汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1733-1743.doi: 10.19562/j.chinasae.qcgc.2024.10.002
俞志豪,罗荣康,吴佩宝,侯之超( )
)
Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou()
摘要:
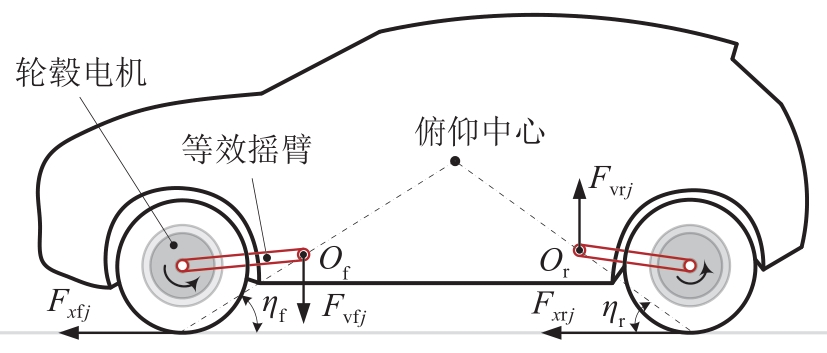
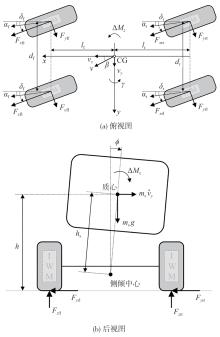
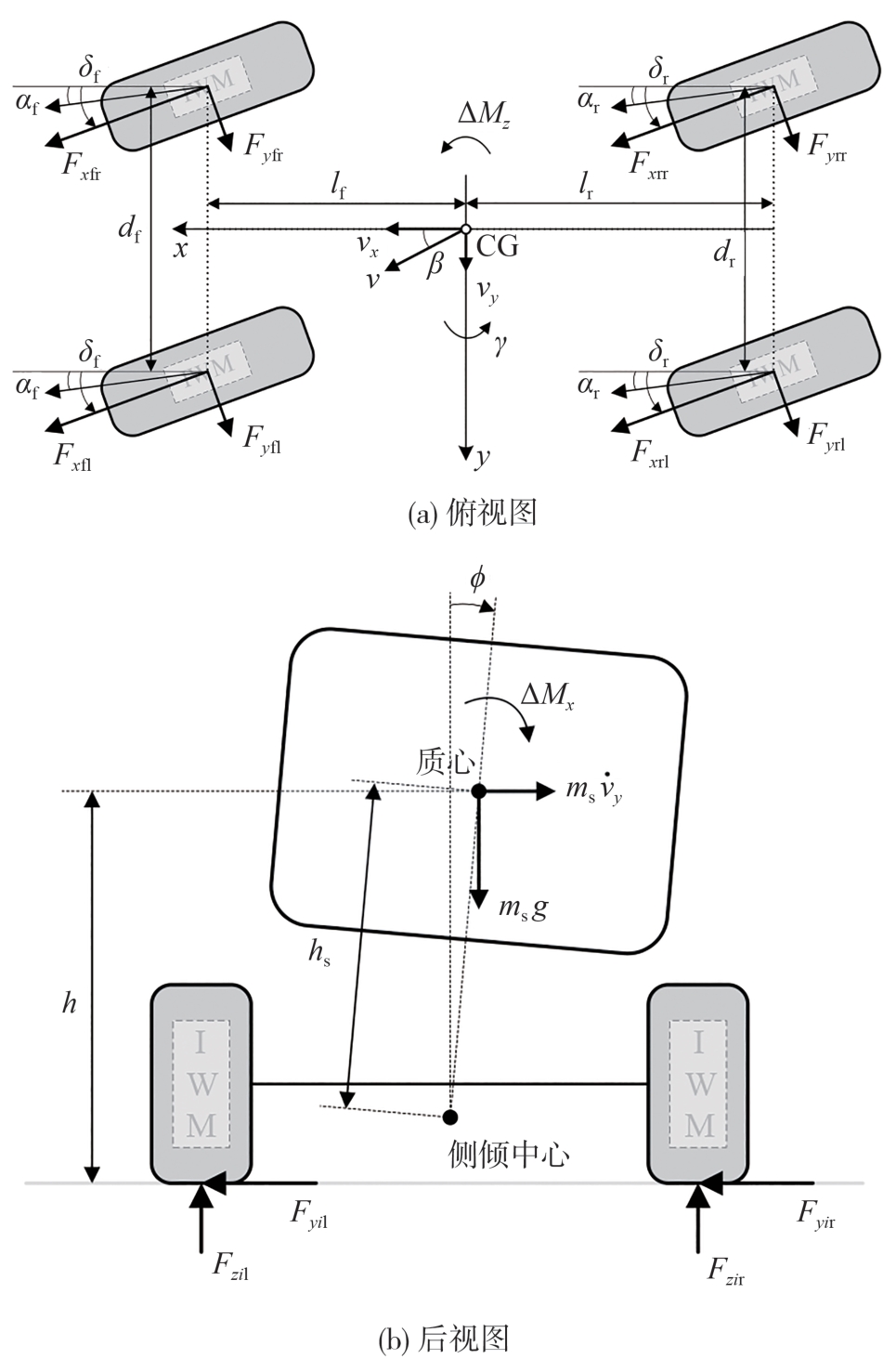
