Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1755-1765.doi: 10.19562/j.chinasae.qcgc.2024.10.004
Previous Articles Next Articles
Tong Wu1,Jing Rong1,Junnian Wang2( ),Wen Sun3,Liang Chu2,Linhe Ge1
),Wen Sun3,Liang Chu2,Linhe Ge1
Received:2024-07-23
Revised:2024-08-26
Online:2024-10-25
Published:2024-10-21
Contact:
Junnian Wang
E-mail:wjn@jlu.edu.cn
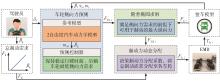
Tong Wu,Jing Rong,Junnian Wang,Wen Sun,Liang Chu,Linhe Ge. Dynamic Braking Allocation Strategy for Turning-Braking Maneuver[J].Automotive Engineering, 2024, 46(10): 1755-1765.
"

"
"
"
| 符号 | 数值 | 单位 | 符号 | 数值 | 单位 |
|---|---|---|---|---|---|
| M | 10 080 | kg | B1 | 2.030 | m |
| mv | 7 690 | kg | B2 | 1.863 | m |
| hg | 1.300 | m | rr | 0.510 | m |
| L | 4.490 | m | rb | 0.173 | m |
| a | 3.102 | m | μb | 0.4 | |
| Iz | 30 872.4 | Jw | 14 |
"

"

"

"
"

"

"
"

"

"
| 1 | WANG C, ZHAO W, LI W. Braking sense consistency strategy of electro-hydraulic composite braking system[J]. Mechanical Systems and Signal Processing, 2018, 109: 196-219. |
| 2 | 彭晓燕, 吕以滨, 何磊. 基于滑移率的线控制动系统制动力分配策略研究[J].中国机械工程, 2016, 27(17): 2407-2412. |
| PENG X Y, LV Y B, HE L. Research on brake-force distribution strategies for brake-by-wire system based on slip ratio[J]. China Mechanical Engineering, 2016, 27(17): 2407-2412. | |
| 3 | ZHANG Z, LI B, HUANG C, et al. Collaborative control of lateral stability and braking performance of vehicles during braking-in-turn maneuver[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(5): 1364-1378. |
| 4 | JOA E, YI K, SOHN K, et al. Four-wheel independent brake control to limit tire slip under unknown road conditions[J]. Control Engineering Practice, 2018, 76: 79-95. |
| 5 | LU H, SHI Y, HE D, et al. Model-based vehicle stability control with tyre force and instantaneous cornering stiffness estimation[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2016, 230(6): 754-770. |
| 6 | 陈佳瑶, 彭晓燕. 线控制动车辆弯道制动力优化分配控制策略[J]. 机械设计, 2020, 37(2): 1-9. |
| CHEN J Y, PENG X Y. Strategy for optimal braking-force allocation of vehicles with the brake-by-wire system during a braking-in-turn maneuver[J]. Journal of Machine Design, 2020, 37(2): 1-9. | |
| 7 | PARK H, GERDES J C. Analysis of feasible tire force regions for optimal tire force allocation with limited actuation[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(3): 75-87. |
| 8 | TANG M, ZHANG X, LIU J. Vehicle braking control with variable ratio braking forces optimization distribution during cornering braking process[J]. IEEE Transactions on Intelligent Vehicles, 2024. Doi: 10.1109/TIV.2024.3388015. |
| 9 | ZHANG L, YU L, WANG Z, et al. All-wheel braking force allocation during a braking-in-turn maneuver for vehicles with the brake-by-wire system considering braking efficiency and stability[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4752-4767. |
| 10 | 胡东海, 何仁. 基于安全特性电子液压制动前后轴制动力分配改进方法[J]. 汽车工程, 2016, 38(5): 587-594,599. |
| HU D H, HE R. A modified method for braking force distribution between front and rear axles of electro-hydraulic brake based on safety features[J]. Automotive Engineering, 2016, 38(5): 587-594,599. | |
| 11 | 杜荣华, 米思雨, 胡林, 等. 分布式驱动电动汽车复合制动系统转矩分配控制策略仿真[J].汽车工程, 2019, 41(3): 327-333,345. |
| DU R H, MI S Y, HU L, et al. Simulation on control strategy for torque distribution of compound brake system in a distributed drive electric vehicle[J]. Automotive Engineering, 2019, 41(3): 327-333,345. | |
| 12 | GENG G Q, CHENG P, SUN L Q, et al. A study on lateral stability control of distributed drive electric vehicle based on fuzzy adaptive sliding mode control[J]. International Journal of Automotive Technology, 2024. |
| 13 | CHENG S, PENG H N, YANG C, et al. Chassis global dynamics optimization for automated vehicles: a multiactuator integrated control method[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(1): 578-587. |
| 14 | 陈志成, 吴坚, 赵健, 等. 混合线控制动系统制动力精确调节控制策略[J]. 汽车工程, 2018, 40(4): 457-464. |
| CHEN Z C, WU J, ZHAO J, et al. Control strategy for accurate adjustment of braking force in hybrid brake by wire system [J]. Automotive Engineering, 2018, 40(4): 457-464. | |
| 15 | SCHOLTZ S J, HAMERSMA H A. Investigating off-road vehicle lateral stability with integrated chassis control[J]. Vehicle System Dynamics, 2024: 1-22. |
| 16 | 席裕庚, 王凡. 非线性系统预测控制的多模型方法 [J]. 自动化学报, 1996(4): 456-461. |
| XI Y G, WANG F. A multi-model approach for predictive control of nonlinear systems[J]. Acta Automatica Sinica, 1996(4): 456-461. | |
| 17 | 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制 [M]. 2版. 北京: 北京理工大学出版社, 2020. |
| GONG J W, LIU K, QI J Y. Autonomous vehicle model predictive control[M]. 2nd ed. Beijing: Beijing Institute of Technology Press, 2020. | |
| 18 | JEONG D, CHOI S B. Tube-based robust model predictive control for tracking control of autonomous articulated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 2184-2196. |
| 19 | 安部正人. 车辆操纵动力学理论与应用 [M]. 2 版. 北京: 机械工业出版社, 2016. |
| ABE Masato. Vehicle handling dynamics theory and application[M]. 2nd ed. Beijing: China Machine Press, 2016. | |
| 20 | 吴桐. 商用车电控机械制动器结构与制动力控制策略研究[D]. 长春:吉林大学,2022. |
| WU T. Research on structure and braking force control strategies of electro-mechanical brake for commercial vehicles[D]. Changchun: Jilin University, 2022. |
| [1] | Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons [J]. Automotive Engineering, 2024, 46(9): 1587-1599. |
| [2] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [3] | Guizhen Feng,Dongpeng Zhao,Shaohua Li. Research on Air Spring Modeling Based on Fractional Order and Electric Vehicle Active Suspension Control [J]. Automotive Engineering, 2024, 46(7): 1282-1293. |
| [4] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [5] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [6] | Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou. Chassis Coordinated Control for Lateral Stability of Four-in-Wheel-Motor-Drive Vehicles [J]. Automotive Engineering, 2024, 46(10): 1733-1743. |
| [7] | Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift [J]. Automotive Engineering, 2024, 46(10): 1780-1789. |
| [8] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [9] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [10] | Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability [J]. Automotive Engineering, 2024, 46(10): 1829-1841. |
| [11] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [12] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [13] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [14] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [15] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |