汽车工程 ›› 2025, Vol. 47 ›› Issue (11): 2224-2237.doi: 10.19562/j.chinasae.qcgc.2025.11.016
• • 上一篇
夏旭1,2,任国全1( ),张众杰2,王瑞萱1,潘世举2,李子先2
),张众杰2,王瑞萱1,潘世举2,李子先2
Xu Xia1,2,Guoquan Ren1(),Zhongjie Zhang2,Ruixuan Wang1,Shiju Pan2,Zixian Li2
摘要:
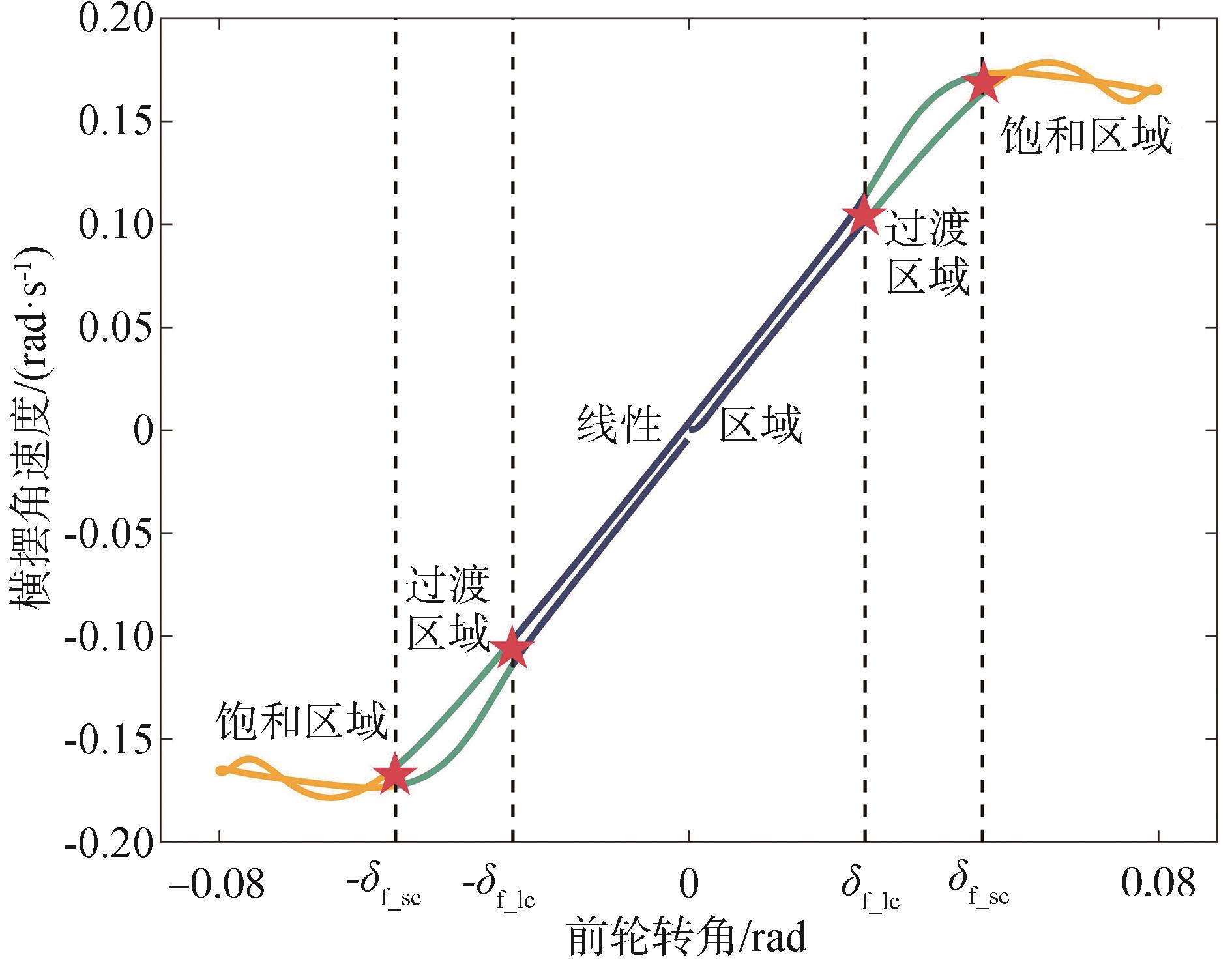
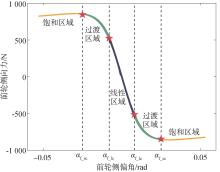
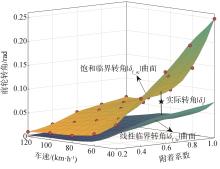
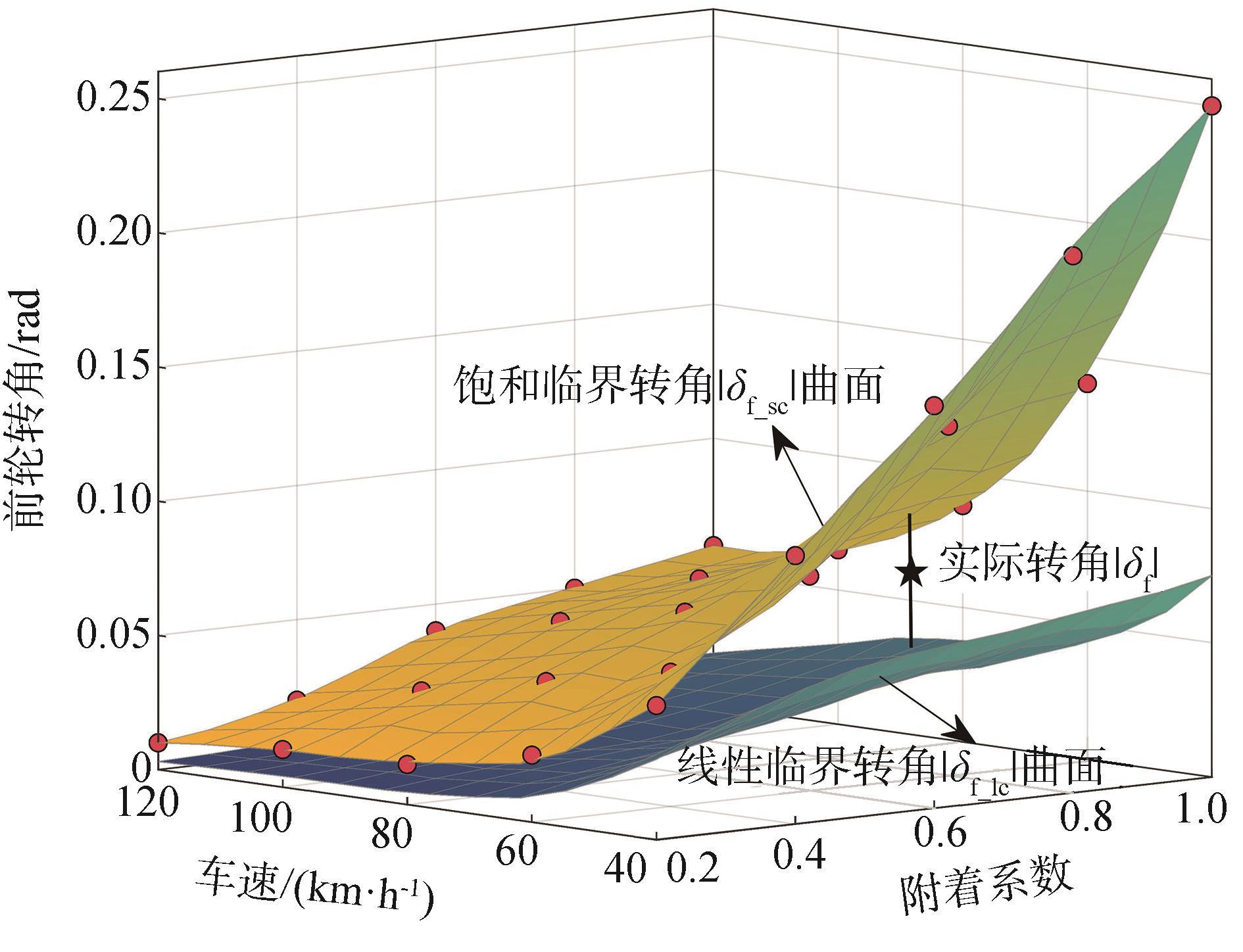
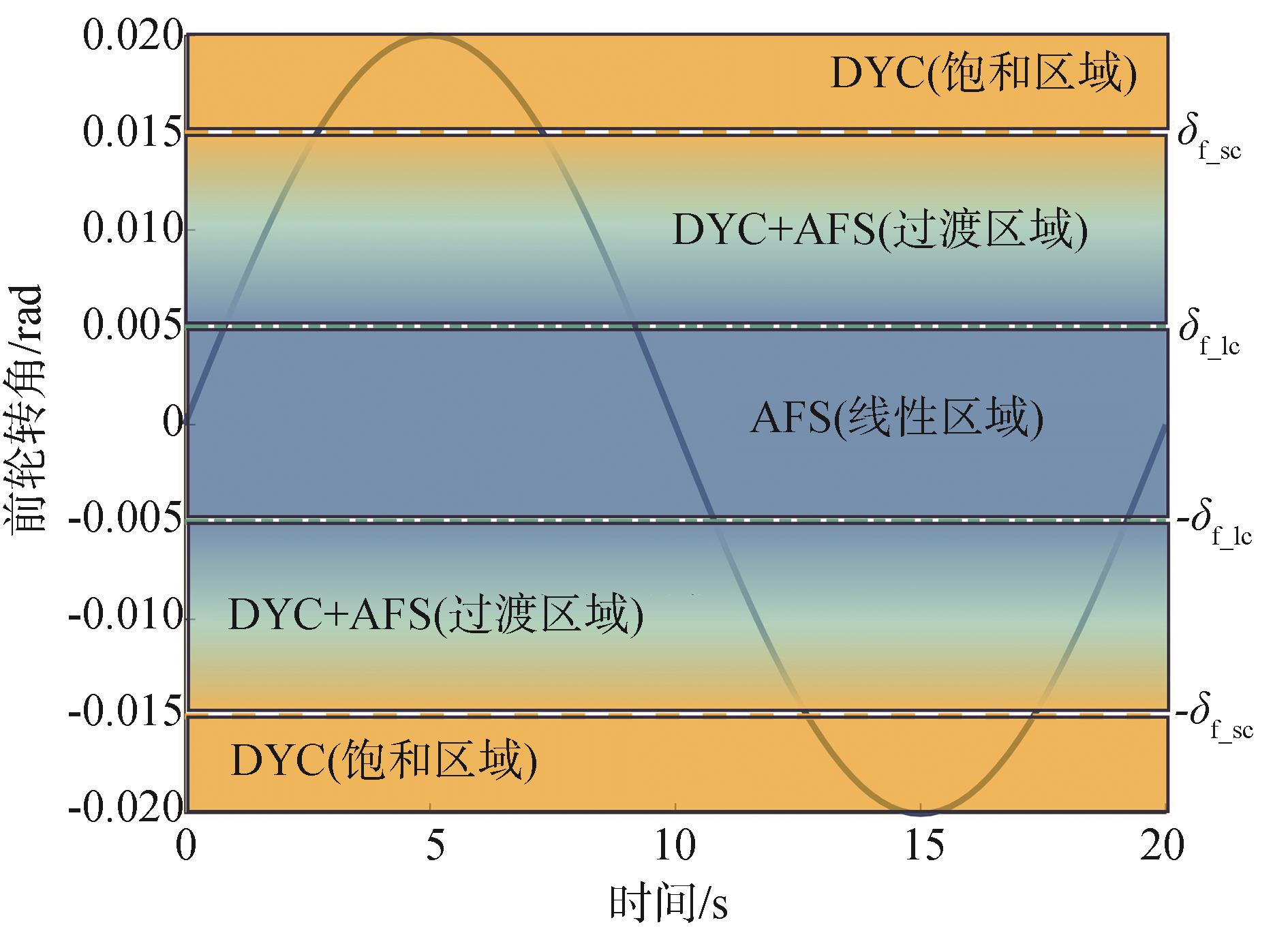
