汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1766-1779.doi: 10.19562/j.chinasae.qcgc.2024.10.005
张海川,王姝( ),赵轩,周辰雨,虢沧岩,周猛
),赵轩,周辰雨,虢沧岩,周猛
收稿日期:2024-03-16
修回日期:2024-04-10
出版日期:2024-10-25
发布日期:2024-10-21
通讯作者:
王姝
E-mail:shuwang@chd.edu.cn
基金资助:
Haichuan Zhang,Shu Wang(),Xuan Zhao,Chenyu Zhou,Cangyan Guo,Meng Zhou
Received:2024-03-16
Revised:2024-04-10
Online:2024-10-25
Published:2024-10-21
Contact:
Shu Wang
E-mail:shuwang@chd.edu.cn
摘要:
为了提高轮毂电机驱动电动汽车的路径跟踪能力和操纵稳定性,本文针对主动四轮转向系统(4WS)和直接横摆力矩控制系统(DYC)提出一种新型的协调控制策略。首先,综合考虑车辆的路径跟踪性能和操纵稳定性,建立一种共享转向控制模型,并在此基础上提出基于非合作Nash博弈的4WS控制策略。其次,为了提高危险行驶工况下的车辆侧向稳定性,基于质心侧偏角相平面将车辆状态划分为稳定区域、过渡区域和失稳区域,并分区域建立DYC控制器。再次,为了实现后轮转向与直接横摆力矩的协同控制,建立基于模糊神经网络的ARS/DYC协调控制器。最后,利用CarSim/Simulink联合仿真平台和硬件在环平台,分别进行双移线工况下的试验验证。研究结果表明,所提出的控制策略能够有效地提高车辆在极端行驶工况下的路径跟踪精度和操纵稳定性能。
张海川,王姝,赵轩,周辰雨,虢沧岩,周猛. 轮毂电机驱动电动汽车4WS和DYC协调控制[J]. 汽车工程, 2024, 46(10): 1766-1779.
Haichuan Zhang,Shu Wang,Xuan Zhao,Chenyu Zhou,Cangyan Guo,Meng Zhou. Coordination Control of 4WS and DYC for in Wheel Motor Driven Electric Vehicle[J]. Automotive Engineering, 2024, 46(10): 1766-1779.

图1
4WS车辆模型"

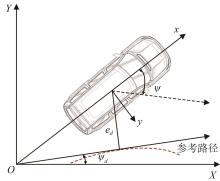
图2
路径跟踪模型"


图3
路径跟踪与操纵稳定性分层协调控制架构"

图4
耦合Riccati方程组计算流程图"
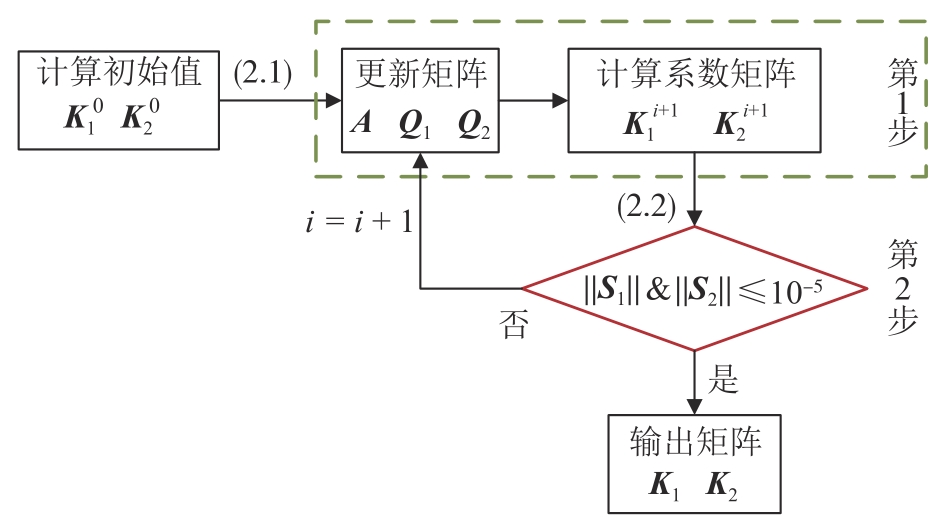

图5
基于β-β˙相平面的DYC控制器结构图"


图6
β-β˙相平面控制区域"

