Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (3): 481-488.doi: 10.19562/j.chinasae.qcgc.2025.03.010
Kefan Zhao1,2,Xiaofei Pei1,2( ),Zhenfu Chen1,2,Hongbo Xiang1,2
),Zhenfu Chen1,2,Hongbo Xiang1,2
Received:2024-05-20
Revised:2024-09-16
Online:2025-03-25
Published:2025-03-21
Contact:
Xiaofei Pei
E-mail:peixiaofei7@whut.edu.cn
Kefan Zhao,Xiaofei Pei,Zhenfu Chen,Hongbo Xiang. Vehicle Yaw Stability Control Based on Multi-agent Model Prediction Control[J].Automotive Engineering, 2025, 47(3): 481-488.
"

"

"
"
"
| 车辆参数 | 数值 |
|---|---|
| 整车质量/kg | 1 650 |
| 质心到前轴距离/m | 1.4 |
| 质心到后轴距离/m | 1.65 |
| 绕Z轴转动惯量/(kg | 3 234 |
| 左右轮距/m | 1.48 |
| 车轮半径/m | 0.353 |
| 前轮轮胎侧偏刚度/(N | 43 160 |
| 后轮轮胎侧偏刚度/(N | 29 210 |
"
"
"
"
"
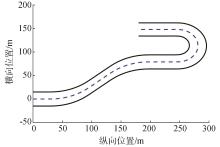
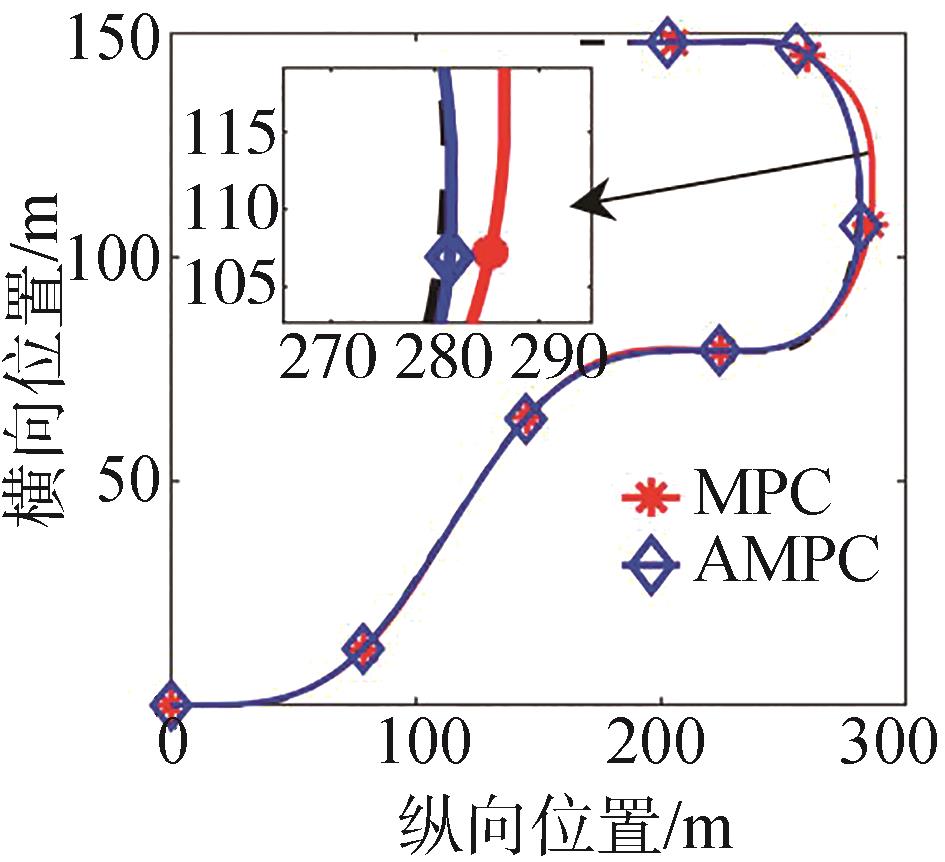
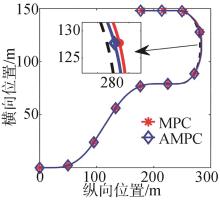
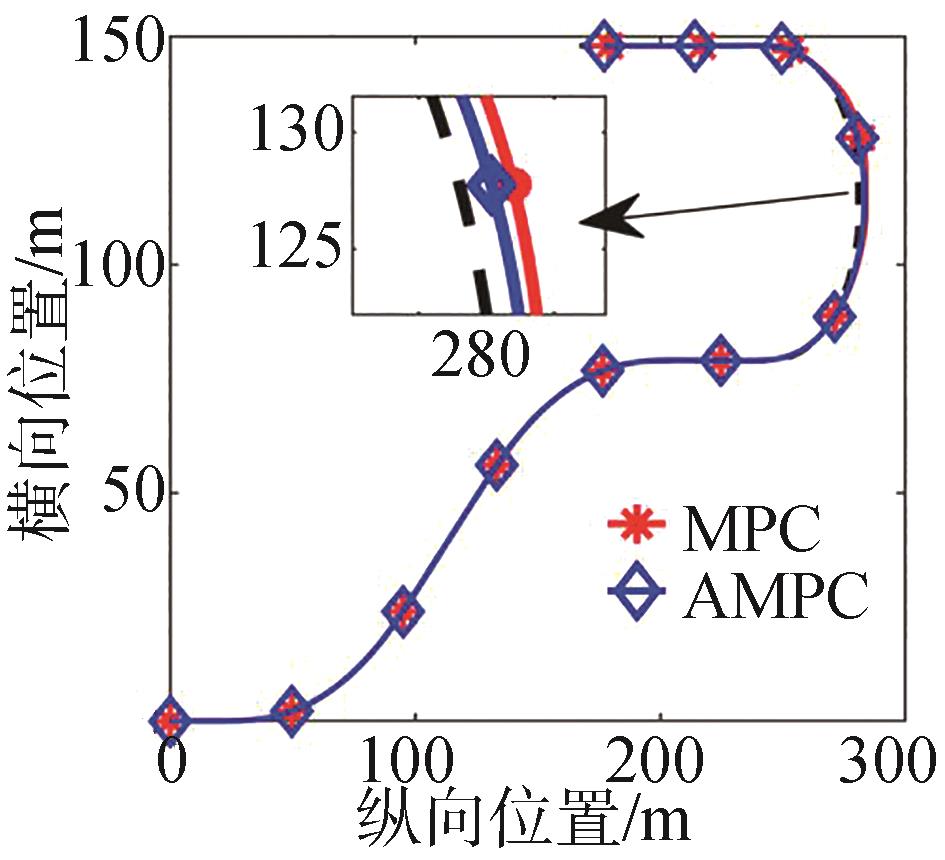
| S-turn | U-turn | ||
|---|---|---|---|
| AMPC | 0.34 m | AMPC | 0.82 m |
| MPC | 0.38 m | MPC | 2.77 m |
"
"

"
"

"
"
"

"
"
"
"
| S-turn | U-turn | ||
|---|---|---|---|
| AMPC | 0.2 1m | AMPC | 0.64 m |
| MPC | 0.21 m | MPC | 1.25 m |
"
"
"
"
"
"
| 1 | DALBONI M, et al. Nonlinear model predictive control for integrated energy efficient torque-vectoring and anti-roll moment distribution[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1212-1224. |
| 2 | ZHU X, ZHANG H, WANG J, et al. Robust lateral motion control of electric ground vehicles with random network-induced delays[J]. IEEE Transactions on Vehicular Technology, 2015, 64(11): 4985-4995. |
| 3 | MOUSAVINEJAD E, HAN Q L, YANG F, et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics, 2017, 55:268-294. |
| 4 | JING H, WANG R, WANG J, et al. Robust H∞ dynamic output-feedback control for four-wheel independently actuated electric ground vehicles through integrated AFS/DYC[J]. Journal of the Franklin Institute, 2018, 355(18): 9321-9350. |
| 5 | CHENG S, LI L, LIU C Z, et al. Robust LMI-based H-infinite controller integrating AFS and DYC of autonomous vehicles with parametric uncertainties [J]. EEE Transactions on Systems, Man, and Cybernetics: Systems, 2020,51(11) :6901-6910. |
| 6 | 梁晋豪.分布式驱动电动汽车侧向稳定控制关键技术与转矩优化策略研究[D].南京:东南大学,2022. |
| LIANG J H. Research on key technology and torque optimization strategy for lateral stability control of distributed-drive electric vehicles[D]. Nanjing: Southeast University,2022. | |
| 7 | AHMADIAN N, KHOSRAVI A, SARHADI P. Driver assistant yaw stability control via integration of AFS and DYC[J]. Vehicle System Dynamics, 2022, 60(5): 1742-1762. |
| 8 | MASHADI B, MAJIDI M. Integrated AFS/DYC sliding mode controller for a hybrid electric vehicle[J]. International Journal of Vehicl Desiqn, 2011,56(4):246-269. |
| 9 | KHELLADI F, ORJUELA R, BASSET M. Coordinated AFS and DYC for autonomous vehicle steerability and stability enhancement[J]. IFAC-Papers Online, 2020, 53(2): 14248-14253. |
| 10 | SHUAI Z, ZHANG H, WANG J, et al. Combined AFS and DYC control of four-wheel-independent-drive electric vehicles over CAN network with time-varying delays[J]. IEEE Transactions on Vehicular Technology, 2014, 63(2): 591-602. |
| 11 | BEAL C E, GERDES J C. Model predictive control for vehicle stabilization at the limits of handling[J]. IEEE Transactions on Vehicular Technology, 2013, 21(4): 1258-1269. |
| 12 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems [J]. IEEE Transactions on Control Systems Technology, 2007,15(3):566-580. |
| 13 | WANG J, LONGORIA R G. Coordinated and reconfigurable vehicle dynamics control [J]. IEEE Transactions on Control Systems Technology, 2009, 17(3): 723-732. |
| 14 | ZHAO H, CHEN W, ZHAO J, et al. Modular integrated longitudinal, lateral, and vertical vehicle stability control for distributed electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1327-1338. |
| 15 | ATAEI M, SOO. Jeon, et al. Development of a novel general reconfigurable vehicle dynamics model[J]. Mechanism and Machine Theory, 2021,156, No. 104147. |
| 16 | TANG C, ATAEI M, KHAJEPOUR A. A reconfigurable integrated control for narrow tilting vehicles [J]. IEEE Transactions on Vehicular Technology, 2019,68(1): 234-244. |
| 17 | NEGENBORN R R, MAESTRE J M. Distributed model predictive control: an overview and roadmap of future research opportunities[J]. IEEE Control Systems Magazine, 2014, 34(4): 87-97. |
| 18 | TANG C, KHAJEPOUR A. Agent-based model predictive controller (AMPC) for flexible and efficient vehicular control[J]. IEEE Transactions on Vehicular Technology,2021,70(10):9877-9885. |
| 19 | 赵轩,王姝,马建,等.分布式驱动电动汽车底盘集成控制技术综述[J].中国公路学报,2023,36(4):221-248. |
| ZHAO X, WANG S, MA J, et al. A review of integrated control technologies for distributed drive electric vehicle chassis[J]. Chinese Journal of Highway, 2023,36(4):221-248. | |
| 20 | 张放.极限工况下自动驾驶车辆的轨迹规划与运动控制[D].北京: 清华大学,2018. |
| ZHANG F. Trajectory planning and motion control of self-driving vehicles under extreme conditions[D]. Beijing: Tsinghua University, 2018. |
| [1] | Ruixin Yang,Yingfeng Cai,Yubo Lian,Long Chen,Xiaoqiang Sun. Distributed MPC Multi-objective Optimization Control for Commercial Vehicle Platoon Under Time Delay Conditions [J]. Automotive Engineering, 2025, 47(3): 418-429. |
| [2] | Zhengcai Yang,Huiquan Zhang,Linhe Ge,Tianjun Sun. Trajectory Tracking Control Method for Autonomous Vehicles Considering Time-Varying Reference and Steering Delay [J]. Automotive Engineering, 2025, 47(1): 44-54. |
| [3] | Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons [J]. Automotive Engineering, 2024, 46(9): 1587-1599. |
| [4] | Dongxu Su,Zhiguo Zhao,Kun Zhao,Gang Li,Qin Yu. Tube-MPC Vehicle Stability Control Based on Stability Domain Division in Extension Phase Plane [J]. Automotive Engineering, 2024, 46(9): 1654-1667. |
| [5] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [6] | Guizhen Feng,Dongpeng Zhao,Shaohua Li. Research on Air Spring Modeling Based on Fractional Order and Electric Vehicle Active Suspension Control [J]. Automotive Engineering, 2024, 46(7): 1282-1293. |
| [7] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [8] | Bing Zhou,Kangqiang Zheng,Ru Wang,Xiaojian Wu,Tian Chai. Adaptive Collision Avoidance Control Considering Available Road Width [J]. Automotive Engineering, 2024, 46(5): 893-905. |
| [9] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [10] | Jian Wu,Hanlin Wang,Bing Zhu,Jian Zhao,Zhicheng Chen. Adaptive Control Strategy for Vehicle Yaw Stability Considering Dynamic Multi-objective Requirements [J]. Automotive Engineering, 2024, 46(12): 2329-2338. |
| [11] | Xiaohu Geng,Yao Fu,Jie Wang,Yulong Lei,Weidong Liu,Yuhai Wang,Ke Liu. Predictive Cruise Control for Commercial Vehicles Considering Different Time Domains [J]. Automotive Engineering, 2024, 46(11): 2046-2058. |
| [12] | Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou. Chassis Coordinated Control for Lateral Stability of Four-in-Wheel-Motor-Drive Vehicles [J]. Automotive Engineering, 2024, 46(10): 1733-1743. |
| [13] | Tong Wu,Jing Rong,Junnian Wang,Wen Sun,Liang Chu,Linhe Ge. Dynamic Braking Allocation Strategy for Turning-Braking Maneuver [J]. Automotive Engineering, 2024, 46(10): 1755-1765. |
| [14] | Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift [J]. Automotive Engineering, 2024, 46(10): 1780-1789. |
| [15] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
|
||