Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (9): 1372-1385.doi: 10.19562/j.chinasae.qcgc.2022.09.008
Special Issue: 底盘&动力学&整车性能专题2022年
Previous Articles Next Articles
Cheng Lin1,2,Sheng Liang1,2,Xinle Gong3( ),Xiao Yu1,2,Bowen Wang1,2
),Xiao Yu1,2,Bowen Wang1,2
Received:2022-03-23
Revised:2022-04-17
Online:2022-09-25
Published:2022-09-21
Contact:
Xinle Gong
E-mail:xinlegong@gmail.com
Cheng Lin,Sheng Liang,Xinle Gong,Xiao Yu,Bowen Wang. Integrated Dynamic Control Strategy for Extreme Maneuvers of 4WIDEVs[J].Automotive Engineering, 2022, 44(9): 1372-1385.
"
"
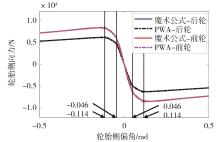
| 轮胎 | 平均拟合误差 |
|---|---|
| 前轮 | 1.10% |
| 后轮 | 1.15% |
"

"

"
"

"

"
"
| 路面附着条件 | c1 | c2 | c3 |
|---|---|---|---|
| 干沥青路面 | 1.28 | 23.99 | 0.52 |
| 湿沥青路面 | 0.35 | 33.83 | 0.35 |
| 积雪路面 | 0.195 | 94.13 | 0.06 |
| 结冰路面 | 0.05 | 306.39 | 0 |

"
"
| 参数 | 数值 | 单位 | 参数 | 数值 | 单位 |
|---|---|---|---|---|---|
| m | 1 523 | kg | L | 2.548 | m |
| Iz | 2 023 | kg·m2 | dw | 1.539 | m |
| lf | 1.163 | m | Jω | 0.9 | kg·m2 |
| lr | 1.385 | m | rr | 0.354 | m |
"

"
"
"
"

"
"
"