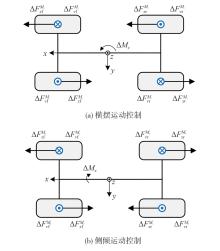
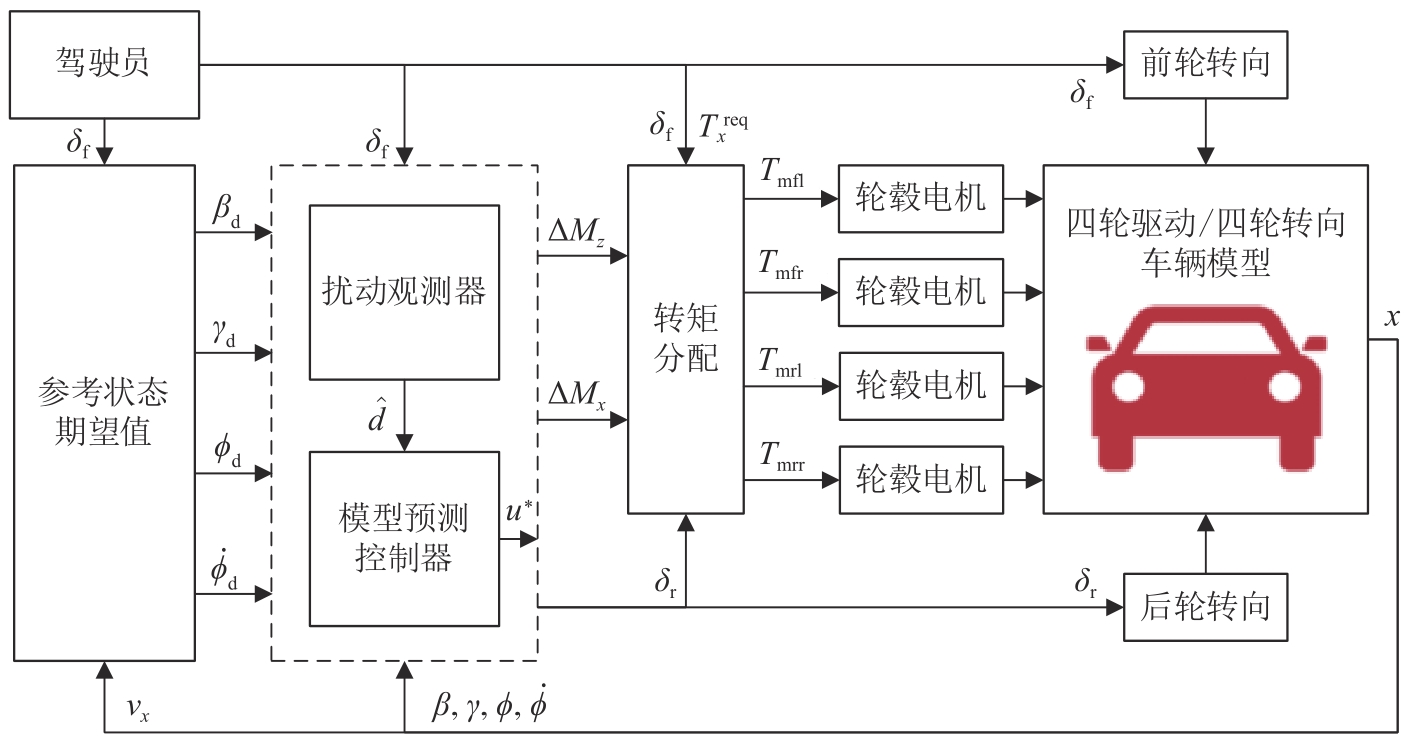
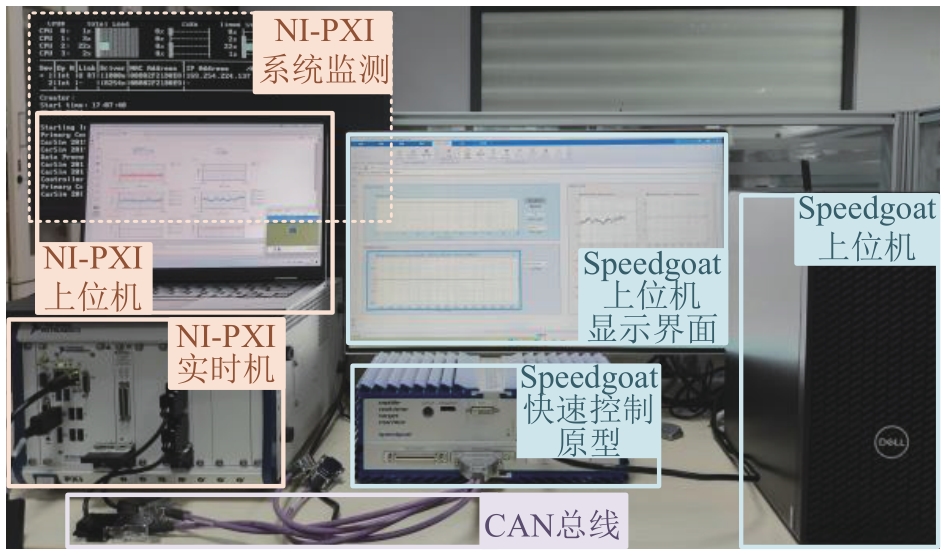
