Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (8): 1168-1176.doi: 10.19562/j.chinasae.qcgc.2021.08.007
Previous Articles Next Articles
Fengchong Lan1,Shicheng Li1,Jiqing Chen1( ),Zongmao Shen2
),Zongmao Shen2
Received:2021-03-22
Revised:2021-04-28
Online:2021-08-25
Published:2021-08-20
Contact:
Jiqing Chen
E-mail:chenjq@scut.edu.cn
Fengchong Lan,Shicheng Li,Jiqing Chen,Zongmao Shen. Identification Method for Occupant Personalized Ride Comfort of Autonomous Vehicles[J].Automotive Engineering, 2021, 43(8): 1168-1176.
"
| 可接受度 | 不可接受 | 临界 | 可接受 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 主观感受 | 极差 | 剧烈 | 差 | 较差 | 临界 | 一般 | 好 | 较好 | 极好 | 完美 |
| 分数 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |

"

"
"
"
"
| 编号 | 时域加权 | 频域加权 | 编号 | 时域加权 | 频域加权 |
|---|---|---|---|---|---|
| 1 | 0.268 | 0.269 | 6 | 0.269 | 0.260 |
| 2 | 0.577 | 0.615 | 7 | 0.303 | 0.323 |
| 3 | 1.309 | 1.103 | 8 | 0.278 | 0.261 |
| 4 | 0.508 | 0.546 | 9 | 0.391 | 0.425 |
| 5 | 0.853 | 0.779 | 10 | 0.422 | 0.403 |
"
"
"
"

"
| 编号 | 参数名称 | 编号 | 参数名称 |
|---|---|---|---|
| 1 | 换道时间 | 10 | 横向加速度绝对值平均值 |
| 2 | 换道速度 | 11 | 横向加速度标准差 |
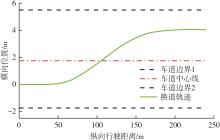
| 3 | 换道纵向行驶距离 | 12 | 横向冲击绝对值最大值 |
| 4 | 换道横向距离 | 13 | 横向冲击绝对值平均值 |
| 5 | 纵向加速度绝对值最大值 | 14 | 垂向加速度最大值 |
| 6 | 纵向加速度平均值 | 15 | 垂向加速度最小值绝对值 |
| 7 | 纵向加速度标准差 | 16 | 垂向加速度绝对值平均值 |
| 8 | 横向加速度最大值 | 17 | 垂向加速度标准差 |
| 9 | 横向加速度最小值的绝对值 | 18 | 主车与前车距离 |
"
| KMO取样适切性量数 | 0.756 1 | |
|---|---|---|
| 巴特利特球形度检验 | 近似卡方 | 6 259.130 |
| 自由度 | 153 | |
| 显著性 | 0.00 | |
"
参数 编号 | 初始特征值 | 参数 编号 | 初始特征值 | ||||
|---|---|---|---|---|---|---|---|
| 特征根 | 方差 贡献/% | 累积 贡献/% | 特征根 | 方差 贡献/% | 累积 贡献/% | ||
| 1 | 5.588 | 31.047 | 31.047 | 10 | 0.272 | 1.511 | 96.109 |
| 2 | 3.791 | 21.064 | 52.111 | 11 | 0.249 | 1.385 | 97.495 |
| 3 | 2.467 | 13.707 | 65.818 | 12 | 0.175 | 0.970 | 98.464 |
| 4 | 1.659 | 9.218 | 75.036 | 13 | 0.118 | 0.656 | 99.121 |
| 5 | 1.006 | 5.590 | 80.626 | 14 | 0.061 | 0.340 | 99.460 |
| 6 | 0.895 | 4.971 | 85.597 | 15 | 0.041 | 0.226 | 99.686 |
| 7 | 0.799 | 4.440 | 90.037 | 16 | 0.026 | 0.144 | 99.830 |
| 8 | 0.475 | 2.640 | 92.677 | 17 | 0.016 | 0.090 | 99.921 |
| 9 | 0.346 | 1.921 | 94.599 | 18 | 0.014 | 0.079 | 100.000 |
"
参数 编号 | 行驶车辆状态参数公共因子 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 1 | -0.579 | 0.045 | -0.016 | -0.147 | 0.488 |
| 2 | 0.084 | 0.298 | -0.162 | 0.750 | 0.293 |
| 3 | -0.310 | 0.280 | -0.152 | 0.572 | 0.554 |
| 4 | 0.088 | -0.013 | -0.033 | 0.070 | 0.807 |
| 5 | 0.072 | 0.077 | 0.975 | -0.025 | -0.015 |
| 6 | 0.113 | -0.093 | 0.875 | 0.161 | -0.125 |
| 7 | 0.103 | 0.039 | 0.858 | -0.212 | 0.031 |
| 8 | 0.766 | 0.097 | 0.147 | 0.189 | 0.035 |
| 9 | 0.834 | 0.153 | 0.042 | -0.175 | 0.047 |
| 10 | 0.928 | -0.036 | 0.031 | 0.181 | -0.012 |
| 11 | 0.971 | -0.007 | 0.063 | 0.096 | -0.036 |
| 12 | 0.874 | 0.034 | 0.089 | -0.079 | -0.012 |
| 13 | 0.967 | -0.016 | 0.058 | 0.057 | -0.048 |
| 14 | -0.026 | 0.926 | -0.048 | -0.089 | 0.026 |
| 15 | 0.026 | 0.874 | 0.017 | -0.011 | 0.052 |
| 16 | 0.132 | 0.877 | 0.094 | 0.308 | 0.011 |
| 17 | 0.046 | 0.973 | -0.016 | 0.079 | 0.013 |
| 18 | 0.191 | -0.082 | 0.072 | 0.729 | -0.127 |
"
| 因子编号 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 旋转因子贡献率 | 0.295 4 | 0.198 1 | 0.142 1 | 0.097 0 | 0.073 6 |
| 加权系数 | 0.366 4 | 0.245 7 | 0.176 2 | 0.120 3 | 0.091 3 |
"
"
| 系数 | k1 | k2 | k3 | k4 | k5 | k6 |
|---|---|---|---|---|---|---|
| 数值 | 0.080 7 | 0.098 4 | 0.034 5 | -0.028 3 | -0.001 3 | 0.422 9 |
| 加权 | 0.331 8 | 0.404 6 | 0.141 9 | 0.116 4 | 0.005 3 |
"
"
"
"
"
| 1 | BIMBRAW K. Autonomous cars: past, present and future a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology[C]. IEEE, 2015. |
| 2 | GONZÁLEZ D, PÉREZ J, MILANÉS V, et al. A review of motion planning techniques for automated vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4):1135-1145. |
| 3 | CHEN L, QIN D, XU X, et al. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3⁃D Bezier curve [J]. Advances in Engineering Software, 2019, 132(JUN.):65-73. |
| 4 | HU X, LONG C, BO T, et al. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles [J]. Mechanical Systems and Signal Processing, 2018, 100(FEB.1):482-500. |
| 5 | 宋晓琳,周南,黄正瑜,等.改进RRT在汽车避障局部路径规划中的应用[J].湖南大学学报(自然科学版), 2017,44(4):30-37. |
| SONG X L, ZHOU N, HUANG Z Y, et al. An improved RRT algorithm of local path planning for vehicle collision avoidance [J]. Journal of Hunan University (Natural Sciences), 2017,44(4):30-37. | |
| 6 | 姚君延. 基于深度增强学习的路径规划算法研究 [D]. 成都:电子科技大学, 2018. |
| YAO J Y. Research of path planning algorithms based on deep reinforcement learning [D]. Chengdu: University of Electronic Science and Technology of China, 2018. | |
| 7 | MAVROGIANNIS C I, BLUKIS V, KNEPPER R A. Socially competent navigation planning by deep learning of multi⁃agent path topologies [C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017. |
| 8 | 王天舸. 智能驾驶汽车运动规划与运动控制方法研究[D].长春:吉林大学, 2019. |
| WANG T G. Study on motion plan and motion control method of intelligent driving vehicle[D]. Changchun: Jilin University, 2019. | |
| 9 | SCHOCKENHOFF F, NEHSE H, LIENKAMP M. Maneuver⁃based objectification of user comfort affecting aspects of driving style of autonomous vehicle concepts [J]. Applied Sciences, 2020, 10(11):3946. |
| 10 | 刘帅. 基于安全场的智能汽车个性化换道决策与规划算法研究 [D]. 长春:吉林大学, 2019. |
| LIU S. A personalized lane⁃changing decision⁃making and trajectory⁃planning method based on safety field for intelligent vehicles[D]. Changchun: Jilin University, 2019. | |
| 11 | HU H, LU Z, WANG Q, et al. End⁃to⁃end automated lane⁃change maneuvering considering driving style using a deep deterministic policy gradient algorithm [J]. Sensors, 2020, 20(18):5443. |
| 12 | 闫淑德. 基于驾驶习性的智能汽车个性化换道辅助系统研究[D]. 长春:吉林大学,2019. |
| YAN S D. Research on the personalized lane⁃change assistance system with driving style identification [D]. Changchun: Jilin University,2019. | |
| 13 | MARJANEN Y, MANSFIELD N J. Relative contribution of translational and rotational vibration to discomfort [J]. Industrial Health, 2010, 48(5):519. |
