Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1863-1872.doi: 10.19562/j.chinasae.qcgc.2024.10.013
Previous Articles Next Articles
Mengxi Wang1,Yingfeng Cai1( ),Hai Wang2,Zhongyu Rao1,Long Chen1,Yicheng Li1
),Hai Wang2,Zhongyu Rao1,Long Chen1,Yicheng Li1
Received:2024-03-16
Revised:2024-04-23
Online:2024-10-25
Published:2024-10-21
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
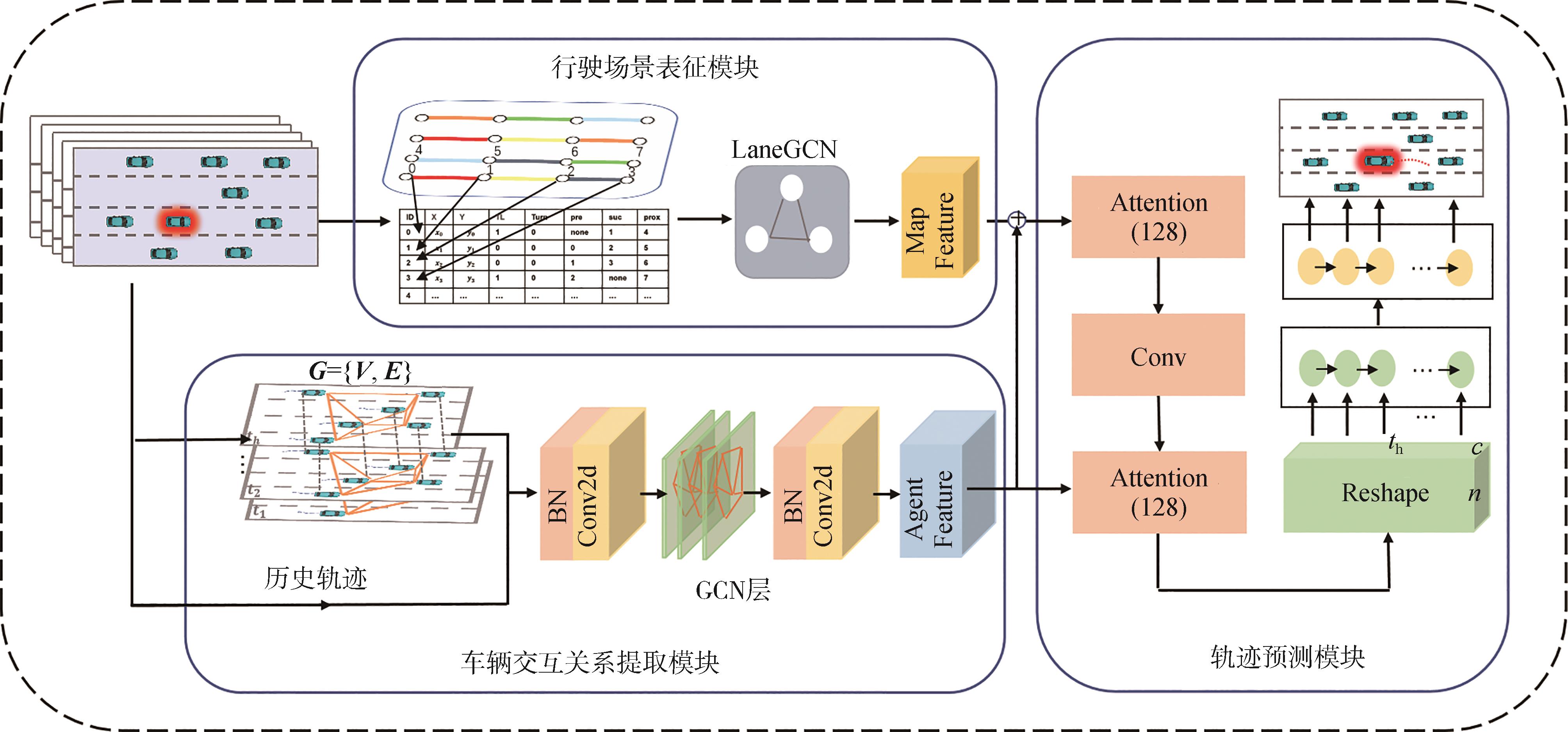
Mengxi Wang,Yingfeng Cai,Hai Wang,Zhongyu Rao,Long Chen,Yicheng Li. Vehicle Trajectory Prediction Method Based on Graph Convolutional Interaction Network[J].Automotive Engineering, 2024, 46(10): 1863-1872.

