Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (12): 2303-2313.doi: 10.19562/j.chinasae.qcgc.2025.12.003
Previous Articles Next Articles
Longlong Liu1,Wei Fan1,Han Xiao1,Yibo Zhang2( ),Bin Xu1
),Bin Xu1
Received:2025-06-16
Revised:2025-07-25
Online:2025-12-25
Published:2025-12-19
Contact:
Yibo Zhang
E-mail:yibo.zhang@bit.edu.cn
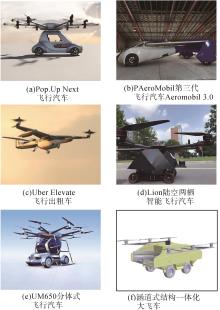
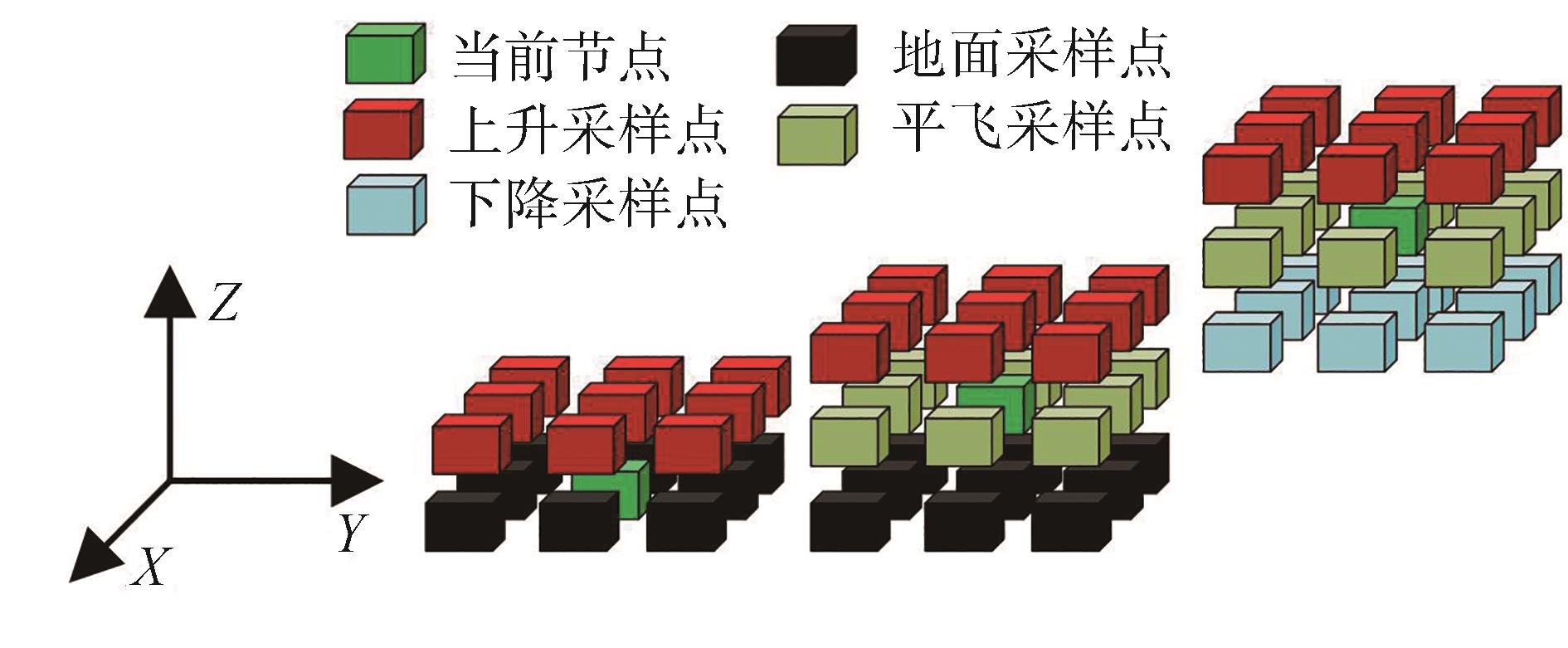
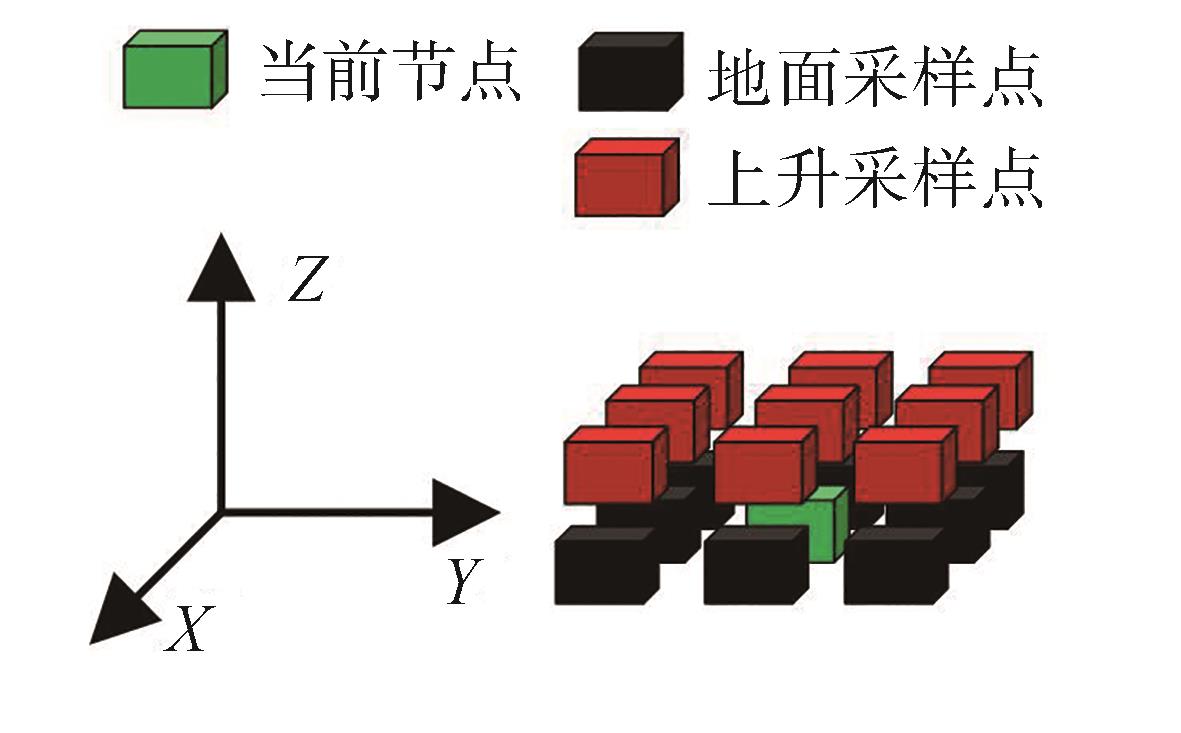
Longlong Liu,Wei Fan,Han Xiao,Yibo Zhang,Bin Xu. An Integrated Path Planner for Flying Cars with Sampling Nodes State Augmentation[J].Automotive Engineering, 2025, 47(12): 2303-2313.
"


"
"
"
"
"
"

"
"
"
| 方法 | 路径长度/m | 规划总时间/ms | 运动代价/ (W·h) | 提升效 果/% |
|---|---|---|---|---|
| 组合式 | 101.18 | 318.70 | 1 339.16 | 31.8 |
| 无状态增广 | 132.09 | 363.98 | 3 315.46 | |
| 状态增广 | 100.98 | 306.63 | 1 321.73 | 33.2 |
"
| 方法 | 路径长度/m | 规划总时间/ms | 运动代价/ (W·h) | 提升效 果/% |
|---|---|---|---|---|
| 组合式 | 169.88 | 553.31 | 2 218.29 | |
| 无状态增广 | 132.09 | 363.98 | 3 315.46 | 2.35 |
| 状态增广 | 120.93 | 389.32 | 2 948.10 | 8.53 |
"
"
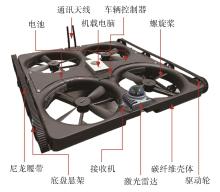
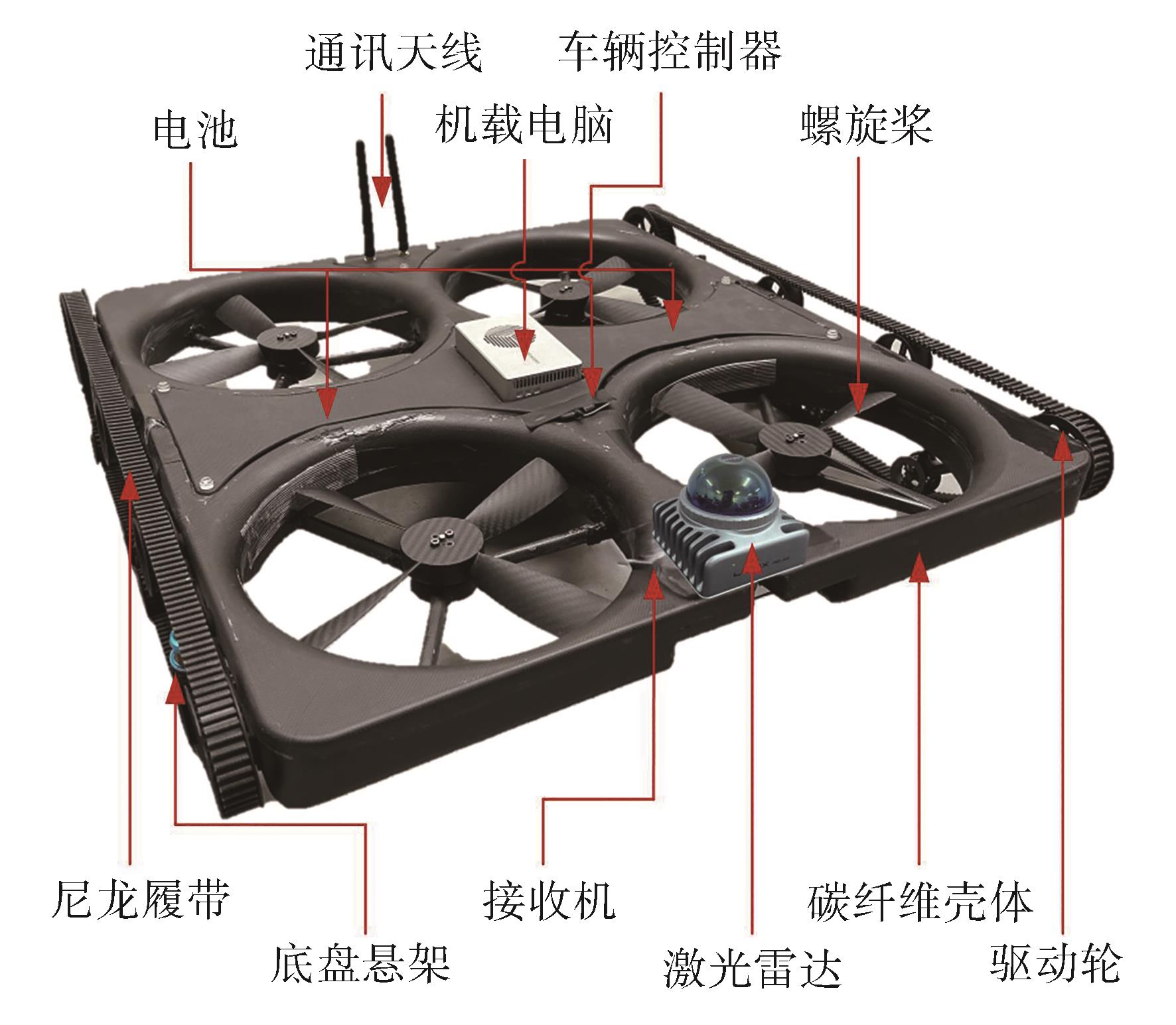
| 序号 | 参数 | 数值 |
|---|---|---|
| 1 | 质量 | 4.3 kg |
| 2 | 外形尺寸 | 600 mm×600 mm×220 mm |
| 3 | 外壳材料 | 碳纤维复合材质 |
| 4 | 螺旋桨半径 | 150 mm |
| 5 | 行驶轮距 | 550 mm |
| 6 | 飞行续航时间 | 28 min |
| 7 | 综合续航时间 | 60 min |
| 8 | 雷达型号 | MID360 |
| 9 | 机载计算机型号 | Orin_NX |
"

"
"
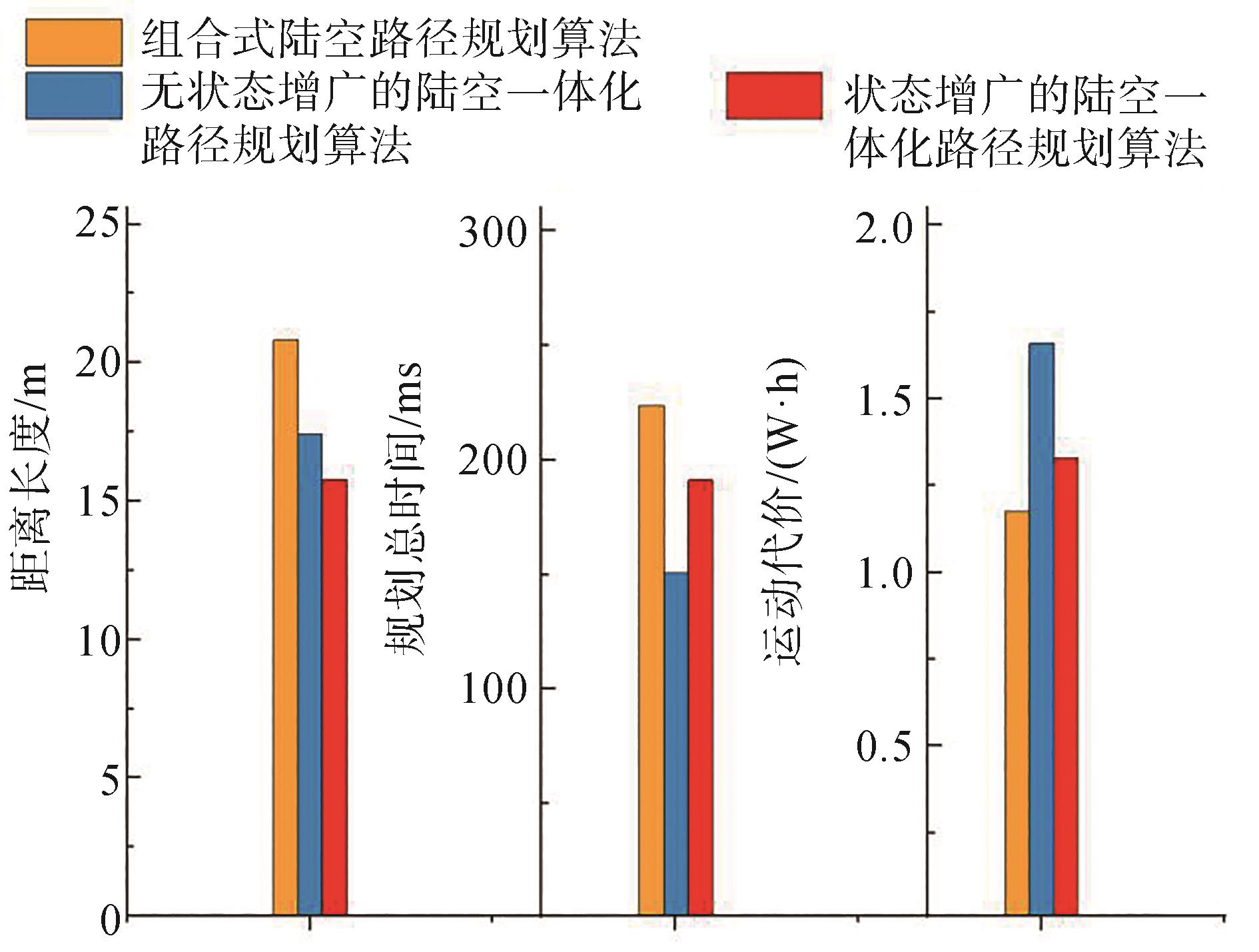
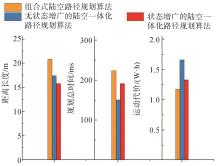
"
| 方法 | 路径 长度/m | 规划总时间/ms | 运动代价/(W·h) | 提升效果/% |
|---|---|---|---|---|
| 组合式 | 20.84 | 221.34 | 1.17 | |
| 无状态增广 | 17.47 | 149.76 | 1.66 | 2.14 |
| 状态增广 | 15.97 | 191.27 | 1.34 | 7.47 |
"
对比 方法 | 试验 类型 | 路径 长度 | 规划 总时间 | 运动 代价 | 提升 效果 |
|---|---|---|---|---|---|
| 组合式 | 仿真 | 28.81% | 29.58% | 32.9% | 30.43% |
| 样机 | 23.35% | 13.59% | 14.53% | 17.16% | |
| 无状态增广 | 仿真 | 8.45% | 6.96% | 11.07% | 8.83% |
| 样机 | 8.55% | 4.14% | 9.27% | 7.32% |
| [1] | 张扬军, 钱煜平, 诸葛伟林, 等. 飞行汽车的研究发展与关键技术[J]. 汽车安全与节能学报, 2020, 11(1): 1-16. |
| ZHANG Y J, QIAN Y P, ZHUGE W L, et al. Progress and key technologies of flying cars[J]. J Autom Safe Energ. 2020, 11(1): 1-16. | |
| [2] | DENG T, YAN J, XU B, et al. Multi-flying cars path planning strategy considering energy consumption and time in urban environments[J]. Automot. Innov., 2025, 8(1): 92-112. |
| [3] | 跨界: 奥迪空客联合造飞行汽车[J]. 汽车维修, 2018 (4): 51. |
