Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (6): 985-994.doi: 10.19562/j.chinasae.qcgc.2024.06.005
Previous Articles Next Articles
Guodong Wang1,2,Li Liu1,Yu Meng1( ),Haiping Du2,Guoxing Bai1,Qing Gu1
),Haiping Du2,Guoxing Bai1,Qing Gu1
Received:2023-11-23
Revised:2024-01-10
Online:2024-06-25
Published:2024-06-19
Contact:
Yu Meng
E-mail:myu@ustb.edu.cn
Guodong Wang,Li Liu,Yu Meng,Haiping Du,Guoxing Bai,Qing Gu. Research on Collision Avoidance Limit of Autonomous Vehicles[J].Automotive Engineering, 2024, 46(6): 985-994.
"

"
"
"
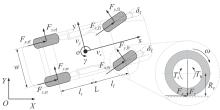
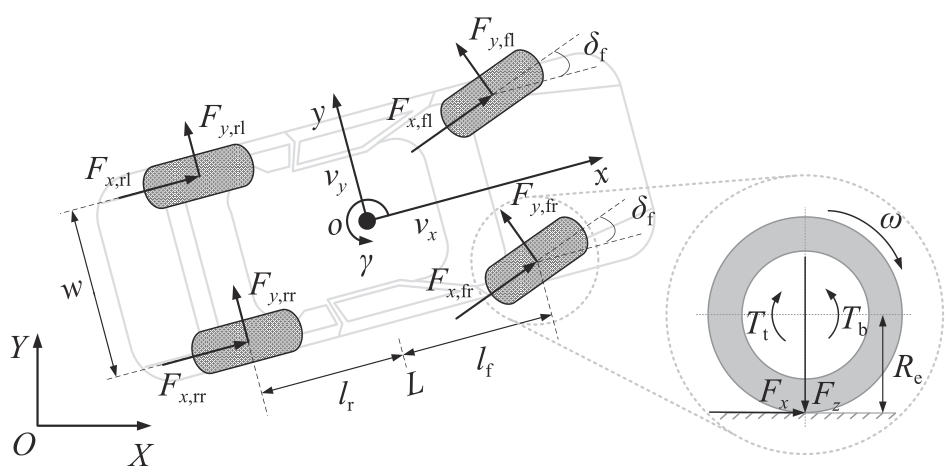
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| vx | 纵向车速 | w | 轮距 |
| vy | 侧向车速 | m | 整车质量 |
| 横摆角速度 | Iz | 整车横摆惯量 | |
| 横摆角 | 车轮转动惯量 | ||
| 前轮转角 | 车轮旋转角速度 | ||
| Fy | 侧向轮胎力 | 车轮有效滚动半径 | |
| Fx | 纵向轮胎力 | 制动力矩 | |
| lf | 质心至前轴距离 | 驱动力矩 | |
| lr | 质心至后轴距离 | fl,fr,rl,rr | 左前/右前/左后/右后轮 |
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m | 1 231 kg | w | 1.481 m |
| Iz | 2 031.4 kg?m2 | 0.6 kg?m2 | |
| lf | 1.04 m | 0.298 m | |
| lr | 1.56 m | 13.760 3° |
"
"
"
"
"
"
"
"
"
"
| 1 | ZHOU M, WANG H, ZENG X, et al. Mortality, morbidity, and risk factors in China and its provinces, 1990–2017: a systematic analysis for the Global Burden of Disease Study 2017[J]. The Lancet, 2019, 394(10204): 1145-1158. |
| 2 | DISTNER M, BENGTSSON M Q, BROBERG T, et al. City safety-a system addressing rear-end collisions at low speeds[C].Proc. 21st International Technical Conference on the Enhanced Safety of Vehicles, 2009 (09-0371). |
| 3 | ZHANG R, LI K, WU Y, et al. A multi-vehicle longitudinal trajectory collision avoidance strategy using AEBS with vehicle-infrastructure communication[J]. IEEE Transactions on Vehicular Technology, 2022(2):71. |
| 4 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2016, 66(2): 952-964. |
| 5 | LI S, WANG G, CHEN G, et al. Tire state stiffness prediction for improving path tracking control during emergency collision avoidance[J]. IEEE Access, 2019, 7:179658-179669. |
| 6 | 李霖, 朱西产. 智能汽车自动紧急控制策略[J]. 同济大学学报(自然科学版), 2015, 43(11): 1735-1742. |
| LI L, ZHU X. Autonomous emergency control algorithm for intelligent vehicles[J]. Journal of Tongji University(Natural Science), 2015, 43(11): 1735-1742. | |
| 7 | FALCONE P, TSENG H E, ASGARI J, et al. Integrated braking and steering model predictive control approach in autonomous vehicles[J]. IFAC Proceedings Volumes, 2007, 40(10): 273-278. |
| 8 | ARARAT O, KURAL E, GUVENC B A. Development of a collision warning system for adaptive cruise control vehicles using a comparison analysis of recent algorithms[C]. 2006 IEEE Intelligent Vehicles Symposium. IEEE, 2006: 194-199. |
| 9 | SEILER P, SONG B, HEDRICK J K. Development of a collision avoidance system[J]. SAE Transactions, 1998: 1334-1340. |