| 1 | 余卓平, 冯源, 熊璐. 分布式驱动电动汽车动力学控制发展现状综述[J]. 机械工程学报, 2013, 49(8): 106-114. |
| YU Zhuoping, FENG Yuan, XIONG Lu. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(8): 106-114. | |
| 2 | ZHANG Duo, LIU Guohai, ZHOU Huawei, et al. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles [J]. IEEE Transactions on Industrial Electronics, 2018, 65(11): 9090-9100. |
| 3 | HASAN Alipour, MOHAMMAD Bagher Bannae Sharifian, MEHRAN Sabahi. A modified integral sliding mode control to lateral stabilisation of 4-wheel independent drive electric vehicles [J]. Vehicle System Dynamics, 2014, 52(12): 1584-1606. |
| 4 | 林程, 徐志峰, 王文伟, 等. 基于直接滑动率分配的横摆稳定性控制策略研究[J].机械工程学报, 2015, 51(16): 42-49. |
| LIN Cheng, XU Zhifeng, WANG Wenwei, et al. Research on yaw stability control based on direct slip ratio distribution [J]. Journal of Mechanical Engineering, 2015, 51(16): 42-49. | |
| 5 | MEHDI Abroshan, REZA Hajiloo, EHSAN Hashemi, et al. Model predictive-based tractor-trailer stabilisation using differential braking with experimental verification [J]. Vehicle System Dynamics, 2021 59(8): 1190-1213. |
| 6 | CONG Geng, LOTFI Mostefai, MOULOUD Denaï, et al. Direct yaw-moment control of an in-wheel-motored electric vehicle based on body slip angle fuzzy observer [J]. IEEE Transactions on Industrial Electronics, 2009, 56(5): 1411-1419. |
| 7 | 杜荣华, 米思雨, 胡林, 等. 分布式驱动电动汽车复合制动系统转矩分配控制策略仿真[J].汽车工程, 2019, 41(3): 328-345. |
| DU Ronghua, MI Siyu, HU Lin, et al. Simulation on control strategy for torque distribution of compound brake system in a distributed drive electric vehicle [J]. Automotive Engineering, 2019, 41(3): 328-345. | |
| 8 | 刘志强, 刘广. 分布式驱动电动汽车稳定性控制仿真与试验[J]. 汽车工程, 2019, 41(7): 793-799. |
| LIU Zhiqiang, LIU Guang. Simulation and test of stability control for distributed drive electric vehicles[J]. Automotive Engineering, 2019, 41(7): 793-799. | |
| 9 | ZHAI Li, SUN Tianmin, WANG Jie. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4726-4739. |
| 10 | ANIL Kunnappillil Madhusudhanan, MATTEO Corno, EDWARD Holweg. Sliding mode-based lateral vehicle dynamics control using tyre force measurements [J]. Vehicle System Dynamics, 2015, 53(11): 1599-1619. |
| 11 | LI Shengbo Eben, CHEN Hailiang, LI Renjie, et al. Predictive lateral control to stabilise highly automated vehicles at tire-road friction limits [J]. Vehicle System Dynamics, 2020, 58(5): 768-786. |
| 12 | 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1110-1116. |
| CHEN Te, CHEN Long, XU Xing, et al. Integrated control of unmanned distributed drive vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1110-1116. | |
| 13 | TADEAS Sedlacek, DIRK Odenthal, DIRK Wollherr. Minimum-time optimal control for vehicles with active rear-axle steering, transfer case and variable parameters [J]. Vehicle System Dynamics, 2021, 59(8): 1227-1255. |
| 14 | LIANG Yixiao, LI Yinong, YU Yinghong, et al. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering [J]. Vehicle System Dynamics, 2020, 58(11): 1711-1735. |
| 15 | TESHENG Hsiao. Robust wheel torque control for traction/braking force tracking under combined longitudinal and lateral motion [J]. IEEE Transactions on Vehicular Technology, 2015, 16(3): 1335-1347. |
| 16 | WANG Zhenfeng, HAMID Taghavifar, NA Jing, et al. MME-EKF-based path-tracking control of autonomous vehicles considering input saturation [J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5246-5259. |
| 17 | TIAN Yantao, HUANG Kai, CAO Xuanhao,et al. A hierarchical adaptive control framework of path tracking and roll stability for intelligent heavy vehicle with MPC [J]. Proceedings of The Imech, Part D: Journal of Automobile Engineering, 2020, 50(4): 1209-1216. |
| 18 | HUANG Xiaoyu, ZHANG Hui, ZHANG Guoguang, et al. Robust weighted gain-scheduling h∞ vehicle lateral motion control with considerations of steering system backlash-type hysteresis [J]. IEEE Transactions on Control Systems Technology, 2014, 22(5): 1740-1753. |
| 19 | DU Haiping, ZHANG Nong, DONG Guangming. Stabilizing vehicle lateral dynamics with considerations of parameter uncertainties and control saturation through robust yaw control [J]. IEEE Transactions on Vehicular Technology, 2010, 59(5): 2593-2597. |
| 20 | STEFANO Di Cairano, HONGTEI Eric Tseng, DANIELE Bernardini, et al. Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain [J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1236-1248. |
| 21 | ALBERTO Bemporad, MANFRED Morari. Control of systems integrating logic, dynamics, and constraints [J]. Automatica, 1999, 35: 407-427. |
| 22 | FABIO Danilo Torrisi, ALBERTO Bemporad. HYSDEL—a tool for generating computational hybrid models for analysis and synthesis problems [J]. IEEE Transactions on Control Systems Technology, 2004, 12(2): 235-249. |
| 23 | BURCKHARDT M. Fahrwerktechnik, radschlupf-regelsysteme[M]. Vogel, 1993. |
| [1] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [2] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [5] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [6] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [7] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [8] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [9] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [10] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [11] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [12] | Yong Lu,Yichao He,He Tian,Kun Jiang,Diange Yang. Research on Longitudinal Acceleration Planning Method of Adaptive Cruise Control System for Mass Production [J]. Automotive Engineering, 2023, 45(10): 1803-1814. |
| [13] | Shaobo Xie,Pengcheng Qu,Jiacheng Li,Huiqing Wang,Kun Lang. Study on Coordinated Control of Speed Planning and Energy Management for Connected Hybrid Electric Truck in Vehicle Following Scene [J]. Automotive Engineering, 2022, 44(8): 1136-1143. |
| [14] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
| [15] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
|