|
| i | 轨迹Ri 序列值 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Dend_now/m | 候选轨迹末状态 横向位移 | -6 | -4 | -2 | 0 | 2 | 4 | 6 |
| Pcon | 轨迹一致性真值 | 0 | 0 | 0 | 1 | 1 | 1 | 0 |
表2
仿真参数设置"
| 变量符号/单位 | 变量名称 | 数值 |
|---|---|---|
| rego/m | 车辆碰撞半径 | 1.2 |
| rob/m | 障碍物碰撞半径 | 1.2/1.5 |
| lw/m | 道路宽度 | 3.75 |
| Δl/m | 横向道路宽度采样间隔 | 0.468 8 |
| amax/(m·s-2) | 最大加速度 | 5 |
| kappamax/m-1 | 最大曲率 | 0.5 |
| Ttotal/s | 轨迹时长 | 4 |
| ΔT/s | 轨迹点时间离散间隔 | 0.1 |
| Tplanning/s | 轨迹规划周期 | 0.5 |
| Nv_target | 目标纵向速度采样数量 | 1 |
| Tprediction/s | 障碍物预测轨迹时长 | 6 |

图10
仿真道路及设置障碍物"
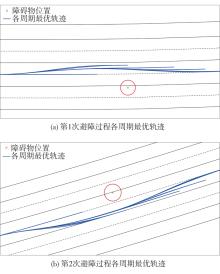
图11
仅添加碰撞风险代价后部分路段最优轨迹"
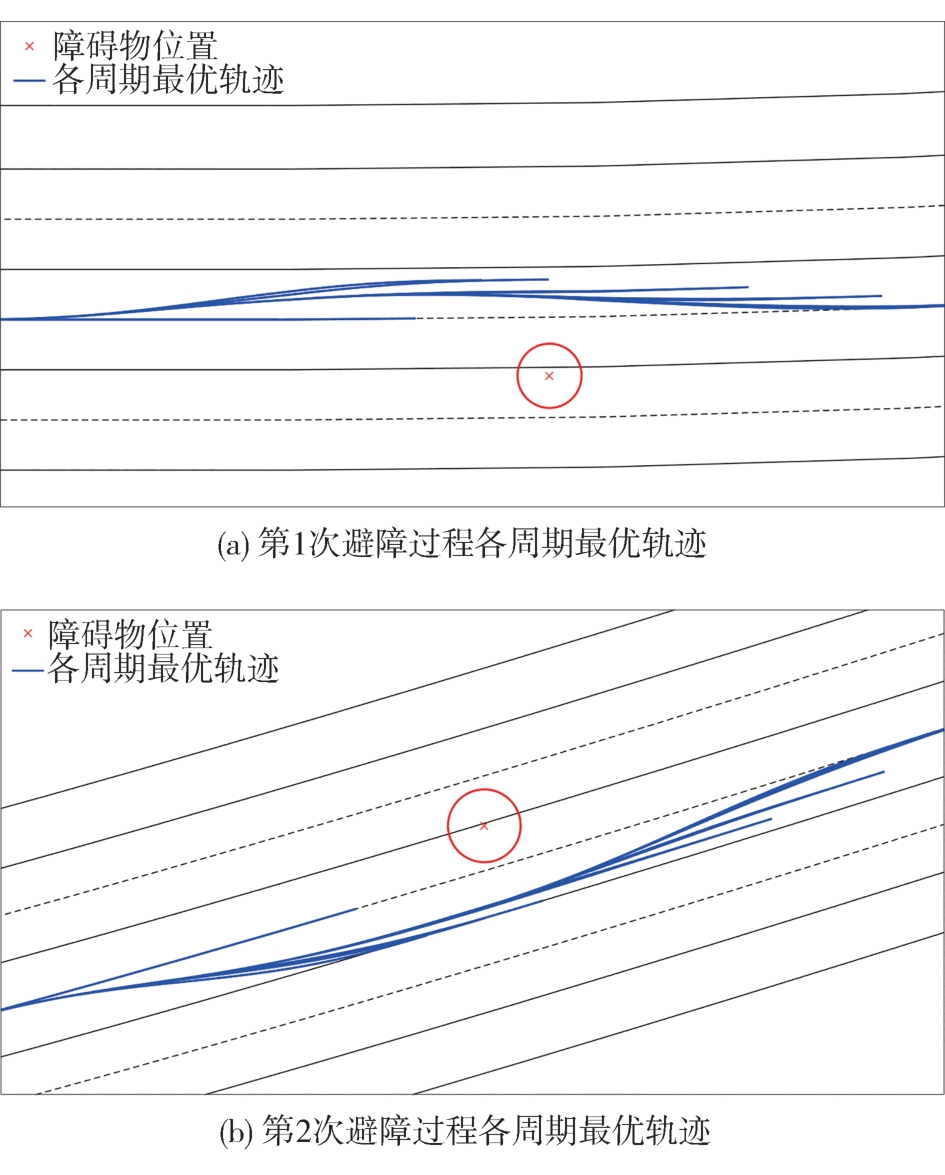
图12
同时添加碰撞风险及一致性代价后行驶轨迹状态"

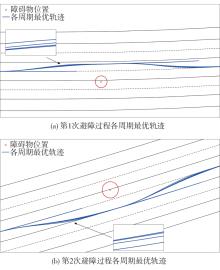
图13
同时添加碰撞风险代价及一致性代价后部分路段各周期最优轨迹"
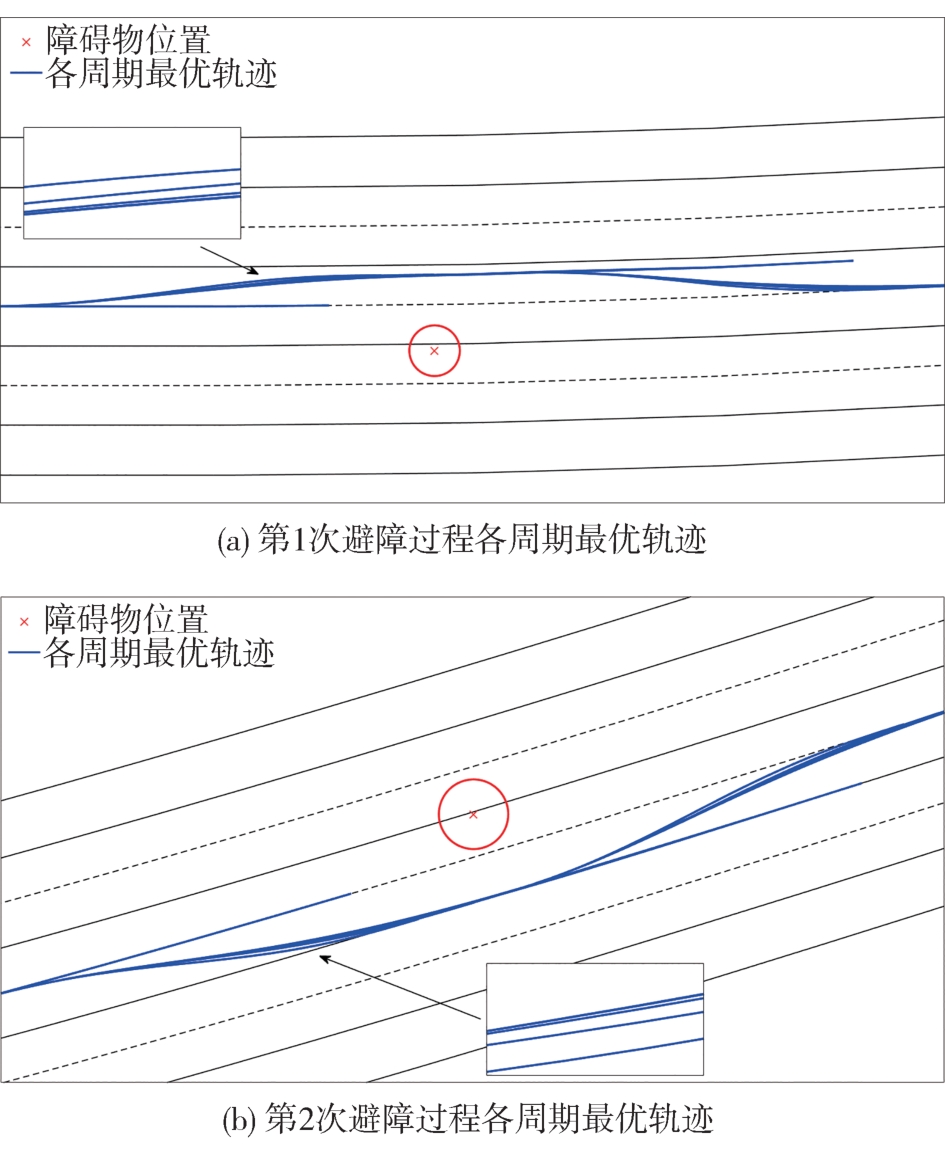

图14
第1次避障过程候选轨迹代价值状态"
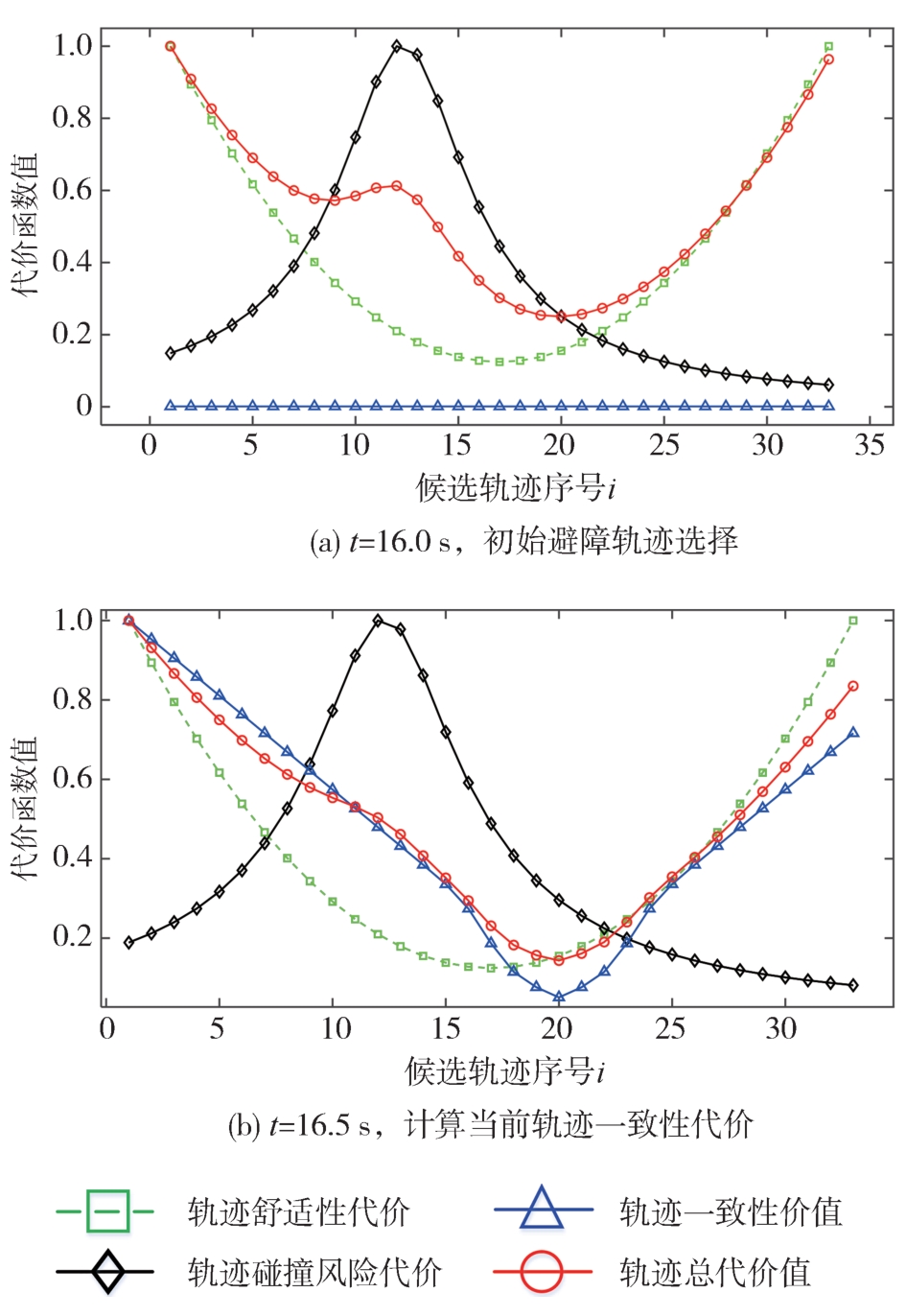
图15
添加轨迹拼接后部分路段车辆行驶轨迹状态"

图16