| 10 | WANG J, ZHANG X, KANG H, et al. Test method and risk factor definition of forward collision warning system[J]. IEEE Access, 2020, 8: 47730-47740. |
| 11 | 李霖, 朱西产, 陈海林. 驾驶员制动和转向避撞极限[J]. 同济大学学报(自然科学版), 2016, 44(11): 1743-1748. |
| LI L, ZHU X, CHEN H. Drivers’ collision avoidance limit by braking and steering[J]. Journal of Tongji University(Natural Science), 2016, 44(11): 1743-1748. | |
| 12 | LI S, ZHAO Q. Research on the emergency obstacle avoidance strategy of intelligent vehicles based on a safety distance model[J]. IEEE Access, 2023. |
| 13 | WU H, LI Y, WU C, et al. A longitudinal minimum safety distance model based on driving intention and fuzzy reasoning[C]. 2017 4th International Conference on Transportation Information and Safety (ICTIS). IEEE, 2017: 158-162. |
| 14 | 袁伟, 蒋拯民, 郭应时. 制动与转向协调动作的车辆避撞控制研究[J]. 中国公路学报, 2019 32(1): 173-181. |
| YUAN W, JIANG Z, GUO Y. Research on vehicle active collision avoidance system based on the coordinated actions of braking and steering [J]. China Journal of Highway and Transport, 2019, 32(1): 173. | |
| 15 | SHAH J, BEST M, BENMIMOUN A, et al. Autonomous rear-end collision avoidance using an electric power steering system[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(12): 1638-1655. |
| 16 | ECKERT A, HARTMANN B, SEVENICH M, et al. Emergency steer & brake assist: a systematic approach for system integration of two complementary driver assistance systems[C]. 22nd International Technical Conference on the Enhanced Safety of Vehicles (ESV), 2011: 13-16. |
| 17 | HATTORI Y, ONO E, HOSOE S. An optimum vehicle trajectory control for obstacle avoidance with the shortest longitudinal traveling distance[C]. IEEE International Conference on Mechatronics & Automation. IEEE, 2008. |
| 18 | MARTENSSON J, NYBACKA M, JERRELIND J, et al. Evaluation of safety distance in vehicle platoons by combined braking and steering[C]. 11th International Symposium on Advanced Vehicle Control, Sept 9-12, 2012, Seoul, Korea. Japan Society of Mechanical Engineers (JSAE), 2012. |
| 19 | HAJILOO R, ABROSHAN M, KHAJEPOUR A, et al. Integrated steering and differential braking for emergency collision avoidance in autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, PP(99):1-12. |
| 20 | WANG G, LIU L, MENG Y, et al. Integrated path tracking control of steering and differential braking based on tire force distribution[J]. International Journal of Control, Automation and Systems, 2022, 20(2):536-550. |
| 21 | WANG G, DU H, MENG Y, et al. Integrated path tracking control based on the dimension reduction model for improving real-time performance[J]. Vehicle System Dynamics, 2023: 1-21. |
| 22 | PACEJKA H B. Tire and vehicle dynamics[M]. 3rd ed. Great Britain: Elsevier Ltd, 2012. |
| 23 | 魏强. 车辆纵向力与侧向力集成控制研究[D]. 杭州: 浙江大学, 2015. |
| WEI Q. Research of the integrate control on vehicle longitude force and lateral force[D]. Hangzhou: Zhejiang University, 2015. | |
| 24 | WANG G, LIU Y, LI S, et al. New integrated vehicle stability control of active front steering and electronic stability control considering tire force reserve capability[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2181-2195. |
| 25 | 徐少兵, 李升波, 成波. 最优控制问题的 Legendre 伪谱法求解及其应用[J]. 控制与决策, 2014, 29(12): 2113-2120. |
| XU S B, LI S B, CHENG B. Theory and application of legendre pseudo-spectral method for solving optimal control problem[J]. Control and Decision, 2014, 29(12): 2113-2120. | |
| 26 | 杨希祥, 张为华. 基于Gauss 伪谱法的空空导弹最优中制导律设计[J]. 国防科技大学学报, 2013, 35(1): 28-32. |
| YANG X, ZHANG W. Midcourse guidance law optimal design for air-to-air missiles based on Gauss Pseudospectral Method[J]. Journal of National University of Defense Technology, 2013, 35(1): 28-32. | |
| 27 | 刘超越, 张成. 基于高斯伪谱法的二级助推战术火箭多阶段轨迹优化[J]. 兵工学报, 2019, 40(2): 292. |
| LIU C, ZHANG C. Multi-stage trajectory optimization of tactical two-stage booster rocket based on gauss pseudospectral method[J]. Acta Armamentarii, 2019, 40(2): 292. | |
| 28 | 唐晓峰, 杨林, 袁静妮. 基于高斯伪谱法的自动驾驶车辆状态研究[J]. 汽车工程, 2020, 42(5): 567-573. |
| TANG X, YANG L, YUAN J. Study on the states of autonomous vehiclebased on gaussian pseudospectral method[J]. Automotive Engineering, 2020, 42(5): 567-573. | |
| 29 | 钱立军, 吴冰, 仇多洋, 等. 基于分段高斯伪谱法的平行自主泊车路径规划[J]. 汽车工程, 2019, 41(12): 1401-1409. |
| QIAN L, WU B, QIU D, et al. Path planning for autonomous parallel parking based on piecewise Gauss pseudospectral method[J]. Automotive Engineering, 2019, 41(12): 1401-1409. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [3] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [4] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [5] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [6] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [7] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [8] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [9] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [10] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |
| [11] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [12] | Xingjia Li,Jianfen Li,Min Zhu,Nengling Peng,Shuai Zuo. Research on Positioning Fusion and Verification Algorithm Based on UKF [J]. Automotive Engineering, 2021, 43(6): 825-832. |
| [13] | Huei Peng. Autonomous Vehicles—the Remaining Challenges [J]. Automotive Engineering, 2021, 43(4): 451-458. |
| [14] | Xiangyang Xu,Wenhao Hu,Honglei Dong,Yan Wang,Lingyun Xiao,Penghui Li. Review of Key Technologies for Autonomous Vehicle Test Scenario Construction [J]. Automotive Engineering, 2021, 43(4): 610-619. |
| [15] | Rong Wang,Yafu Sun,Juan Song. Evaluation Method and Test Verification of Road Test Scenes for Autonomous Vehicles [J]. Automotive Engineering, 2021, 43(4): 620-628. |
|