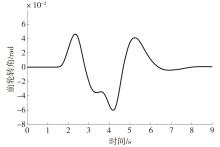
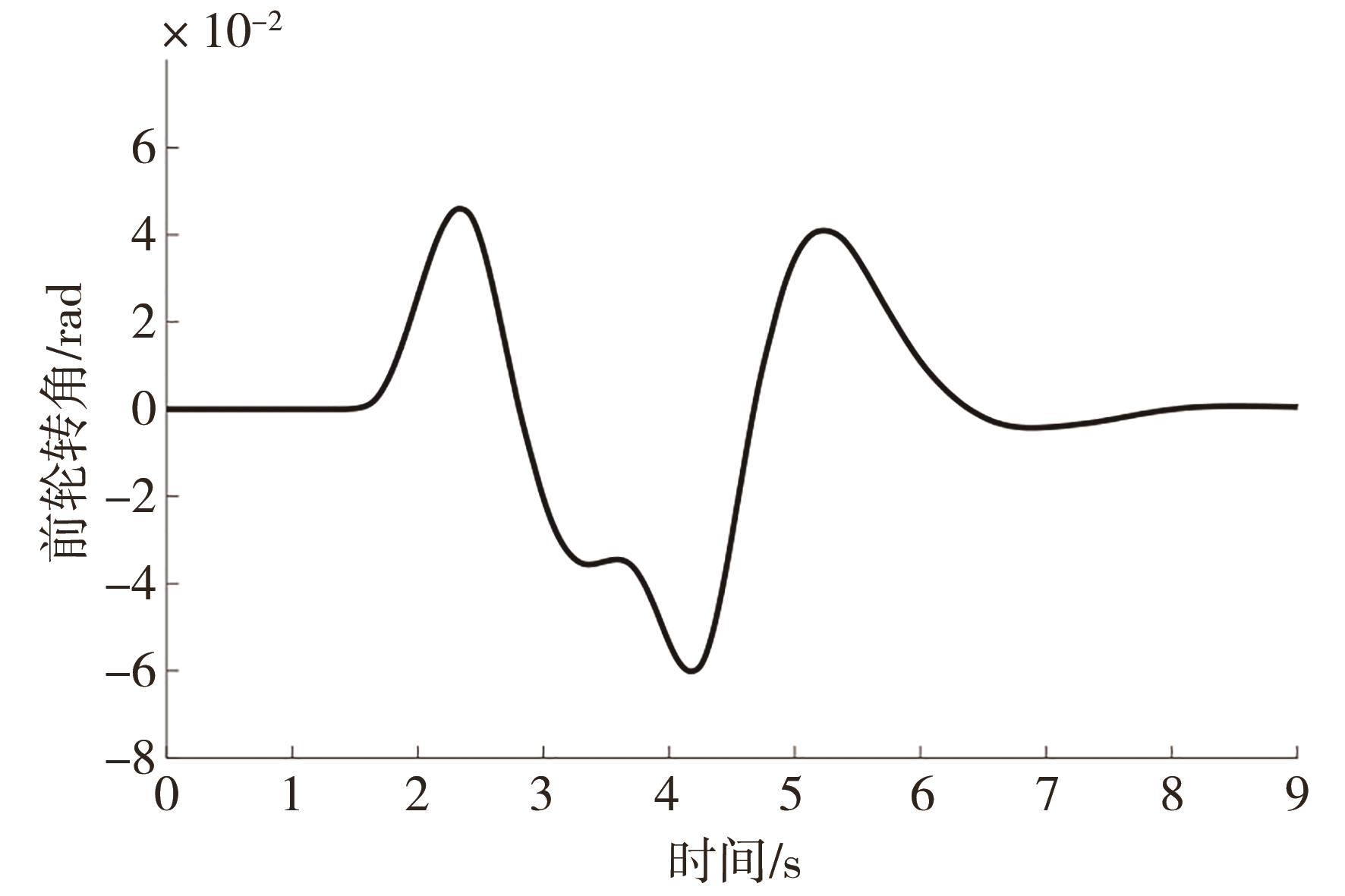
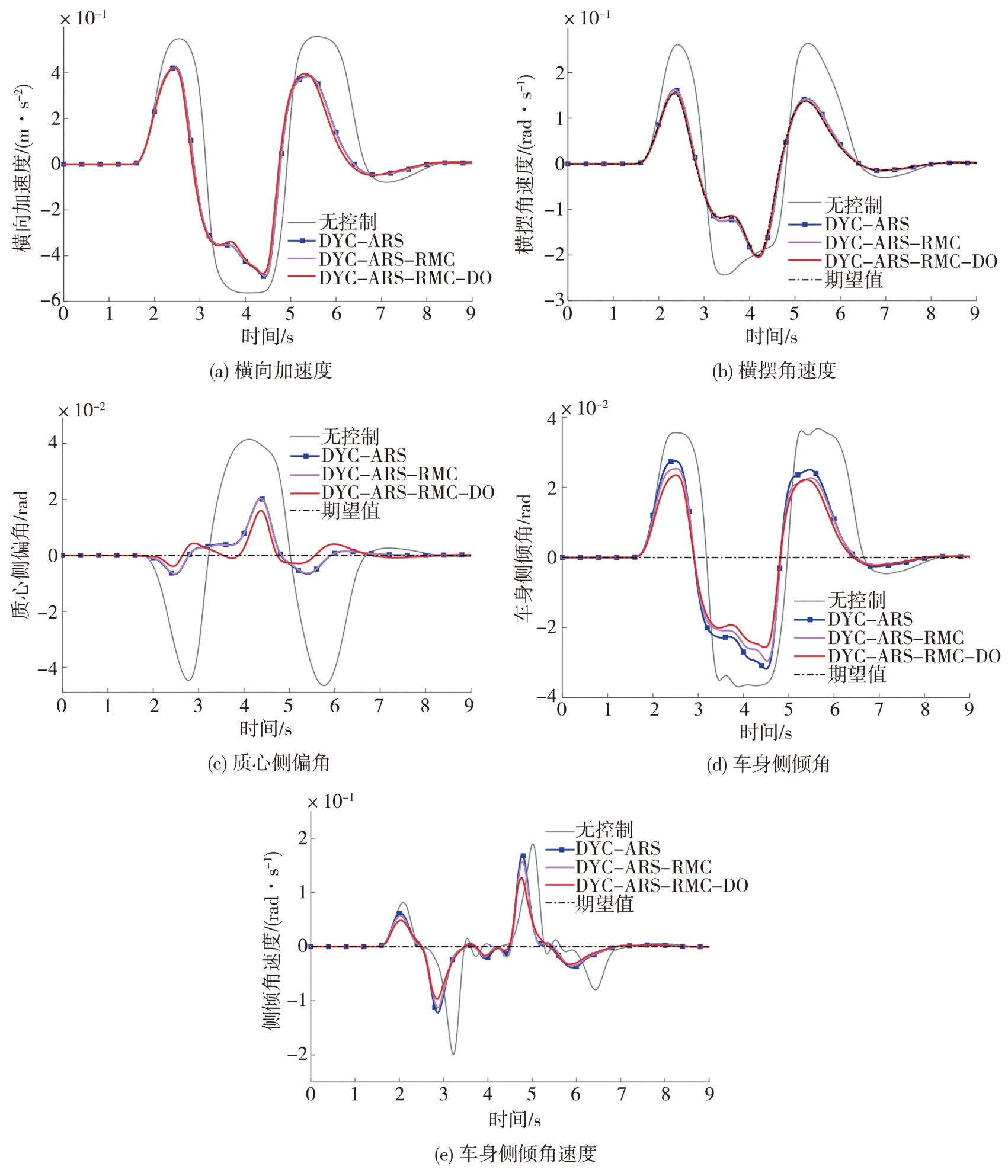
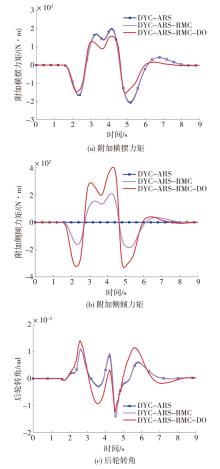
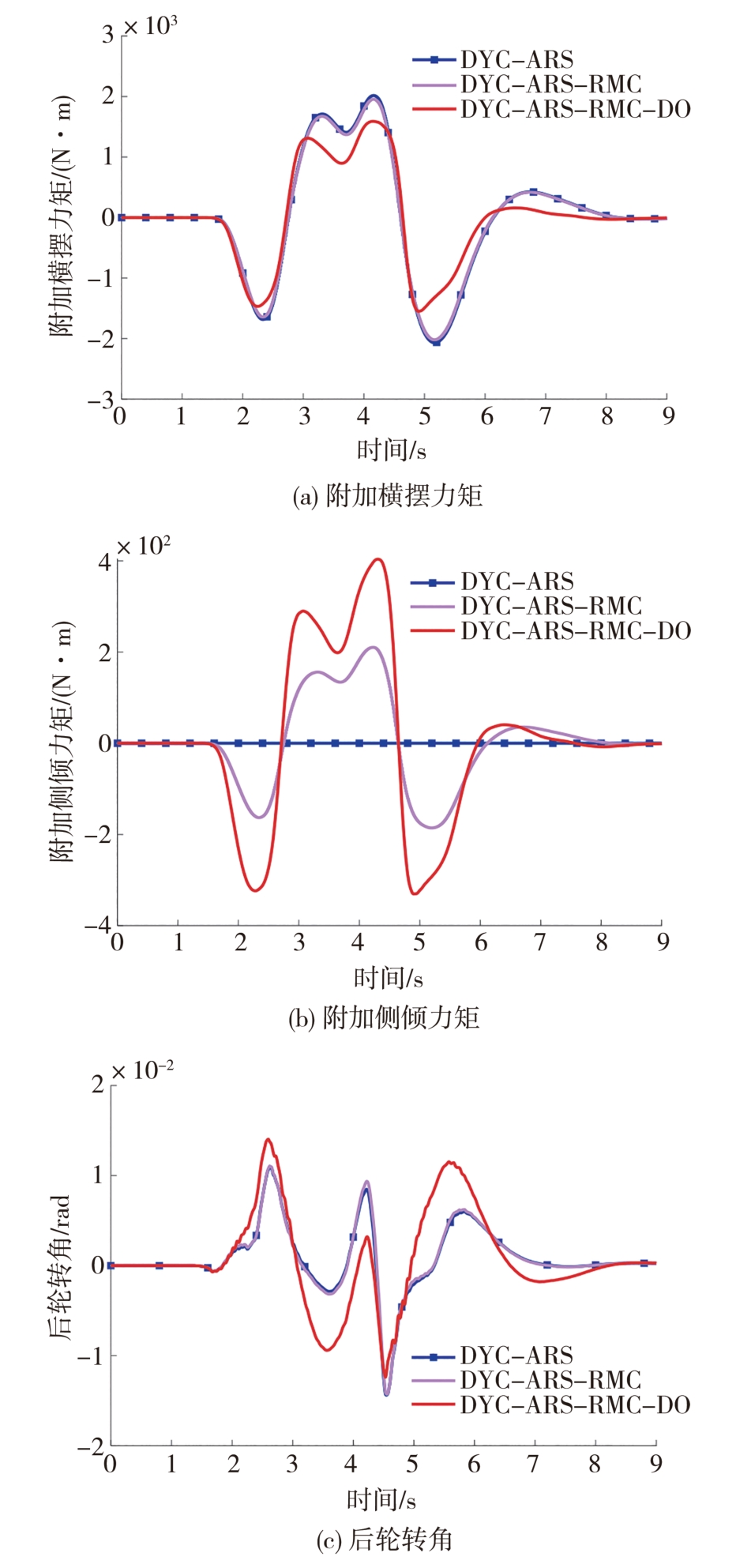
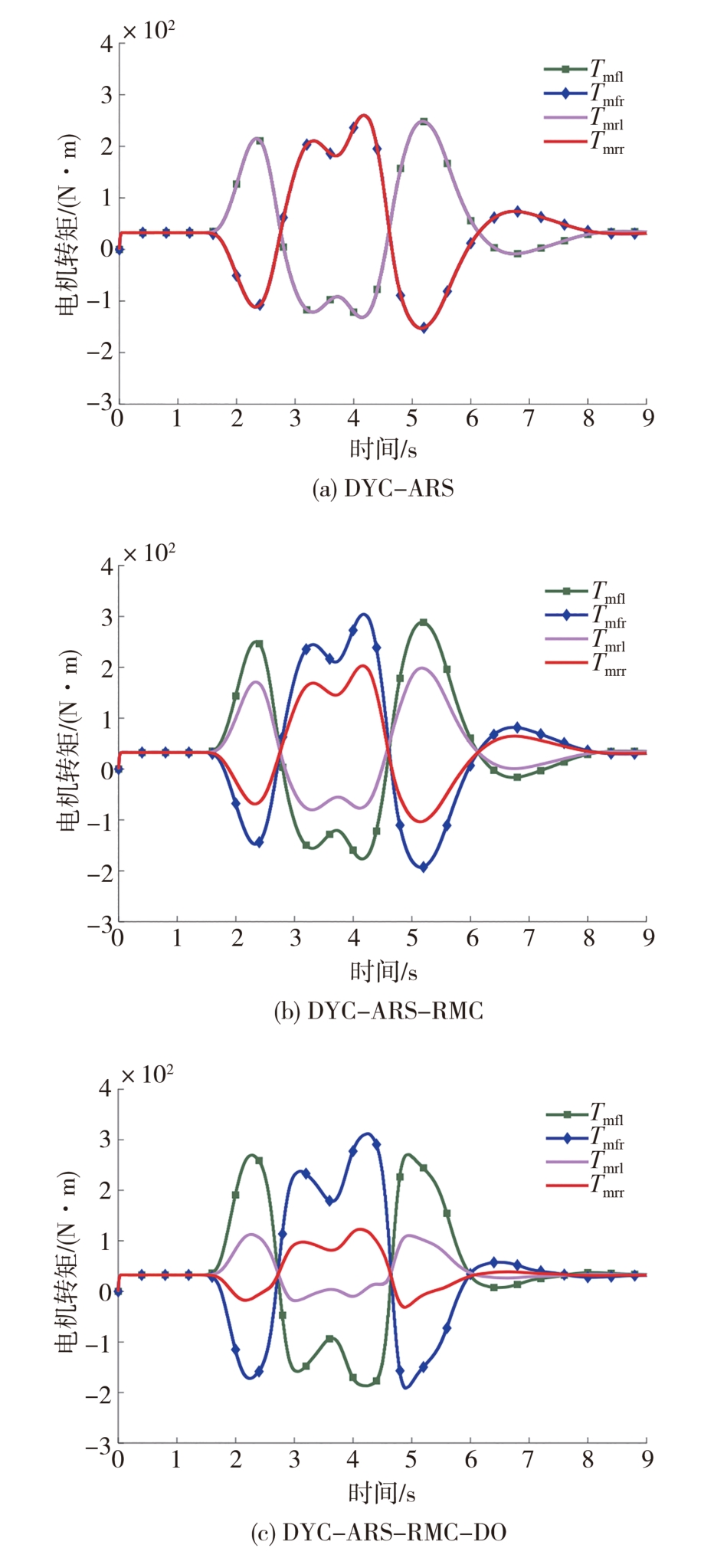
为了改善四轮轮毂驱动车辆的横向稳定性,本文提出一种综合转矩协调和主动后轮转向的底盘协同控制策略。该策略旨在跟踪期望的车辆横摆角速度和质心侧偏角的同时,有效抑制车身侧倾。基于轮毂电机驱动产生的垂向反力特性,设计了车辆纵向、横摆和侧倾运动的转矩协调解耦控制策略。为降低车辆横向动力学建模时忽略的非线性因素及模型不确定性对控制性能的影响,面向底盘协同控制设计了一种基于扰动观测器的模型预测控制方法,对非线性特性和不确定性进行估计和补偿。同时开展了硬件在环测试,通过双移线工况验证了所提出方法的有效性。结果表明,所提出的底盘协同控制策略能够有效提升车辆的横向稳定性,并减小车身侧倾运动;包含扰动观测的控制策略相比于无扰动观测补偿,对期望横摆角速度和质心侧偏角的跟踪误差分别降低了56.9%和27.3%,而车身侧倾角和侧倾角速度分别降低了8.9%和12.5%。