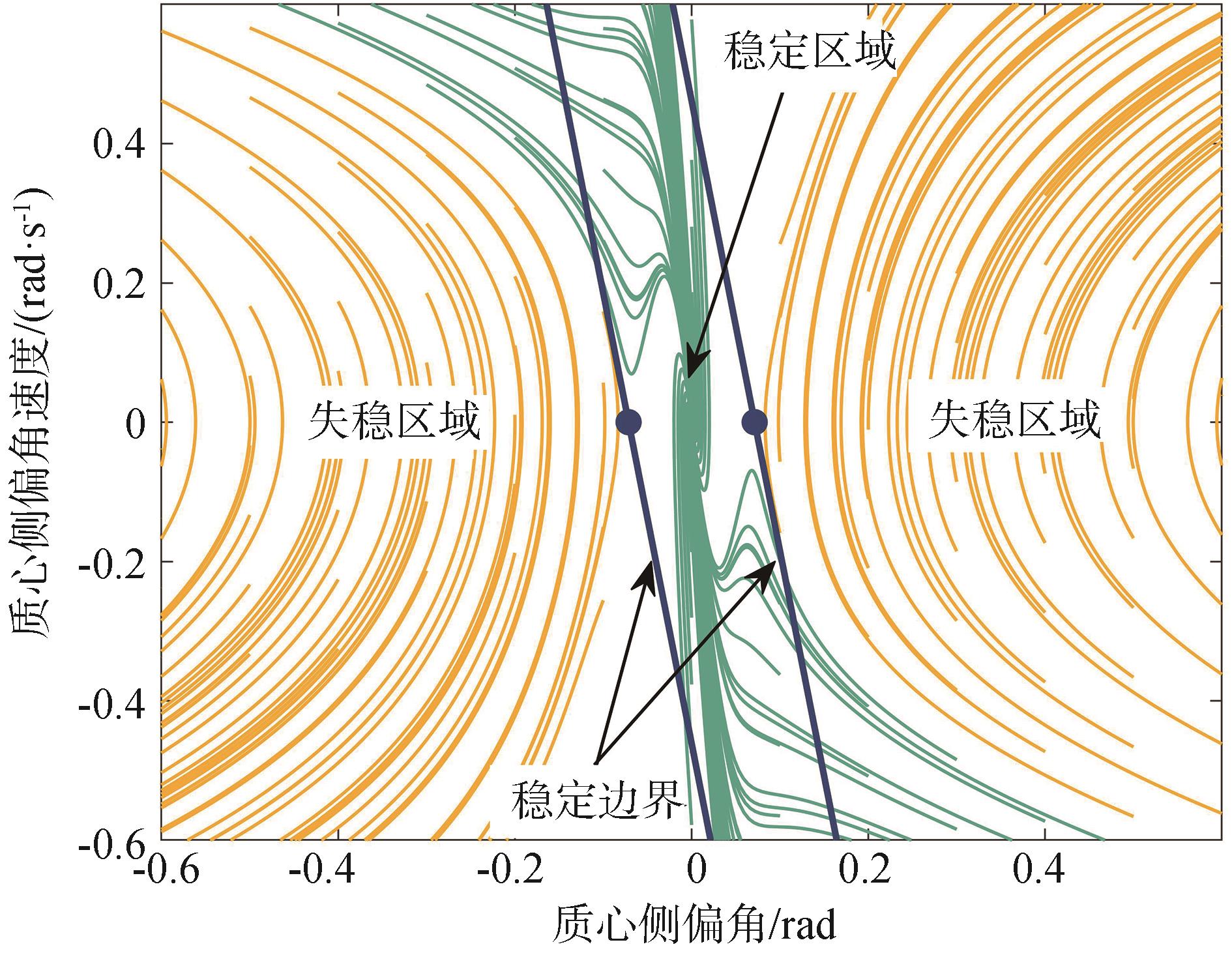
为了提高分布式电驱动车辆在极限工况下的操纵稳定性,本文设计了一种基于临界转角划分区域的主动前轮转向(AFS)和直接横摆力矩控制(DYC)协同控制系统。首先,提出了一种基于临界转角阈值的轮胎状态区域判定方法,将轮胎状态区域划分为线性区域、过渡区域和饱和区域;然后在此基础上分区域分别建立了AFS和DYC控制器,并基于“线性距离系数”实现两种控制器自适应协同控制;接着根据车辆状态所处相平面区域来分配各轮转矩;最后,基于MATLAB/Simulink 和CarSim 联合仿真平台,在蛇行工况和双移线工况下开展了实验验证。结果表明,基于临界转角的判定方法能够准确识别轮胎状态区域,解决了实车中轮胎状态难以直接测量的问题,显著提升了控制器在未知轮胎参数或复杂工况下的适用性,在此基础上所设计的协同控制系统能够有效弥补单一控制器的不足,显著提高了车辆的操纵稳定性,具有一定的工程应用价值。