Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (11): 1993-2004.doi: 10.19562/j.chinasae.qcgc.2024.11.006
Previous Articles Next Articles
Hailun Zhang,Guangwei Wang,Qingwen Meng,Qing Xu,Jianqiang Wang( ),Keqiang Li
),Keqiang Li
Received:2024-04-13
Revised:2024-05-26
Online:2024-11-25
Published:2024-11-22
Contact:
Jianqiang Wang
E-mail:wjqlws@tsinghua.edu.cn
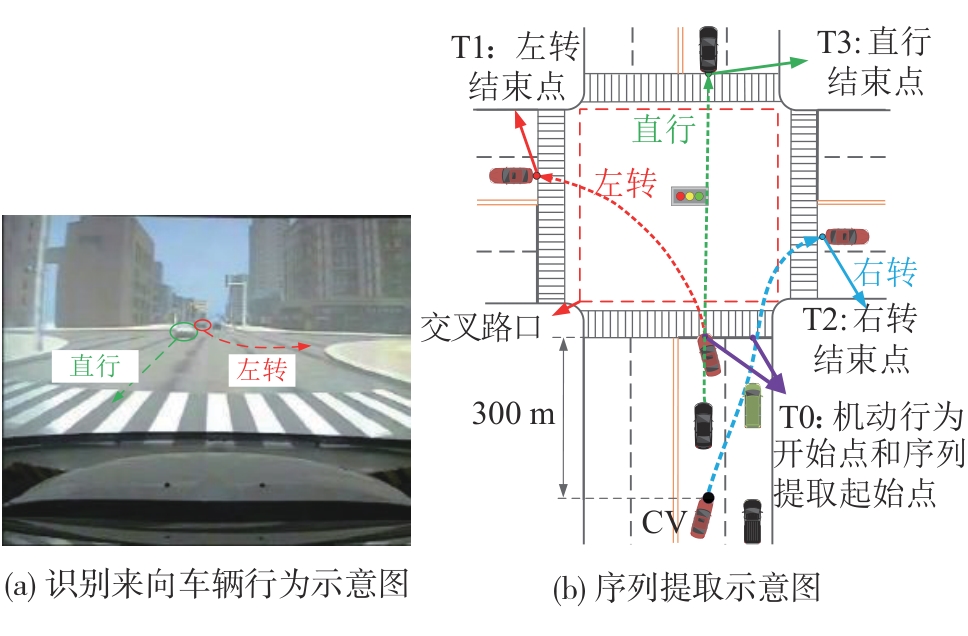
Hailun Zhang,Guangwei Wang,Qingwen Meng,Qing Xu,Jianqiang Wang,Keqiang Li. An Online Semi-supervised Hybrid Approach for Vehicle Behavior Perception at Intersections[J].Automotive Engineering, 2024, 46(11): 1993-2004.

"

"

"

"

"
"

"
"
| 算法 | TL/% | TR/% | GS/% | 平均准确率/% |
|---|---|---|---|---|
| SVM | 76.2±3.5 | 73.1±2.7 | 74.6±3.2 | 74.8±3.5 |
| HMM | 72.5±2.9 | 69.7±2.7 | 70.1±2.4 | 71.7±3.8 |
| HMM-BF | 80.4±4.5 | 78.6±3.7 | 78.4±2.4 | 79.2±5.7 |
| NB | 78.2±3.3 | 77.2±3.5 | 76.4±4.1 | 77.5±4.5 |
| K-NN | 76.6±2.5 | 72.5±3.2 | 73.4±6.2 | 75.0±1.5 |
| LSTM-50 | 62.0±1.9 | 59.2±2.9 | 58.4±2.1 | 59.5±3.5 |
| LSTM-int | 83.5±4.3 | 81.4±3.1 | 81.9±2.8 | 82.4±4.3 |
| SSL-K-NN | 78.6±4.2 | 76.1±3.7 | 76.9±3.5 | 77.5±4.4 |
| EL-SSL-10 | 84.1±4.2 | 79.4±5.7 | 82.1±4.6 | 81.2±5.7 |
| EL-SSL-30 | 85.8±3.4 | 81.4±5.2 | 82.9±4.3 | 83.8±1.4 |
| EL-SSL-50 | 86.8±5.3 | 84.5±2.8 | 85.1±2.7 | 85.9±3.4 |
"
| 算法 | TL/% | TR/% | GS/% | 平均准确率/% |
|---|---|---|---|---|
| SVM | 85.7±2.4 | 79.3±2.1 | 80.9±3.2 | 82.1±3.6 |
| HMM | 78.8±3.1 | 76.0±3.2 | 75.4±3.2 | 76.8±4.8 |
| HMM-BF | 85.5±4.7 | 83.2±4.3 | 82.4±2.4 | 84.1±3.6 |
| NB | 85.1±3.1 | 84.4±3.0 | 84.0±3.2 | 84.9±4.0 |
| K-NN | 86.0±3.3 | 85.7±3.5 | 84.2±2.1 | 84.9±1.8 |
| LSTM-50 | 63.4±5.2 | 61.4±2.7 | 64.1±4.1 | 63.2±2.9 |
| LSTM-int | 89.9±2.9 | 87.4±2.7 | 88.0±3.0 | 88.9±2.4 |
| SSL-K-NN | 87.3±1.5 | 83.5±1.7 | 83.4±3.6 | 84.9±2.8 |
| EL-SSL-10 | 91.2±4.6 | 86.3±3.2 | 86.9±2.2 | 88.6±2.1 |
| EL-SSL-30 | 93.2±3.5 | 88.9±4.5 | 89.1±3.6 | 91.2±2.5 |
| EL-OSS-50 | 93.9±1.2 | 91.0±2.5 | 90.1±1.1 | 92.1±2.9 |
"
| 算法 | TL/% | TR/% | GS/% | 平均准确率/% |
|---|---|---|---|---|
| SVM | 88.2±2.1 | 86.2±1.9 | 86.0±1.8 | 87.1±4.2 |
| HMM | 84.3±2.2 | 82.5±4.1 | 81.3±4.4 | 83.8±3.5 |
| HMM-BF | 88.3±2.5 | 86.7±3.2 | 87.4±3.4 | 87.8±3.1 |
| NB | 88.1±4.3 | 87.6±4.5 | 86.9±1.5 | 87.5±2.3 |
| K-NN | 88.9±2.5 | 87.6±1.7 | 87.7±1.9 | 88.5±3.9 |
| LSTM-50 | 71.5±6.1 | 70.2±3.5 | 69.8±4.7 | 69.8±4.5 |
| LSTM-int | 94.9±3.2 | 93.4±1.5 | 93.0±3.2 | 94.3±5.1 |
| SSL-K-NN | 93.4±2.0 | 90.9±3.8 | 92.7±5.2 | 92.3±3.2 |
| EL-SSL-10 | 94.0±2.0 | 92.2±2.5 | 93.1±2.5 | 93.6±2.5 |
| EL-SSL-30 | 96.2±2.4 | 93.5±1.9 | 95.1±1.5 | 94.9±1.1 |
| EL-SSL-50 | 97.0±2.2 | 94.1±3.5 | 94.8±1.6 | 95.6±2.1 |
"
"

| 1 | FENG S, SUN H, YAN X, et al. Dense reinforcement learning for safety validation of autonomous vehicles[J]. Nature, 2023, 615(7953): 620-627. |
| 2 | SCHNEIDER J, MEADOWS G, MATHISON S R, et al. Validation and sensitivity studies for SAE J2601, the light duty vehicle hydrogen fueling standard[J]. SAE International Journal of Alternative Powertrains, 2014, 3(2): 257-309. |
| 3 | 田彦涛, 赵凤凯, 聂光明. 考虑驾驶习惯的驾驶员换道意图识别 [J/OL]. 吉林大学学报(工学版), 2020: 1-9. |
| TIAN Y T, ZHAO F K, NIE G M. Driver's lane change intention recognition considering driving habits [J/OL]. Journal of Jilin University (Engineering and Technology Edition), 2020: 1-9. | |
| 4 | 刘通, 付锐, 马勇, 等. 考虑驾驶人风格的跟车预警规则研究 [J]. 中国公路学报, 2020, 33(2): 170-180. |
| LIU T, FU R, MA Y, et al. Car-following warning rules considering driving styles [J]. China Journal of Highway and Transport, 2020, 33(2): 170-180. | |
| 5 | LI Y, LIU F, XING L, et al. A deep learning framework to explore influences of data noises on lane-changing intention prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2024. |
| 6 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测 [J]. 中国公路学报, 2019, 32(6): 34-42. |
| JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network [J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 7 | 郭景华, 李克强, 王进, 等. 基于危险场景聚类分析的前车随机运动状态预测研究 [J]. 汽车工程, 2020, 42(7): 847-853,859. |
| GUO J H, LI K Q, WANG J, et al. Study on prediction of preceding vehicle's stochastic motion based on risk scenarios clustering analysis [J]. Automotive Engineering, 2020, 42(7): 847-853,859. | |
| 8 | 付锐, 张海伦, 刘文晓, 等. 驾驶人意图识别综述[J].长安大学学报(自然科学版),2022,42(1): 33-60. |
| FU R, ZHANG H L, LIU W X, et al. Review on driver intention recognition [J]. Journal of Chang’an University (Natural Science Edition), 2022,42(1): 33-60. | |
| 9 | 张海伦, 付锐, 袁伟, 等. 面向前车的驾驶行为感知与意图识别算法研究 [J]. 中国公路学报, 2022, 35 (6): 299-311. |
| ZHANG H L, FU R, YUAN W, et al. Research on algorithms of driving behavior perception and intention recognition oriented to the vehicle front [J]. China Journal of Highway and Transport, 2022, 35 (6): 299-311. | |
| 10 | BOCKLISCH F, BOCKLISCH S F, BEGGIATO M, et al. Adaptive fuzzy pattern classification for the online detection of driver lane change intention[J]. Neurocomputing, 2017, 262: 148-158. |
| 11 | ZHANG M, FU R, MORRIS D D, et al. A framework for turning behavior classification at intersections using 3D LIDAR[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7431-7442. |
| 12 | ZYNER A, WORRALL S, NEBOT E. Naturalistic driver intention and path prediction using recurrent neural networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(4): 1584-1594. |
| 13 | LEFÈVRE S, VASQUEZ D, LAUGIER C. A survey on motion prediction and risk assessment for intelligent vehicles[J]. ROBOMECH Journal, 2014, 1(1): 1-14. |
| 14 | ZHANG H, FU R, WANG C, et al. Turning maneuver prediction of connected vehicles at signalized intersections: a dictionary learning-based approach[J]. IEEE Internet of Things Journal, 2022, 9(22): 23142-23159. |
| 15 | 张一鸣, 周兵, 吴晓建, 等. 基于前车轨迹预测的高速智能车运动规划 [J]. 汽车工程, 2020, 42(5): 574-580,587. |
| ZHANG Y M, ZHOU B, WU X J, et al. Motion planning of high-speed intelligent vehicle based on front vehicle trajectory prediction [J]. Automotive Engineering, 2020, 42(5): 574-580,587. | |
| 16 | TOLEDO-MOREO R, ZAMORA-IZQUIERDO M A. IMM-based lane-change prediction in highways with low-cost GPS/INS[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 180-185. |
| 17 | WU C, PENG L, HUANG Z, et al. A method of vehicle motion prediction and collision risk assessment with a simulated vehicular cyber physical system [J]. Transportation Research Part C: Emerging Technologies, 2014, 47:179-191. |
| 18 | 谢枫, 娄静涛, 赵凯, 等. 基于行为识别和曲率约束的车辆轨迹预测方法研究 [J]. 汽车工程, 2019, 41(9): 1036-1042. |