添加碰撞风险代价、一致性代价及轨迹拼接后,部分路段各周期最优轨迹"
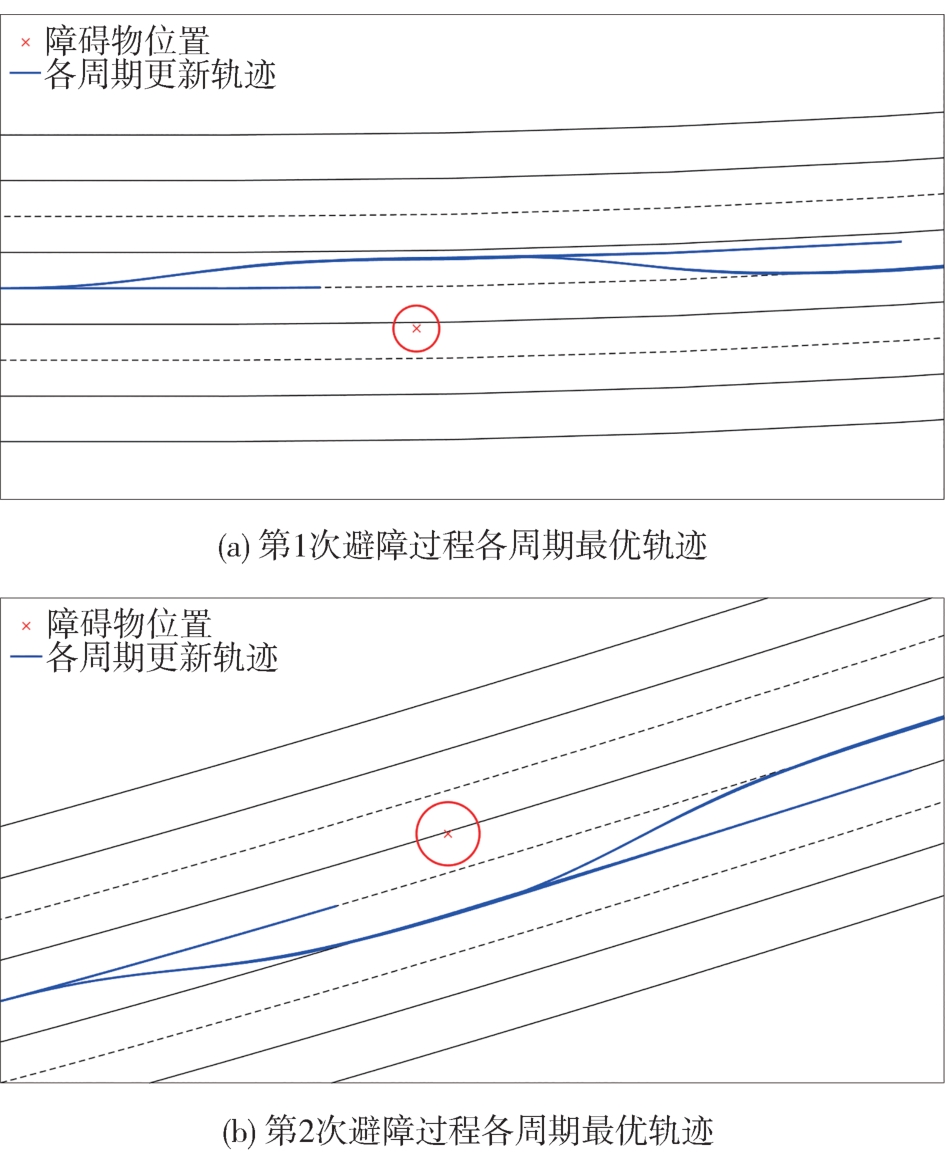
图17
原有规划模型的部分路段动态障碍物避障"
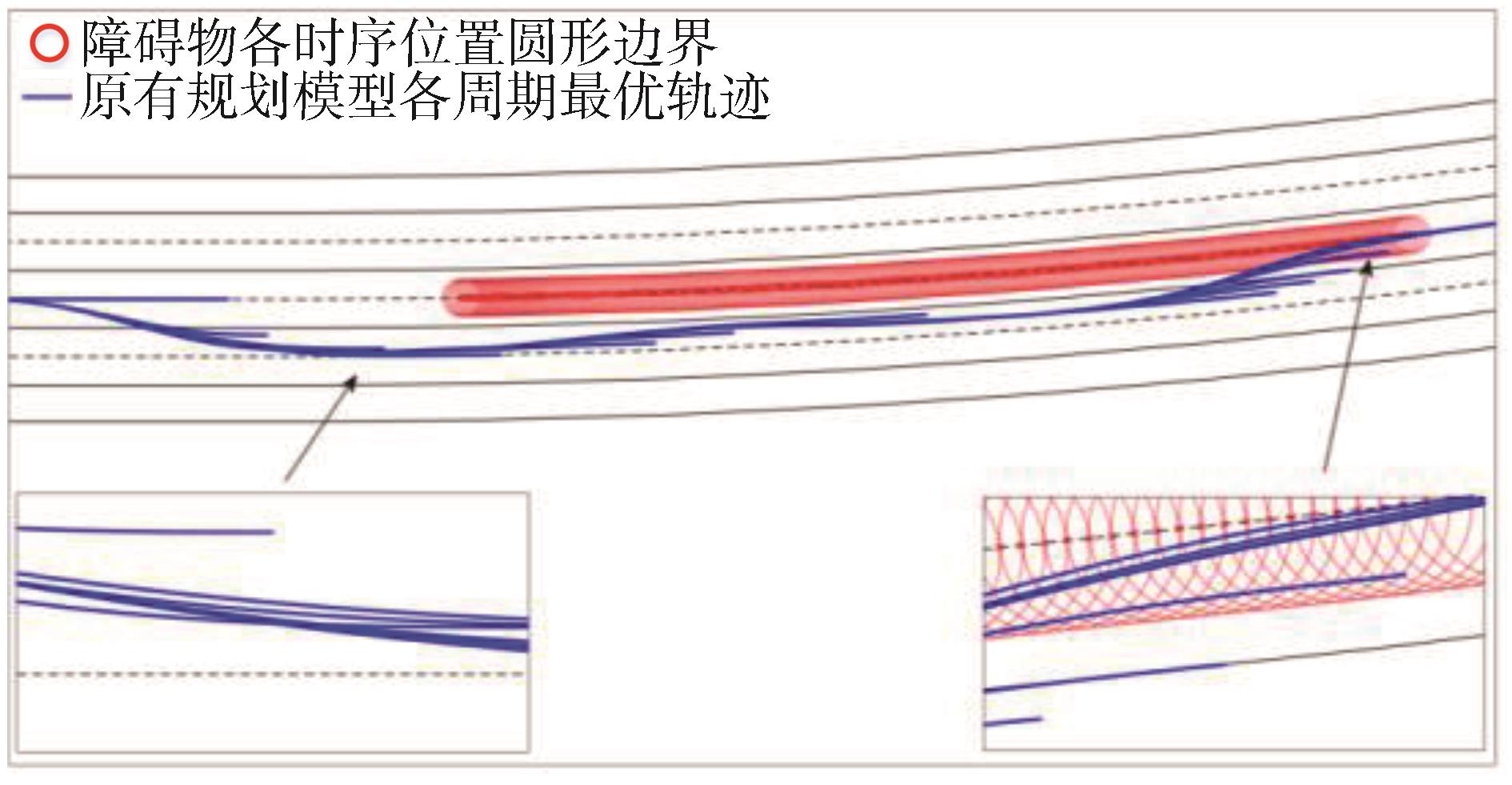

图18
原有规划模型开始回归原道路中心时轨迹行驶状态"

图19
t=29.5 s,与相邻周期t=29 s最优轨迹对比"
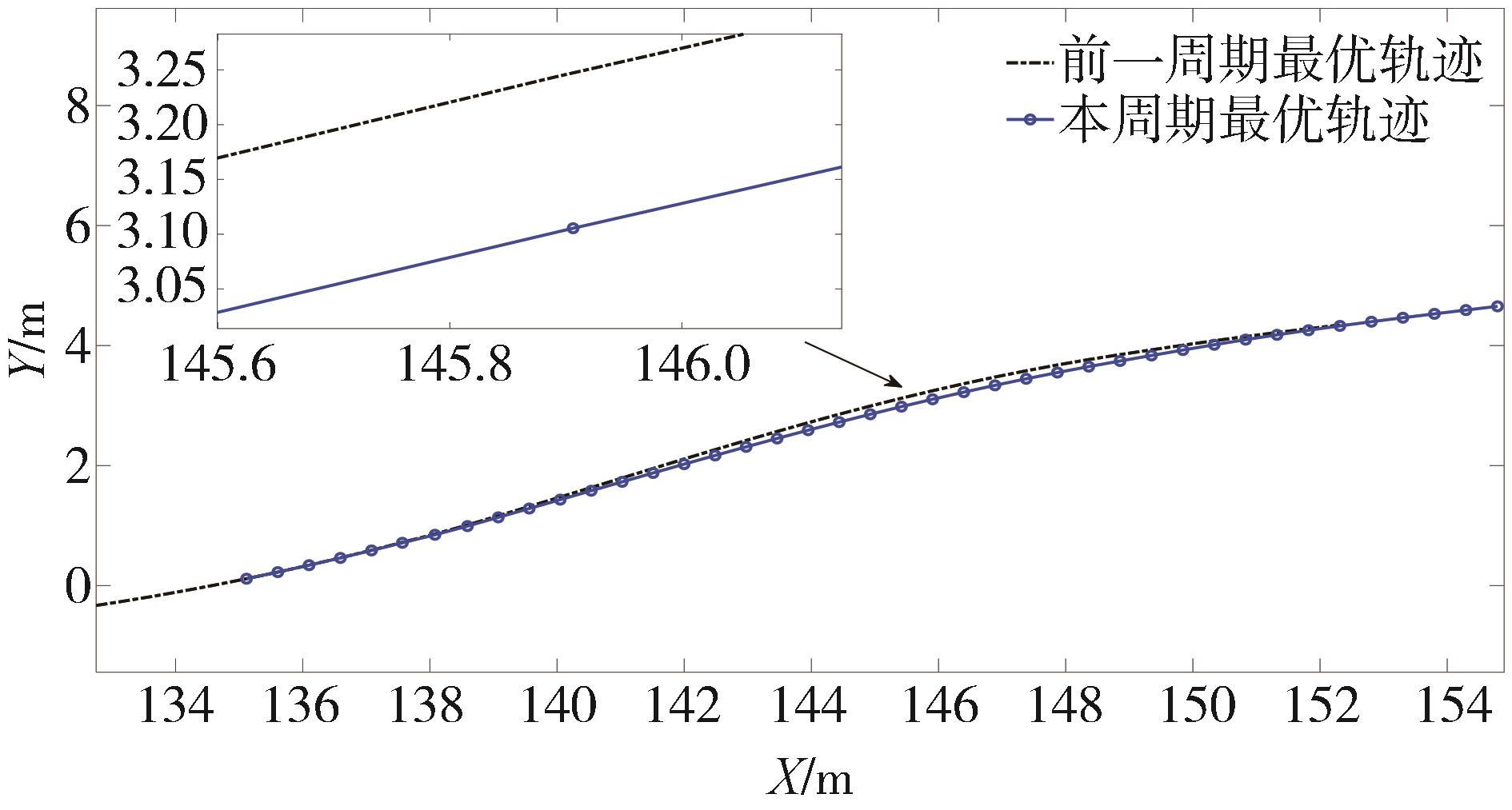
图20
所提轨迹更新模型的部分路段动态障碍物避障"
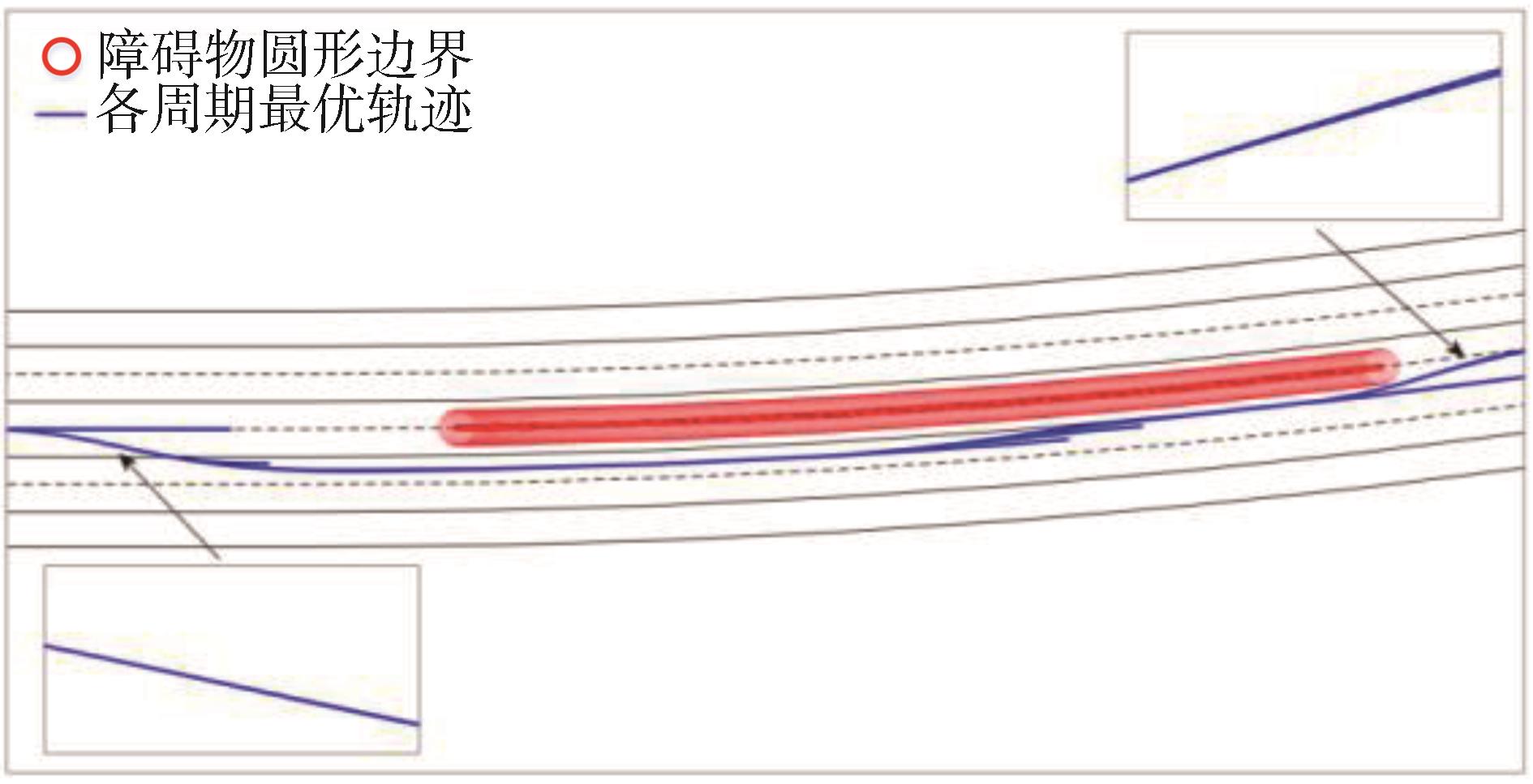
图21
回归原道路中心行驶时第一周期强规划最优轨迹"
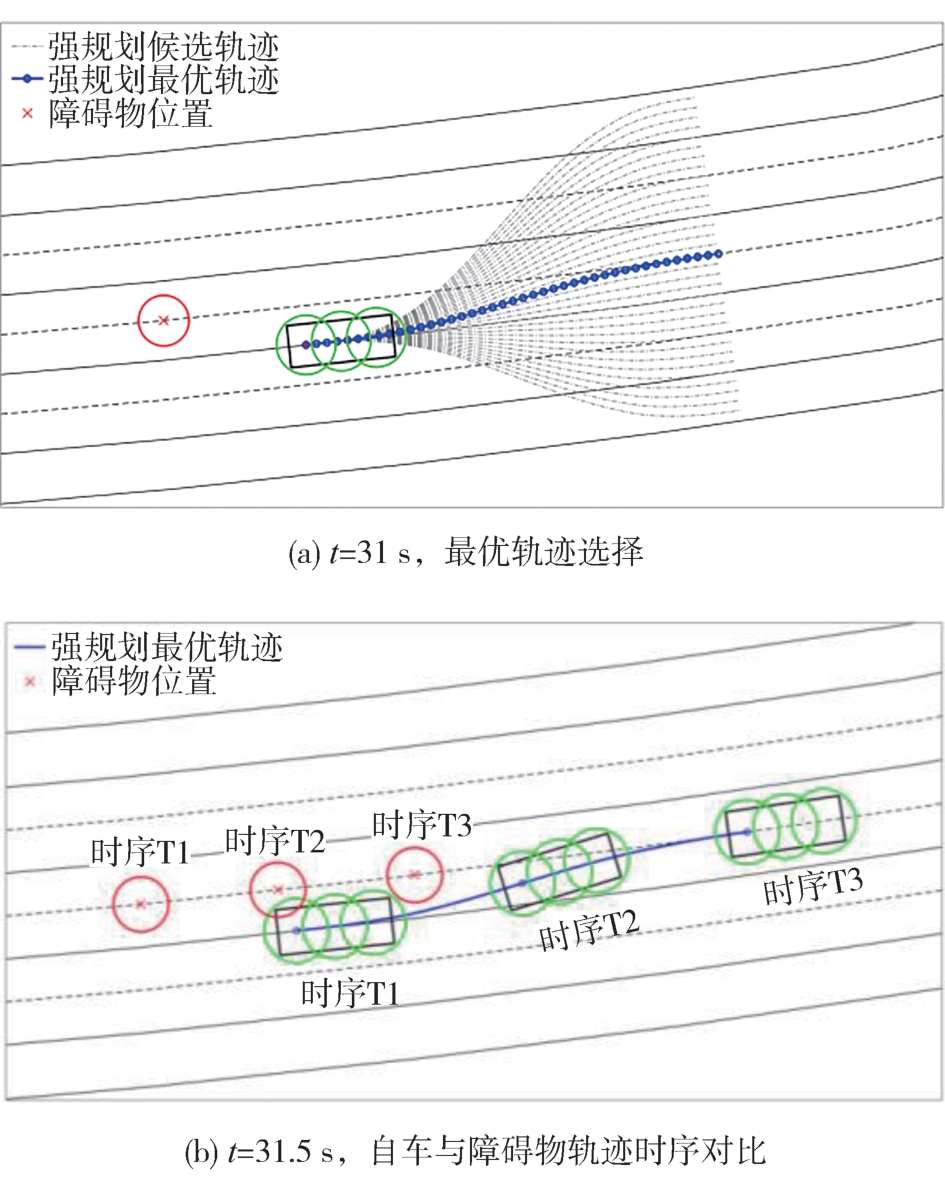
图22
回归原道路中心行驶时初始轨迹状态"
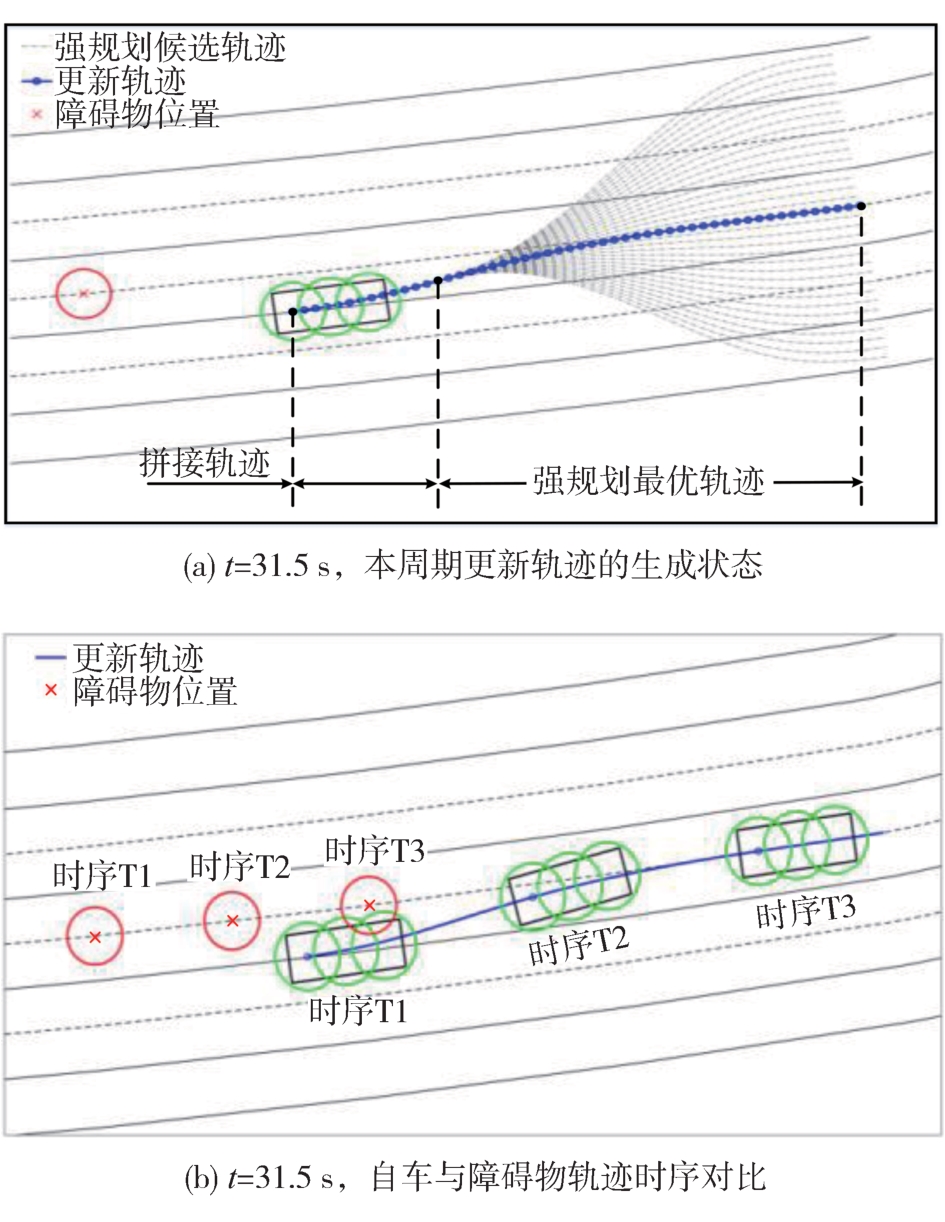
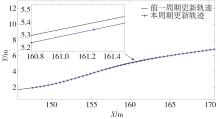
图23
t=31.5 s,与相邻周期t=31 s的轨迹对比"
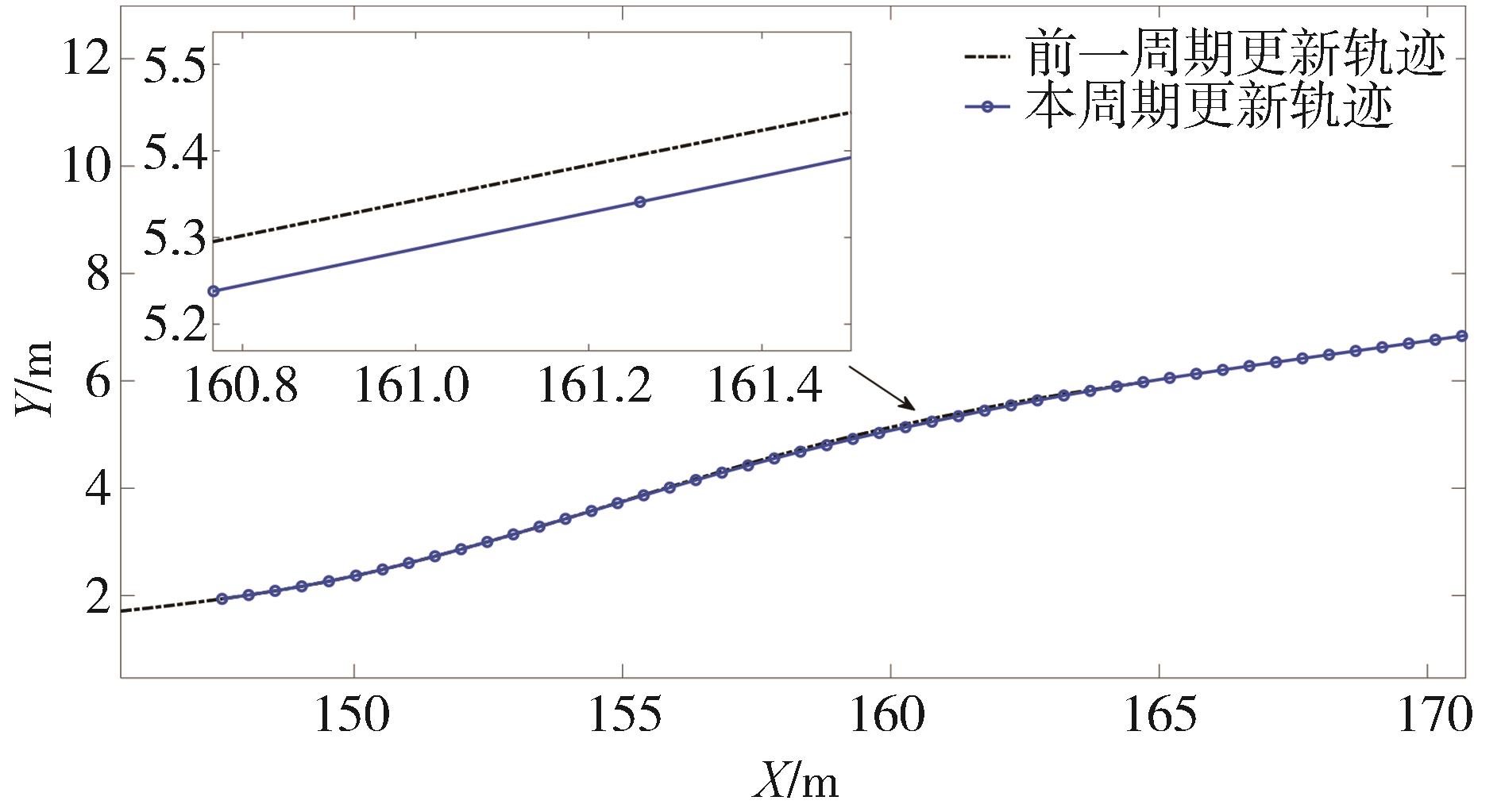

图24
实验智能车"

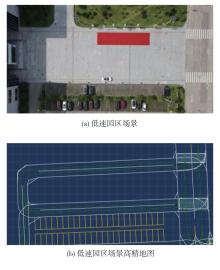
图25
园区高精地图"

图26
园区广场高精地图对应全局路径"
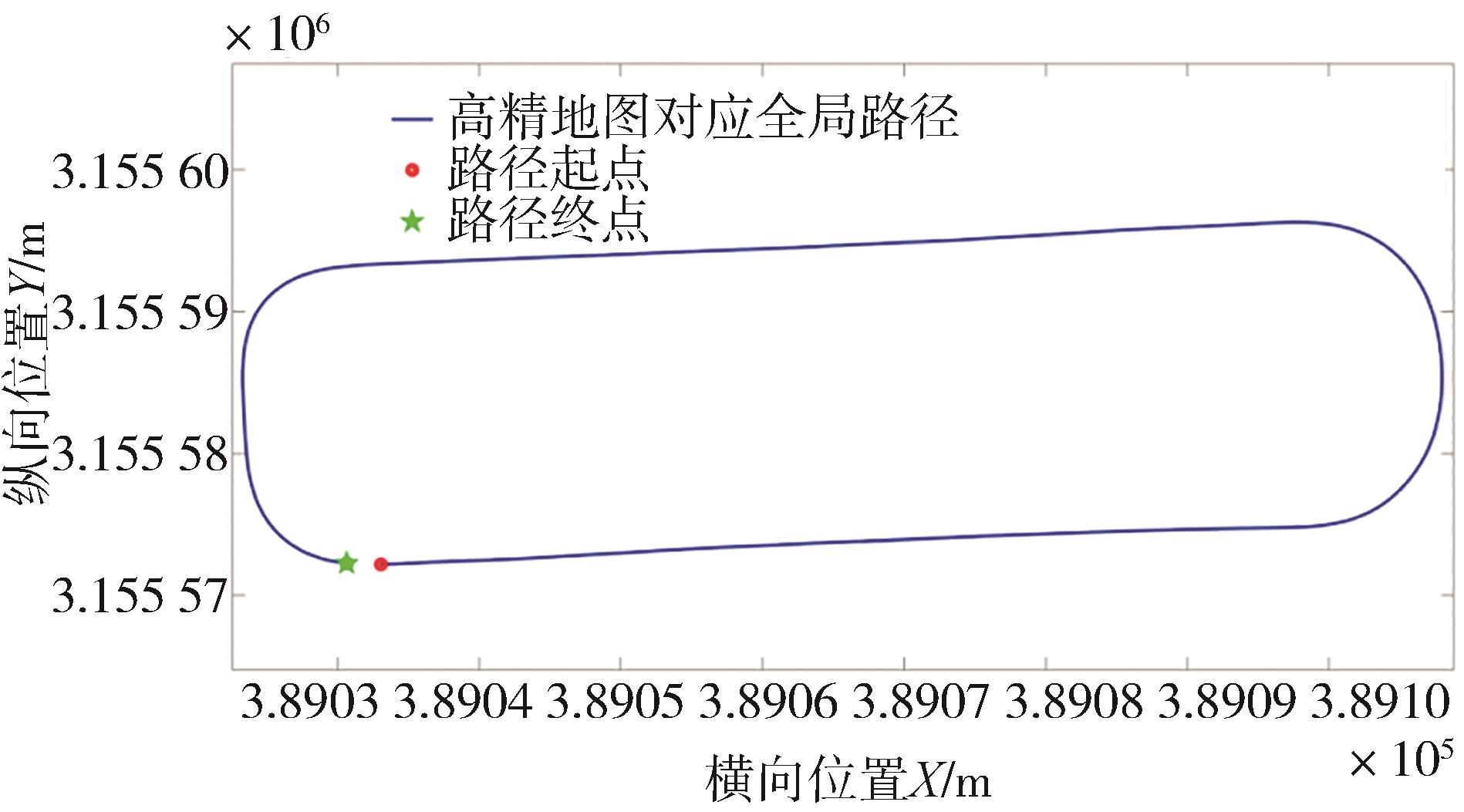
图27
避障过程可视化车辆及其轨迹状态"
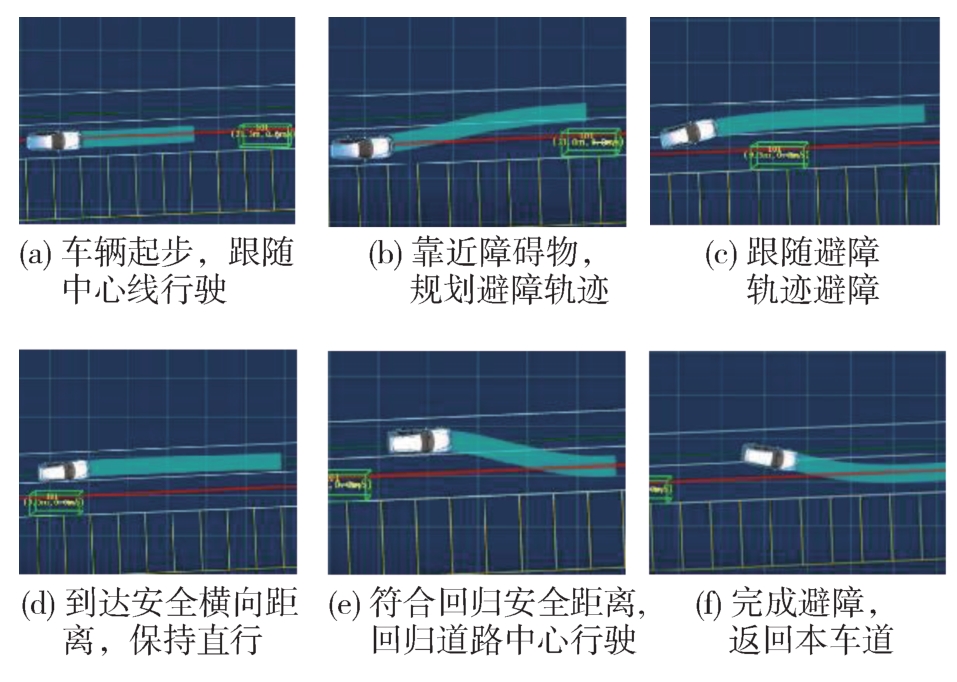

图28
智能车避障环境状态"
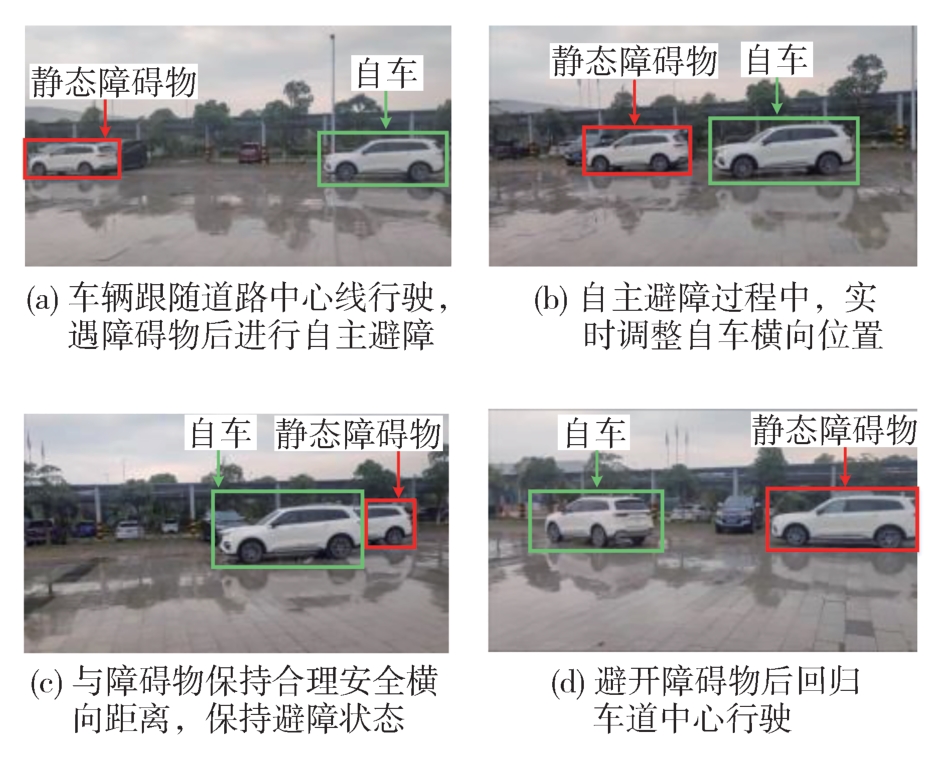
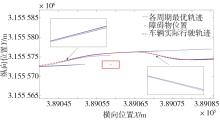
图29
避障阶段各周期最优轨迹"
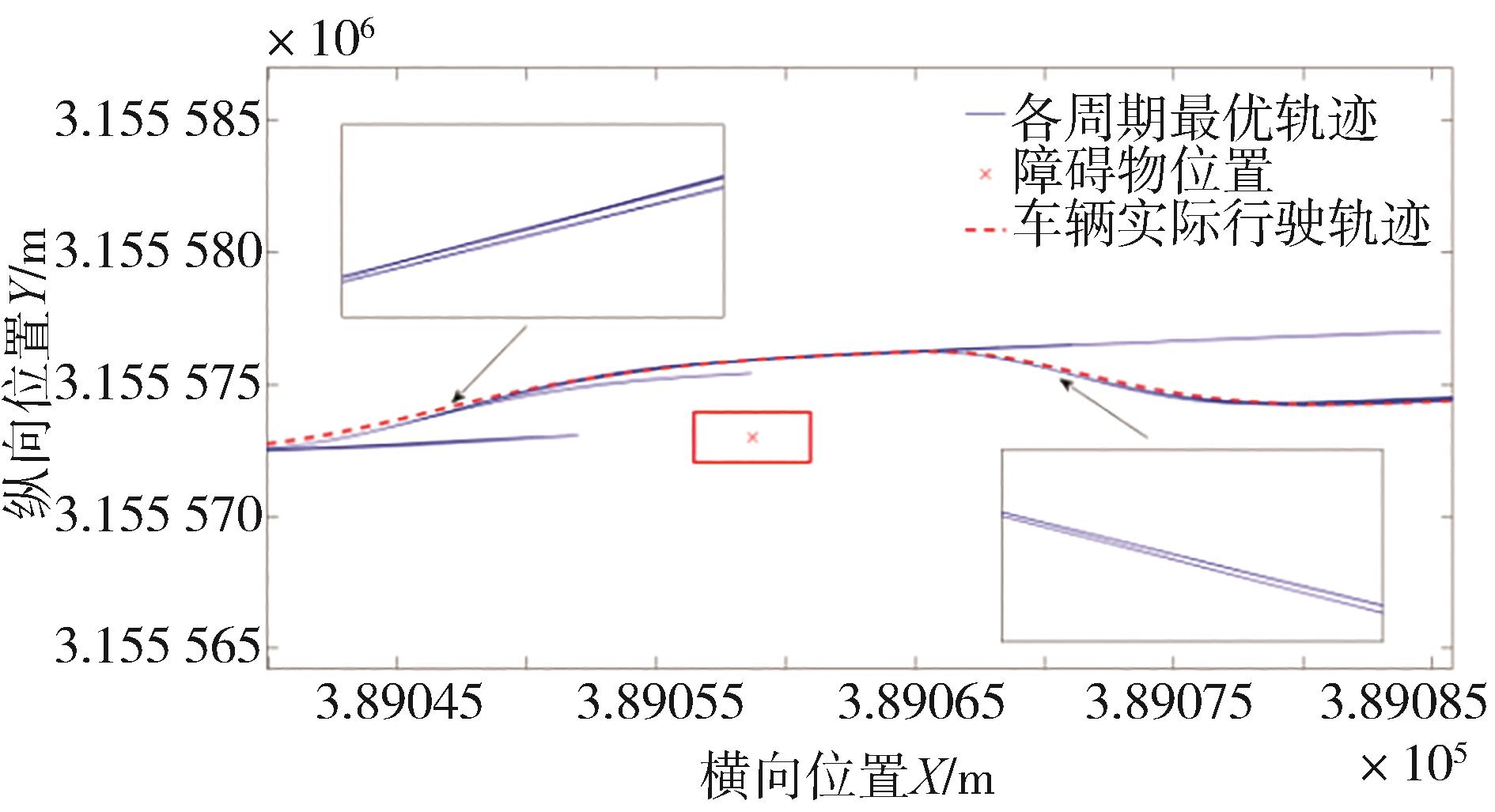
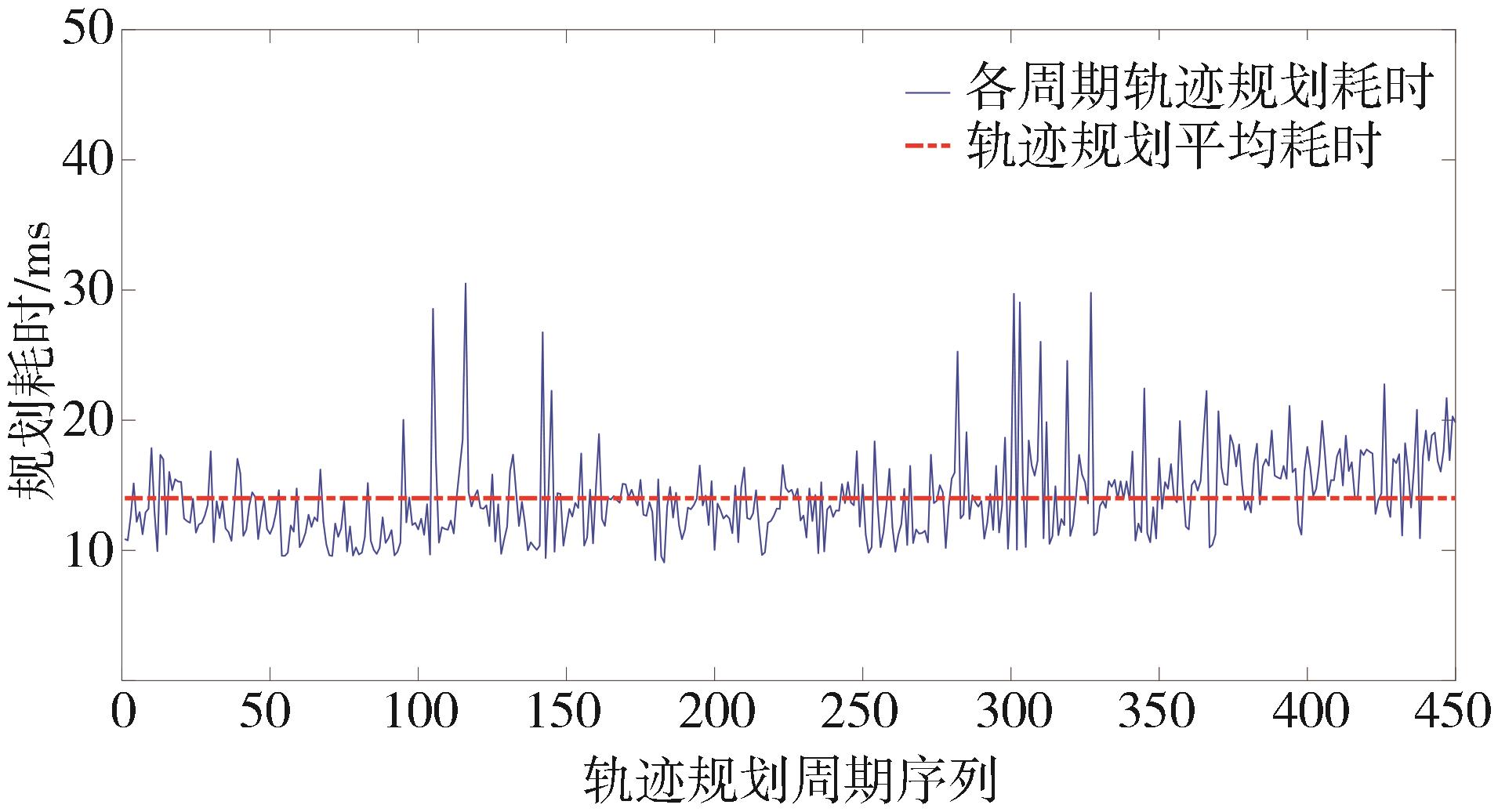