| 14 | BURKHARD G, BERGER T, ENDERS E, et al. Objectifying ride comfort in autonomous driving-an extended model of the ISO-2631 standard to objectify the ride comfort of an inattentive occupant [C]. 2nd International Comfort Congress⁃ICC2019,2019. |
| 15 | SAE J1060. Subjective rating scale for evaluation of noise and ride comfort characteristics related to motor vehicle tires SAE recommended practice [S]. USA: SAE, 2000. |
| 16 | 杨大柱.MATLAB在IIR滤波器设计中的应用[J].现代机械,2006(5):60-61,82. |
| YANG D Z. Application of MATLAB in the design of IIR filter[J]. Modern Machinery, 2006(5):60-61,82. | |
| 17 | 宗长富,陈双,冯刚,等.基于频率加权滤波的汽车平顺性评价[J].吉林大学学报(工学版), 2011,41(6):517-521. |
| ZONG C F, CHEN S, FENG G, et al. Evaluation of vehicle ride comfort based on frequency weighted filtering [J]. Journal of Jilin University (Engineering and Technology Edition), 2011,41(6):517-521. | |
| 18 | 兰凤崇,李诗成,陈吉清,等.考虑操纵稳定性的自动驾驶汽车轨迹综合优化方法[J].湖南大学学报(自然科学版), 2019(10):36-45. |
| LAN F C, LI S C, CHEN J Q, et al. Comprehensive approach for trajectory optimization of autopilot vehicles considering handling stability [J]. Journal of Hunan University (Natural Sciences), 2019(10):36-45. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Tonghang Zhao,Junguang Wang,Shudong Tian,Xiangzhen Chen. Research on NVH Control Technology of Heat Pump System in Hybrid Electric Vehicles [J]. Automotive Engineering, 2024, 46(2): 337-345. |
| [3] | Junnian Wang, Chuantai Cheng, Fei Gao, Tiejun Fu, Jindong Ren. An Experimental Study on Optimal H-Point and Seat Parameters for Shared Car Drivers [J]. Automotive Engineering, 2024, 46(1): 39-49. |
| [4] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [5] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [6] | Xianxu Bai,Yu Zuo,Weihan Li,Qin Shi,Chuzhao Li,Shulian Zhao,Jiong Chen. Quantitative Evaluation of SOTIF for Control Module of AEBS [J]. Automotive Engineering, 2023, 45(9): 1655-1665. |
| [7] | Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision [J]. Automotive Engineering, 2023, 45(9): 1666-1676. |
| [8] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [9] | Wei Ran,Hui Chen,Jiaxin Yang,Nishimura Yosuke,Chaopeng Guo,Youyu Yin. Design Method of Motion Planning Reward Function Based on Utility Theory [J]. Automotive Engineering, 2023, 45(8): 1373-1382. |
| [10] | Bing Zhu,Hongyi Jiang,Jian Zhao,Jiayi Han,Yanchen Liu. A Method for Dynamically Calculating and Evaluating the Trustworthiness of Collaborative Perception of Intelligent Connected Vehicles [J]. Automotive Engineering, 2023, 45(8): 1383-1391. |
| [11] | Xinzheng Wu,Xingyu Xing,Lihao Liu,Yong Shen,Junyi Chen. Testing and Analysis of the Robustness of Decision-Making and Planning Systems Based on Fault Injection [J]. Automotive Engineering, 2023, 45(8): 1428-1437. |
| [12] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [13] | Xiaoqiang Sun, Yulin Wang, Weiwei Hu, Yingfeng Cai, Long Chen, Wong Pak Kin. Research on Estimation Strategy of Vehicle Driving State Based on Tire Piecewise Affine Identification Model [J]. Automotive Engineering, 2023, 45(7): 1212-1221. |
| [14] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [15] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |