Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (1): 55-66.doi: 10.19562/j.chinasae.qcgc.2025.01.006
Previous Articles Next Articles
Peng Chen,Yingfeng Cai( ),Haibo Yuan,Long Chen,Xiaoqiang Sun
),Haibo Yuan,Long Chen,Xiaoqiang Sun
Received:2024-06-02
Revised:2024-06-30
Online:2025-01-25
Published:2025-01-17
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
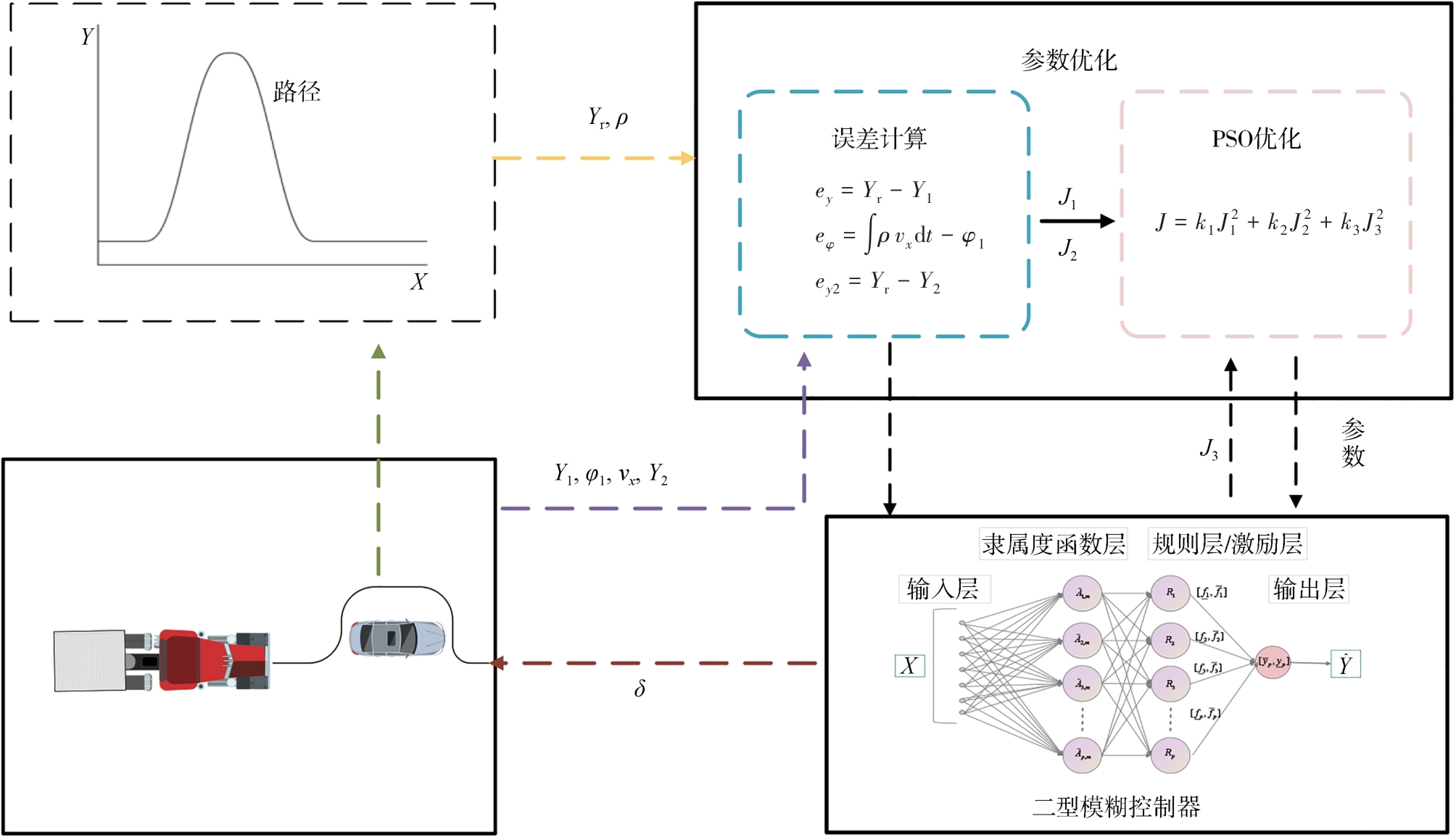
Peng Chen,Yingfeng Cai,Haibo Yuan,Long Chen,Xiaoqiang Sun. Research on Semi-Trailer Trajectory Tracking Based on Type-2 Fuzzy Logic Control[J].Automotive Engineering, 2025, 47(1): 55-66.

"

"
"
"
| NL | NS | ZE | PS | PL | |
|---|---|---|---|---|---|
| NL | NL | NL | NS | NS | NS |
| NS | NL | NL | NL | NL | ZE |
| ZE | NS | NS | ZE | PS | PL |
| PS | NS | ZE | PS | PS | PL |
| PL | PS | PS | PL | PL | PL |

"
"
| 参数 | 数值 |
|---|---|
"
"

"
"
"

"
"
"
"
"
"
"
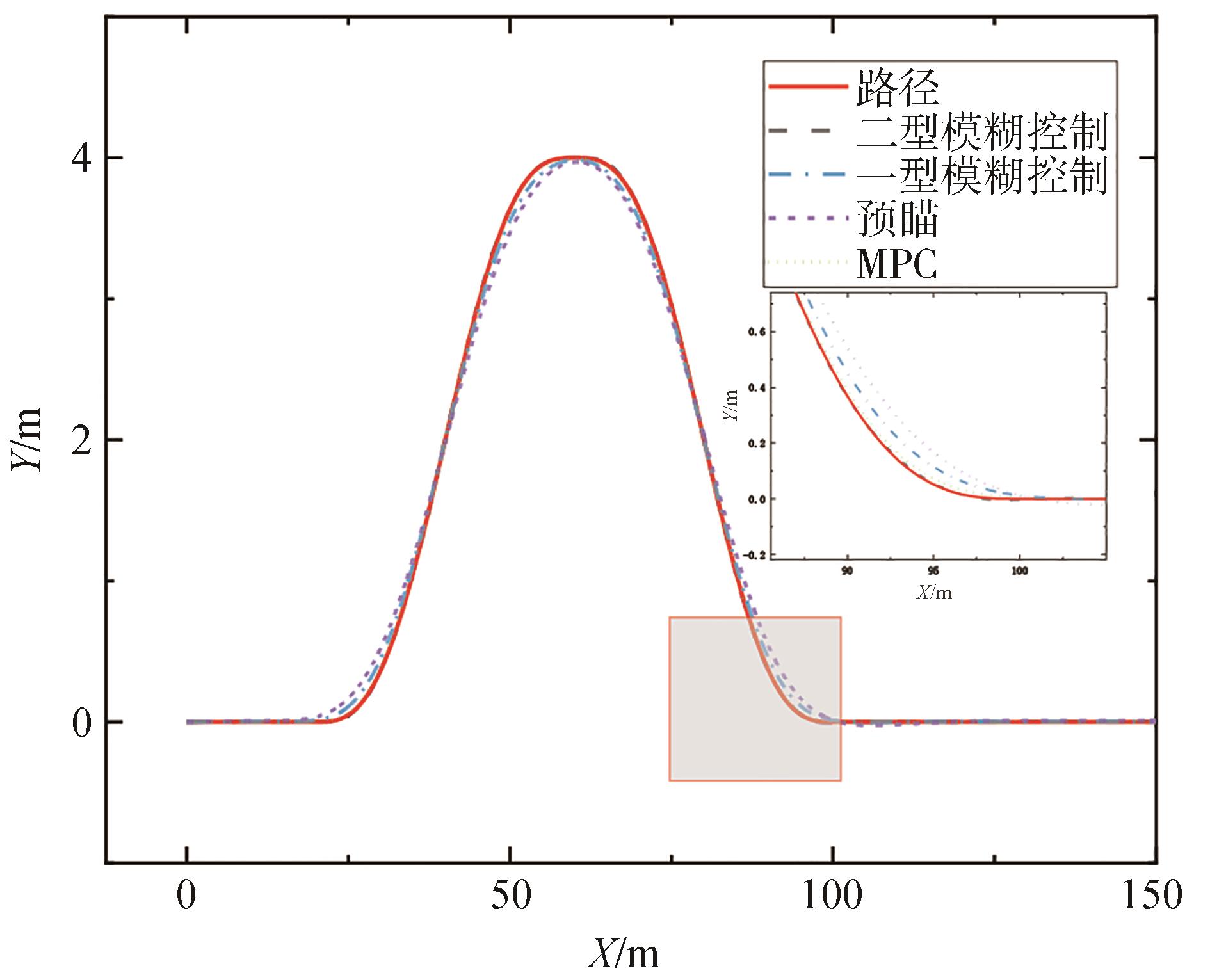
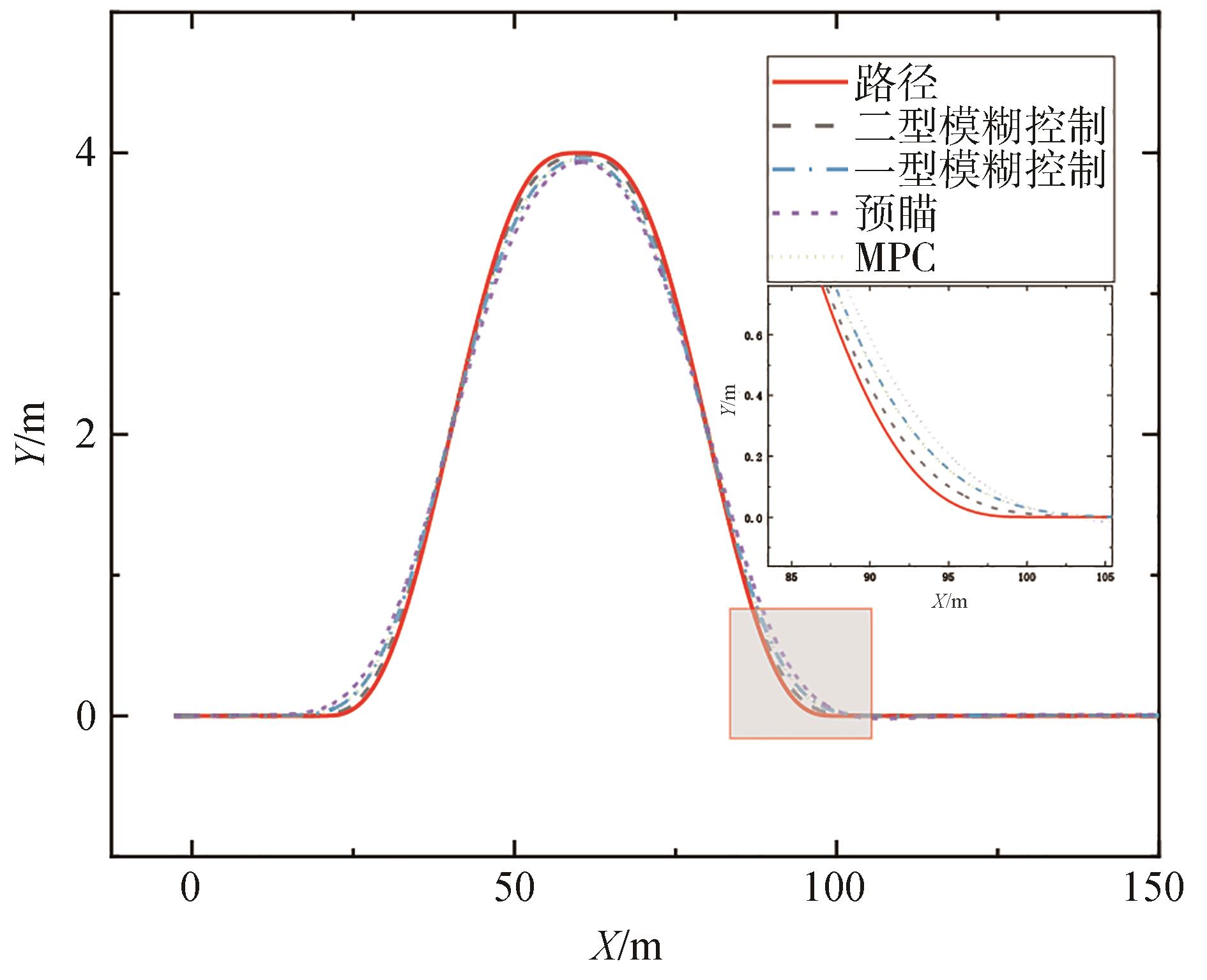
| 项目 | 二型模糊控制 | 一型模糊控制 | 预瞄控制 | MPC |
|---|---|---|---|---|
| 牵引车/m | 0.001 545 | 0.019 164 | 0.032 16 | 0.009 71 |
| 挂车/m | 0.012 8 | 0.017 4 | 0.033 3 | 0.017 2 |
"
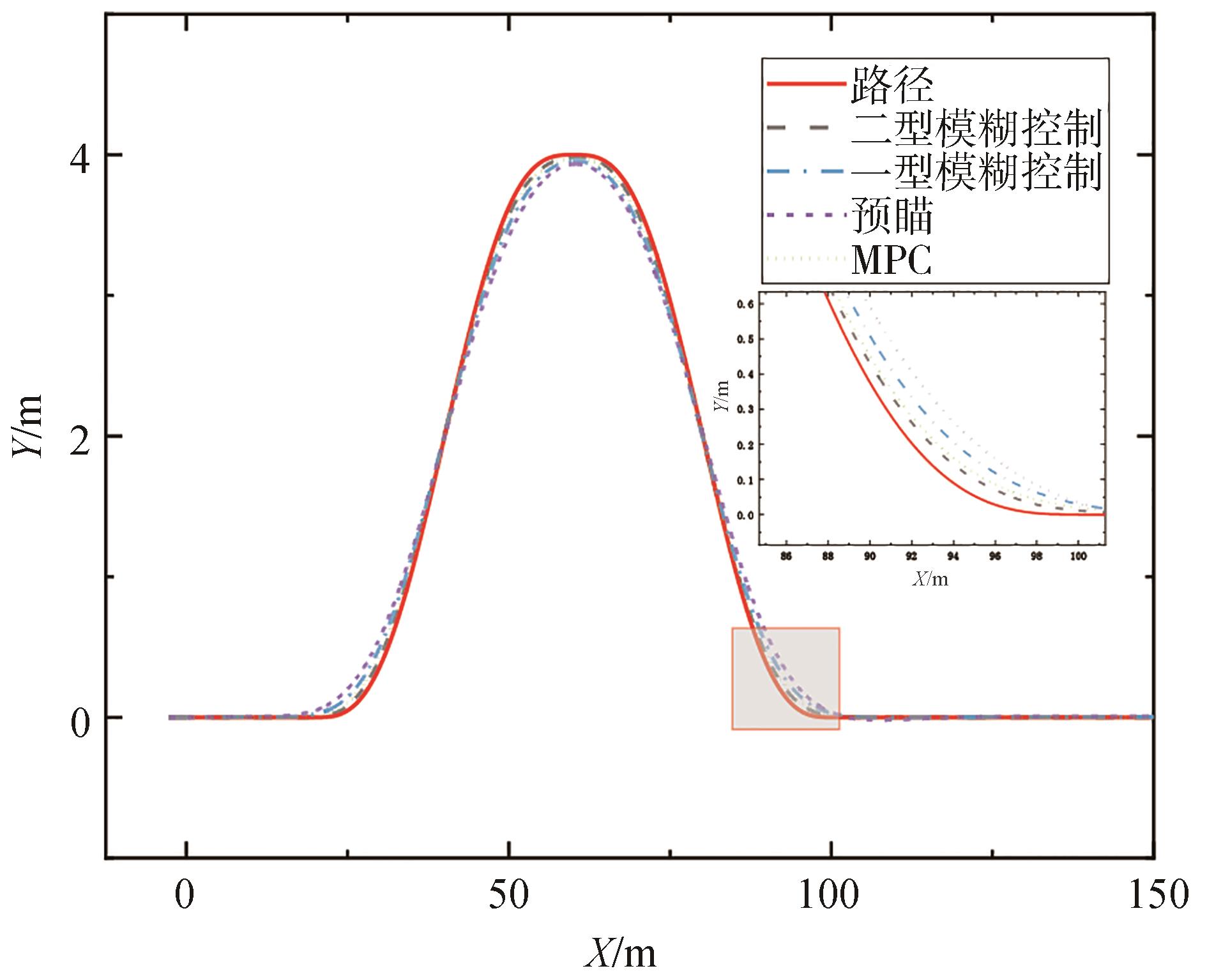
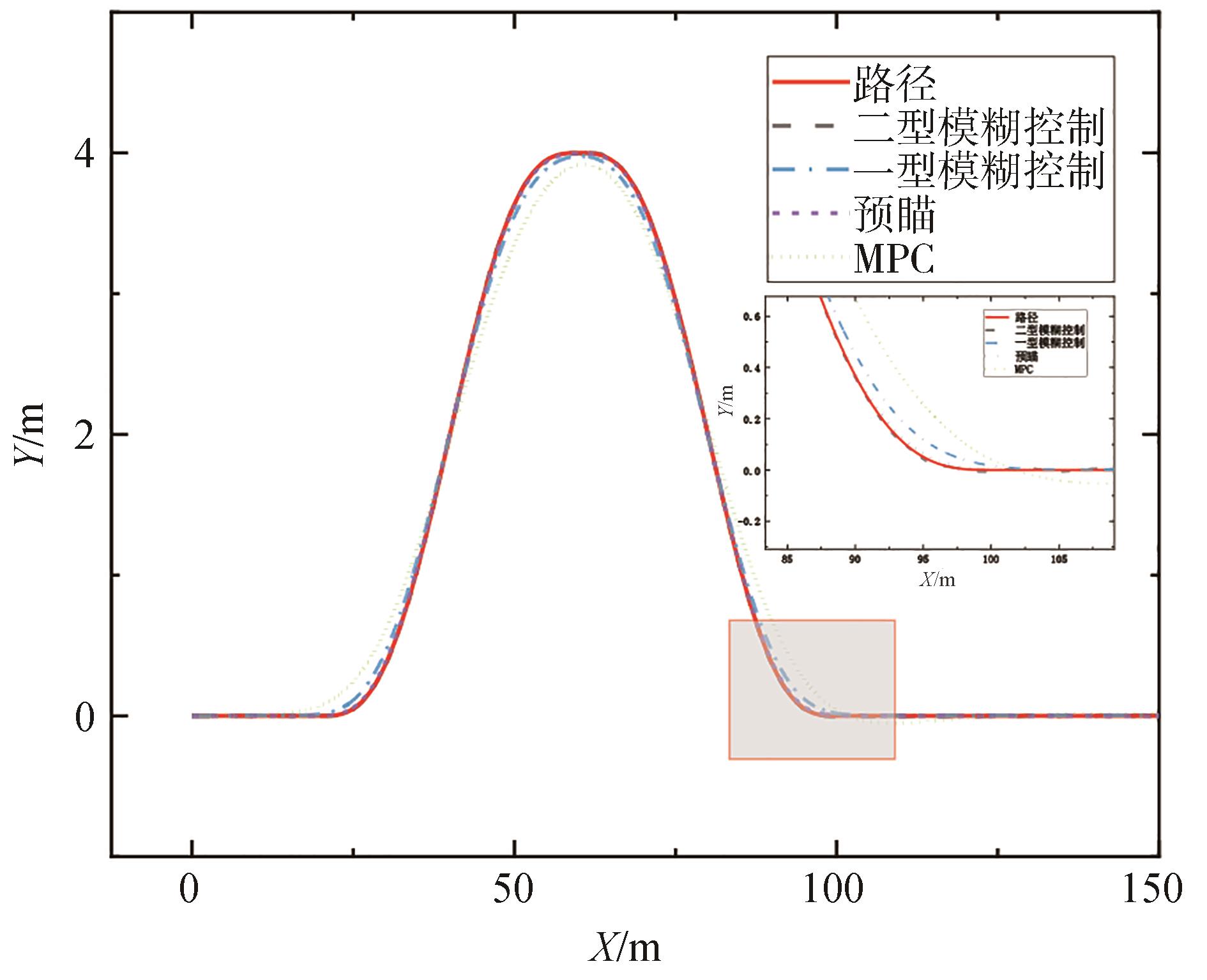
| 项目 | 二型模糊控制 | 一型模糊控制 | 预瞄控制 | MPC |
|---|---|---|---|---|
| 牵引车/m | 0.006 881 | 0.021 20 | 0.051 496 | 0.012 31 |
| 挂车/m | 0.015 224 | 0.021 13 | 0.084 910 | 0.022 20 |
"
"
"
"
"
| 项目 | 二型模糊控制 | 一型模糊控制 | 预瞄控制 | MPC |
|---|---|---|---|---|
| 牵引车/m | 0.002 12 | 0.009 30 | 0.010 20 | 0.004 27 |
| 挂车/m | 0.010 83 | 0.014 33 | 0.023 23 | 0.027 50 |
"
| 项目 | 二型模糊控制 | 一型模糊控制 | 预瞄控制 | MPC |
|---|---|---|---|---|
| 牵引车/m | 0.004 231 | 0.019 740 | 0.032 13 | 0.023 21 |
| 挂车/m | 0.012 014 | 0.025 583 | 0.063 29 | 0.101 20 |
| 1 | TANG X, YAN Y, WANG B, et al. Adaptive articulation angle preview-based path-following algorithm for tractor-semitrailer using optimal control [J]. Sensors (Basel), 2022, 22(14):5163. |
| 2 | WANG Z H, CHEN L, CAI Y F, et al. Adaptive coordinated control strategy for autonomous vehicles based on four-wheel steering [J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering,2023:1-16. |
| 3 | XU X, ZHANG L, JIANG Y, et al. Active control on path following and lateral stability for truck-trailer combinations [J]. Arabian Journal for Science and Engineering, 2018, 44(2): 1365-1377. |
| 4 | NI Zhituo, HE Yuping. Design and validation of a robust active trailer steering system for multi-trailer articulated heavy vehicles(Article) [J]. Vehicle System Dynamics,2019,57(10): 1545-1571. |
| 5 | YU X, WANG H, TENG C, et al. DGPR-MPC: learning-based model predictive controller for autonomous vehicle path following [J]. IET Intelligent Transport Systems, 2023,17(10): 1992-2003. |
| 6 | ESMAEILI N. An adaptive sliding mode controller for the lateral control of articulated long vehicles [J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(3): 487-515. |
| 7 | DENG Z W, JIN Y H, GAO W, et al. A closed-loop directional dynamics control with LQR active trailer steering for articulated heavy vehicle [J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2023, 237(12): 2741-2758. |
| 8 | ZHANG Y, WANG W, WANG W, et al. An adaptive constrained path following control scheme for autonomous electric vehicles [J]. IEEE Transactions on Vehicular Technology, 2022, 71(4): 3569-3578. |
| 9 | CHEN X, YAO Q. Dual predictive model adaptive switching control for directional control of tractor semitrailer combinations [J]. Advances in Mechanical Engineering, 2023, 15(8):1-16. |
| 10 | LENG Z, MINOR M A. Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation [J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 332-348. |
| 11 | YUAN J, SUN F, HUANG Y. Trajectory generation and tracking control for double-steering tractor-trailer mobile robots with on-axle hitching [J]. IEEE Transactions on Industrial Electronics, 2015, 62(12): 7665-7677. |
| 12 | WIDYOTRIATMO A, NAZARUDDIN Y Y, PUTRANTO M R F, et al. Forward and backward motions path following controls of a truck-trailer with references on the head-truck and on the trailer [J]. ISA Trans, 2020, 105: 349-366. |
| 13 | WEI Y, HE S, XU E, et al. Steady-state steering characteristics of mathematical model for semitrailer based on variations in camber parameters [J]. Shock and Vibration, 2020, 2020:1-14. |
| 14 | ZHANG C, HU J, QIU J, et al. A novel fuzzy observer-based steering control approach for path tracking in autonomous vehicles [J]. IEEE Transactions on Fuzzy Systems, 2018, 27(2):278-290. |
| 15 | ZHANG C, LAM H K, QIU J, et al. Fuzzy-model-based output feedback steering control in autonomous driving subject to actuator constraints [J]. IEEE Transactions on Fuzzy Systems, 2021, 29(3): 457-470. |
| 16 | CHEN Y, LU C, CHU W. A cooperative driving strategy based on velocity prediction for connected vehicles with robust path-following control [J]. IEEE Internet of Things Journal, 2020, 7(5): 3822-3832. |