图30
智能车规划模块耗时"
| 1 | KALA R, WARWICK K. Multi-level planning for semi-autonomous vehicles in traffic scenarios based on separation maximization[J]. Journal of Intelligent & Robotic Systems, 2013, 72(3): 559-590. |
| 2 | 封硕,吉现友,程博,等.融合动态障碍物运动信息的路径规划算法[J].计算机工程与应用, 2022,58(21):279-285. |
| FENG S, JI X Y, CHEN B, et al. Path planning algorithm based on dynamic obstacle movement information[J]. Computer Engineering and Application, 2022, 58(21): 279-285. | |
| 3 | MCNAUGHT M, URMSON C, DOLAN J M, et al. Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]. 2011 IEEE International Conference on Robotics and Automation. IEEE, 2011: 4889-4895. |
| 4 | LAVALLE S M, KUFFNER J J J. Randomized kinodynamic motion planning[J]. The International Journal of Robotics Research, 2001, 20(5): 378-400. |
| 5 | KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 6 | 江洪,蒋潇杰.基于RRT改进的路径规划算法[J].重庆理工大学学报(自然科学),2021,35(7):10-16,124. |
| JIANG H, JIANG X J. Improved path planning algorithm based on RRT[J]. Journal of Chongqing University of Technology (Natural Science), 2021, 35(7):10-16,124. | |
| 7 | GUO H Y, SHEN C, ZHANG H, et al. Simultaneous trajectory planning and tracking using an MPC method for cyber-physical systems: a case study of obstacle avoidance for an intelligent vehicle[J].IEEE Transactions on Industrial Informatics,2018,14(9): 4273-4283. |
| 8 | LI C, LI X Y, LI J X, et al. Trajectory planning for autonomous ground vehicles driving in structured environments[C]. 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, 2017, 2: 41-46. |
| 9 | 郄天琪,王伟达,杨超,等. 基于模型预测控制方法的智能车路径规划策略研究[C]. 2021中国汽车工程学会年会论文集,2021:119-123. |
| QIE T Q, WANG W D, YANG C, et al. A path planning method for intelligent vehicles based on model predictive control method[C]. SAECCE-ICV061,2021:119-123. | |
| 10 | PETROV P, NASHASHIBI F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1643-1656. |
| 11 | LI X H, SUN Z P, CAO D P, et al. Real-time trajectory planning for autonomous urban driving: Framework, algorithms, and verifications[J]. IEEE/ASME Transactions on Mechatronics, 2015, 21(2): 740-753. |
| 12 | 高嵩,张金炜,戎辉,等.基于贝塞尔曲线的无人车局部避障应用[J].现代电子技术,2019, 42(9):163-166. |
| GAO S, ZHANG J W, RONG H, et al. Application of unmanned vehicle local obstacle avoidance method based on Bezier curve[J]. Modern Electronics Technique, 2019, 42(9):163-166. | |
| 13 | GONZALEZ D, PEREZ J, MILANES V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1135-1145. |
| 14 | 姜岩,王琦,龚建伟,等.无人驾驶车辆局部路径规划的时间一致性与鲁棒性研究[J].自动化学报,2015,41(3):518- 527. |
| JIANG Y, WANG Q, GONG J W, et al. Research on temporal consistency and robustness in local planning of intelligent vehicles[J]. Acta Automatica Sinica, 2015, 41(3):518- 527. | |
| 15 | WERLING M, ZIEGLER J, KAMMEL S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C]. 2010 IEEE International Conference on Robotics and Automation. IEEE, 2010: 987-993. |
| 16 | 田晓生. 智能车局部路径规划及路径跟踪方法研究[D].北京: 北京工业大学,2018. |
| TIAN X S. The research of local path planning and path tracking method for intelligent vehicle[D]. Beijing: Beijing University of Technology,2018. | |
| 17 | LI X H, SUN Z P, CAO D P, et al. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87:118-137. |
| 18 | 张志勇,邱国梁,黄彩霞,等.基于改进人工势场的自动驾驶汽车弯道超车动态路径规划[J].中国公路学报,2022, 35(12):268-278. |
| ZHANG Z Y, QIU G L, HUANG C X, et al. Dynamic path planning for self-driving cars overtaking on curves based on improved artificial potential field[J]. China Journal of Highway and Transport, 2022, 35(12): 268-278. | |
| 19 | 彭晓燕,谢浩,黄晶.无人驾驶汽车局部路径规划算法研究[J].汽车工程,2020,42(1):1-10. |
| PENG X Y, XIE H, HUANG J. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering,2020,42(1):1-10. | |
