Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (12): 2251-2259.doi: 10.19562/j.chinasae.qcgc.2023.12.007
Special Issue: 新能源汽车技术-电驱动&能量管理2023年
Previous Articles Next Articles
Qin Li1,Jianming Tang1,Boyuan Zhang1,Yong Chen1,Yong Wang2( )
)
Received:2023-06-02
Revised:2023-06-30
Online:2023-12-25
Published:2023-12-21
Contact:
Yong Wang
E-mail:17862709675@163.com
Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles[J].Automotive Engineering, 2023, 45(12): 2251-2259.
"


"
"
"
| 参数 | 数值 |
|---|---|
| 车辆整备质量/kg | 1 412 |
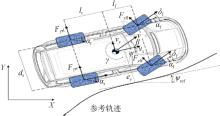
| 质心距前轴长/m | 1.015 |
| 质心距后轴长/m | 1.895 |
| 前轮侧偏刚度/(N·rad-1) | 52 000 |
| 后轮侧偏刚度/(N·rad-1) | 34 500 |
| 轴长/m | 1.675 |
| 轮胎半径/m | 0.308 |
| 绕Z轴转动惯量/(kg·m2) | 1 536.7 |
| 轮毂电机转矩输出边界值/(N·m) | 800 |

"


"

"

"


"

| 1 | MAO Y, ZUO S, CAO J. Effects of rotor position error on longitudinal vibration of electric wheel system in in-wheel PMSM driven vehicle[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1314-1325. |
| 2 | 罗禹贡,陈锐,胡云.分布式电驱动车辆线控转向系统MFAC主动容错控制[J].机械工程学报,2019,55(22):131-139. |
| LUO Y G, CHEN R, HU Y. Active fault-tolerant control based on MFAC or 4WID EV with steering by wire system[J]. J. Mech. Eng., 2019, 55(22): 131-139. | |
| 3 | DALBONI M, TAVERNINI D, MONTANARO U, et al. Nonlinear model predictive control for integrated energy-efficient torque-vectoring and anti-roll moment distribution[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1212-1224. |
| 4 | KARKI A, PHUYAL S, TULADHAR D, et al. Status of pure electric vehicle power train technology and future prospects[J]. Applied System Innovation, 2020, 3(3): 35. |
| 5 | 邹渊,郭宁远,张旭东,等.分布式电驱动车辆力矩分配控制研究现状综述[J].中国公路学报,2021,34(9):1-25. |
| ZOU Y, GUO N, ZHANG X, et al. Review of torque allocation control for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2021, 34(9): 1-25. | |
| 6 | 赵轩,王姝,马建,等.分布式驱动电动汽车底盘集成控制技术综述[J].中国公路学报,2023,36(4):221-248. |
| ZHAO X, WANG Z, MA J, et al. Review of chassis integrated control technology for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2023, 36(4): 221-248. | |
| 7 | CHEN T, CHEN L, XU X, et al. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault[J]. Mechanical Systems and Signal Processing, 2019, 123: 298-315. |
| 8 | 张雷,王子浩,孙逢春,等.四轮轮毂电机驱动智能电动汽车转向失效容错控制研究[J].机械工程学报,2021,57(20):141-152. |
| ZHANG L, WANG Z, SUN F, et al. Fault-tolerant control for intelligent four-wheel-independently-actuated electric vehicles under complete steer-by-wire system failur[J]. J. Mech. Eng., 2021,57(20):141-152. | |
| 9 | ZHANG X, COCQUEMPOT V. Fault tolerant control for an electric 4WD vehicle's path tracking with active fault diagnosis[J]. IFAC Proceedings Volumes, 2014, 47(3): 6728-6734. |
| 10 | ZHANG D, LIU G, ZHOU H, et al. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2018, 65(11): 9090-9100. |
| 11 | 张雷,余文,王震坡,等.基于多方法切换的四轮轮毂电机驱动电动汽车容错控制策略[J].机械工程学报,2020,56(16):227-239. |
| ZHANG L, YU W, WANG Z P, et al. Fault tolerant control based on multi-methods switching for four-wheel-independently-actuated electric vehicles[J]. J Mech Eng., 2020, 56(16): 227-239. | |
| 12 | TANG H, CHEN Y, ZHOU A. Actuator fault-tolerant control for four-wheel-drive-by-wire electric vehicle[J]. IEEE Transactions on Transportation Electrification, 2021, 8(2): 2361-2373. |
| 13 | CHEN Y, STOUT C, JOSHI A, et al. Driver-assistance lateral motion control for in-wheel-motor-driven electric ground vehicles subject to small torque variation[J]. IEEE Transactions on Vehicular Technology, 2018, 67(8): 6838-6850. |
| 14 | ZOU Y, GUO N, ZHANG X. An integrated control strategy of path following and lateral motion stabilization for autonomous distributed drive electric vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(4): 1164-1179. |
| 15 | ZHANG D, LIU G, ZHOU H, et al. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2018, 65(11): 9090-9100. |
| 16 | MIN H, FANG Y, WU X, et al. A fault diagnosis framework for autonomous vehicles with sensor self-diagnosis[J]. Expert Systems with Applications, 2023, 224: 120002. |
| 17 | FANG Y, MIN H, WU X, et al. Toward interpretability in fault diagnosis for autonomous vehicles: interpretation of sensor data anomalies[J]. IEEE Sensors Journal, 2023. |
| 18 | SHI Q, ZHANG H. Fault diagnosis of an autonomous vehicle with an improved SVM algorithm subject to unbalanced datasets[J]. IEEE Transactions on Industrial Electronics, 2020, 68(7): 6248-6256. |
| [1] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [2] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [3] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [4] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
| [5] | Peijun Fang,Yingfeng Cai,Long Chen,Yubo Lian,Hai Wang,Yilin Zhong,Xiaoqiang Sun. Trajectory Tracking Control Method Based on Vehicle Dynamics Hybrid Model for Intelligent Vehicle [J]. Automotive Engineering, 2022, 44(10): 1469-1483. |
| [6] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [7] | Hongwei Wang,Chenyu Liu,Lei Li,Haotian Zhang. Research on Trajectory Tracking Control of Unmanned Vehicle Based on Efficient NMPC Algorithm [J]. Automotive Engineering, 2022, 44(10): 1494-1502. |
| [8] | Guochen Niu,Wenshuai Li,Hongxu Wei. Intelligent Vehicle Lane Changing Trajectory Planning Based on Double Quintic Polynomials [J]. Automotive Engineering, 2021, 43(7): 978-986. |
| [9] | Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking [J]. Automotive Engineering, 2021, 43(7): 995-1004. |
| [10] | Long Chen,Kai Zou,Yingfeng Cai,Chenglong Teng,Xiaoqiang Sun,Hai Wang. Longitudinal and Lateral Comprehensive Trajectory Tracking Control of Intelligent Vehicles Based on NMPC [J]. Automotive Engineering, 2021, 43(2): 153-161. |
| [11] | Chen Long, Xie Yunpeng, Cai Yingfeng, Sun Xiaoqiang, Teng Chenglong, Zou Kai. Stable Tracking Control of Autonomous Vehicles at Extreme Conditions [J]. Automotive Engineering, 2020, 42(8): 1016-1026. |
| [12] | Zhang Lei, Zhao Xianhua, Wang Zhenpo. Study on Coordinated Control of Trajectory Tracking and Yaw Stability for Autonomous Four-wheel-independent-driving Electric Vehicles [J]. Automotive Engineering, 2020, 42(11): 1513-1521. |
| [13] | Zhao Zhiguo, Fu Shihao, Jiang Siwen, Chen Jiayi. Fault Diagnosis of Position Sensor for Synchronizer Actuator Motor in Dry Dual Clutch Transmission [J]. Automotive Engineering, 2020, 42(11): 1585-1594. |
| [14] | Hu Yun, Jiang Fachao, Chen Rui & Luo Yugong. Active Fault-Tolerant Control Based on MFAC for 4WID EV Driving System [J]. Automotive Engineering, 2019, 41(9): 983-989. |
| [15] | Pan Shiju, Li Hua, Su Zhiyuan & Xu Youchun. Trajectory Tracking Method for Intelligent Vehicles Based on Tracking-error Model [J]. Automotive Engineering, 2019, 41(9): 1021-1027. |
|