"

"
"
"
"
| 模型模块 | K=1 | K=6 | |||||
|---|---|---|---|---|---|---|---|
| AgentGCN | LaneGCN | 预测模块 | min ADE | min FDE | min ADE | min FDE | |
| 10 m + D-W | MLP | GRU | |||||
| √ | 4.10 | 9.14 | 2.62 | 5.46 | |||
| √ | √ | 2.98 | 6.24 | 1.28 | 2.15 | ||
| √ | √ | √ | 2.77 | 5.74 | 1.20 | 1.97 | |
| √ | √ | √ | 2.09 | 4.67 | 0.82 | 1.25 | |
"
"
"
| 模型 | minADE | minFDE | MR |
|---|---|---|---|
| GRIP++ | 1.40 | 2.52 | 0.31 |
| TNT | 0.94 | 1.54 | 0.13 |
| LaneGCN | 0.87 | 1.36 | 0.16 |
| HOME | 0.92 | 1.36 | 0.11 |
| mmTransformer | 0.84 | 1.34 | 0.15 |
| SSL-Lanes | 0.84 | 1.25 | 0.13 |
| FRM | 0.82 | 1.27 | 0.14 |
| Our Model | 0.82 | 1.25 | 0.14 |

"
| 1 | CAI Y, DAI L, WANG H, et al. DLnet with training task conversion stream for precise semantic segmentation in actual traffic scene[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 33(11): 6443-6457. |
| 2 | ZHOU J, OLOFSSON B, FRISK E. Interaction-aware motion planning for autonomous vehicles with multi-modal obstacle uncertainty predictions[J]. IEEE Transactions on Intelligent Vehicles, 2023. |
| 3 | 胡启慧,蔡英凤,王海,等. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| HU Qihui, CAI Yingfeng, WANG Hai, et al. Heterogeneous multi-object trajectory prediction method based on hierarchical graph attention[J]. Automotive Engineering, 2023, 45(8): 1448-1456. | |
| 4 | 汪梓豪,蔡英凤,王海,等. 基于单目视觉运动估计的周边多目标轨迹预测方法[J]. 汽车工程, 2022, 44(9): 1318-1326. |
| WANG Zihao,CAI Yingfeng,WANG Hai, et al. Surrounding multi-target trajectory prediction method based on monocular visual motion estimation[J]. Automotive Engineering, 2022, 44(9): 1318-1326. | |
| 5 | 高镇海, 鲍明喜, 高菲,等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152. |
| GAO Zhenhai, BAO Mingxi, GAO Fei, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J]. Automotive Engineering, 2023, 45(7): 1145-1152. | |
| 6 | DANIELSSON S, PETERSSON L, EIDEHALL A. Monte Carlo based threat assessment: analysis and improvements[C]. 2007 IEEE Intelligent Vehicles Symposium. IEEE, 2007: 233-238. |
| 7 | LEFÈVRE S, LAUGIER C, IBAÑEZ-GUZMÁN J. Exploiting map information for driver intention estimation at road intersections[C]. 2011 IEEE Intelligent Vehicles Symposium (iv). IEEE, 2011: 583-588. |
| 8 | FIRL J, STÜBING H, HUSS S A, et al. Predictive maneuver evaluation for enhancement of car-to-x mobility data[C]. 2012 IEEE Intelligent Vehicles Symposium. IEEE, 2012: 558-564. |
| 9 | AOUDE G S, DESARAJU V R, STEPHENS L H, et al. Behavior classification algorithms at intersections and validation using naturalistic data[C]. 2011 IEEE Intelligent Vehicles Symposium (iv). IEEE, 2011: 601-606. |
| 10 | MORRIS B T, TRIVEDI M M. Trajectory learning for activity understanding: unsupervised, multilevel, and long-term adaptive approach[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2011, 33(11): 2287-2301. |
| 11 | LI Z, WANG B, GONG J, et al. Development and evaluation of two learning-based personalized driver models for pure pursuit path-tracking behaviors[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 79-84. |
| 12 | CHANDRA R, BHATTACHARYA U, BERA A, et al. Traphic: trajectory prediction in dense and heterogeneous traffic using weighted interactions[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8483-8492. |
| 13 | DIEHL F, BRUNNER T, LE M T, et al. Graph neural networks for modelling traffic participant interaction[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019: 695-701. |
| 14 | 连静,李硕贤,刘一荻,等. 基于车道目标引导的车辆轨迹预测[J]. 汽车工程, 2023, 45(8): 1353-1361. |
| LIAN Jing, LI Shuoxian, LIU Yidi, et al. Goal supervised attention network for vehicle trajectory prediction[J]. Automotive Engineering, 2023, 45(8): 1353-1361. | |