| 20 | HU X M, CHEN L, TANG B, et al. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles[J]. Mechanical Systems and Signal Processing, 2018, 100: 482-500. |
| 21 | 魏民祥,滕德成,吴树凡.基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J].控制与决策,2021,36 (4):815-824. |
| WEI M X, TENG D C, WU S F. Trajectory planning and optimization algorithm for automated driving based on Frenet coordinate system[J]. Control and Decision, 2021,36 (4):815-824. | |
| 22 | 龚建伟. 无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社有限责任公司, 2020. |
| GONG J W. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press,2020. |
| [1] | 秦洪懋,沈国利,周云水,黄圣杰,秦晓辉,谢国涛,丁荣军. 特征稀疏场景下基于标签的车辆视觉SLAM[J]. 汽车工程, 2023, 45(9): 1543-1552. |
| [2] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [3] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [4] | 郑燚,张世民,陆云龙. 基于AUTOSAR的域控制器以太网通信系统设计实现[J]. 汽车工程, 2023, 45(6): 965-973. |
| [5] | 胡杰,刘昊岩,张敏超,张志豪,朱琪,陈锐鹏,骆嫚. 基于有限状态机的代客泊车决策规划系统研究[J]. 汽车工程, 2023, 45(2): 243-252. |
| [6] | 严凉,吴晓东,胡川. 面向密集障碍规避的人车共享转向控制系统[J]. 汽车工程, 2023, 45(12): 2222-2233. |
| [7] | 胡丹丹,尹鹏飞,牛国臣,赵金聚. 非结构化道路下离轴式拖挂车辆主动避障控制研究[J]. 汽车工程, 2023, 45(12): 2318-2329. |
| [8] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [9] | 李江坤,邓伟文,任秉韬,王文奇,丁娟. 基于场景动力学和强化学习的自动驾驶边缘测试场景生成方法[J]. 汽车工程, 2022, 44(7): 976-986. |
| [10] | 唐斌,许占祥,江浩斌,蔡英凤,胡子添,杨铮奕. 基于分段优化的车辆换道避障轨迹规划[J]. 汽车工程, 2022, 44(6): 831-841. |
| [11] | 杨彬,宋学伟,高振海. 考虑车辆运动约束的最优避障轨迹规划算法[J]. 汽车工程, 2021, 43(4): 562-570. |
| [12] | 郭景华,李文昌,罗禹贡,陈涛,李克强. 基于深度强化学习的驾驶员跟车模型研究[J]. 汽车工程, 2021, 43(4): 571-579. |
| [13] | 张家旭, 施正堂, 赵健, 朱冰. 基于Radau伪谱法的汽车高速紧急换道避障最优控制策略设计*[J]. 汽车工程, 2020, 42(8): 1040-1049. |
| [14] | 郭景华, 李克强, 王进, 陈涛, 李文昌, 王班. 基于危险场景聚类分析的前车随机运动状态预测研究*[J]. 汽车工程, 2020, 42(7): 847-853. |
| [15] | 胡朝辉, 黄顺霞, 杜展鹏, 郭星, 高鹤萱. 基于横向安全距离模型的主动避障算法[J]. 汽车工程, 2020, 42(5): 581-587. |
|
||