汽车工程 ›› 2025, Vol. 47 ›› Issue (7): 1394-1403.doi: 10.19562/j.chinasae.qcgc.2025.07.016
• • 上一篇
陈潇凯1( ),沈诚1,王茁伊1,刘向2
),沈诚1,王茁伊1,刘向2
Xiaokai Chen1(),Cheng Shen1,Zhuoyi Wang1,Xiang Liu2
摘要:
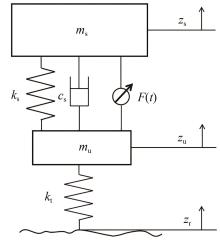
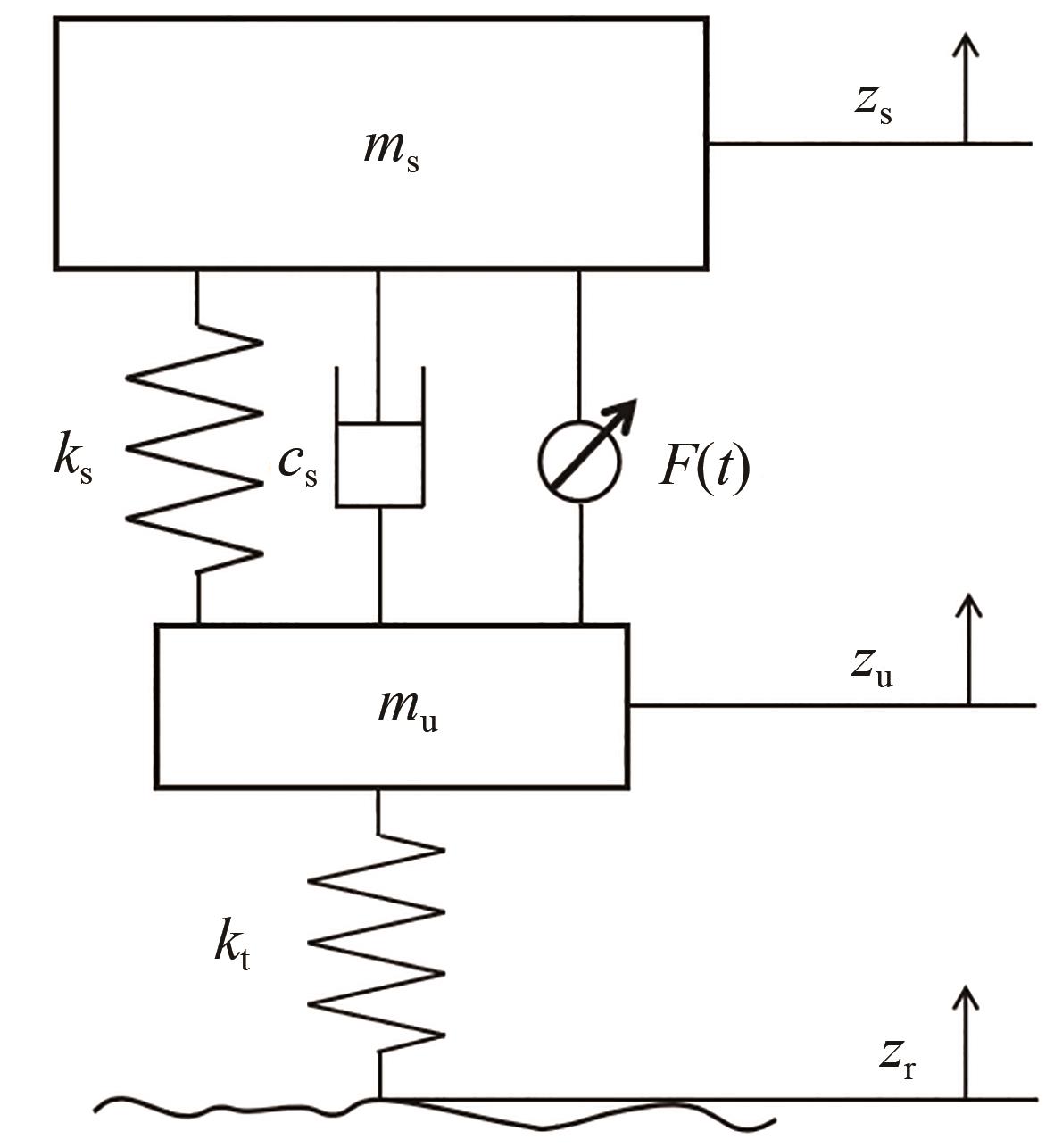
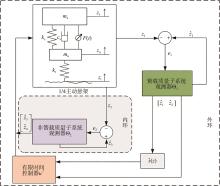
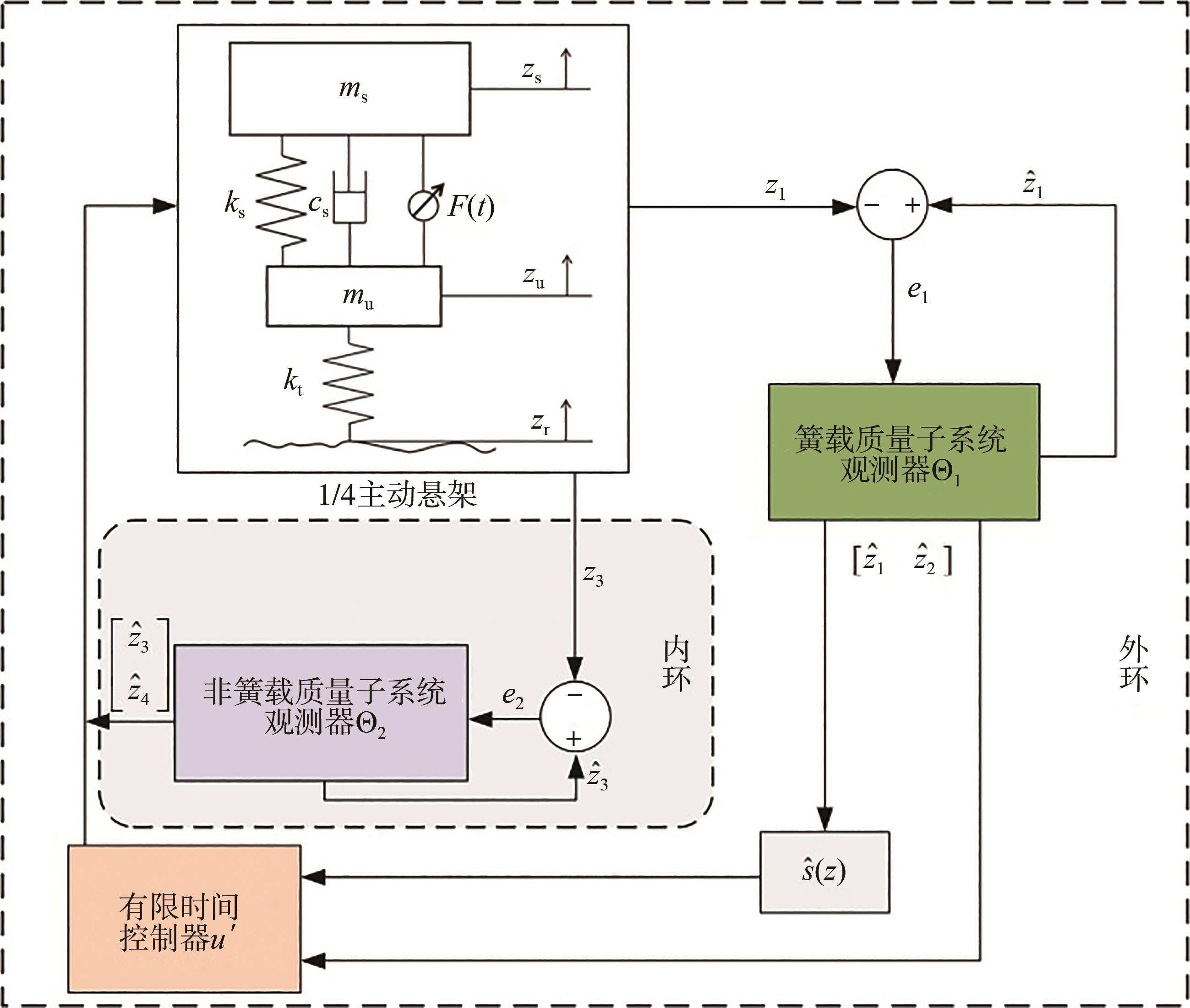