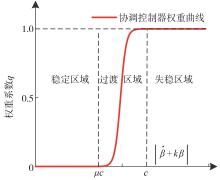
图7
权重系数与相点位置的关系"
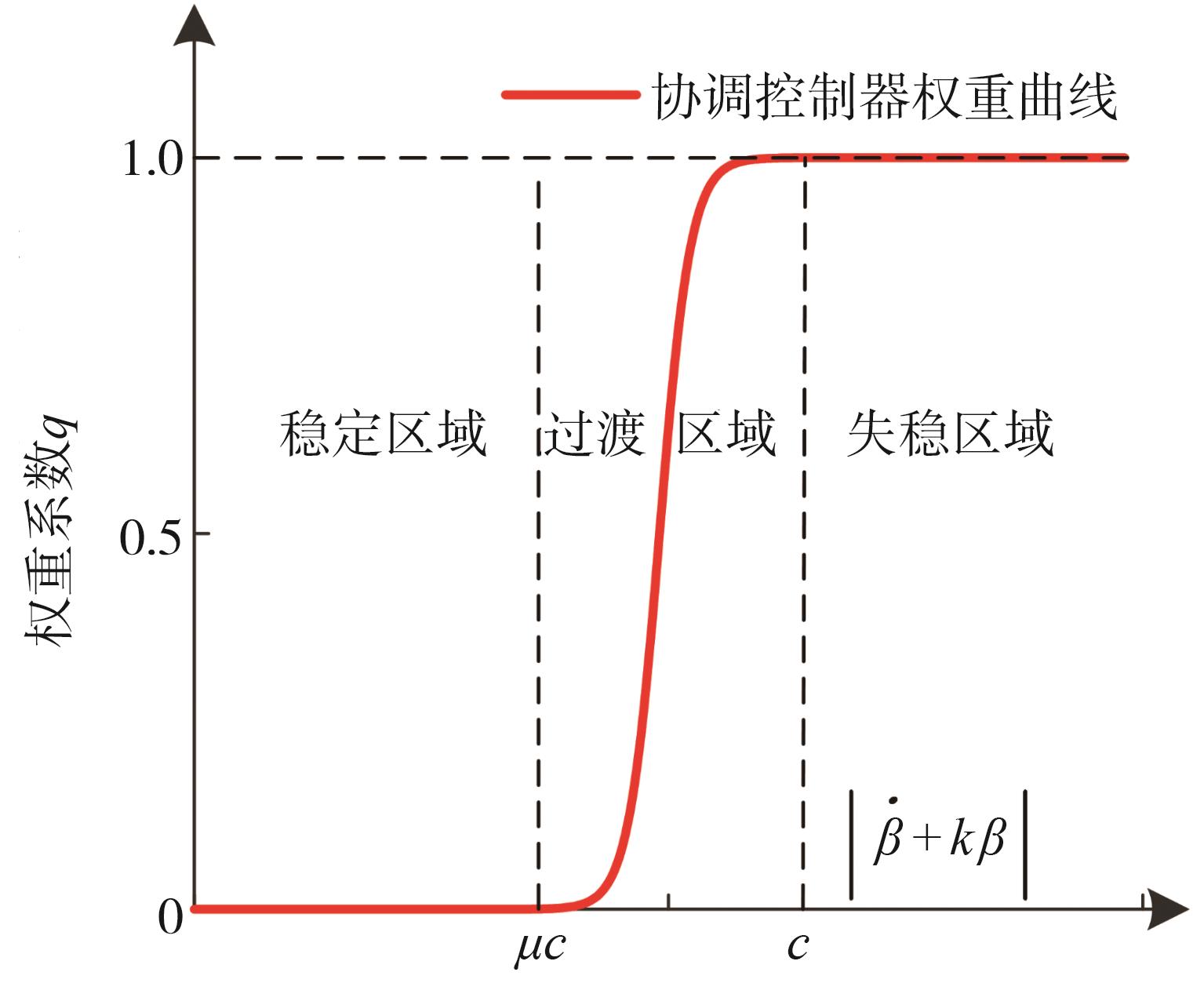

图8
输入隶属度函数"

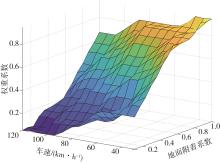
图9
Nash博弈4WS控制器权重系数"
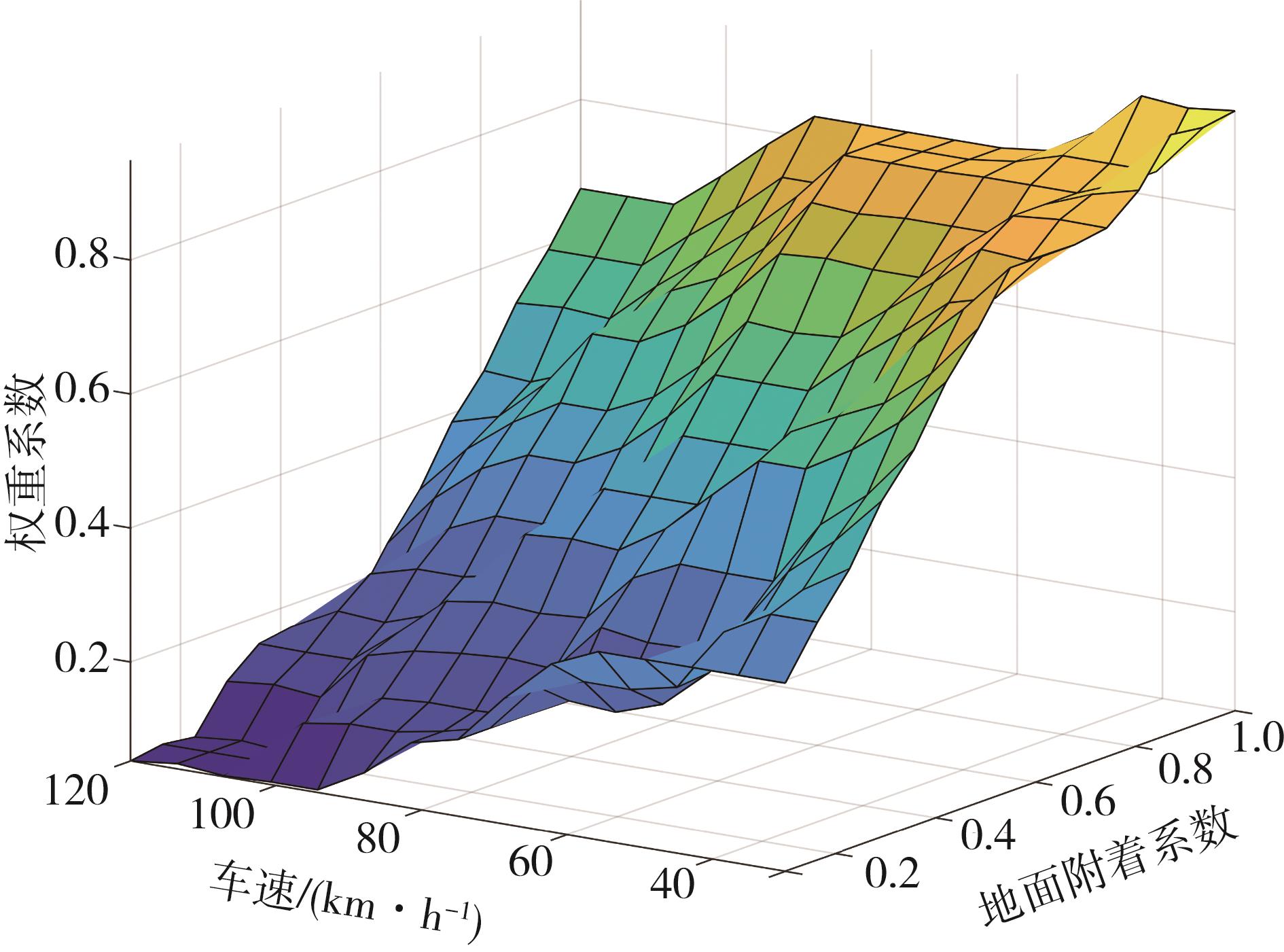
表1
车辆和控制器参数表"
| 符号 | 定义 | 数值 |
|---|---|---|
| 整备质量 | 833 kg | |
| 质心到前轴距离 | 1.1 m | |
| 质心到后轴距离 | 1.25 m | |
| 峰值转矩 | 170 N·m | |
| 峰值功率 | 90 kW | |
| 采样时间 | 0.01 s | |
| 横向位移权重系数 | 10 | |
| 航向角权重系数 | 10 | |
| 质心侧偏角权重系数 | 10 | |
| 横摆角速度权重系数 | 10 | |
| 前轮转角权重系数 | 100(0) | |
| 后轮转角权重系数 | 0(25) |