| XIE L, LOU J T, ZHAO K, et al. A research on vehicle trajectory prediction method based on behavior recognition and curvature constraints [J]. Automotive Engineering, 2019, 41(9): 1036-1042. | |
| 19 | 刘创, 梁军. 基于注意力机制的车辆运动轨迹预测 [J]. 浙江大学学报(工学版), 2020, 54(6): 1156-1163. |
| LIU C, LIANG J. Vehicle motion trajectory prediction based on attention mechanism [J]. Journal of Zhejiang University (Engineering Science), 2020, 54(6): 1156-1163. | |
| 20 | 张涛, 邹渊, 张旭东, 等. 网联车辆并线预测与巡航控制的研究 [J]. 汽车工程, 2020, 42(2): 250-256. |
| ZHANG T, ZHOU Y, ZHANG X D, et al. Research on merging prediction and cruise control for connected vehicles [J]. Automotive Engineering, 2020, 42(2): 250-256. | |
| 21 | SUN J, QI X, XU Y, et al. Vehicle turning behavior modeling at conflicting areas of mixed-flow intersections based on deep learning [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(9): 3674-3685. |
| 22 | XING Y, LV C, CAO D. Personalized vehicle trajectory prediction based on joint time-series modeling for connected vehicles [J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1341-1352. |
| 23 | ZHANG M, FU R, MORRIS D D, et al. A framework for turning behavior classification at intersections using 3D LIDAR [J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7431-7442. |
| 24 | GADEPALLY V, KRISHNAMURTHY A, OZGUNER U. A framework for estimating driver decisions near intersections [J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 637-646. |
| 25 | 易丹辉, 王燕. 应用时间序列分析 [M]. 5版.北京:中国人民大学出版社, 2019. |
| YI D H, WANG Y. Applied time series analysis[M]. 5 th ed. Beijing: China Renmin University Press, 2019. | |
| 26 | HAZAN E, AGARWAL A, KALE S. Logarithmic regret algorithms for online convex optimization[J]. Machine Learning, 2007, 69(2-3): 169-192. |
| 27 | ZINKEVICH M. Online convex programming and generalized infinitesimal gradient ascent [C]. Proceedings of the 20th International Conference on Machine Learning (ICML-03),2003: 928-936. |
| 28 | ANAVA O, HAZAN E, MANNOR S, et al. Online learning for time series prediction[C].Conference on Learning Theory, 2013: 172-184. |
| 29 | SHAO J, TAN Y, GAO L, et al. Synchronization-based clustering on evolving data stream [J]. Information Sciences, 2019, 501: 573-587. |
| [1] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [2] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [3] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [4] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [5] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [6] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [7] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [8] | Mengfan Li,Zhongxiang Feng,Weihua Zhang,Jingyu Li. Study on Driver's Visual Transfer Characteristics During the Takeover Process of Human-Computer Co-driving Mode [J]. Automotive Engineering, 2024, 46(5): 795-804. |
| [9] | Fuxing Yao,Chao Sun,Yungang Lan,Bing Lu,Bo Wang,Haiyang Yu. A Lane Change Decision Method for Intelligent Connected Vehicles Based on Mixture of Expert Model [J]. Automotive Engineering, 2024, 46(5): 882-892. |
| [10] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [11] | Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios [J]. Automotive Engineering, 2024, 46(3): 396-406. |
| [12] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [13] | Xiaolin Tang,Lu Gan,Guofa Li,Keqiang Li,Wenbo Chu. Large Model Alignment Technology for Autonomous Driving: A Review [J]. Automotive Engineering, 2024, 46(11): 1937-1951. |
| [14] | Song Gao,Jianglin Zhou,Bolin Gao,Jian Lu,He Wang,Yueyun Xu. Pedestrian Trajectory Prediction Method Based on Multi-information Fusion Network [J]. Automotive Engineering, 2024, 46(11): 1973-1982. |
| [15] | Zhijun Chen,Chaowei Wang,Chaozhong Wu,Chuang Qian,Huaizhu Wu,Guangjun Shen. Algorithm for Detecting Free Space in Underground Mine Tunnels for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(11): 2017-2027. |