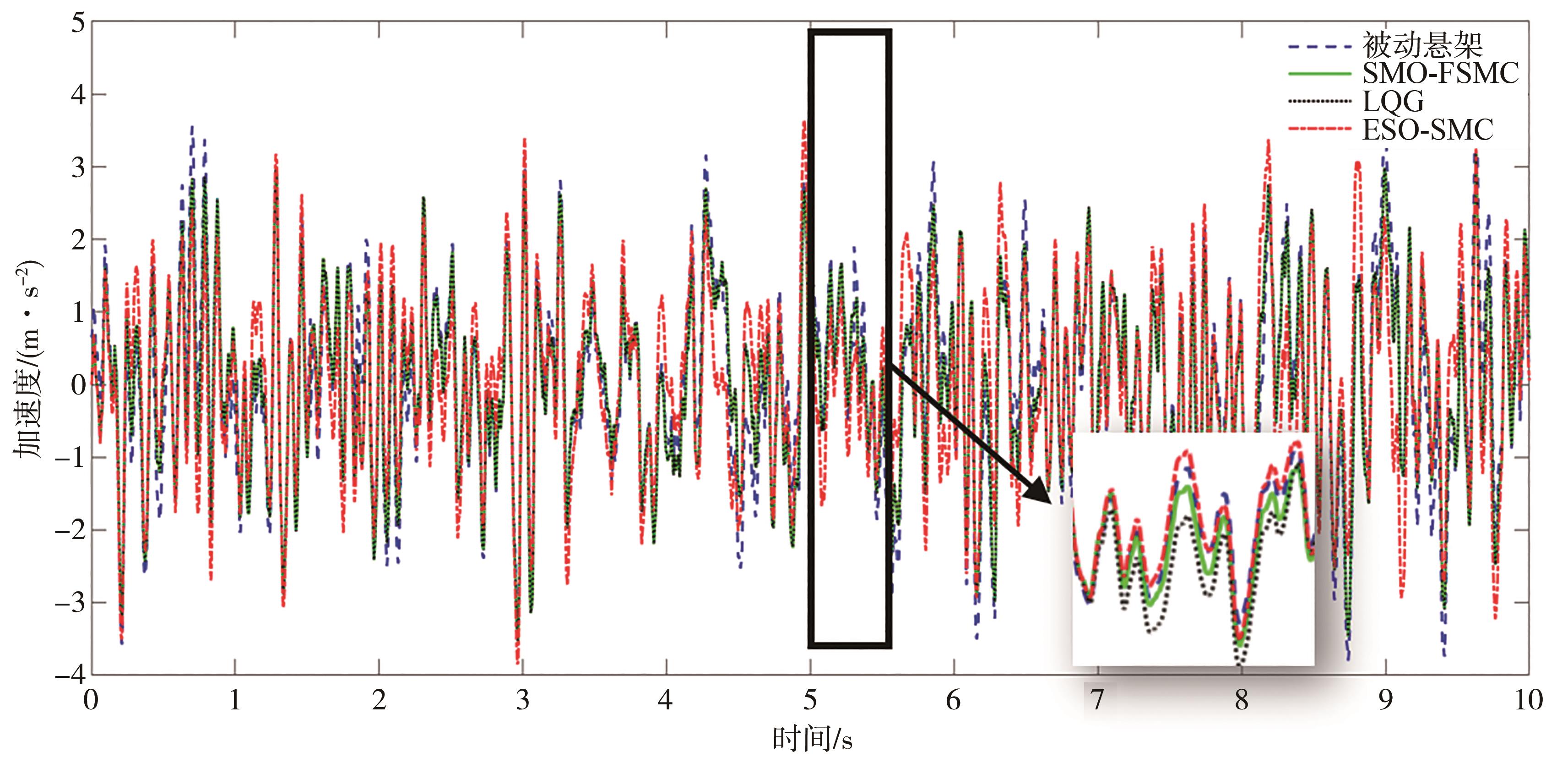
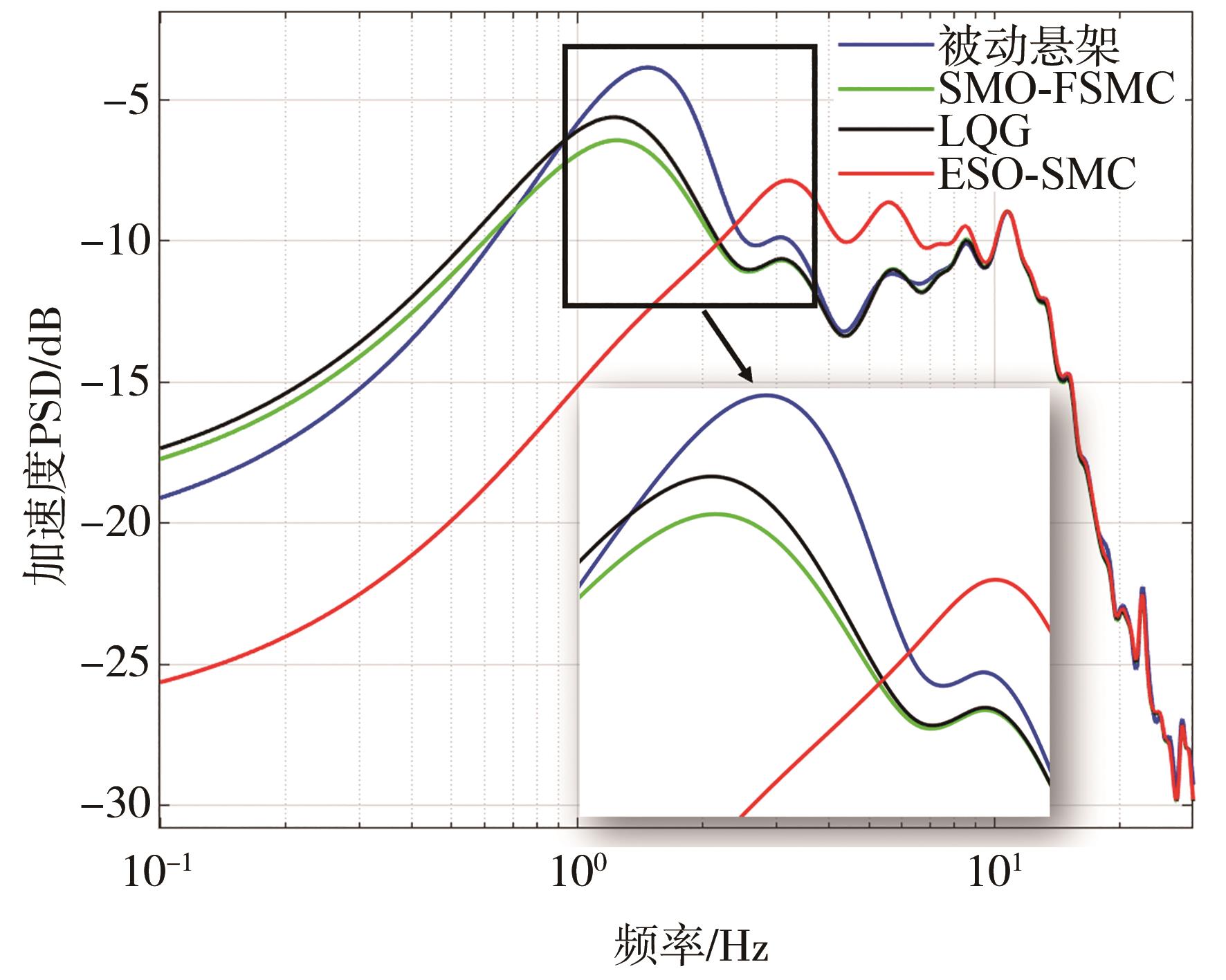
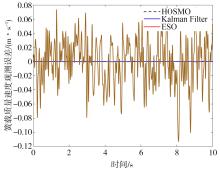
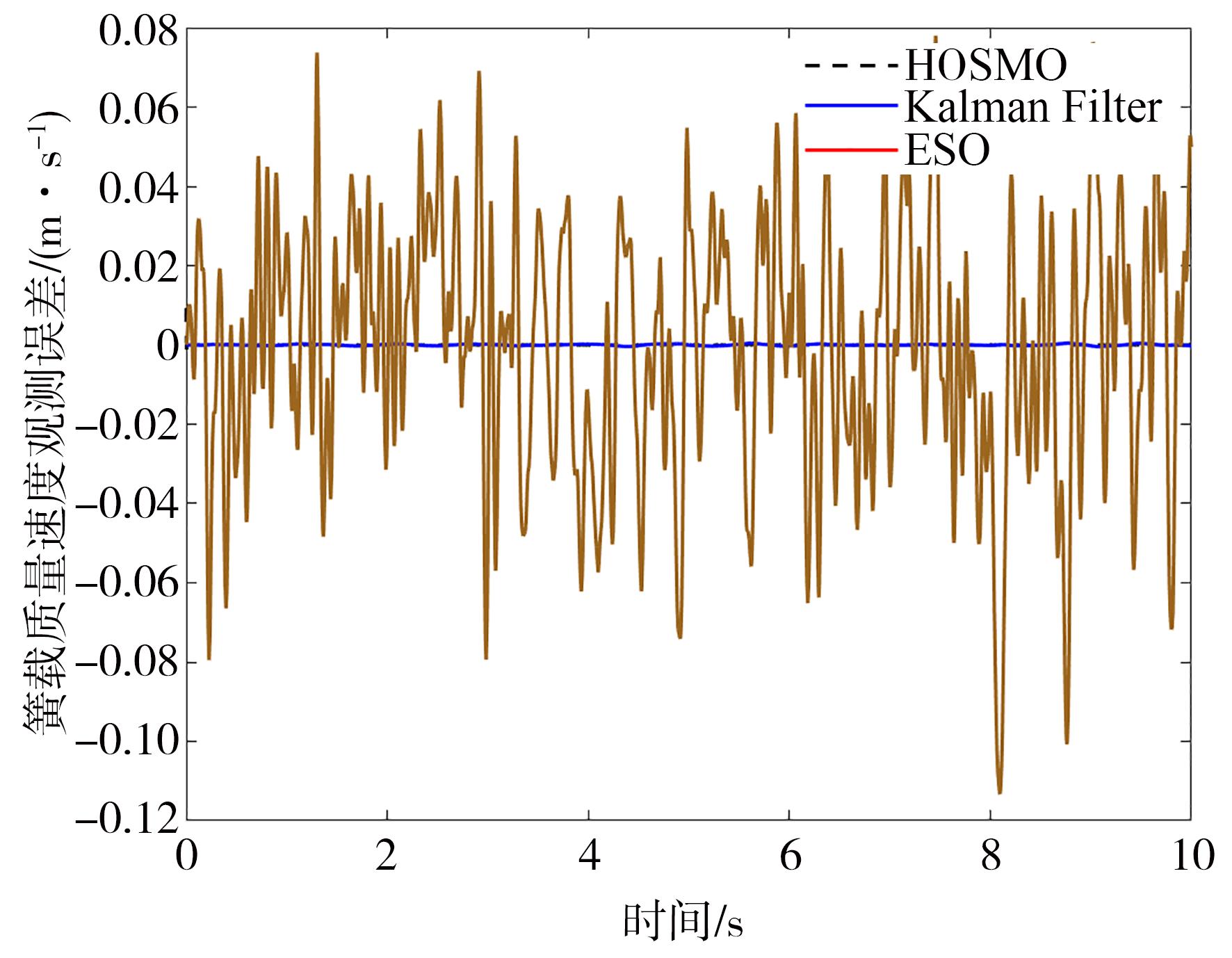
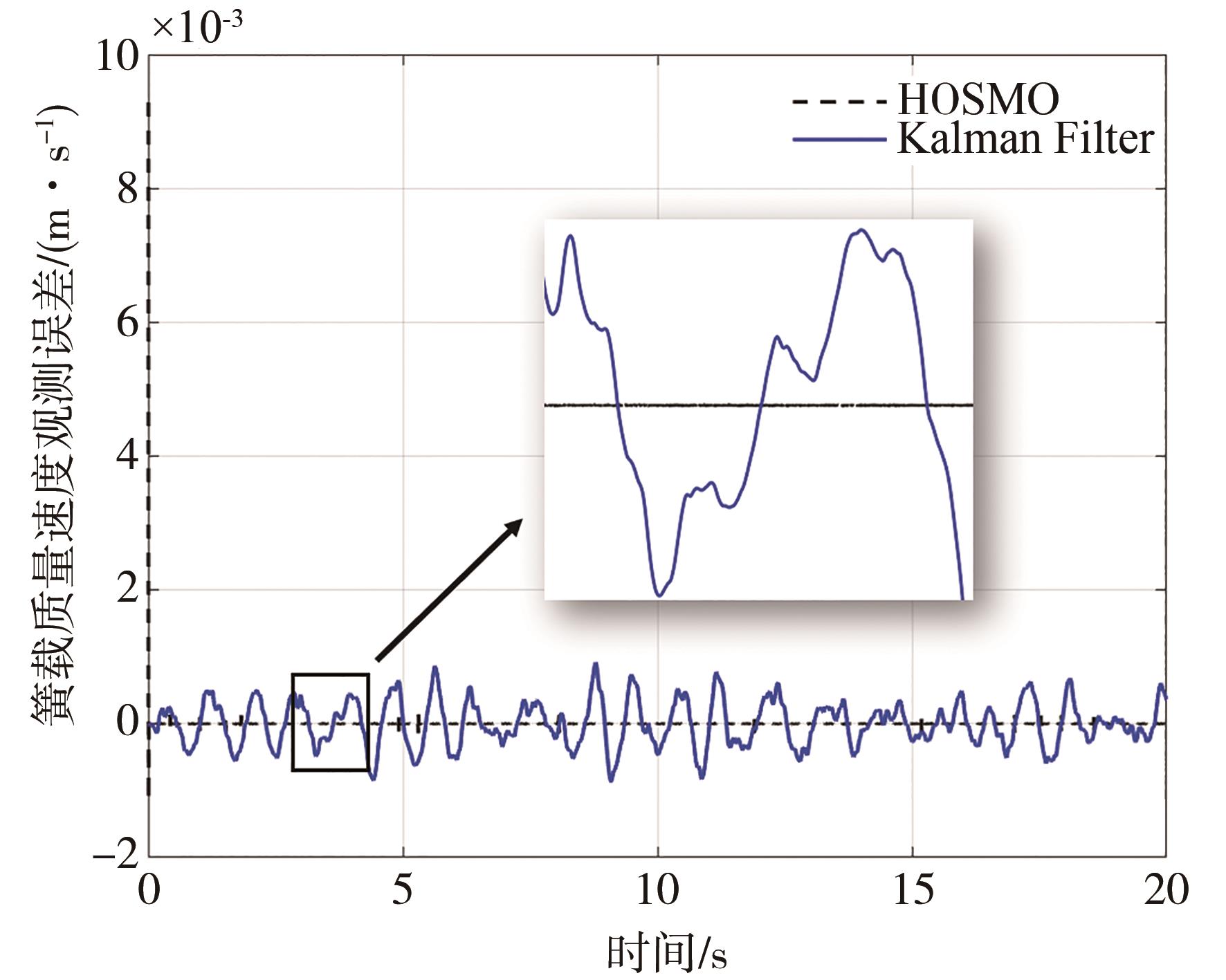