图10
干燥混凝土路面路径跟踪仿真结果"
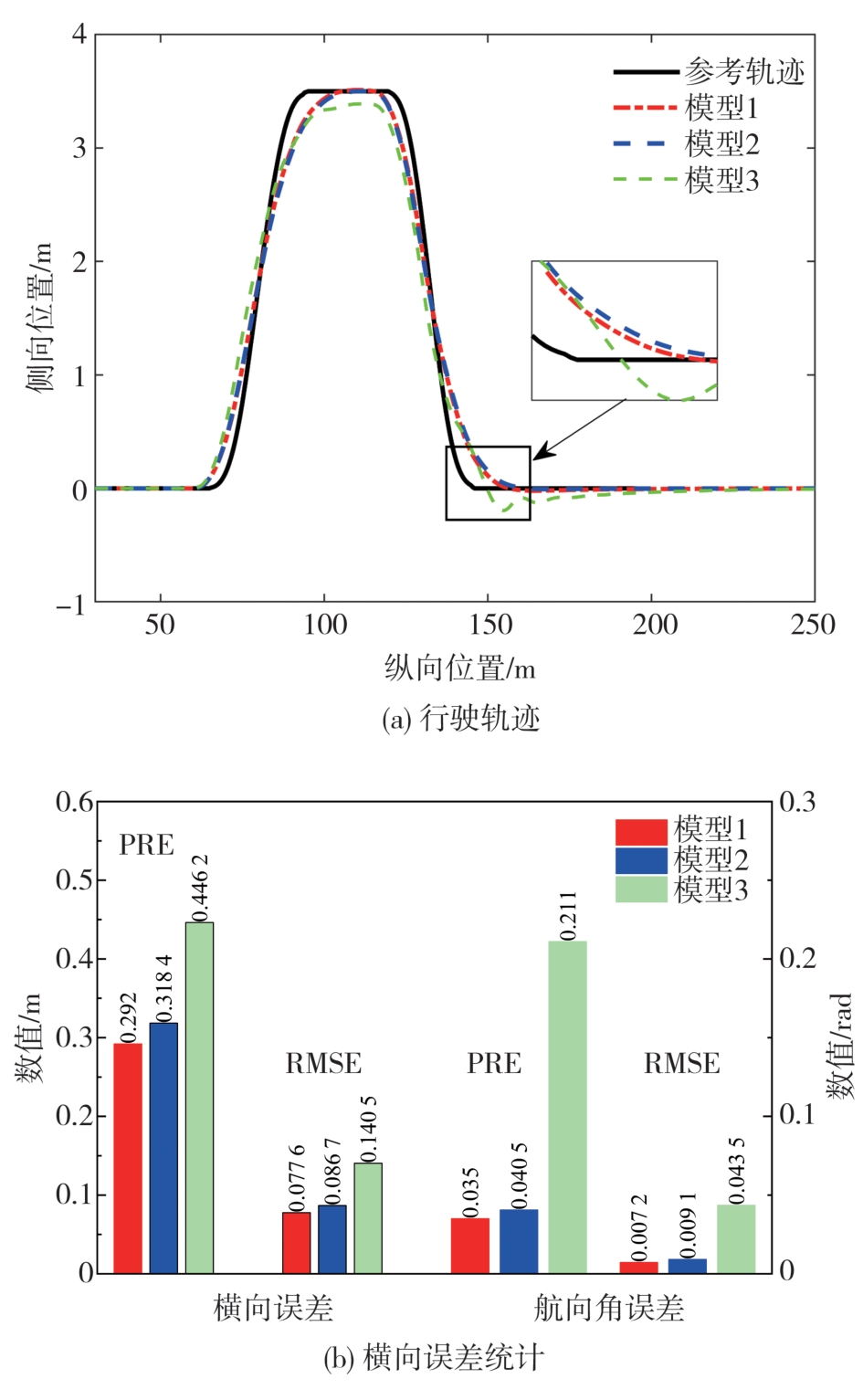

图11
干燥混凝土路面操纵稳定性和控制变量仿真结果"