| Cross-border: Audi and airbus jointly build flying cars[J]. Automobile Maintenance, 2018 (4): 51. | |
| [4] | 会飞的汽车 斯洛伐克AeroMobil 3.0详解 [EB/OL]. [2023-3-122]. https://auto.huanqiu.com/article/9CaKrnJIJtk. |
| Detailed explanation of the flying car Slovak AeroMobil 3.0 [EB/OL]. [2025-3-12]. https://auto.huanqiu.com/articLe/ | |
| 9CaKrnJIJtk. | |
| [5] | 刘博文, 郑泽兴, 方伟豪, 等. 飞行汽车的研究现状及发展方向[J]. 高科技与产业化, 2020 (1): 70-73. |
| LIU B W, ZHENG Z X, FANG W H, et al. The research status and development direction of flying cars[J]. High-Technology & Commercialization, 2020 (1): 70-73. | |
| [6] | ZHANG X Y, HUANG J G, HUANG Y H, et al. Intelligent amphibious ground-aerial vehicles: state of the art technology for future transportation[J]. IEEE Trans. Intell. Veh., 2023, 8(1): 970-987. |
| [7] | 郄天琪, 王伟达, 杨超, 等. 面向分体式飞行汽车自主对接的自动驾驶底盘运动规划方法研究[J]. 机械工程学报, 2024, 60(10): 235-244. |
| QIE T Q, WANG W D, YANG C, et al. Motion planning method of autonomous driving chassis for autonomous docking of the split-type flying vehicle[J]. Journal of Mechanical Engineering, 2024, 60(10): 235-244. | |
| [8] | 黄晶, 刘祥臻, 邓潇阳, 等. 基于多模态轨迹预测的智能车轨迹规划研究[J]. 汽车工程, 2024, 46(6): 965-974. |
| HUANG J, LIU X Z, DENG X Y, et al. Research on intelligent vehicle trajectory planning based on multimodal trajectory prediction[J]. Automotive Engineering, 2024, 46(6): 965-974. | |
| [9] | 丁志杰, 王亚飞, 章翼辰, 等. 基于复合动态采样的自动驾驶矿车节能路径规划方法[J]. 汽车工程, 2024, 46(4): 588-595. |
| DING Z J, WANG Y F, ZAHNG Y C, et al. Energy-saving planning method for autonomous driving mining trucks based on composite dynamic sampling[J]. Automotive Engineering, 2024, 46(4): 588-595. | |
| [10] | 张硕, 邝士奇, 赵轩, 等. 基于全局导向的智能车辆路径规划融合算法研究[J]. 汽车工程, 2024, 46(9): 1546-1555. |
| ZHANG S, KUANG S Q, ZHAO X, et al. Research on global oriented path planning fusion algorithm for intelligent vehicles[J]. Automotive Engineering, 2024, 46(9): 1546-1555. | |
| [11] | GE C, ZHANG J B, YAO H J, et al. Trajectory planning for autonomous vehicle with numerical optimization method[J]. Automot. Innov., 2024, 7(4): 627-643. |
| [12] | JR J J K, LAVALLE S M. RRT-connect: an efficient approach to single-query path planning[C]. Proceedings in the 2000 IEEE International Conference on Robotics and Automation, ICRA San Francisco, CA, IEEE, 2000. |
| [13] | WANG X Y, HUANG K Y, ZHANG X Y, et al. Path planning for air-ground robot considering modal switching point optimization[C]. Proceeding in International Conference on Unmanned Aircraft Systems (ICUAS), 2023: 87-94. |
| [14] | ERIC SIHITE, FILIP SLEZAK, IOANNIS MANDRALIS, et al. Demonstrating autonomous 3D path planning on a novel scalable UGV-UAV morphing robot[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023: 3064-3069. |
| [15] | ZHANG R B, LIN J X, WU W Z, et al. Model-based planning and control for terrestrial-aerial bimodal vehicles with passive wheels[C]. Proc. IEEE/RSJ Int. Conf. Intell. Robots. Syst., 2023: 1070-1077. |
| [16] | SHARIF A, LAHIRU H M, HERATH S, et al. Energy efficient path planning of hybrid fly-drive robot (HyFDR) using A* algorithm[C]. Proceedings in 15th International Conference on Informatics in Control, Automation and Robotics,2018. |
| [17] | 崔涵章, 林海英, 李泽宇, 等. 飞行汽车倾转机构设计与动力学分析[C]. 2022中国汽车工程学会年会论文, 2022: 200-204. |
| CUI H Z, LIN H Y, LI Z Y, et al. Design and dynamics analysis of flying car variant mechanism [C]. China Society of Automotive Engineers, SAECCE2022-OFS025, 2022: 200-204. | |
| [18] | JOHNSON W. Principles of helicopter aerodynamics[J]. 2nd ed. Cambridge University Press, New York, 2013. |
| [19] | 郭丛帅, 刘辉, 聂士达, 等. 考虑复杂地形和障碍尺度的无人车轨迹规划[J]. 汽车工程, 2025, 47(4): 645-657. |
| GUO C S, LIU H, NIE S D, et al. Trajectory planning for autonomous vehicles considering complex terrains and obstacle scales[J]. Automotive Engineering, 2025, 47(4): 645-657. | |
| [20] | USENKO V, VON STUMBERG L, PANGERCIC A, et al. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer[C]. Proceedings in Conf. Intell. Robots Syst., Proc. IEEE/RSJ, 2017: 215-222. |
| [21] | ZHOU B, GAO F, WANG L, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robot. Automat. Lett., 2019, 4(4): 3529-3536. |
| [22] | AI T F, XU B, XIANG C L, et al. Modeling and multimode analysis of electrically driven flying car[C]. 2020 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE, 2020:1565-1571. |
| [23] | XU T, FAN W, CHEN Z T, et al. Robust speed and spacing control framework for autonomous vehicles via µ-synthesis with descriptor form representation[J]. Automot. Innov., 2024, 7(4): 602-612. |
| [1] | Congshuai Guo,Hui Liu,Shida Nie,Yingjie Song,Yujia Xie,Fawang Zhang. Trajectory Planning for Autonomous Vehicles Considering Complex Terrains and Obstacle Scales [J]. Automotive Engineering, 2025, 47(4): 645-657. |
| [2] | Zhicheng He,Yongjie Zhu,Yu Qiu,Yue Liu,Enlin Zhou,Hao Zheng. Research on High-Reliability Path Planning for Three-Dimensional Terrain Considering Non-Terrain Fluid Characteristics [J]. Automotive Engineering, 2025, 47(4): 680-691. |
| [3] | Ziniu Hu,Xinpeng Chen,Zeyu Yang,Ziyun Yu,Hongmao Qin,Ming Gao. Path Planning with Multiple Obstacle-Avoidance Modes for Intelligent Vehicles [J]. Automotive Engineering, 2025, 47(3): 402-411. |
| [4] | Chenyuan He,Yilong Guo,Guanyu Zhu,Zhouyu Zhang,Yingfeng Cai,Hai Wang,Long Chen. A Review of Core Support Technologies for Flying Car System Operation [J]. Automotive Engineering, 2025, 47(12): 2277-2288. |
| [5] | Ying Zhao,Jibo Hao,Xiaoyu Sun,Jie Yang,Xiaosong Hu,Yueqiang Wang,Yangwei Wang. Thermal Performance Analysis of Liquid-Cooling Battery Pack for Flying Cars Based on Cellular Structure with Negative Poisson's Ratio [J]. Automotive Engineering, 2025, 47(12): 2326-2335. |
| [6] | Jing Zhao,Chao Yang,Weida Wang,Ying Li,Changle Xiang. An Efficient Learning Method for Multi-Modal Task Path Planning of Flying Vehicles [J]. Automotive Engineering, 2025, 47(11): 2070-2082. |
| [7] | Xueqin Lü,Xinrui Zhai,Shenchen Qian,Tao Wu,Peiyinquan Wang,Jiawei Gu. Regenerative Braking Control Strategy for Electric Unmanned Vehicles Based on Speed Prediction [J]. Automotive Engineering, 2025, 47(11): 2265-2275. |
| [8] | Ningning Tu,An Cao,Mu Yuan,Mingyang Hou,Shengping Liang. Research on Autonomous Emergency Steering of Vehicle Based on Offline Path Planning and iLQR Control [J]. Automotive Engineering, 2025, 47(10): 1933-1941. |
| [9] | Shuo Zhang,Shiqi Kuang,Xuan Zhao,Yisong Chen,Qiang Yu,Man Yu. Research on Global Oriented Path Planning Fusion Algorithm for Intelligent Vehicles [J]. Automotive Engineering, 2024, 46(9): 1546-1555. |
| [10] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [11] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [12] | Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network [J]. Automotive Engineering, 2024, 46(2): 241-252. |
| [13] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [14] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [15] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
|
||