汽车工程 ›› 2023, Vol. 45 ›› Issue (6): 997-1009.doi: 10.19562/j.chinasae.qcgc.2023.06.010
所属专题: 底盘&动力学&整车性能专题2023年
余颖弘1,2,黄利1,李以农2( ),郑玲2,周佳1,梁艺潇2
),郑玲2,周佳1,梁艺潇2
收稿日期:2022-11-14
出版日期:2023-06-25
发布日期:2023-06-16
通讯作者:
李以农
E-mail:ynli@cqu.edu.cn
基金资助:
Yinghong Yu1,2,Li Huang1,Yinong Li2(),Ling Zheng2,Jia Zhou1,Yixiao Liang2
Received:2022-11-14
Online:2023-06-25
Published:2023-06-16
Contact:
Yinong Li
E-mail:ynli@cqu.edu.cn
摘要:
针对紧急工况下车辆纵横向动力学耦合导致传统轨迹跟踪方法精度下降的问题,提出解耦循迹跟踪算法,该算法在利用动力学解耦消减耦合负效应的基础上,通过跟踪车辆目标运动状态实现运动轨迹的间接跟踪。首先,基于理论推导与仿真,探究了车辆纵横向动力学耦合成因及其对循迹跟踪精度的影响;然后,通过修正传统3自由度车辆动力学逆系统构型确定其接口,利用随机数据集训练反馈前向神经网络(BPNN)模型以获取车辆平面运动逆系统;最后,设计基于目标运动轨迹的目标运动状态逆解算模型与基于纯跟踪思想的目标轨迹修正模型,将逆系统解耦方法应用于长航程循迹跟踪任务中。仿真与实验结果说明解耦循迹跟踪作为一种全新的跟踪方法,不仅可以完成跟踪任务,且通过与传统循迹跟踪方法对比,在耦合工况下所提出的方法具备更高的跟踪精度。
余颖弘,黄利,李以农,郑玲,周佳,梁艺潇. 基于动力学解耦的紧急工况循迹跟踪控制研究[J]. 汽车工程, 2023, 45(6): 997-1009.
Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling[J]. Automotive Engineering, 2023, 45(6): 997-1009.
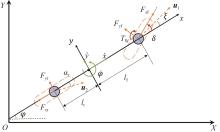
图1
3自由度车辆动力学参考模型"
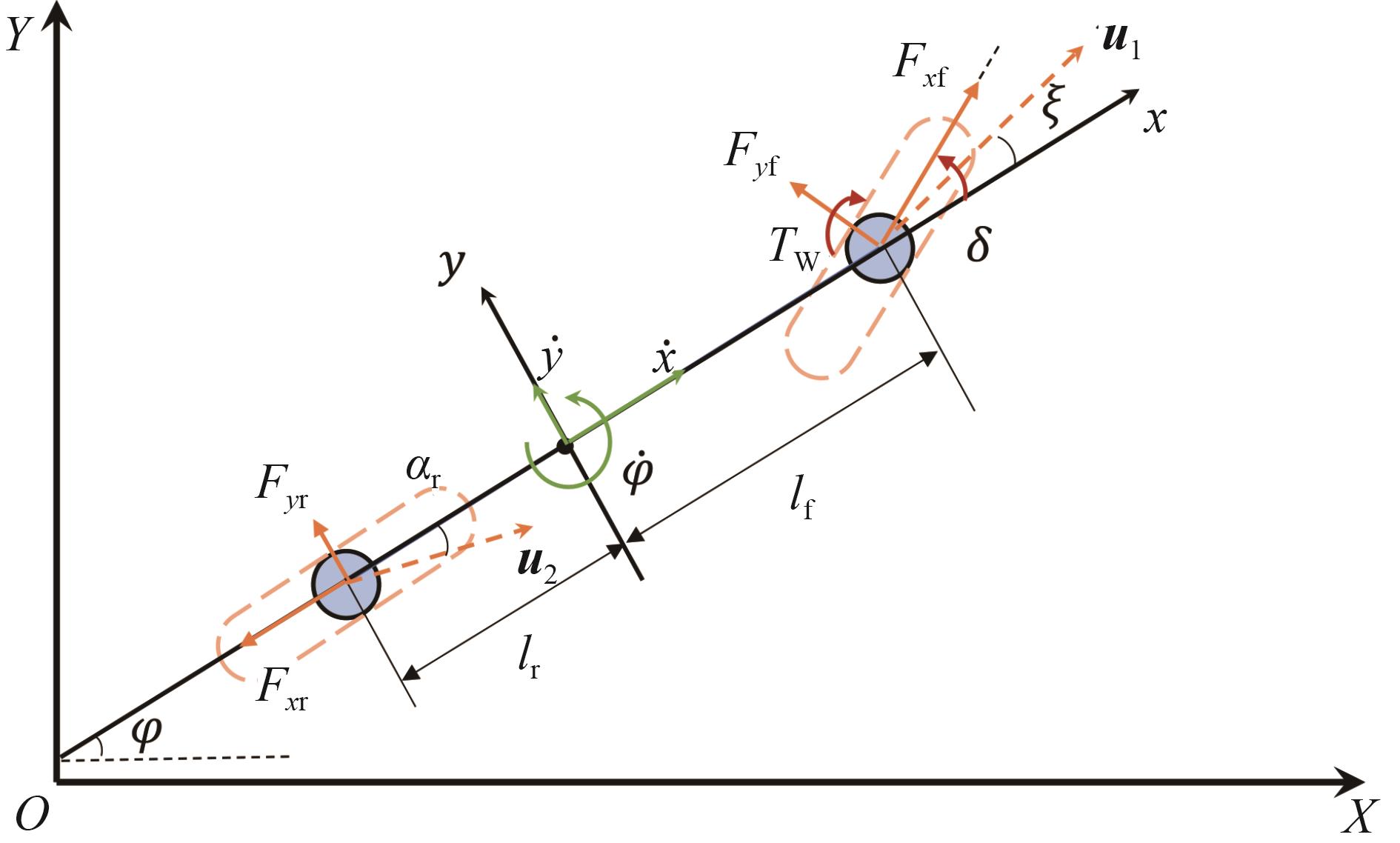

图2
设计的耦合工况簇"

图3
运动跟踪情况统计"

图4
逆系统解耦原理图"
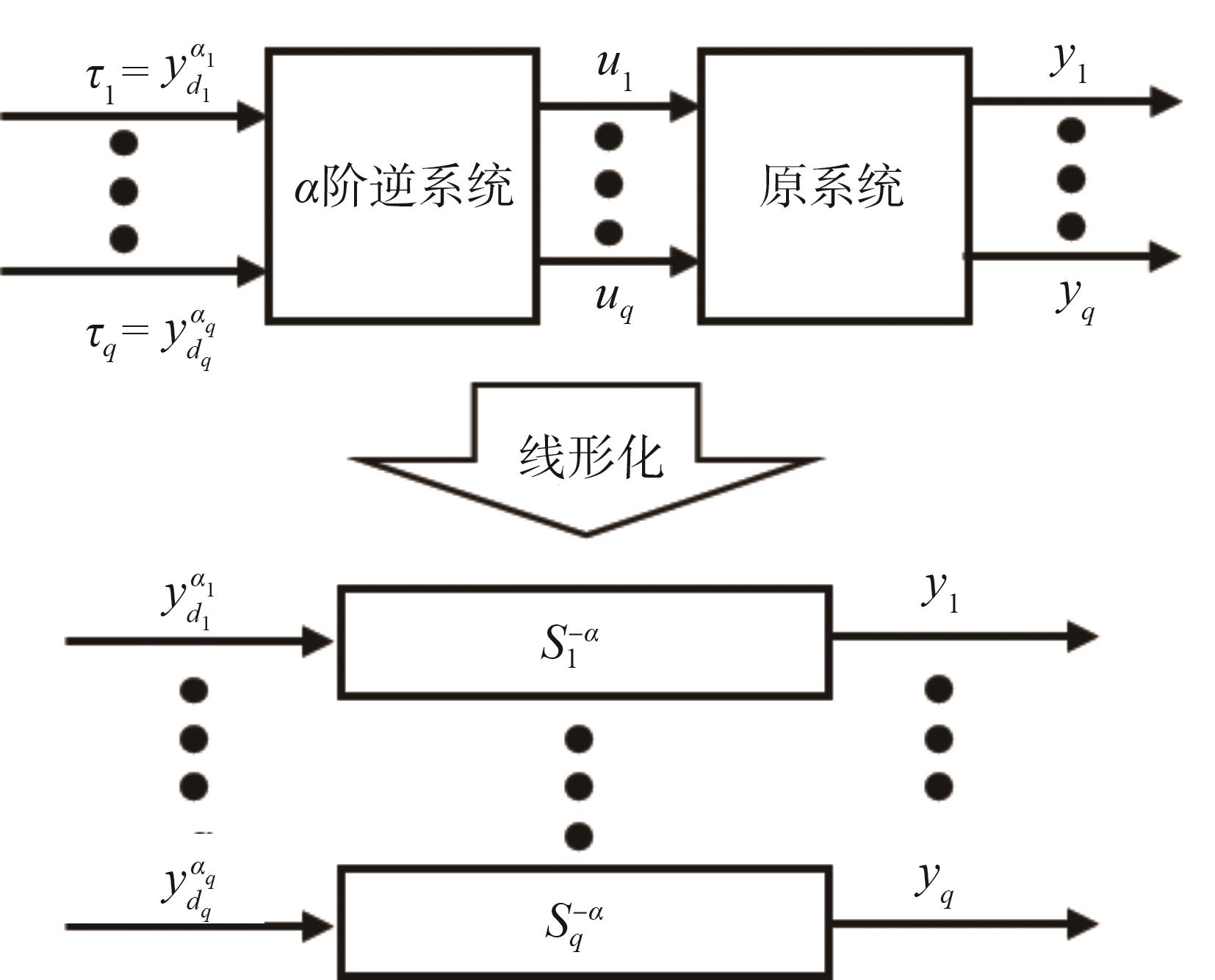
图5
3自由度车辆逆系统构型改造"
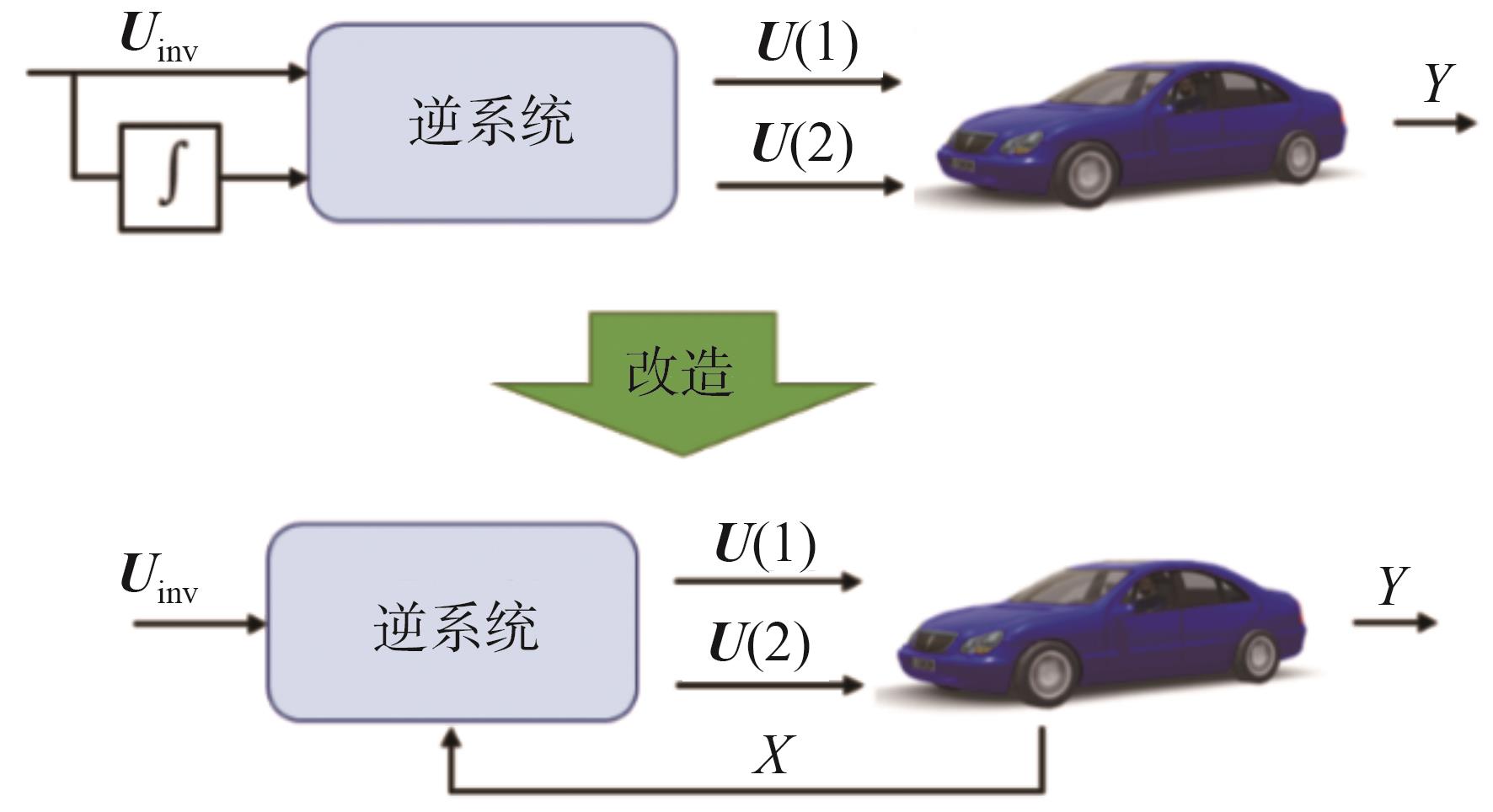

图6
BPNN训练集数据获取与训练框架"
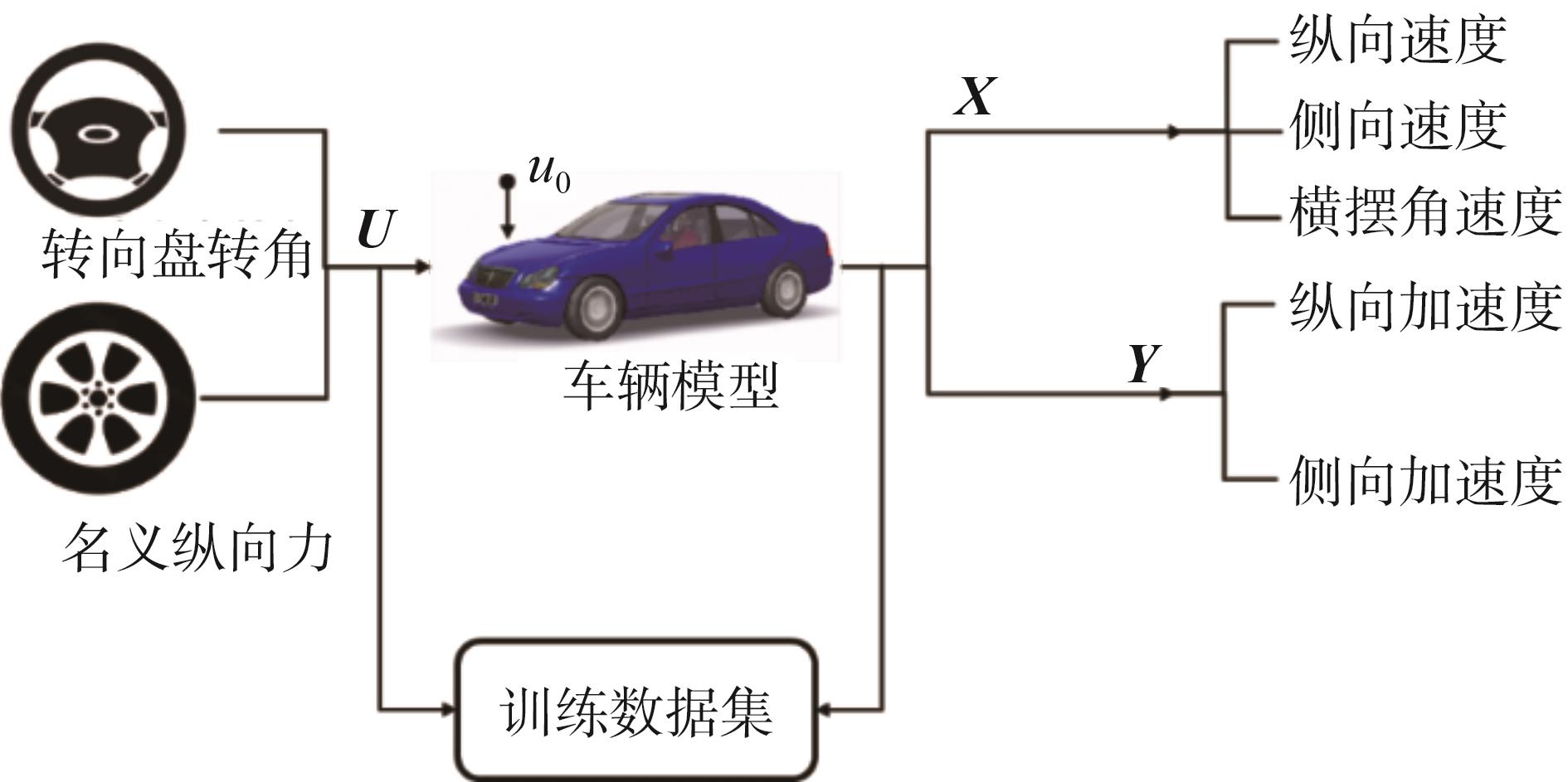

图7
训练集的随机输入"
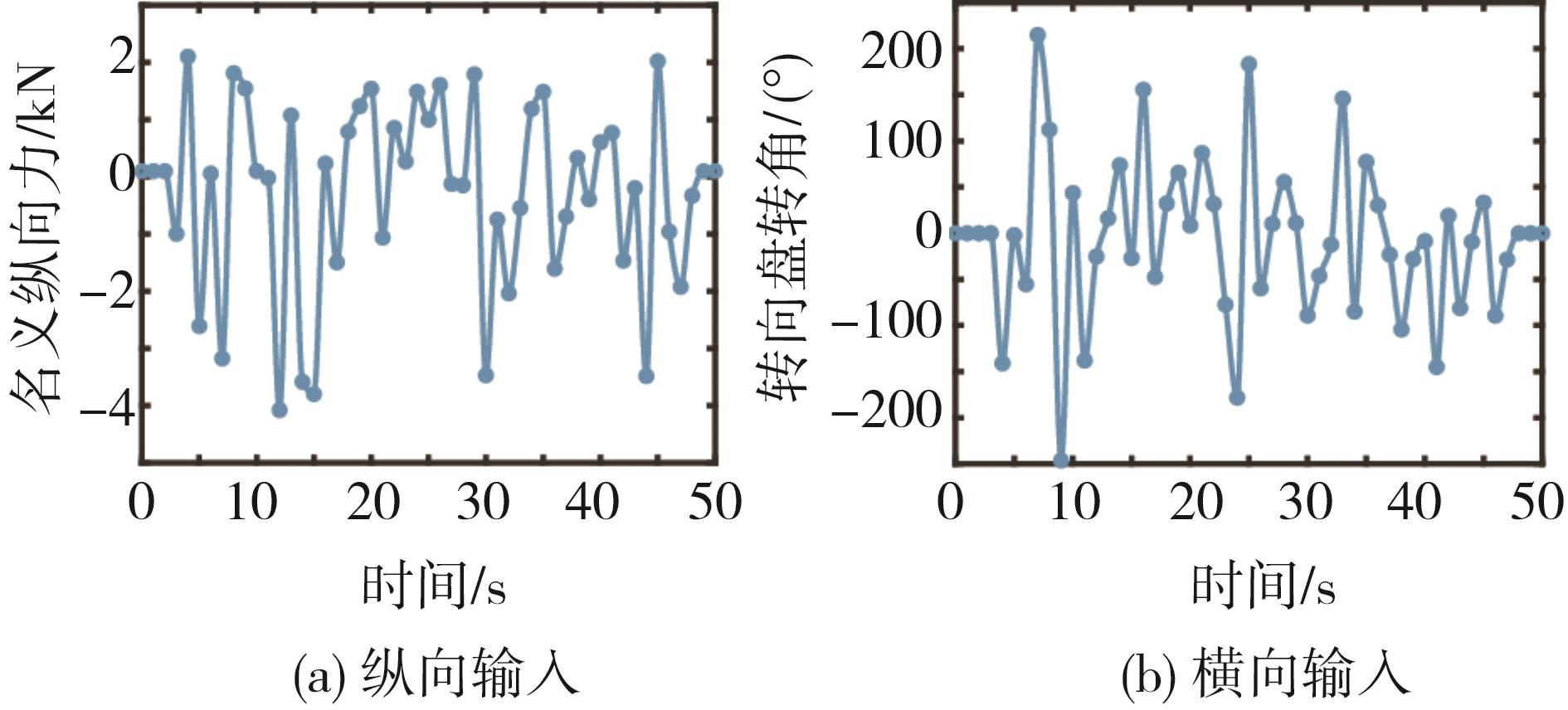

图8
BPNN训练效果图"
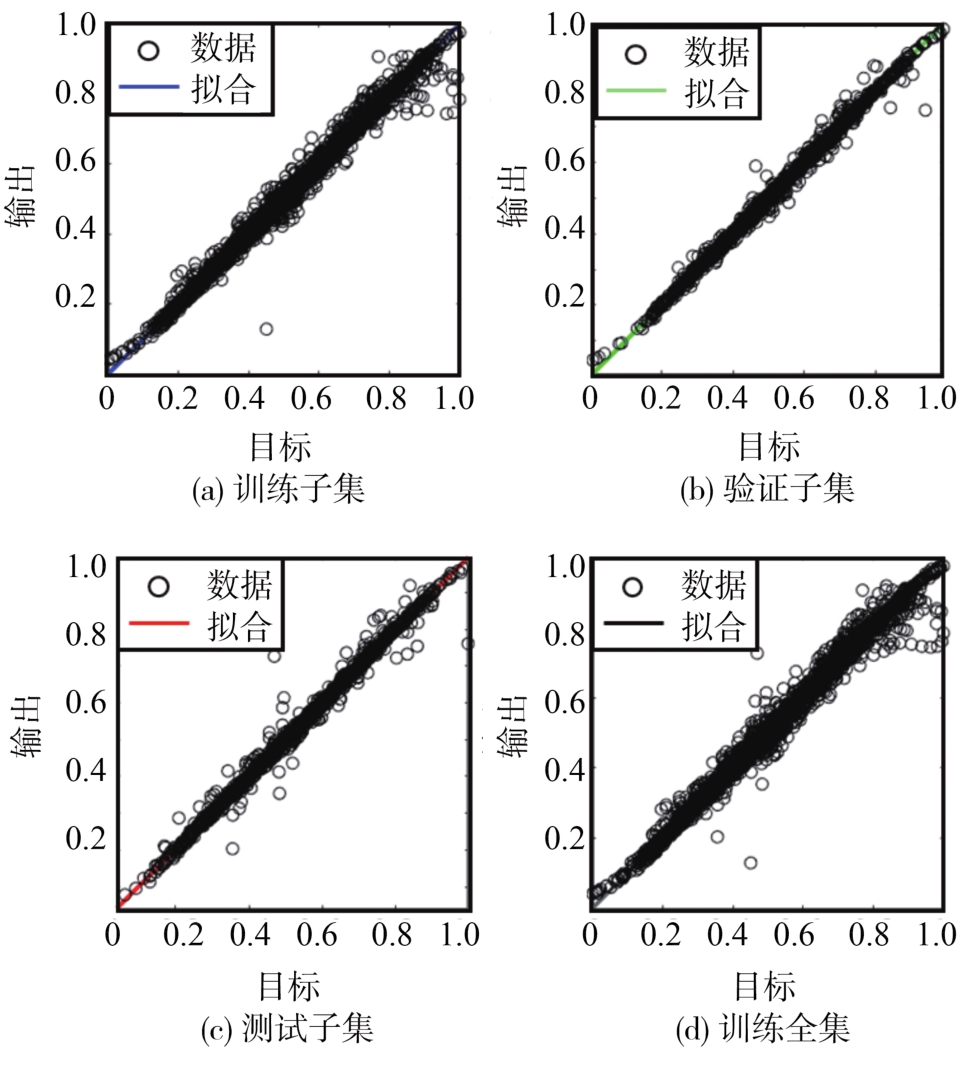

图9
解耦验证流程图"

图10
纵横向解耦效果"
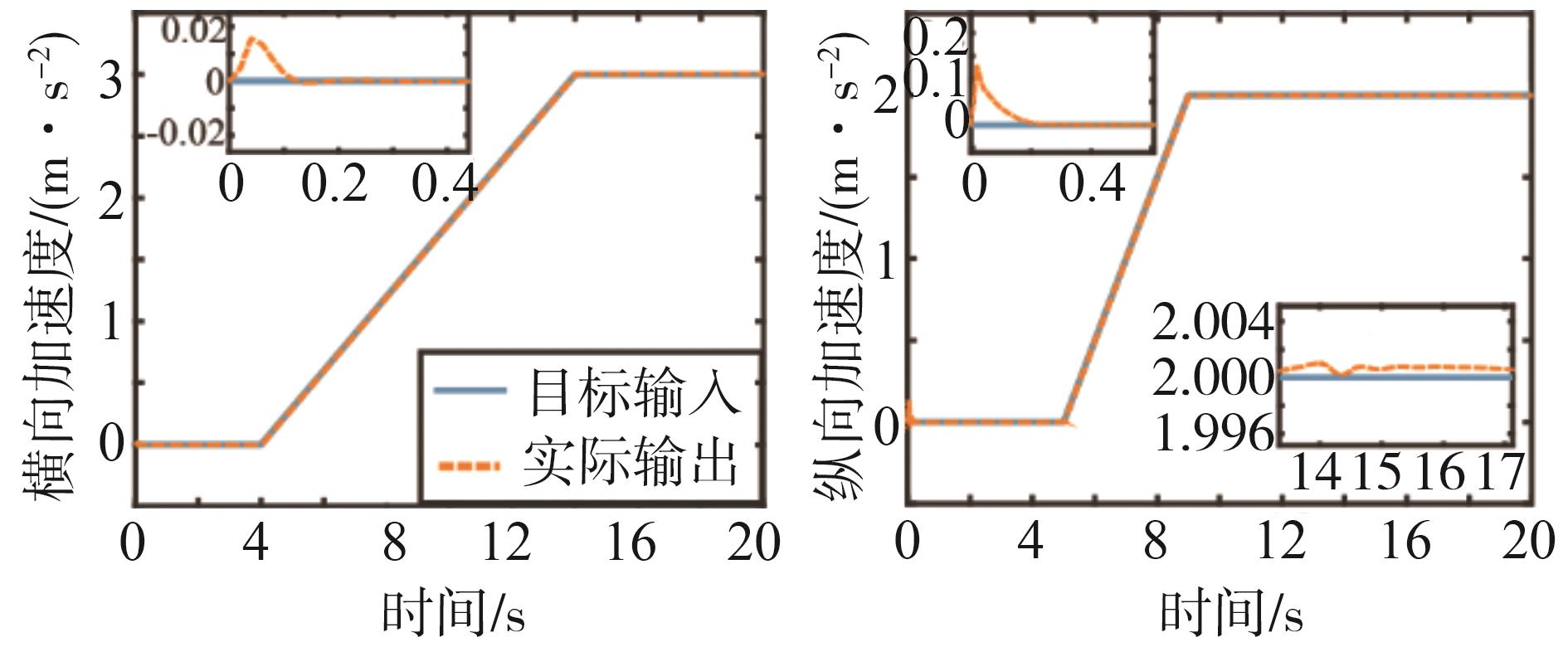

图11
目标轨迹修正示意图"
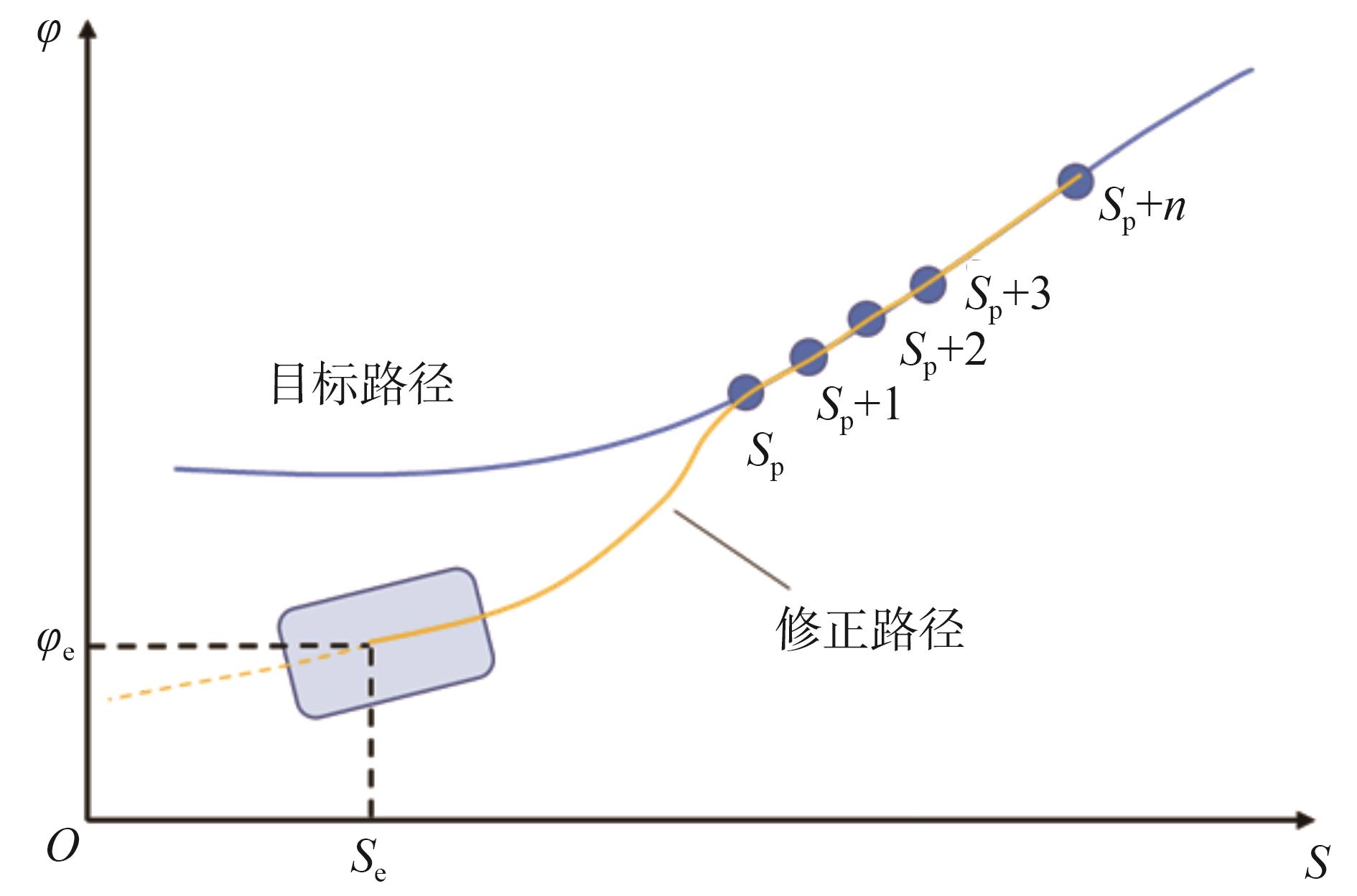

图12
解耦循迹跟踪算法信号流图"
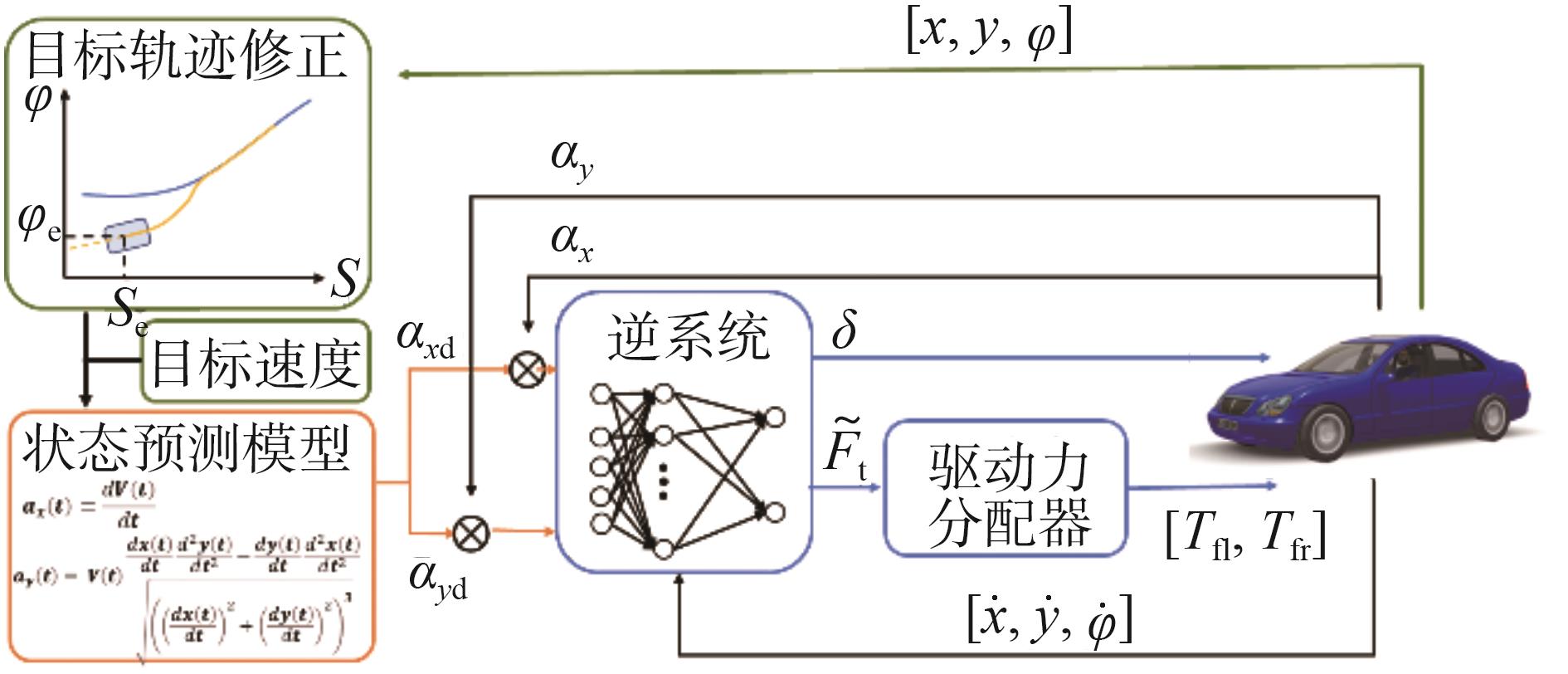
表1
车辆模型参数"
| 参数 | 数值 |
|---|---|
| 整车质量 | 1 370 kg |
| 质心至前轴的距离 | 1.11 m |
| 质心至后轴的距离 | 1.67 m |
| 空气阻力系数 | 0.35 |
| 前轴等效转向刚度 | 67 553 N·m/rad |
| 后轴等效转向刚度 | 49 506 N·m/rad |
| 横摆转动惯量 | 2 315.3 kg/m2 |

图13
目标车辆状态预测与跟踪结果"
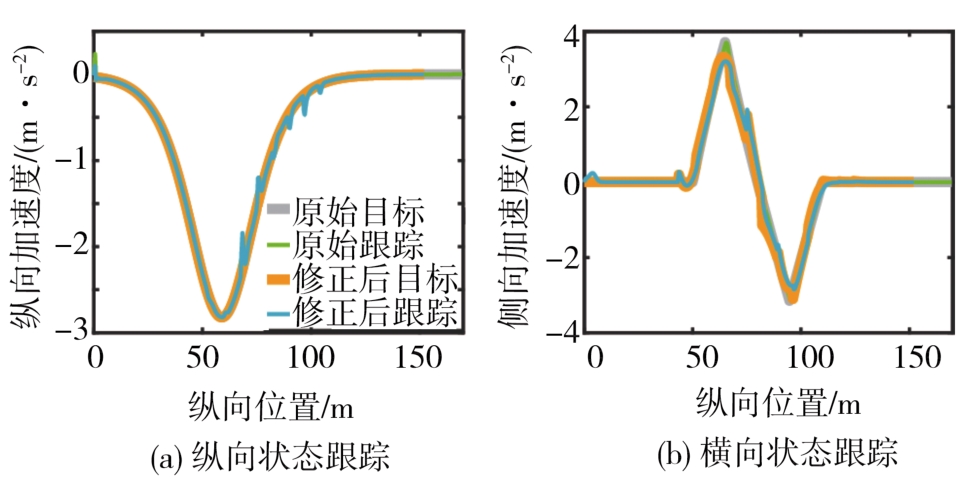

图14
定周期的目标路径修正结果"


图15
目标运动轨迹跟踪结果"
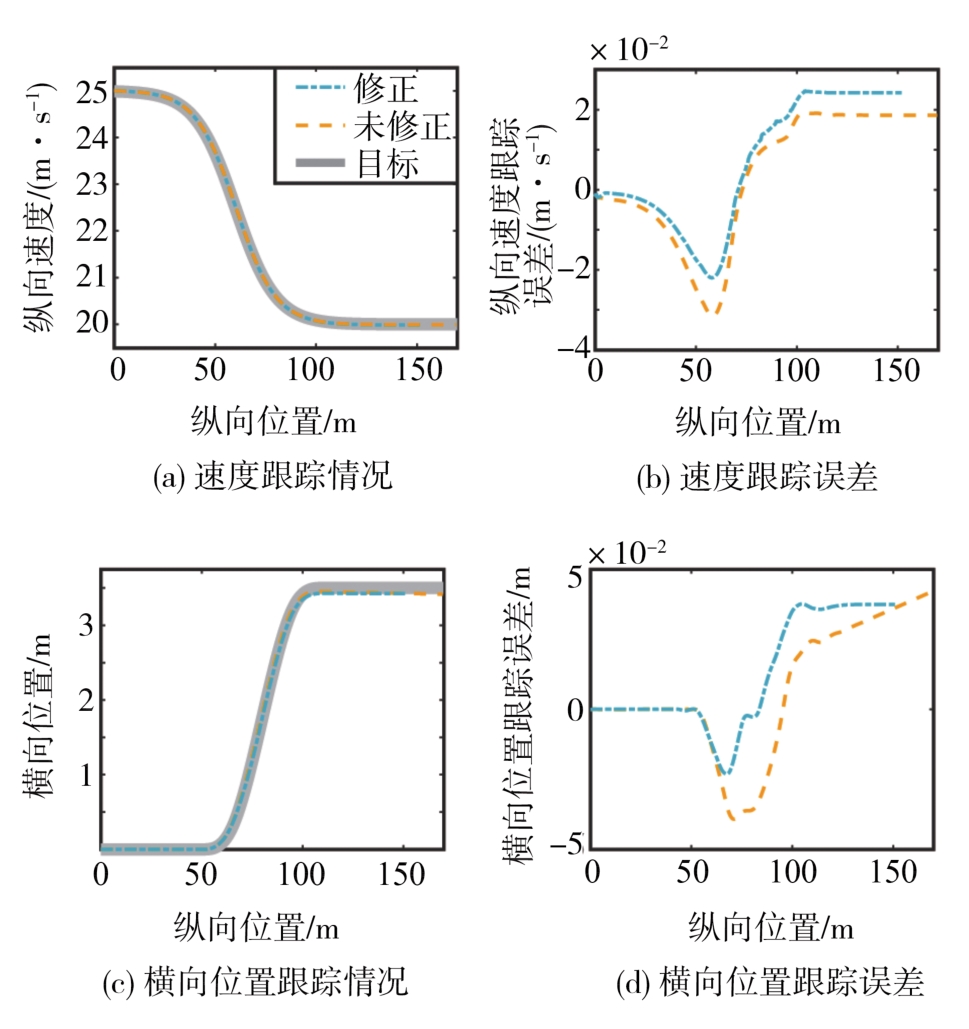

图16
变速双移线目标运动轨迹跟踪结果"

表2
横向跟踪指标汇总"
| 控制器 | 最大误差/ | 最小误差/ | 均方误差/ |
|---|---|---|---|
| 解耦循迹跟踪 | 0.029 8 | -0.030 6 | 0.000 3 |
| 集成式MPC | 0.085 4 | -0.102 4 | 0.001 4 |
| 协同式纯跟踪 | 0.038 5 | -0.022 2 | 0.000 1 |

图17
实验车辆"


图18
实车目标运动轨迹跟踪结果图"
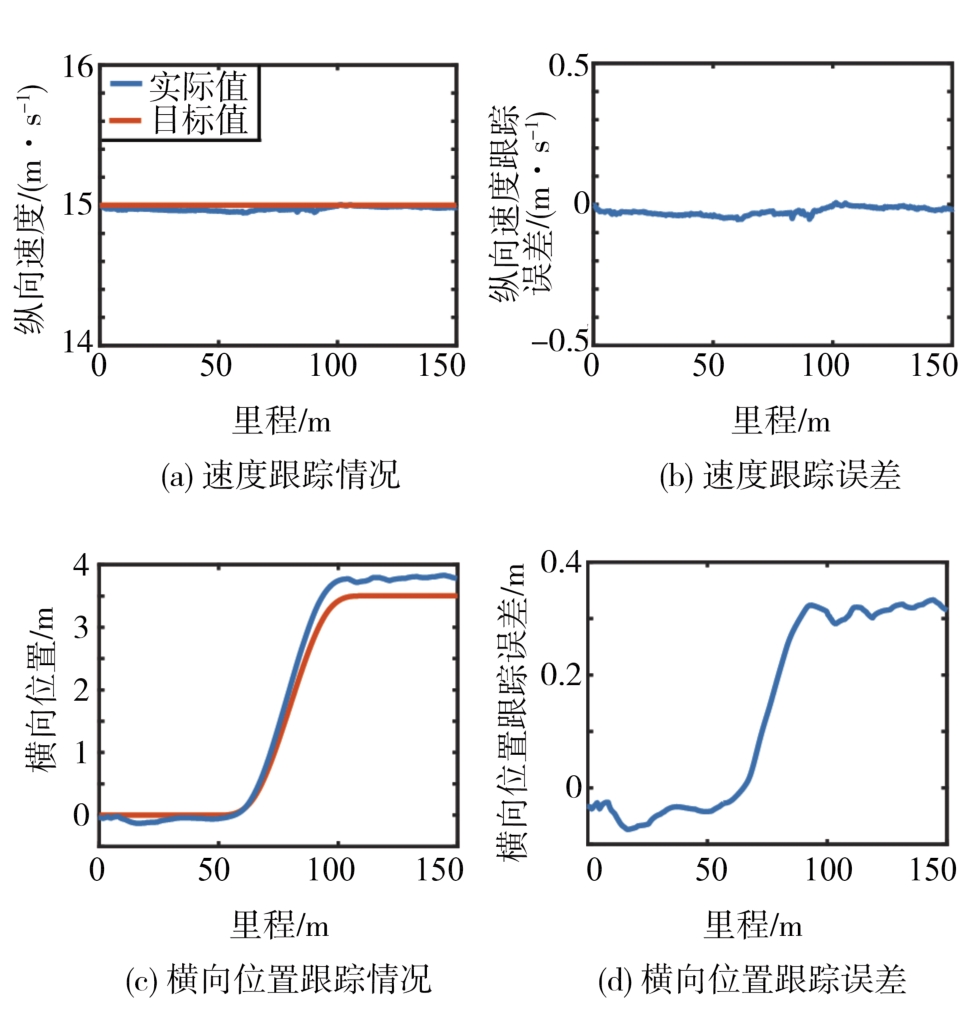
图19
底盘系统目标控制量"