图12
潮湿沥青路面路径跟踪仿真结果"
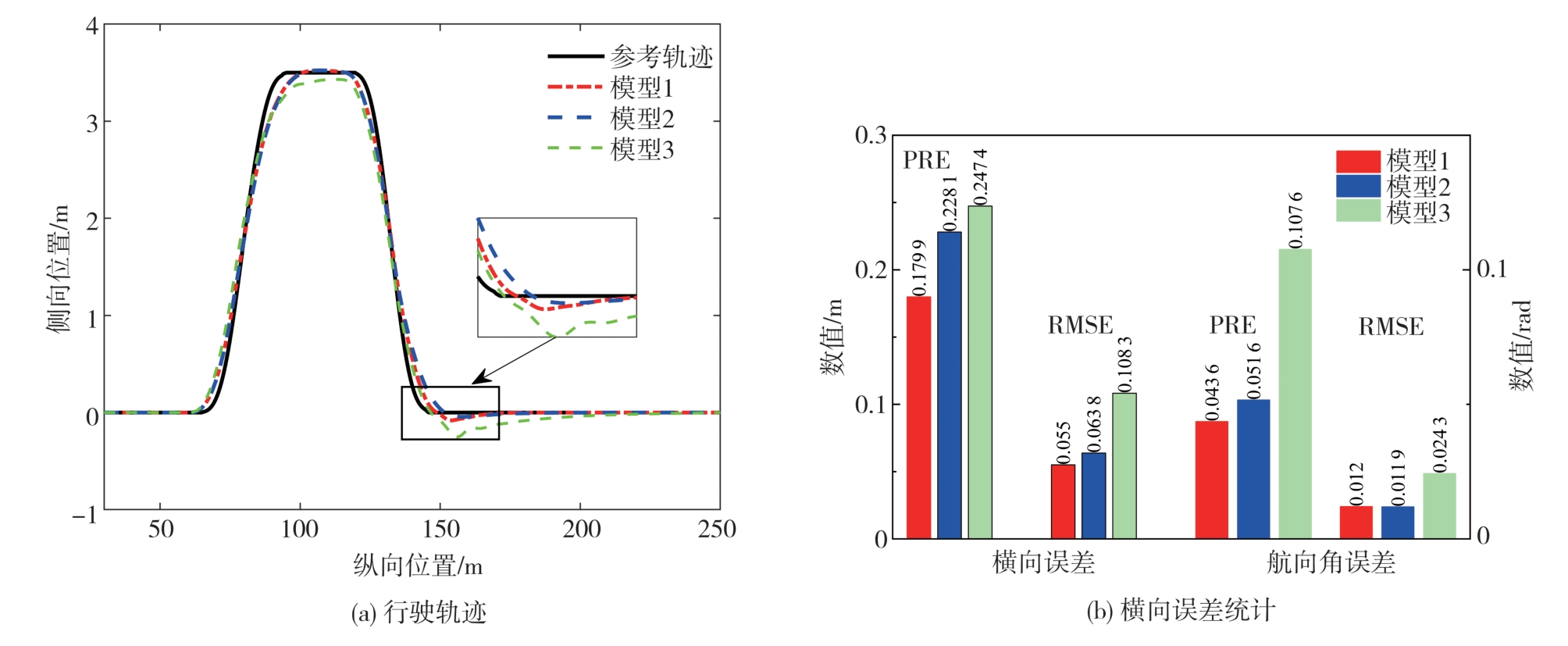

图13
潮湿沥青路面操纵稳定性和控制变量仿真结果"