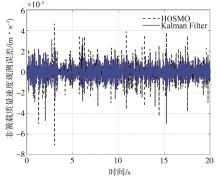
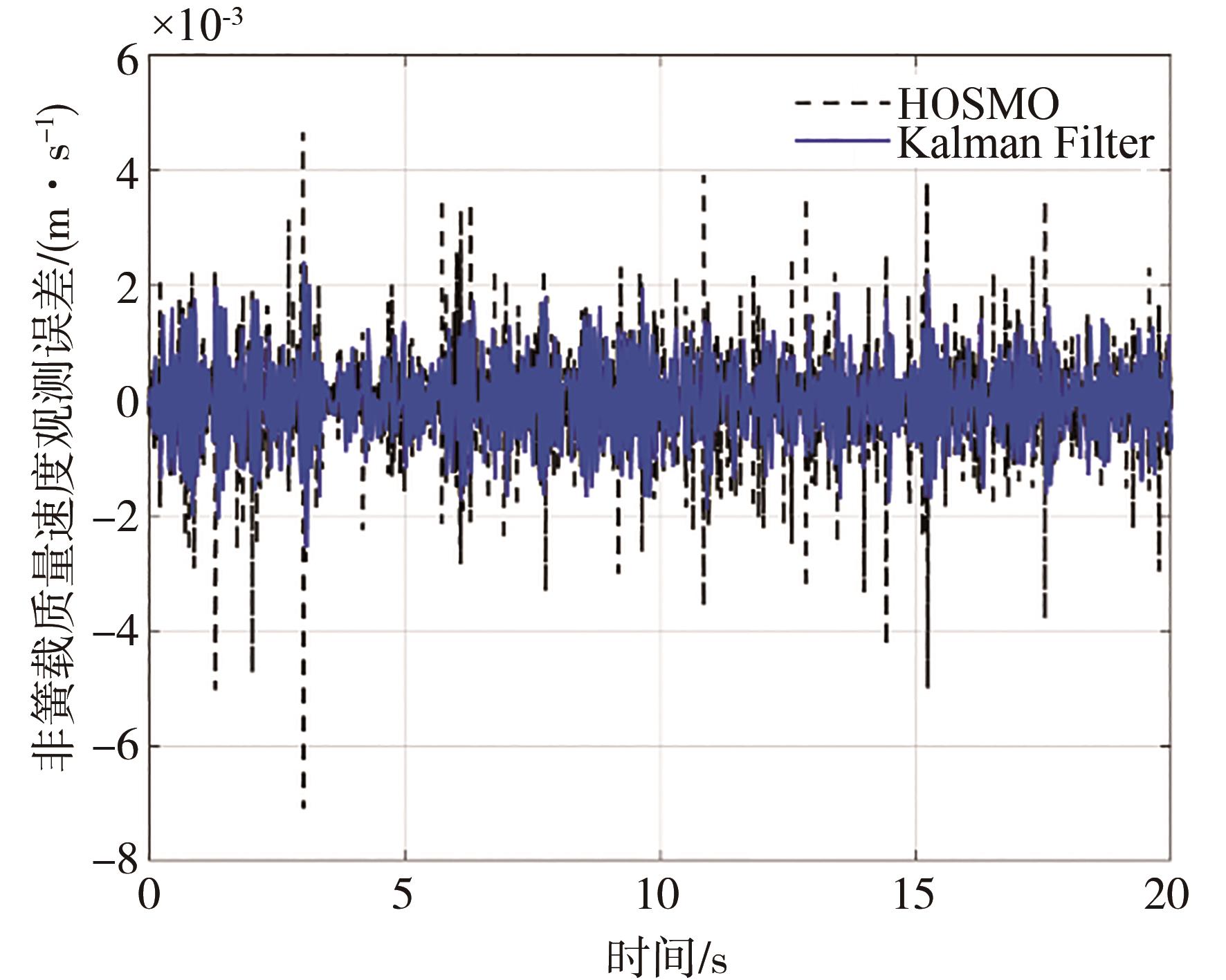
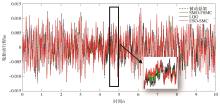
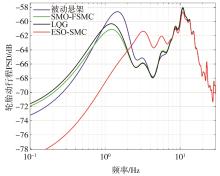
