Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 1057-1065.doi: 10.19562/j.chinasae.qcgc.2021.07.013
Previous Articles Next Articles
Yingshi Guo,Hongjia Zhang( ),Rui Fu,Chang Wang
),Rui Fu,Chang Wang
Received:2021-01-04
Revised:2021-02-23
Online:2021-07-25
Published:2021-07-20
Contact:
Hongjia Zhang
E-mail:zhanghongjia@chd.edu.cn
Yingshi Guo,Hongjia Zhang,Rui Fu,Chang Wang. Research on Intelligent Vehicle Lateral Control Model Based on Neuro⁃Ergonomics[J].Automotive Engineering, 2021, 43(7): 1057-1065.
"
"
"
"
"
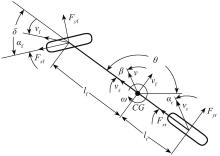
| 动力学模型参数 | 符号 | 数值 |
|---|---|---|
| 整车质量/kg | 1 723 | |
| 绕Z轴转动惯量/(kg·m2) | 4 175 | |
| 质心至前轴的距离/m | 1.232 | |
| 质心至后轴的距离/m | 1.468 | |
| 前轮胎的侧偏刚度/(N·rad-1) | 66 900 | |
| 后轮胎的侧偏刚度/(N·rad-1) | 62 700 |
"

"

"
"


"

"
| 1 | ZHOU M, QU X, JIN S. On the impact of cooperative autonomous vehicles in improving freeway merging: a modified intelligent driver model⁃based approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(6): 1422-1428. |
| 2 | SCHNELLE S, WANG J M, JAGACINSKI R, et al. A feedforward and feedback integrated lateral and longitudinal driver model for personalized advanced driver assistance systems[J]. Mechatronics, 2018, 50:177-188. |
| 3 | MCRUER D T, HENRY R J. A review of quasi-linear pilot models[J]. IEEE Transaction on Human Factors in Electronics, 1967, 8(3): 231-249. |
| 4 | 郭孔辉. 驾驶员-汽车闭环系统操纵运动预瞄最优曲率模型[J]. 汽车工程, 1984, 6(3): 56-59. |
| GUO K H. Drivers⁃vehiele close⁃loop simulation of handling by “preselect optimal curvature method” [J]. Automotive Engineering, 1984, 6(3): 56-59. | |
| 5 | SHI B, XU L, MENG W. Applying a WNN⁃HMM based driver model in human driver simulation: method and test[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(11): 3431-3438. |
| 6 | 辛喆,陈海亮,林子钰, 等.智能汽车的路面附着极限横向轨迹跟踪控制[J].机械工程学报,2020, 56(14):138-145. |
| XIN Z, CHEN H L, LIN Z Y, et al. Lateral trajectory following for automated vehicles at handling limits[J]. Journal of Mechanical Engineering, 2020, 56(14): 138-145. | |
| 7 | 郭应时, 蒋拯民, 白艳.无人驾驶汽车路径跟踪控制方法拟人程度研究[J].中国公路学报, 2018(8):189-196. |
| GUO Y S, JIANG Z M, BAI Y. Investigation of humanoid level of path tracking methods[J]. China Journal of Highway and Transport, 2018(8):189-196. | |
| 8 | TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observation and microscopic simulations[J]. Physical Review E, 2000, 62 (2): 1805. |
| 9 | RAHMAN S, ABDEL⁃ATY M, WANG L, et al. Understanding the highway safety benefits of different approaches of connected vehicles in reduced visibility conditions[J]. Transportation Research Record, 2018, 2672 (19): 91–101. |
| 10 | 龚建伟. 无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社, 2014. |
| GONG J W. Model predictive control for self⁃driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. | |
| 11 | 刘凯,龚建伟,陈舒平, 等.高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J].机械工程学报,2018,54(14):141-151. |
| LIU K, GONG J W, CHEN S P, et al. Dynamic modeling analysis of optimal motion planning and control for high⁃speed self-driving vehicles[J]. Journal of Mechanical Engineering, 2018, 54(14): 141-151. | |
| 12 | 吉岩,陈虹. 基于MPC的驾驶员转向控制行为建模与仿真[J]. 计算机仿真,2014, 2(3): 198-203. |
| JI Y, CHEN H. Modeling and simulation of driver steering behavior based on model predictive control[J]. Computer Simulation, 2014, 2(3): 198-203. | |
| 13 | 管欣,高振海,郭孔辉.驾驶员稳态预瞄动态校正假说[J].汽车工程,2003,25(3):227-231. |
| GUAN X, GAO Z H, GUO K H. A hypothesis of steady preview and dynamic correction for driver model[J]. Automotive Engineering, 2003, 25(3): 227-231. | |
| 14 | AASMAN J. Modelling driver behavior in Soar[D]. Groningen: University of Groningen, 2009. |
| 15 | SALVUCCI D D. Modeling driver behavior in a cognitive architecture [J]. Human Factor, 2006, 48(2): 362-380. |
| 16 | LI A, ZHAO W, WANG X, et al. ACT⁃R cognitive model⁃based trajectory planning method study for electric vehicle’s active obstacle avoidance system[J]. Energies, 2018, 11(1): 75. |
| 17 | WU C, LIU Y. Queuing network modeling of driver workload and performance[J]. IEEE Transaction on Intelligent Transportation Systems, 2007, 8(3): 528–537. |
| 18 | BI L, GAN G, SHANG J, et al. Queuing network modeling of driver lateral control with or without a cognitive distraction task[J]. IEEE Transaction on Intelligent Transportation Systems, 2012, 13 (4): 1810-1820. |
| 19 | BI L, LU Y, FAN X A, et al. Queuing network modeling of driver EEG signals⁃based steering control[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 25(8): 1117-1124. |
| 20 | LIU Y, FEYAN R, TSIMHONI O. Queuing network⁃model human processor (QN⁃MHP): a computational architecture for multitask performance in human⁃machine systems[J]. ACM Transactions on Computer⁃Human Interaction (TOCHI), 2006, 13(1): 37-70. |
| 21 | PICK A J, COLE D J. A mathematical model of driver steering control including neuromuscular dynamics[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130(3). |
| [1] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [5] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [6] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [7] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [8] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [9] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [10] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [11] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [12] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [13] | Cheng Lin,Sheng Liang,Xinle Gong,Xiao Yu,Bowen Wang. Integrated Dynamic Control Strategy for Extreme Maneuvers of 4WIDEVs [J]. Automotive Engineering, 2022, 44(9): 1372-1385. |
| [14] | Shaobo Xie,Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang. Study on Coordinated Control of Speed Planning and Energy Management for Connected Hybrid Electric Truck in Vehicle Following Scene [J]. Automotive Engineering, 2022, 44(8): 1136-1143. |
| [15] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
|