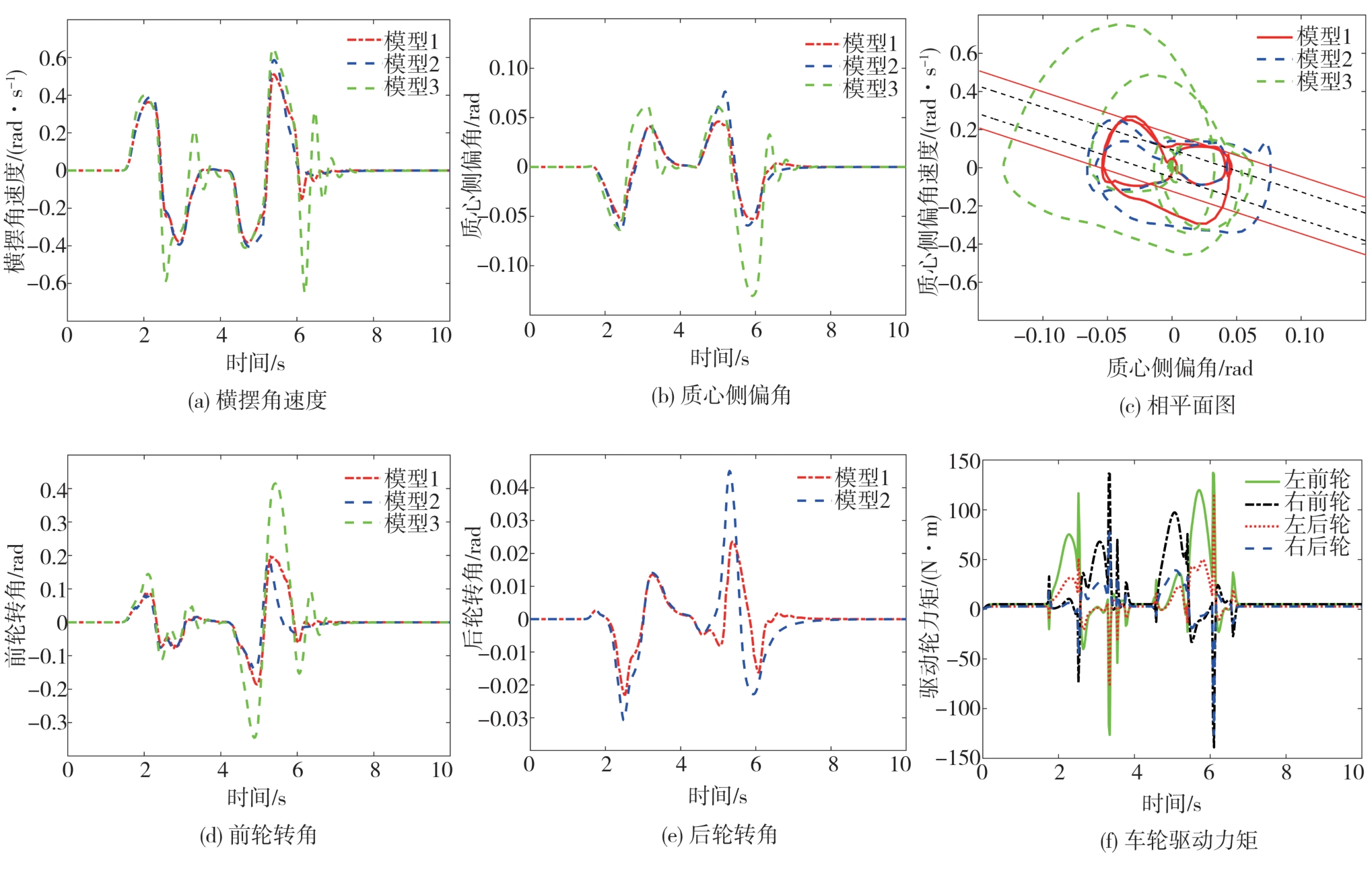
图14
HIL试验验证平台"
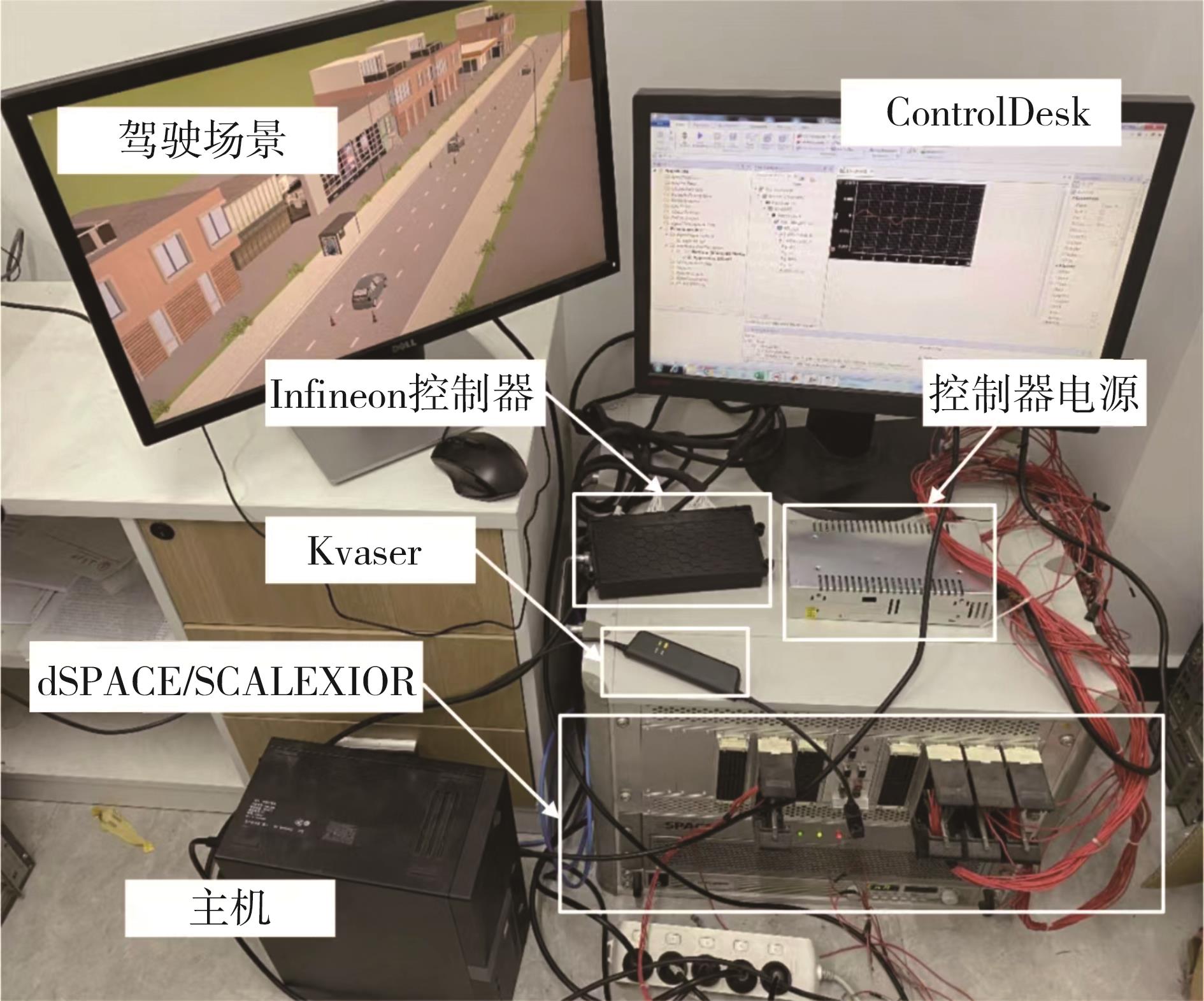
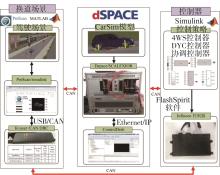
图15
HIL试验平台工作过程"
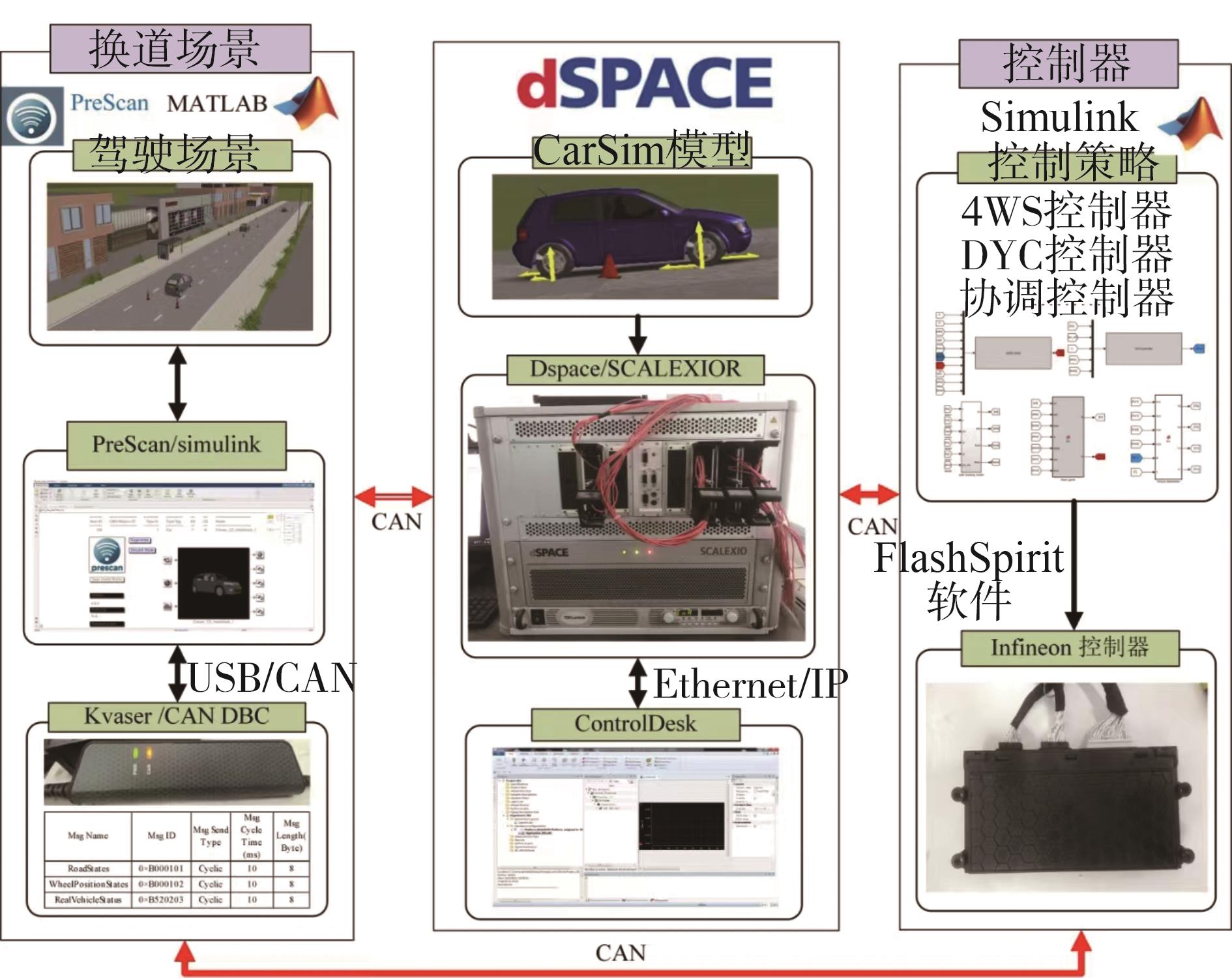