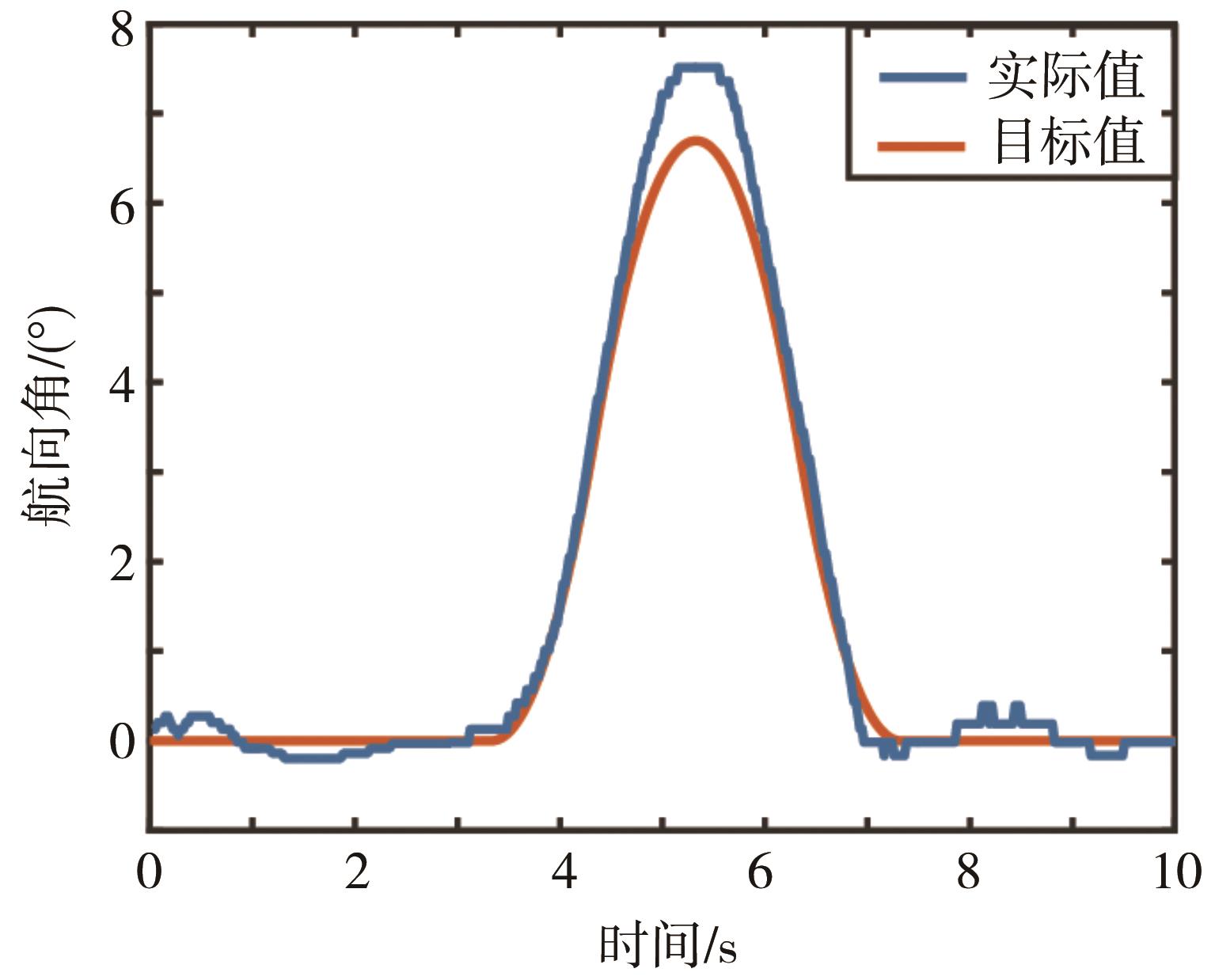
图20
航向角跟踪情况"
| 1 | 熊璐,杨兴,卓桂荣,等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报,2020,56(10):127-143. |
| XIONG L, YANG X, ZHUO G R, et al. Overview of the development status of motion control of driverless vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10):127-143. | |
| 2 | 方培俊,蔡英凤,陈龙,等.基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法[J].汽车工程,2022,44(10):1469-1483,1510. |
| FANG P J, CAI Y F, CHEN L, et al. Trajectory tracking control method based on vehicle dynamics hybrid model for intelligent vehicle[J]. Automotive Engineering, 2022, 44(10): 1469-1483,1510. | |
| 3 | 卢少波,谢菲菲,张博涵,等.基于非对称势场的人车协同博弈避撞[J].汽车工程,2022,44(10):1484-1493. |
| LU S B, XIE F F, ZHANG B H, et al. Human-vehicle cooperative game collision avoidance based on asymmetric potential fields[J]. Automotive Engineering, 2022, 44(10): 1484-1493. | |
| 4 | CHEN Q P, XIE Y F, GUO S F, et al. Sensing system of environmental perception technologies for driverless vehicle: a review of state of the art and challenges [J]. Sensors and Actuators A: Physical, 2021, 319, 112566:1-18. |
| 5 | SAMUEL M, HUSSEIN M, MOHAMAD M. A review of some pure-pursuit based path tracking techniques for control of autonomous vehicle[J]. International Journal of Computer Applications, 2016, 135: 35-38. |
| 6 | WANG R C, YE Q, CAI Y F, et al. Analyzing the influence of automatic steering system on the trajectory tracking accuracy of intelligent vehicle[J]. Advances in Engineering Software, 2018, 121: 188-196. |
| 7 | THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23: 661-692. |
| 8 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15: 566-580. |
| 9 | TURRI V, CARVALHO A, TSENG H E, et al. Linear model predictive control for lane keeping and obstacle avoidance on low curvature roads[C]. 16th International IEEE Conference on Intelligent Transportation Systems, 2013: 378-383. |
| 10 | ATTIA R, ORJUELA R, BASSET M, et al. Combined longitudinal and lateral control for automated vehicle guidance[J]. Vehicle System Dynamics, 2014, 52: 261-279. |
| 11 | KANAYAMA Y, KIMURA Y, MIYAZAKI F, et al. A stable tracking control method for an autonomous mobile robot[C]. IEEE International Conference on Robotics and Automation, 1990, 1: 384-389. |
| 12 | MENHOUR L, DANDREANOVEL B, FLIESS M, et al. Coupled nonlinear vehicle control: flatness-based setting with algebraic estimation techniques[J]. Control Engineering Practice, 2014, 22: 135-146. |
| 13 | GAO Y, GRAY A, TSENG H E, et al. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles[J]. Vehicle System Dynamics, 2014, 52: 802-823. |
| 14 | BROWN M, GERDES J C. Coordinating tire forces to avoid obstacles using nonlinear model predictive control[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5: 21-31. |
| 15 | MARINO R, SCALZI S. Asymptotic sideslip angle and yaw rate decoupling control in four-wheel steering vehicles[J]. Vehicle System Dynamics, 2010, 48: 999-1019. |
| 16 | ZHANG H, ZHAO W. Decoupling control of steering and driving system for in-wheel-motor-drive electric vehicle[J]. Mechanical Systems and Signal Processing, 2018, 101: 389-404. |