| 17 | CHEN T, CHEN L, XU X, et al. Passive actuator-fault-tolerant path following control of autonomous ground electric vehicle with in-wheel motors [J]. Advances in Engineering Software, 2019, 134(C): 22-30. |
| 18 | 蔡英凤,秦顺琪,臧勇,等. 基于可拓优度评价的智能汽车横向轨迹跟踪控制方法[J].汽车工程,2019,41(10):1189-1196. |
| CAI Y F, QIN S Q, ZANG Y, et al. Lateral trajectory tracking control method of intelligent vehicle based on extension goodness evaluation [J]. Automotive Engineering, 2019,41(10):1189-1196. | |
| 19 | LIU W, CHEN G, KNOLL A. Matrix inequalities based robust model predictive control for vehicle considering model uncertainties, external disturbances, and time-varying delay[J]. Front. Neurorobot, 2021, 14: 1-16. |
| 20 | ZHU S, HE Y, REN J. On robust controllers for active steering systems of articulated heavy vehicles(Article) [J].International Journal of Heavy Vehicle Systems, 2019, 26(1): 1-30. |
| 21 | TAGHAVIFAR H, HU C, QIN Y, et al. EKF-neural network observer based type-2 fuzzy control of autonomous vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(8): 4788-4800. |
| 22 | LUO G, LI H, MA B, et al. Design and experimental research of observer-based adaptive type-2 fuzzy steering control for automated vehicles with prescribed performance[J]. Mechatronics, 2022, 81(C):1-16. |
| 23 | 王建波, 刘毅力, 梁继国. 基于差分进化粒子群算法的PSS参数优化与整定[J].计算机与数字工程,2018, 46(1): 53-58. |
| WANG J B,LIU Y L,LIANG J G. PSS parameter optimization and tuning based on differential evolution particle swarm optimization [J].Computer and Digital Engineering, 2018,46(1):53-58. | |
| 24 | 李道飞,查安飞,徐彪,等. 半挂汽车列车紧急避撞轨迹跟踪控制算法[J].汽车工程,2022,44(7):1098-1106. |
| LI D F,CHA A F,XU B, et al. Emergency collision avoidance trajectory tracking control algorithm of semi-trailer train[J]. Automotive Engineering,2022,44(7):1098-1106. | |
| 25 | YANG W, CAI Y, SUN X, et al. Trajectory tracking control of autonomous vehicles based on Lagrangian neural network dynamics model [J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2023,15(8): 1-16. |
| 26 | SARABAKHA A, FU C, KAYACAN E, et al. Type-2 fuzzy logic controllers made even simpler: from design to deployment for UAVs [J]. IEEE Transactions on Industrial Electronics, 2018, 65(6): 5069-5077. |
| 27 | WANG F, ZHANG H, LI K, et al. A hybrid particle swarm optimization algorithm using adaptive learning strategy[J]. Information Sciences, 2018, 436: 162-177. |
| [1] | Jiangkun Li,Ruixue Zong,Weiwen Deng,Ying Wang,Juan Ding. Directed Graph-Based Method for Evaluating Similarity in Urban Intersection Scenarios [J]. Automotive Engineering, 2025, 47(1): 23-34. |
| [2] | Zhengcai Yang,Huiquan Zhang,Linhe Ge,Tianjun Sun. Trajectory Tracking Control Method for Autonomous Vehicles Considering Time-Varying Reference and Steering Delay [J]. Automotive Engineering, 2025, 47(1): 44-54. |