图16
HIL试验路径跟踪结果"
图17
HIL试验操纵稳定性和控制变量结果"

| 1 | HUANG P, XIA X, GHEN G, et al. Active safety control of automated electric vehicles at driving limits: a tube-based MPC approach[J]. IEEE Transactions on Transportation Electrification, 2022, 8(1): 1338-1349. |
| 2 | YUH M M, LI Z, WANG C P, et al. A post impact stability control for four hub-motor independent-drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2022, 71(2): 1384-1396. |
| 3 | 张雷,徐同良,李嗣阳,等.全线控分布式驱动电动汽车底盘协同控制研究综述[J].机械工程学报,2023,59(20):261-280. |
| ZHANG L, XU T L, LI S Y, et al. Overview on chassis coordinated control for full X-by-wire distributed drive electric vehicles[J]. Journal of Mechanical Engineering,2023,59(20):261-280. | |
| 4 | 赵轩,王姝,马建,等.分布式驱动电动汽车底盘集成控制技术综述[J].中国公路学报, 2023,36(4):221-248. |
| ZHAO X, WANG S, MA J, et al. Review of chassis integrated control technology for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2023,36(4):221-248. | |
| 5 | LIANG J H, FENG J W, LU Y B, et al. A direct yaw moment control framework through robust T-S fuzzy approach considering vehicle stability margin[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(1): 166-178. |
| 6 | WU Y, LI B Y, ZHANG N, et al. Rear-steering based decentralized control of four-wheel steering vehicle[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10899-10913. |
| 7 | LIU H, LIU C, HAN L J, et al. Handling and stability integrated control of AFS and DYC for distributed drive electric vehicles based on risk assessment and prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 23148-23163. |
| 8 | CHEN J C, SHUAI Z B, ZHANG H, et al. Path following control of autonomous four-wheel-independent-drive electric vehicles via second-order sliding mode and nonlinear disturbance observer techniques[J]. IEEE Transactions on Industrial Electronics, 2021,68(3):2460-2469. |
| 9 | CHEN Y, CHEN S Z, REN H B, et al. Path tracking and handling stability control strategy with collision avoidance for the autonomous vehicle under extreme conditions[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14602-14617. |
| 10 | CHEN G Y, ZHAO X M, GAO Z H, et al. Dynamic drifting control for general path tracking of autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2527-2537. |
| 11 | 张聪,王振臣,程菊,等.4WIS-4WID车辆横摆稳定性AFS+ARS+DYC滑模控制[J].汽车工程, 2014, 36(3):304-309. |
| ZHANG C, WANG Z C, CHENG J, et al. Sliding mode control of AFS+ARS+DYC for the yaw stability of a 4WIS-4WID vehicle[J]. Automotive Engineering, 2014, 36(3):304-309. | |
| 12 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程, 2019,41(10):1109-1116. |
| CHEN T, CHEN L, XU X, et al. Integrated control of unnamed distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019,41(10):1109-1116. | |
| 13 | 张新荣,谭宇航,贾一帆,等.四轮独立驱动电动汽车路径跟踪鲁棒控制[J].汽车工程, 2023,45(2):253-262,312. |
| ZHANG X R, TAN Y H, JIA Y F, et al. Robust control of path tracking for four-wheel independent drive electric vehicles[J]. Automotive Engineering, 2023,45(2):253-262,312. | |
| 14 | HE Y, CHEN Z, MIAN L, et al. A game theory approach to energy management of an engine-generator/battery/ultracapacitor hybrid energy system[J]. IEEE Transactions on Industrial Electronics, 2016, 63(7): 4266-4277. |
| 15 | NA X X, DAVID J C. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015,45(1): 25-38. |
| 16 | TAMADDONI S H, et al. Optimal preview game theory approach to vehicle stability controller design[J]. Vehicle System Dynamics, 2011, 49(12):1967-1979. |
| 17 | WU H L, LI Y S. Coordination control of path tracking and stability for 4WS autonomous vehicle[C]. 2020 5th International Conference on Electromechanical Control Technology and Transportation, Nanchang, China, 2020:343-348. |
| 18 | ZHENG Z C, ZHAO X, WANG S, et al. Extension coordinated control of distributed-driven electric vehicles based on evolutionary game theory[J]. Control Engineering Practice, 2023, 105583: 1-15. |
| 19 | 张立伟,刘晋琦,张孟磊,等. 现代无轨列车横摆稳定控制策略[J].交通运输工程学报, 2023,23(2): 240-250. |
| ZHANG L W, LIU J Q, ZHANG M L, et al. Yaw stability control strategy of modern trackless train[J]. Journal of Traffic and Transportation Engineering, 2023,23(2): 240-250. | |
| 20 | 贺伊琳,马建,杨舒凯,等. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J].汽车工程, 2023, 45(5): 719-734. |
| HE Y L, MA J, YANG S K, et al. Research on stability model predictive control of intelligent electric vehicle with preview characteristics[J]. Automotive Engineering, 2023, 45(5): 719-734. | |
| 21 | 林程,梁晟,宫新乐,等.面向极限工况的分布式驱动电动汽车动力学集成控制方法[J].汽车工程, 2022,44(9): 1372-1385. |
| LIN C, LING S, GONG X L, et al. Integrated dynamic control strategy for extreme maneuvers of 4WIDEVs[J]. Automotive Engineering, 2022,44(9): 1372-1385. | |
| 22 | 宗长富,郑宏宇,田承伟,等.基于直接横摆力矩控制的汽车稳定性控制策略[J].吉林大学学报(工学版), 2008(5):1010-1014. |
| ZONG C F, ZHENG H Y, TIAN C W, et al. Vehicle stability control strategy based on direct yaw moment control[J]. Journal of Jilin University (Engineering and Technology Edition), 2008(5):1010-1014. | |
| 23 | GUO H Y, LIU F, XU F, et al. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019,49(1): 1-13. |
| 24 | GUO N Y, BASILIO L, ZHANG X D, et al. A real-time nonlinear model predictive controller for yaw motion optimization of distributed drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69(5): 4935-4946. |
| 25 | 彭文正,敖银辉,邹晨祺. 主动后轮转向及分布式驱动车辆协同控制研究[J].机械科学与技术,2020,39(2):207-213. |
| PENG W Z, AO Y H, ZOU C Q. Cooperative control for distributed drive vehicle and active rear wheel steering[J]. Mechanical Science and Technology for Aerospace Engineering, 2020,39(2):207-213. | |
| 26 | WANG Q W, ZHAO Y Q, DENG Y J, et al. Optimal coordinated control of ARS and DYC for four-wheel steer and in-wheel motor drive electric vehicle with unknown tire model[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (10):10809-10819. |
| 27 | CHENG S, LI L, LU C Z, et al. Robust LMI-based H-Infinite controller integrating AFS and DYC of autonomous vehicles with parametric uncertainties[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021,51(11): 6901-6910. |
| 28 | 李子先,潘世举,徐友春.8轮分布式电驱动车辆AFS和DYC协同控制[J].汽车工程,2023,45(3):409-420. |
| LI Z X, PAN S J, XU Y C. Coordinated control of AFS and DYC for 8-wheel distributed electric drive vehicle[J]. Automotive Engineering, 2023,45(3):409-420. | |
| 29 | AHMADIAN N, KHOSRAVI A, SARHADI P. Integrated model reference adaptive control to coordinate active front steering and direct yaw moment control[J]. ISA Transactions, 2020,106: 85-96. |
| 30 | 王姝,赵轩,余强,等. 基于驾驶人转向意图的双电机驱动电动汽车稳定性控制策略研究[J].中国公路学报, 2022,35(1):334-349. |
| WANG S, ZHAO X, YU Q, et al. Research on vehicle stability control strategy for dual-motor drive electric vehicle considering driver steering intention[J]. China Journal of Highway and Transport, 2022,35(1):334-349. |
| [1] | 赵树恩,王盛,冷姚. 智能汽车轨迹跟踪多目标显式模型预测控制[J]. 汽车工程, 2024, 46(5): 784-794. |
| [2] | 傅耀宇, 周二振, 丁瑞阳, 周云波, 付条奇, 张明. 某车辆滚翻过程中乘员颈部动态响应[J]. 汽车工程, 2023, 45(7): 1276-1285. |
| [3] | 赵霞,李朝,付锐,葛振振,王畅. 基于深度卷积-Tokens降维优化视觉Transformer的分心驾驶行为实时检测[J]. 汽车工程, 2023, 45(6): 974-988. |
| [4] | 金立生,纪丙东,郭柏苍. 基于多层时空融合网络的驾驶人注意力预测[J]. 汽车工程, 2023, 45(5): 759-767. |
| [5] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [6] | 张佩,孙文新,胡杰,颜伏伍,徐骞,闫涛卫. 四轮转向车辆后轮转角控制方法研究[J]. 汽车工程, 2023, 45(12): 2242-2250. |
| [7] | 史培龙,赵轩,陈子童,余强. 基于道路行驶工况辨识的重型载货汽车排气制动系统主动控制研究[J]. 汽车工程, 2023, 45(1): 104-111. |
| [8] | 徐璞磊,蔡英凤,廉玉波,孙晓强,王海,陈龙,钟益林. 基于改进分层可拓理论的智能汽车AFS/DYC协调控制[J]. 汽车工程, 2023, 45(1): 20-31. |
| [9] | 施德华,容香伟,汪少华,张开美,陈龙,李春. 双离合器协同的功率分流式混合动力汽车动态协调优化控制研究[J]. 汽车工程, 2022, 44(12): 1877-1888. |
| [10] | 陈路明,廖自力,张征. 多轮分布式电驱动车辆双重转向分层控制系统设计[J]. 汽车工程, 2021, 43(9): 1383-1393. |
| [11] | 王军年,刘鹏,杨钫,靳立强,付铁军. 轮毂电机驱动电动汽车双横臂前悬架运动学优化[J]. 汽车工程, 2021, 43(3): 305-312. |
| [12] | 彭志召,危银涛,傅晓为,姚谢钧. 磁流变半主动悬架研究及实车试验分析[J]. 汽车工程, 2021, 43(2): 269-277. |
| [13] | 邹铁方, 王冠, 胡林, 武和全. 汽车摩托车碰撞事故中骑乘人员损伤差异对比研究*[J]. 汽车工程, 2020, 42(5): 621-627. |
| [14] | 蔡英凤, 窦磊, 陈龙, 施德华, 汪少华, 朱镇. 基于补偿滑模控制的混合动力汽车协调控制*[J]. 汽车工程, 2020, 42(4): 431-438. |
| [15] | 杨秀建, 李金雨. 基于非线性模型预测控制的车辆纵向队列协调控制*[J]. 汽车工程, 2020, 42(2): 184-190. |
|