Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (6): 1155-1168.doi: 10.19562/j.chinasae.qcgc.2025.06.014
Qinglu Ma1( ),Qiuwei Jian2,Meiqiang Li1,Zheng Zou3
),Qiuwei Jian2,Meiqiang Li1,Zheng Zou3
Received:2024-08-07
Revised:2024-12-14
Online:2025-06-25
Published:2025-06-20
Contact:
Qinglu Ma
E-mail:qlm@cqjtu.edu.cn
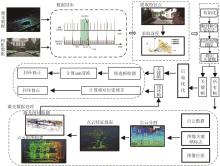
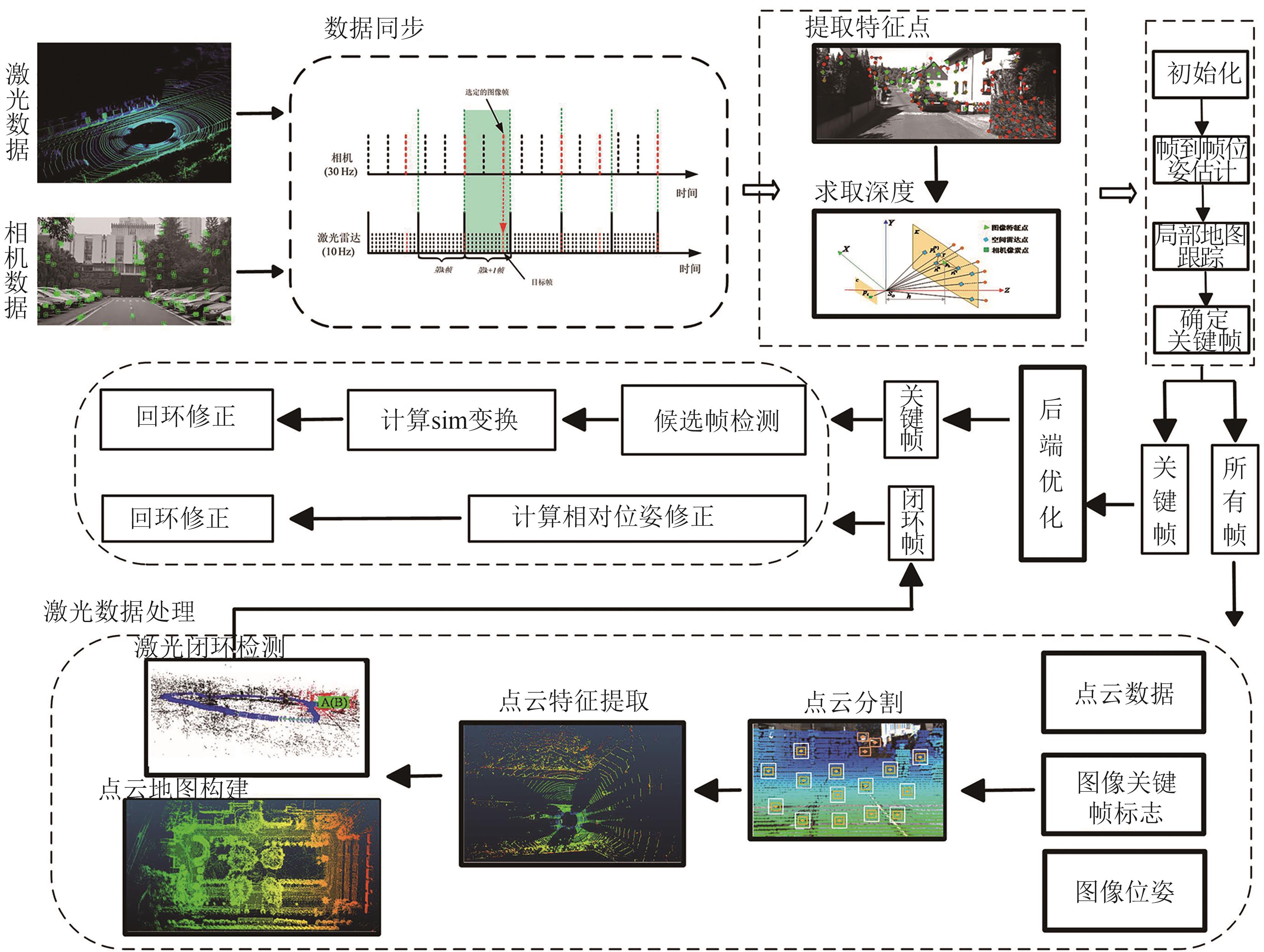
Qinglu Ma,Qiuwei Jian,Meiqiang Li,Zheng Zou. Lane-Level LiDAR-Visual Fusion SLAM in Autonomous Driving Environment[J].Automotive Engineering, 2025, 47(6): 1155-1168.
"

"
"
"

"

"

"
"
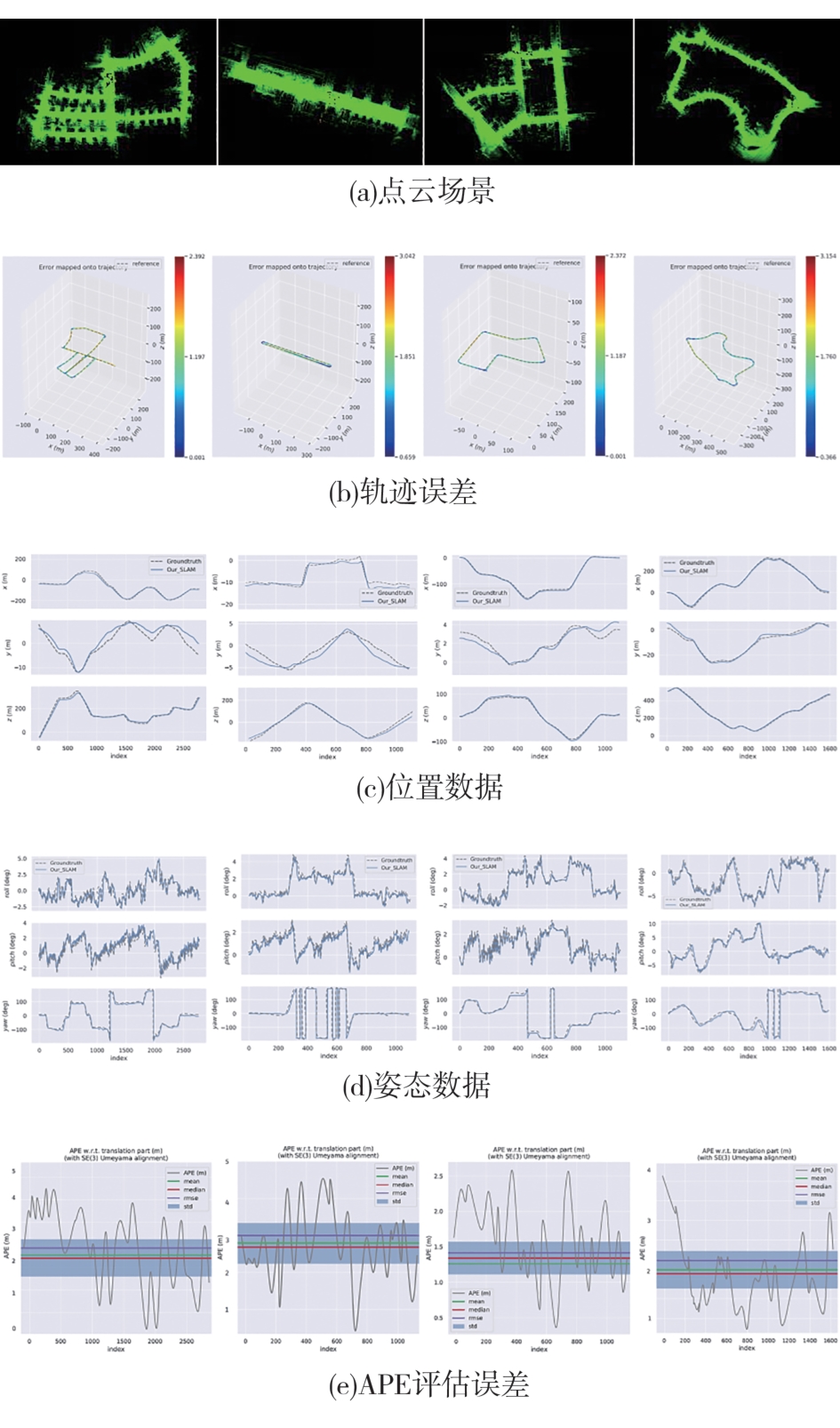
| 场景序号 | Max | Mean | Median | Min | Rmse | Sd |
|---|---|---|---|---|---|---|
| 1 | 4.494 | 2.140 | 2.003 | 0.023 | 2.332 | 1.641 |
| 2 | 4.336 | 3.654 | 3.408 | 0.044 | 3.971 | 3.425 |
| 3 | 2.590 | 1.242 | 1.344 | 0.376 | 1.418 | 0.456 |
| 4 | 4.152 | 2.017 | 1.804 | 0.318 | 2.361 | 1.279 |

"
"
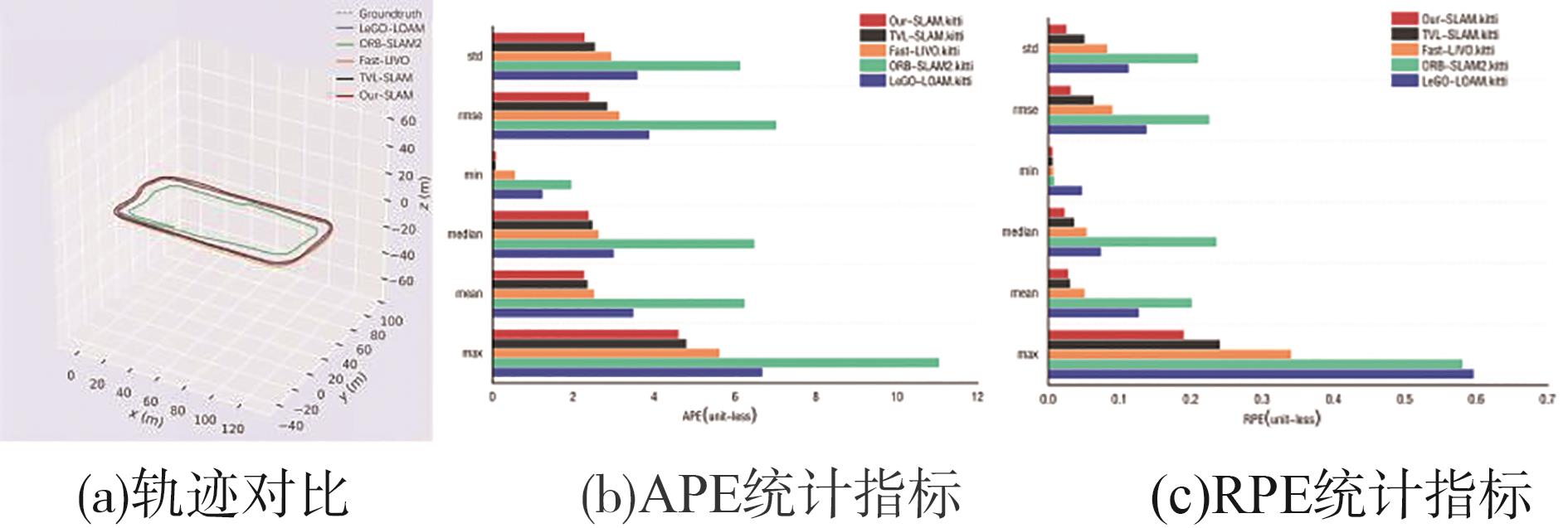
| 误差 | 方法 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | LeGO-LOAM | Fast-LIVO | TVL-SLAM | LLV-SLAM | ||||||
| APE | RPE | APE | RPE | APE | RPE | APE | RPE | APE | RPE | |
| Max | 11.050 2 | 0.581 0 | 6.682 2 | 0.596 5 | 5.623 05 | 0.341 02 | 4.802 36 | 0.241 07 | 4.609 5 | 0.190 5 |
| Mean | 6.241 4 | 0.201 5 | 3.491 1 | 0.127 3 | 2.521 08 | 0.051 5 | 2.360 24 | 0.031 28 | 2.274 6 | 0.028 6 |
| Med | 6.477 9 | 0.236 3 | 3.009 7 | 0.074 3 | 2.634 16 | 0.054 21 | 2.486 41 | 0.036 81 | 2.384 9 | 0.023 5 |
| Min | 1.955 1 | 0.008 9 | 1.245 9 | 0.048 1 | 0.569 81 | 0.007 65 | 0.095 46 | 0.006 97 | 0.103 6 | 0.006 7 |
| RMSE | 7.025 1 | 0.225 9 | 3.889 3 | 0.138 3 | 3.145 92 | 0.090 36 | 2.847 56 | 0.064 25 | 2.403 9 | 0.031 9 |
| SD | 6.135 5 | 0.210 1 | 3.594 0 | 0.113 1 | 2.945 81 | 0.083 12 | 2.546 37 | 0.051 46 | 2.286 3 | 0.026 1 |
"
"


"
"
"
"
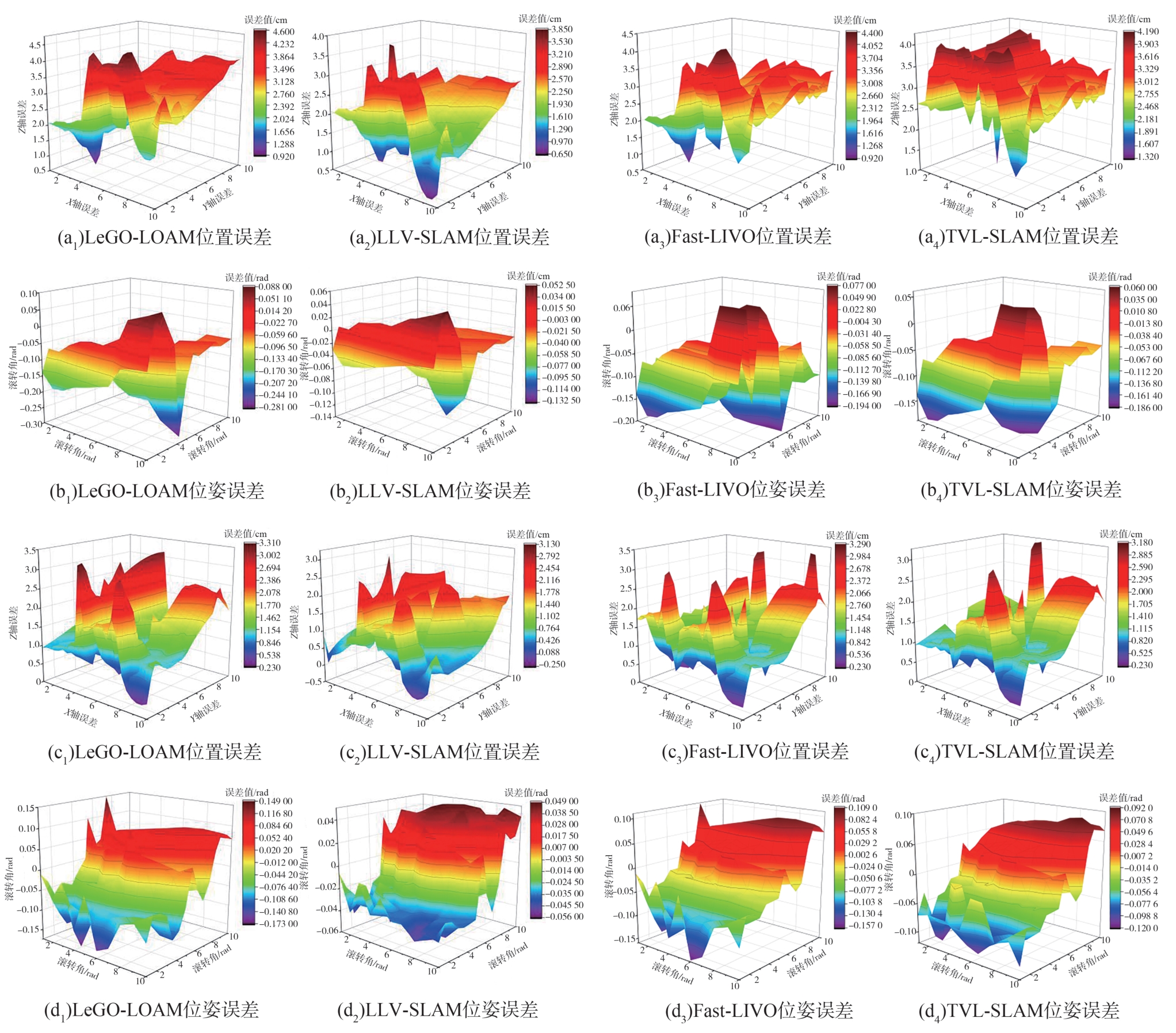
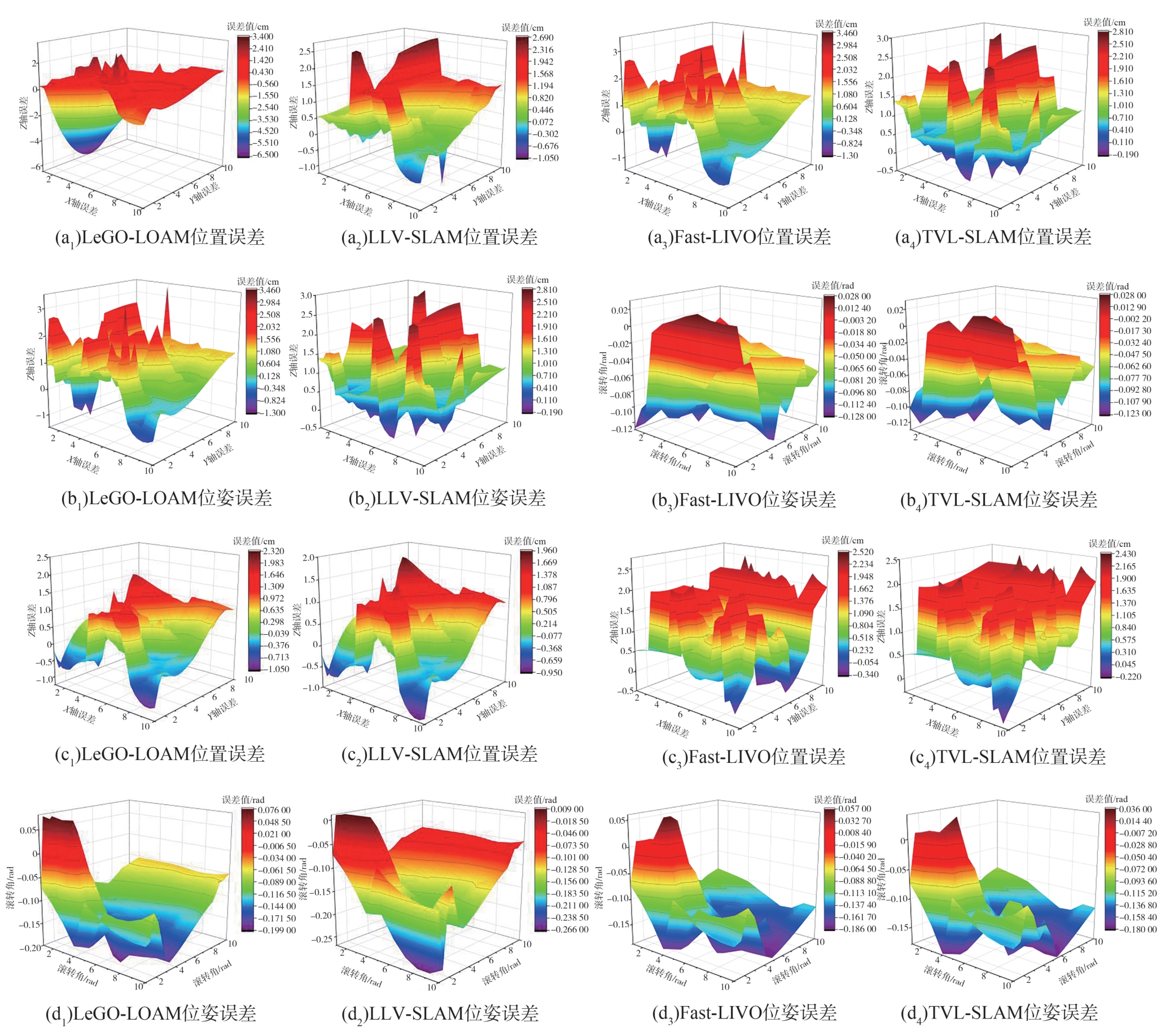
| 降采样值 | 方法 | x/cm | y/cm | z/cm | Pitch/rad | Yam/rad | Roll/rad |
|---|---|---|---|---|---|---|---|
| 1.0 | LeGO-LOAM | 3.854 | 3.787 | 4.600 | 0.207 | 0.261 | 0.281 |
| Fast-LIVO | 3.253 | 2.781 | 3.992 | 0.122 | 0.128 | 0.169 | |
| TVL-SLAM | 3.014 | 2.745 | 3.916 | 0.112 | 0.114 | 0.141 | |
| LLV-SLAM | 2.932 | 2.570 | 3.850 | 0.095 | 0.104 | 0.133 | |
| 1.5 | LeGO-LOAM | 2.390 | 2.694 | 3.312 | 0.246 | 0.224 | 0.262 |
| Fast-LIVO | 2.187 | 2.213 | 3.218 | 0.194 | 0.191 | 0.208 | |
| TVL-SLAM | 2.149 | 2.108 | 3.177 | 0.189 | 0.189 | 0.198 | |
| LLV-SLAM | 2.116 | 1.932 | 3.133 | 0.184 | 0.183 | 0.196 | |
| 2.0 | LeGO-LOAM | 4.625 | 5.512 | 6.581 | 0.154 | 0.133 | 0.172 |
| Fast-LIVO | 2.846 | 2.761 | 2.982 | 0.093 | 0.102 | 0.098 | |
| TVL-SLAM | 2.617 | 2.515 | 2.844 | 0.062 | 0.071 | 0.074 | |
| LLV-SLAM | 2.416 | 2.316 | 2.698 | 0.043 | 0.054 | 0.055 | |
| 2.5 | LeGO-LOAM | 1.783 | 1.239 | 2.323 | 0.127 | 0.131 | 0.132 |
| Fast-LIVO | 1.089 | 1.112 | 2.057 | 0.118 | 0.121 | 0.125 | |
| TVL-SLAM | 0.973 | 0.991 | 1.991 | 0.114 | 0.117 | 0.119 | |
| LLV-SLAM | 0.796 | 0.815 | 1.965 | 0.112 | 0.115 | 0.116 |
"

"
| 降采样值 | LeGO-LOAM | Fast-LIVO | TVL-SLAM | LLV-SLAM |
|---|---|---|---|---|
| 1.0 | 74.794 | 52.339 | 48.335 | 43.679 |
| 1.5 | 40.356 | 34.105 | 28.749 | 24.087 |
| 2.0 | 24.639 | 20.116 | 18.995 | 16.913 |
| 2.5 | 22.246 | 16.659 | 15.423 | 13.733 |
| 1 | 蔡英凤,陆子恒,李祎承,等.基于多传感器融合的紧耦合SLAM系统[J].汽车工程,2022,44(3):350-361. |
| CAI Y F, LU Z H, LI Y C, et al. Tightly coupled SLAM system based on multi-sensor fusion[J]. Automotive Engineering, 2022,44(3):350-361. | |
| 2 | 刘庆运,杨华阳,刘涛,等.基于激光雷达与深度相机融合的SLAM算法[J].农业机械学报,2023,54(11):29-38. |
| LIU Q Y, YANG H Y, LIU T, et al. SLAM algorithm based on the fusion of lidar and depth camera [J]. Journal of Agricultural Machinery, 2023, 54(11): 29-38. | |
| 3 | SHIN Y, PARK Y S, KIM A. DVL-SLAM: sparse depth enhanced direct visual-LiDAR SLAM[J]. Auto. Robots, 2020, 44(2): 115-130. |
| 4 | 李振拯,丁恩杰,王戈琛.基于LiDAR-IMU松耦合的同时定位与建图方法[J].传感器与微系统,2022,41(4):36-39,43. |
| LI Z Z, DING E J, WANG Y C. Simultaneous localization and mapping method based on LiDAR-IMU loose coupling [J]. Sensors and Microsystems, 2022,41(4):36-39,43. | |
| 5 | SUN L, DING G Q, QIU Y, et al. Transformer-based LiDAR-inertial fusion odometry estimation[J] IEEE Sensors Journal,2023,23(18): 22064-22079, |
| 6 | LABBE M, MICHAUD F. Appearance-based loop closure detection for online large-scale and long-term operation[J]. IEEE Transactions on Robotics, 2023,29(3): 734-745. |
| 7 | 任明宇,陈万米,张圆圆.融合激光和视觉信息的机器人SLAM方法研究[J].电子测量技术,2019,42(13): 92-97. |
| REN M Y, CHEN W M, ZHANG Y Y. Research on robot SLAM method combining laser and visual information [J]. Electronic Measurement Technology, 2019, 42(13):92-97. | |
| 8 | 赵良玉,金瑞,朱叶青,等.基于点线特征融合的双目惯性SLAM算法[J].航空学报,2022,43(3):363-377. |
| ZHAO L Y, JIN R, ZHU Y Q, et al. Binocular inertial SLAM algorithm based on point-line feature fusion [J]. Journal of Aeronautics, 2022,43(3):363-377. | |
| 9 | 路春晓,钟焕,刘威,等.复杂地形环境下的多传感器融合SLAM技术[J].机器人:1-11[2024-07-05]. |
| LU C X, ZHONG H, LIU W, et al. Multi-sensor fusion SLAM technology in complex terrain environment [J]. Robot:1-11[2024-07-05] | |
| 10 | YIN J, LUO D T, YAN F, et al. A novel lidar-assisted monocular visual SLAM framework for mobile robots in outdoor environments[J]. IEEE Transactions on Instrumentation and Measurement, 2022,71(8503911):1-11. |
| 11 | 陈绵书,于录录,李晓妮,等.基于均匀ORB特征的回环检测算法[J].吉林大学学报(工学版),2023,53(9):2666-2675. |
| CHEN M S, YU L L, LI X N, et al. Loop closure detection algorithm based on uniform ORB feature [J]. Journal of Jilin University ( Engineering Edition ), 2023,53(9):2666-2675. | |
| 12 | 李荣华,祁宇峰,谢辉,等.面向未知环境的紧耦合激光SLAM方法[J].红外与激光工程,2023,52(9):135-144. |
| LI R H, QI Y F, XIE H, et al. Tightly coupled laser SLAM method for unknown environment [J]. Infrared and Laser Engineering, 2023, 52 (9):135-144. | |
| 13 | 李少伟,钟勇,杨华山,等.融合激光雷达和RGB-D相机建图[J].福建理工大学学报,2023,21(6):551-557. |
| LI S W, ZHONG Y, YANG H S, et al. Fusion of laser radar and RGB-D camera mapping [J]. Journal of Fujian University of Science and Technology, 2023, 21(6):551-557. | |
| 14 | 刘鸿勋,王伟.双目相机和激光雷达的融合SLAM研究[J].南京师范大学学报(工程技术版),2021,21(1):64-71. |
| LIU H X, WANG W. Research on fusion SLAM of binocular camera and lidar [J]. Journal of Nanjing Normal University (Engineering Technology Edition), 2021, 21(1):64-71. | |
| 15 | ZHAO H R, QIAO X Q, TAN Z J, et al. Loosely coupled visual-inertial odometry based on spatial-temporal two-stream convolution and long short-term memory networks[J]. Chinese Journal of Computers, 2022,45(8): 1674-1686. |
| 16 | 王乐兵,王挺,姜祎,等.基于地面约束的改进A-LOAM算法[J].计算机仿真,2023,40(5):462-466. |
| WANG L B, WANG T, JIANG Y, et al. Improved A-LOAM algorithm based on ground constraint[J]. Computer Simulation, 2023,40(5): 462-466. | |
| 17 | CHOU C C, CHOU C F. Efficient and accurate tightly-coupled visual-lidar SLAM[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(9):14509-14523. |
| 18 | LI R, ZHANG X, ZHANG S, et al. BA-LIOM: tightly coupled laser-inertial odometry and mapping with bundle adjustment[J]. Robot, 2024,42(3): 684-700. |
| 19 | WANG K, MA S, REN F, et al. SBAS: salient bundle adjustment for visual SLAM[J], IEEE Transactions on Instrumentation and Measurement,2021,70(5014709):1-9. |
| 20 | YUAN Z K, WANG Q J, ZHENG J, et al. SDV-LOAM: semi-direct visual-LiDAR odometry and mapping[J].IEEE Transactions on Pattern Analysis and Machine Intelligenc, 2023,45(9):11203-11220. |
| 21 | HAN Y, YANG X, PU T, et al. Fine-grained recognition for oriented ship against complex scenes in optical remote sensing Images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 6(4): 5612-5633. |
| 22 | ZHANG J M, CHEN S, XUE Q Y, et al. LeGO-LOAM-FN: an improved simultaneous localization and mapping method fusing LeGO-LOAM, faster_GICP and NDT in complex orchard environments[J]. Sensors, 2024, 24(2):551. |
| 23 | LIU A D, ZHANG B X, CUI Q, et al. A dynamic fusion path planning algorithm for mobile robots incorporating improved IB-RRT and deep reinforcement learning[J]. High Technology Letters,2023,29(4):365-376. |
| 24 | HUANG L, ZHU Z, YUN J, et al. Semantic loopback detection method based on instance segmentation and visual SLAM in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems,2024, 25(3): 3118-3127. |
| 25 | HE X, PAN S, GAO W, et al. LiDAR-Inertial-GNSS fusion positioning system in urban environment: local accurate registration and global drift-free[J]. Remote Sensing, 2022, 14(9): 2104-2115. |
| [1] | Mingchen Wang,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. MSF-Diffuser: A Multi-sensor Adaptive Fusion Autonomous Driving Method Based on Diffusion Model Under BEV [J]. Automotive Engineering, 2025, 47(6): 1122-1132. |
| [2] | Lingyun Zhu,Haiyang Wang. Autonomous Vehicle Object Detection by LiDAR Point Cloud Feature Completion in Snowfall Scenarios [J]. Automotive Engineering, 2025, 47(6): 1133-1143. |
| [3] | Chenyu Liu,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Camera and Radar Fusion for Autonomous Driving Scenarios [J]. Automotive Engineering, 2025, 47(5): 829-838. |
| [4] | Qirui Qin,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Real-Time Instance Segmentation Algorithm for Autonomous Driving Based on Instance Activation Maps [J]. Automotive Engineering, 2025, 47(4): 614-624. |
| [5] | Jinhui Suo, Xiaowei Wang, Peiwen Jiang, Chi Ding, Ming Gao, Yougang Bian. Domain Adaptive Visual Object Detection for Autonomous Driving Based on Multi-granularity Relation Reasoning [J]. Automotive Engineering, 2025, 47(2): 201-210. |
| [6] | Jiangkun Li,Ruixue Zong,Weiwen Deng,Ying Wang,Juan Ding. Directed Graph-Based Method for Evaluating Similarity in Urban Intersection Scenarios [J]. Automotive Engineering, 2025, 47(1): 23-34. |
| [7] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [8] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [9] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [10] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [11] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [12] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [13] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [14] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [15] | Jiqing Chen,Yuxiang Che,Xiaoqiang Tian,Fengchong Lan,Yunjiao Zhou. Research on Real-Time Visual SLAM Method Based on 3D Multi-Object Tracking in Dynamic Scenes [J]. Automotive Engineering, 2024, 46(5): 776-783. |
|
||