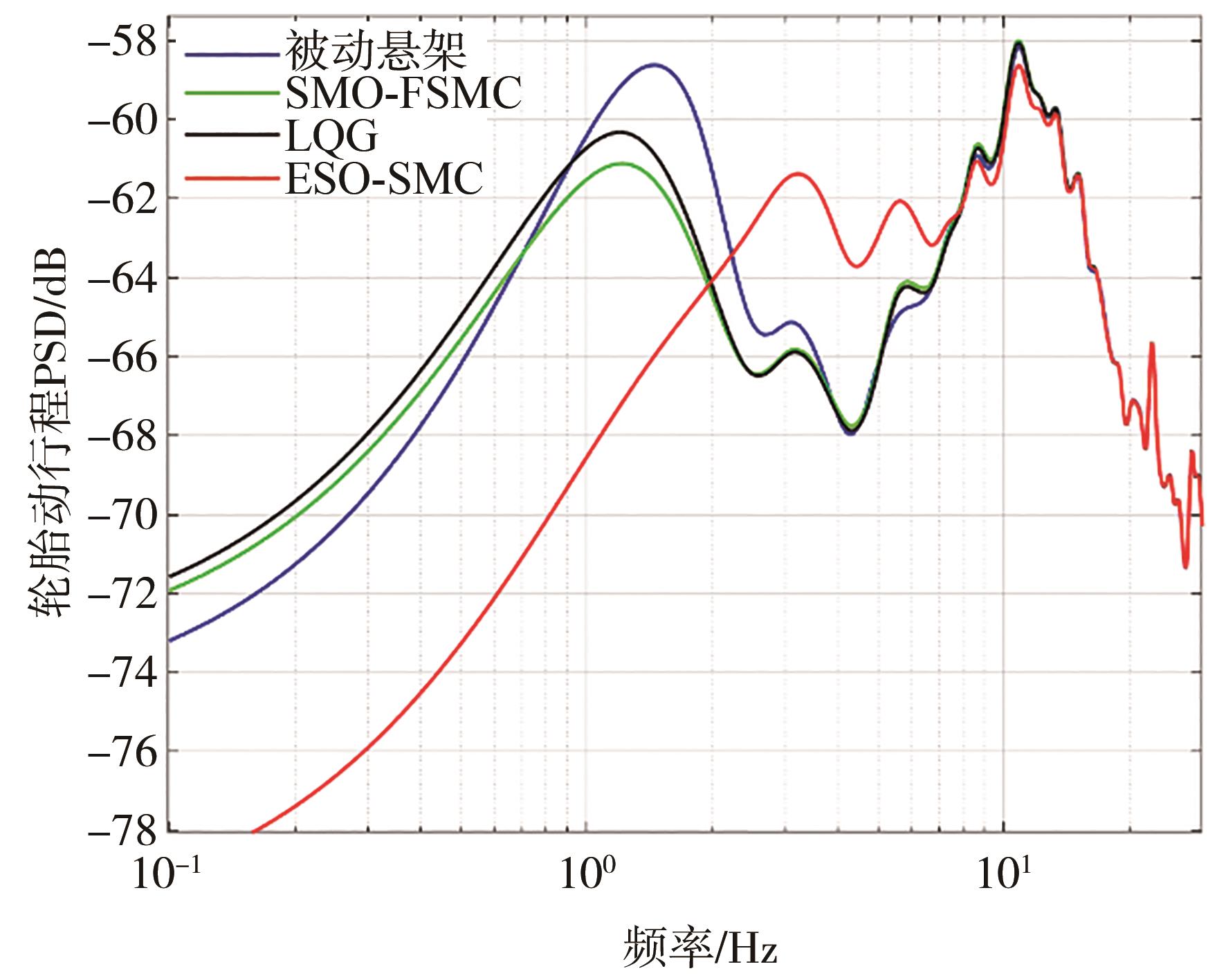
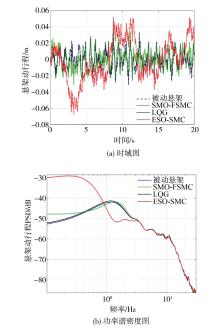
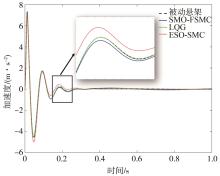
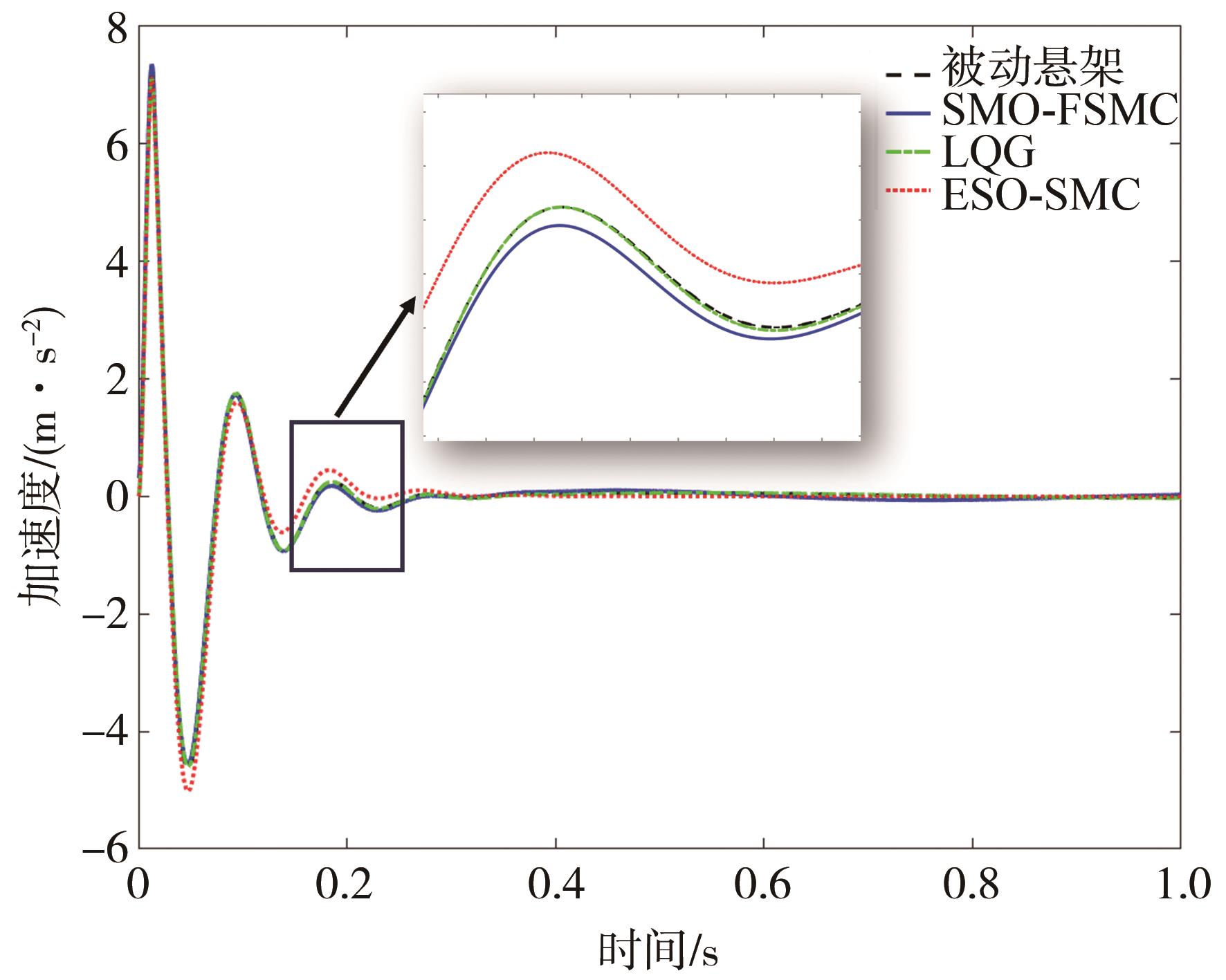
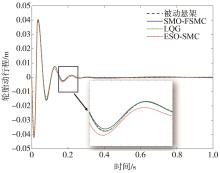
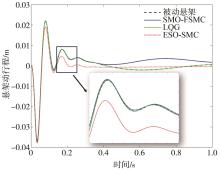
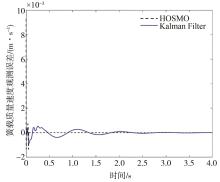
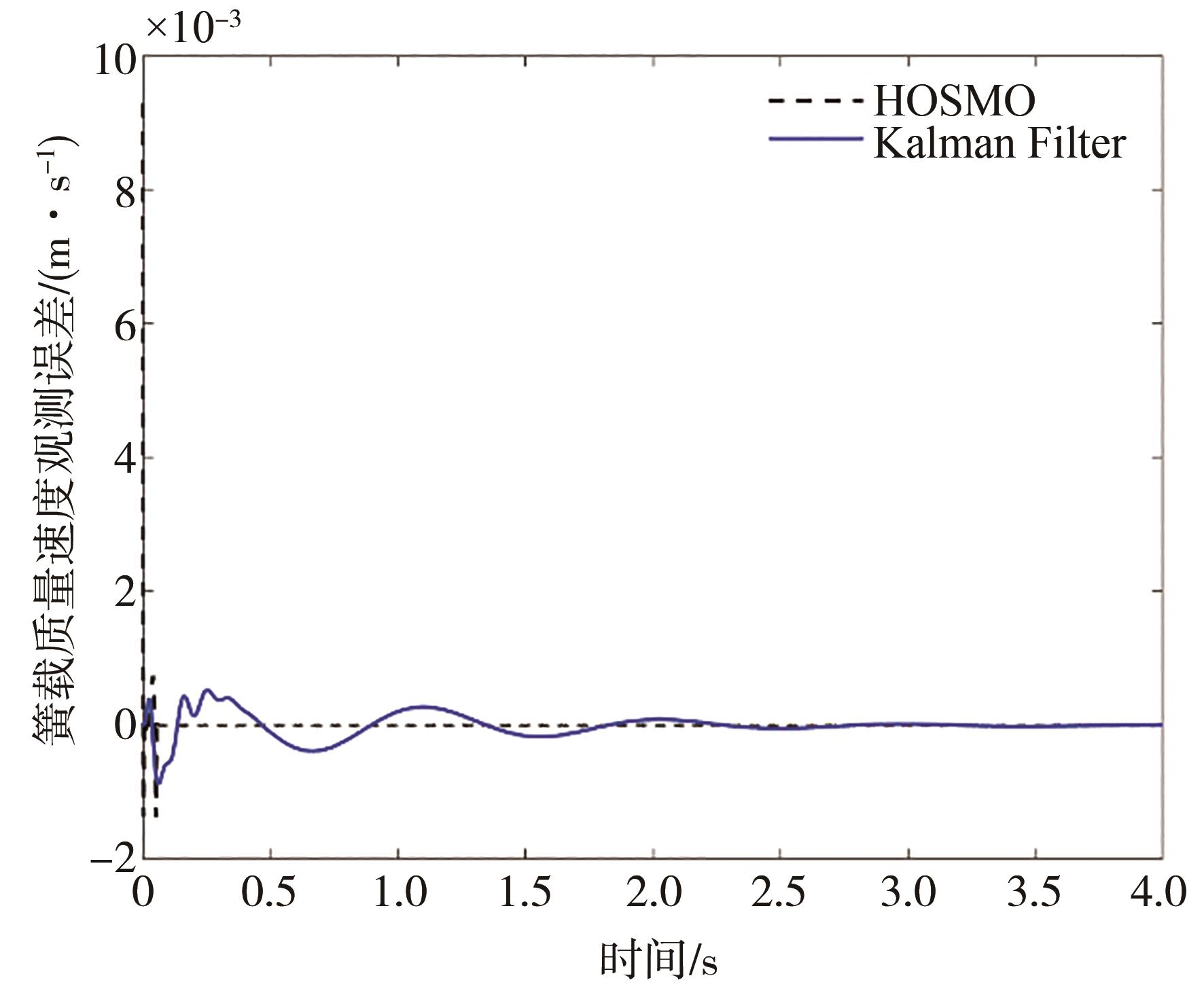
随着新能源汽车技术的发展,依赖车载传感器的智能悬架系统越来越普及。由于传感器存在测量噪声,在包含此类非高斯测量噪声的非匹配扰动下,经典控制算法无法很好地进行全状态观测,进而对控制系统性能造成很大影响。本文针对主动悬架中存在的传感噪声等非匹配扰动,以及系统非线性和未建模动态等匹配扰动,分别设计了能够对簧载质量系统和非簧载质量系统进行全状态观测的高阶滑模观测器,并进而设计了能够实现主动悬架全局固定时间收敛的闭环控制系统。仿真结果表明:随机路面工况下,相较于LQG以及扩张观测-滑模控制算法,本文提出的新型高阶滑模观测-固定时间滑模控制算法(SMO-FSMC)可以有效提升悬架的平顺性;相较于卡尔曼滤波器和扩张观测器,所提出的高阶滑模观测器对悬架系统的运动状态跟踪更准确,在面对扰动和测量噪声时系统具有更强的鲁棒性。减速带工况下,SMO-FSMC算法可以实现簧载质量垂向加速度的更快速收敛,有效改善了典型离散冲击工况的平顺性。