| 17 | WANG C, ZHAO W, LUAN Z, et al. Decoupling control of vehicle chassis system based on neural network inverse system[J]. Mechanical Systems and Signal Processing, 2018, 106: 176-197. |
| 18 | 梁艺潇,李以农,余颖弘,等.基于神经网络逆系统的智能汽车纵横向解耦控制[J].湖南大学学报(自然科学版),2019,46(10):26-35. |
| LIANG Y X, LI Y N, YU Y H, et al. Decoupling control of longitudinal and lateral motion for intelligent vehicle based on neural network inverse method[J]. Journal of Hunan University (Natural Sciences), 2019, 46(10): 26-35. | |
| 19 | LIM E, HEDRICK J K. Lateral and longitudinal vehicle control coupling for automated vehicle operation[C]. American Control Conference, 1999, 5: 3676-3680. |
| 20 | 李春文,苗原,冯元琨,等.非线性系统控制的逆系统方法(I)——单变量控制理论[J].控制与决策,1997(5):529-535. |
| LI C W, MIAO Y, FENG Y K, et al. Inverse system approach to nonlinear system control (I) - univariate control theory[J]. Control and Decision, 1997(5): 529-535. | |
| 21 | 谭海鑫. 电动汽车纵横向动力学系统解耦控制研究[D]. 重庆: 重庆交通大学,2019. |
| TAN H X. Research on decoupling control of longitudinal and lateral dynamics system for electric vehicle[D]. Chongqing: Chongqing Jiaotong University, 2019. | |
| 22 | 朱熀秋,顾志伟.基于模糊神经网络逆系统的五自由度无轴承永磁同步电机自抗扰控制[J].电机与控制学报,2021,25(2):72-81. |
| ZHU H Q, GU Z W. Active disturbance rejection control for 5-degree-of-freedom bearingless permanent magnet synchronous motor based on inverse system using the fuzzy neural network[J]. Electric Machines and Control, 2021, 25(2): 72-81. | |
| 23 | 朱熀秋,杜伟.基于模糊神经网络逆系统的无轴承永磁同步电机解耦控制[J].中国电机工程学报,2019,39(4):1190-1198. |
| ZHU H Q, DU W. Decoupling control of bearingless permanent magnet synchronous motor based on inverse system using the adaptive neural-fuzzy inference system[J]. Proceedings of the CSEE, 2019, 39(4): 1190-1198. | |
| 24 | 陈林,杨泽斌,陈正,等.五自由度无轴承异步电机动态解耦控制[J].江苏科技大学学报(自然科学版),2017,31(1): 88-94. |
| CHEN L, YANG Z, CHEN Z, et al. Dynamic decoupling control of 5-degree-of-freedombearingless induction motor[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2017,31(1): 88-94. | |
| 25 | 孙宇新,杨玉伟.无轴承异步电机非线性滤波器自适应逆解耦控制[J].农业工程学报,2016,32(14): 76-83. |
| SUN Y X, YANG Y W. Adaptive inverse decoupling control for bearingless induction motors based on nonlinear filter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(14): 76-83. | |
| 26 | 黄守道,管晓文,佘峰.永磁型无轴承电机解耦控制策略研究[J].控制工程,2010, 17(5): 603-606,639. |
| HUANG S D, GUAN X W, SHE F. On decoupling control strategy of permanent magnet bearingless motor[J]. Control Engineering of China, 2010, 17(5): 603-606,639. |
| [1] | 胡杰, 卿海华, 魏敏, 耿黄政, 张潇, 陈林. 基于多维关联规则的车辆故障码解耦方法研究[J]. 汽车工程, 2024, 46(1): 161-169. |
| [2] | 邹渊,孙文景,张旭东,刘佳慧,温雅,马文斌. 智能网联汽车多域电子电气架构技术发展研究[J]. 汽车工程, 2023, 45(6): 895-909. |
| [3] | 张书恺,陈慧,刘美岑. 全自动泊车系统路径跟随控制策略[J]. 汽车工程, 2022, 44(7): 1027-1039. |
| [4] | 李鹏飞,罗禹贡,刘畅,孔伟伟. 智能网联车辆队列紧急工况控制策略设计[J]. 汽车工程, 2022, 44(3): 299-307. |
| [5] | 赵祥模,张心睿,王润民,徐志刚,凡海金. 网联交叉口信号-车辆轨迹协同优化控制方法[J]. 汽车工程, 2021, 43(11): 1577-1586. |
| [6] | 张雨甜,李斐然,田汉青,胡纪滨,魏超,吴维. 无人车辆底盘集成动力学系统解耦控制研究[J]. 汽车工程, 2021, 43(11): 1673-1682. |
| [7] | 吕辉, 杨坤, 尹辉, 上官文斌, 于德介. 基于多维平行六面体模型的动力总成悬置系统固有特性分析*[J]. 汽车工程, 2020, 42(4): 498-504. |
| [8] | 周苏, 胡哲, 谢非. 车用质子交换膜燃料电池空气供应系统自适应解耦控制方法研究[J]. 汽车工程, 2020, 42(2): 172-177. |
| [9] | 陈志成, 赵健, 朱冰, 吴坚. 基于电控助力制动级联制动防抱死控制策略*[J]. 汽车工程, 2019, 41(11): 1320-1326. |
|