汽车工程 ›› 2022, Vol. 44 ›› Issue (2): 199-207.doi: 10.19562/j.chinasae.qcgc.2022.02.006
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
牛国臣( ),冯宁,王瑜
),冯宁,王瑜
Guochen Niu(),Ning Feng,Yu Wang
摘要:
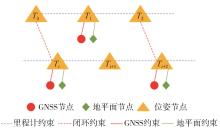
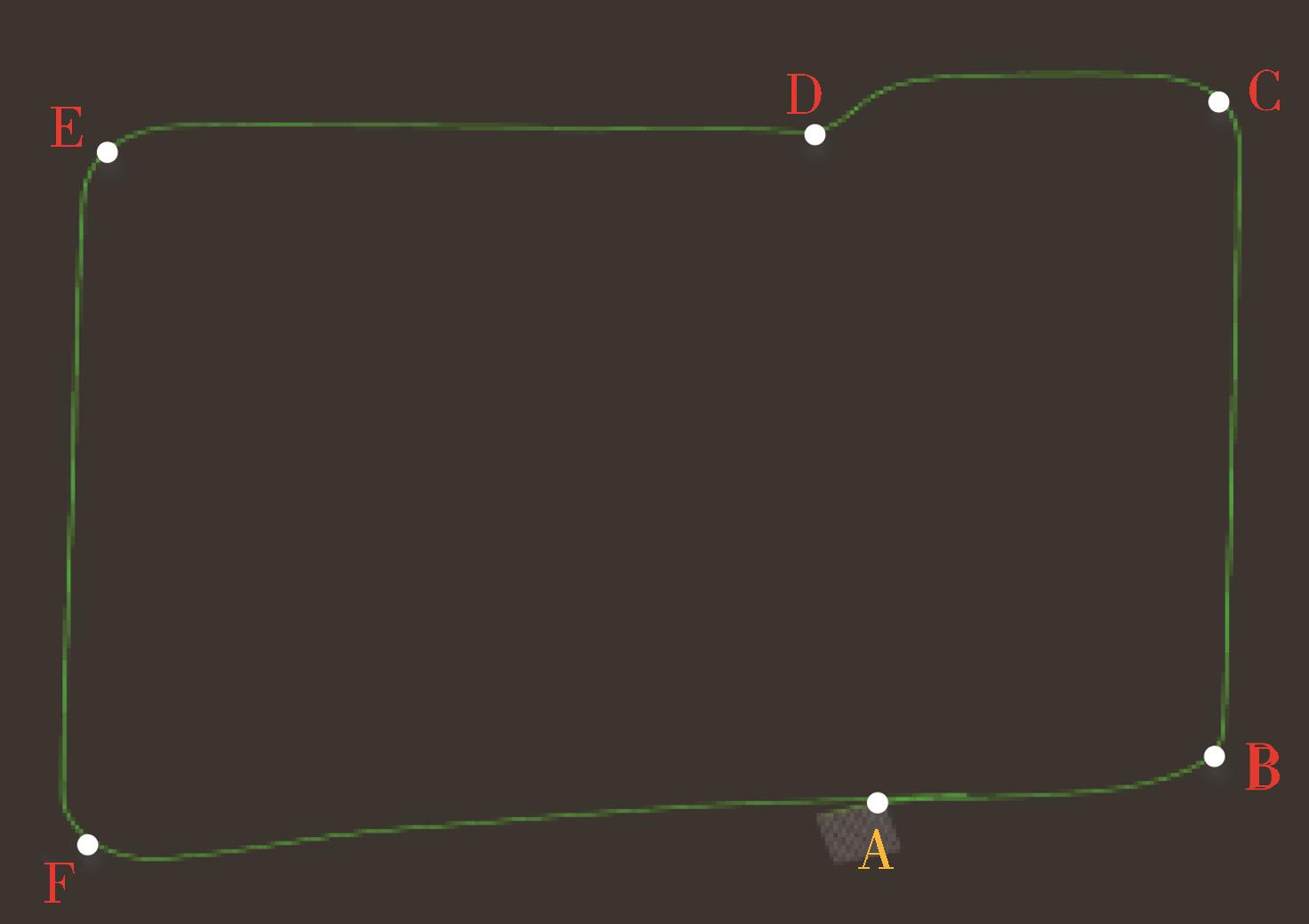
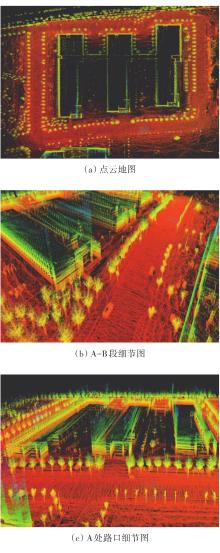
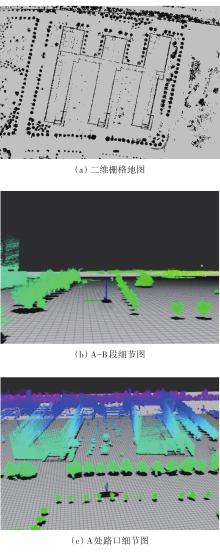
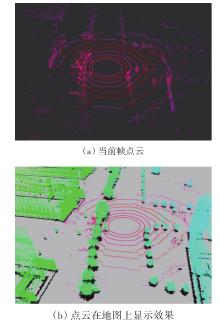
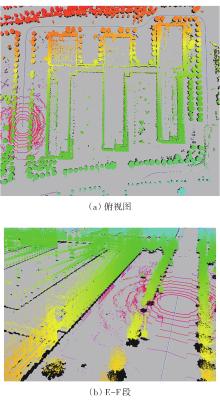
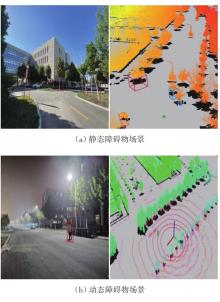
地图构建是实现无人驾驶的重要前提,针对传统单一地图无法准确实现无人车自主导航的问题,本文中提出一种低成本的室外多图层地图,分轨迹层-静态层-动态层。轨迹层为GNSS拓扑地图,静态层为基于图优化构建的点云-栅格地图,动态层为实时激光点云信息。首先轨迹层的绝对位置信息用于实现无人车的全局路径规划,然后基于动态层实时信息与静态层的点云地图做匹配,完成无人车实时高精度定位,最后对动态层进行障碍物检测,通过将实时障碍物信息同静态层的栅格地图结合,为无人车避障和局部路径规划提供环境信息。在实际环境下对提出的地图进行了评估,验证了该地图的可用性。