| [3] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [4] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [5] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [6] | Fuwu Yan,Bowen Xiang,Jie Hu,Ruipeng Chen,Zhihao Zhang,Haoyan Liu,Chongzhi Gao. Lateral Control of Autonomous Light Truck Based on Improved LPV Model [J]. Automotive Engineering, 2024, 46(8): 1403-1413. |
| [7] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [8] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [9] | Hai Wang,Guirong Zhang,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-modal Data Mining Algorithm for Corner Case of Automatic Driving Road Scene [J]. Automotive Engineering, 2024, 46(7): 1239-1248. |
| [10] | Liming Xiao,Fawang Zhang,Liangfa Chen,Haoqi Yan,Fei Ma,Shengbo Eben Li,Jingliang Duan. Vehicle Trajectory Tracking and Collision Avoidance Control Based on Multi-style Reinforcement Learning [J]. Automotive Engineering, 2024, 46(6): 945-955. |
| [11] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [12] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [13] | Guodong Wang,Li Liu,Yu Meng,Haiping Du,Guoxing Bai,Qing Gu. Research on Collision Avoidance Limit of Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(6): 985-994. |
| [14] | Fuxing Yao,Chao Sun,Yungang Lan,Bing Lu,Bo Wang,Haiyang Yu. A Lane Change Decision Method for Intelligent Connected Vehicles Based on Mixture of Expert Model [J]. Automotive Engineering, 2024, 46(5): 882-892. |
| [15] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
|
||