| 15 | CHAI Y, SAPP B, BANSAL M, et al. Multipath: multiple probabilistic anchor trajectory hypotheses for behavior prediction[J]. arXiv preprint arXiv:, 2019. |
| 16 | HONG J, SAPP B, PHILBIN J. Rules of the road: predicting driving behavior with a convolutional model of semantic interactions[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8454-8462. |
| 17 | GAO J, SUN C, ZHAO H, et al. VectorNet: encoding HD maps and agent dynamics from vectorized representation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11525-11533. |
| 18 | LIANG M, YANG B, HU R, et al. Learning lane graph representations for motion forecasting[C]. Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part II 16. Springer International Publishing, 2020: 541-556. |
| 19 | LI X, YING X, CHUAH M C. Grip++: enhanced graph-based interaction-aware trajectory prediction for autonomous driving[J]. arXiv preprint arXiv:, 2019. |
| 20 | CHANG M F, LAMBERT J, SANGKLOY P, et al. Argoverse: 3D tracking and forecasting with rich maps[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8748-8757. |
| 21 | ZHAO H, GAO J, LAN T, et al. TNT: target-driven trajectory prediction[J]. arXiv preprint arXiv:, 2020. |
| 22 | GILLES T, SABATINI S, TSISHKOU D, et al. HOME: heatmap output for future motion estimation[J]. arXiv preprint arXiv:, 2021. |
| 23 | LIU Y, ZHANG J, FANG L, et al. Multimodal motion prediction with stacked transformers[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 2021: 7573-7582. |
| 24 | BHATTACHARYYA P, HUANG C, CZARNECKI K. SSL-Lanes: self-supervised learning for motion forecasting in autonomous driving[C]. Conference on Robot Learning. PMLR, 2023: 1793-1805. |
| 25 | PARK D, RYU H, YANG Y, et al. Leveraging future relationship reasoning for vehicle trajectory prediction[J]. arXiv preprint arXiv:, 2023. |
| [1] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [2] | Bing Zhu,Tianxin Fan,Jian Zhao,Peixing Zhang,Dongjian Song,Yue Xue,Wenbo Zhao. Generation Method for Anthropomorphic Continuous Interactive Test Scenarios of Automated Driving [J]. Automotive Engineering, 2024, 46(9): 1600-1607. |
| [3] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [4] | Hai Wang,Guirong Zhang,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-modal Data Mining Algorithm for Corner Case of Automatic Driving Road Scene [J]. Automotive Engineering, 2024, 46(7): 1239-1248. |
| [5] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [6] | Guodong Wang,Li Liu,Yu Meng,Haiping Du,Guoxing Bai,Qing Gu. Research on Collision Avoidance Limit of Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(6): 985-994. |
| [7] | Guodong Du,Yuan Zou,Xudong Zhang,Wenjing Sun,Wei Sun. Research on Automatic Driving Motion Control Based on Double Estimator Reinforcement Learning Combined with Forward Predictive Control [J]. Automotive Engineering, 2024, 46(4): 564-576. |
| [8] | Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios [J]. Automotive Engineering, 2024, 46(3): 396-406. |
| [9] | Haifeng Sang,Zishan Zhao,Jinyu Wang,Wangxing Chen. Research on Adversarial Attacks and Robustness in Vehicle Trajectory Prediction [J]. Automotive Engineering, 2024, 46(3): 407-417. |
| [10] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [11] | Biao Yang, Zhiwen Wei, Rongrong Ni, Hai Wang, Yingfeng Cai, Changchun Yang. Efficient Pedestrian Crossing Intention Anticipation Based on Action-Conditioned Interaction [J]. Automotive Engineering, 2024, 46(1): 29-38. |
| [12] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [13] | Jing Lian,Shuoxian Li,Yidi Liu,Dongfang Yang,Linhui Li. Goal Supervised Attention Network for Vehicle Trajectory Prediction [J]. Automotive Engineering, 2023, 45(8): 1353-1361. |
| [14] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [15] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |