Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (9): 1647-1654.doi: 10.19562/j.chinasae.qcgc.2025.09.001
Xin Guan,Sishen Li,Xin Jia( )
)
Received:2024-11-22
Revised:2025-01-04
Online:2025-09-25
Published:2025-09-19
Contact:
Xin Jia
E-mail:jiaxin@jlu.edu.cn
Xin Guan,Sishen Li,Xin Jia. Study on Spatial Preview Tracking Method for Autonomous Vehicle Speed Tracking[J].Automotive Engineering, 2025, 47(9): 1647-1654.

"
"
"

"
"

"
"
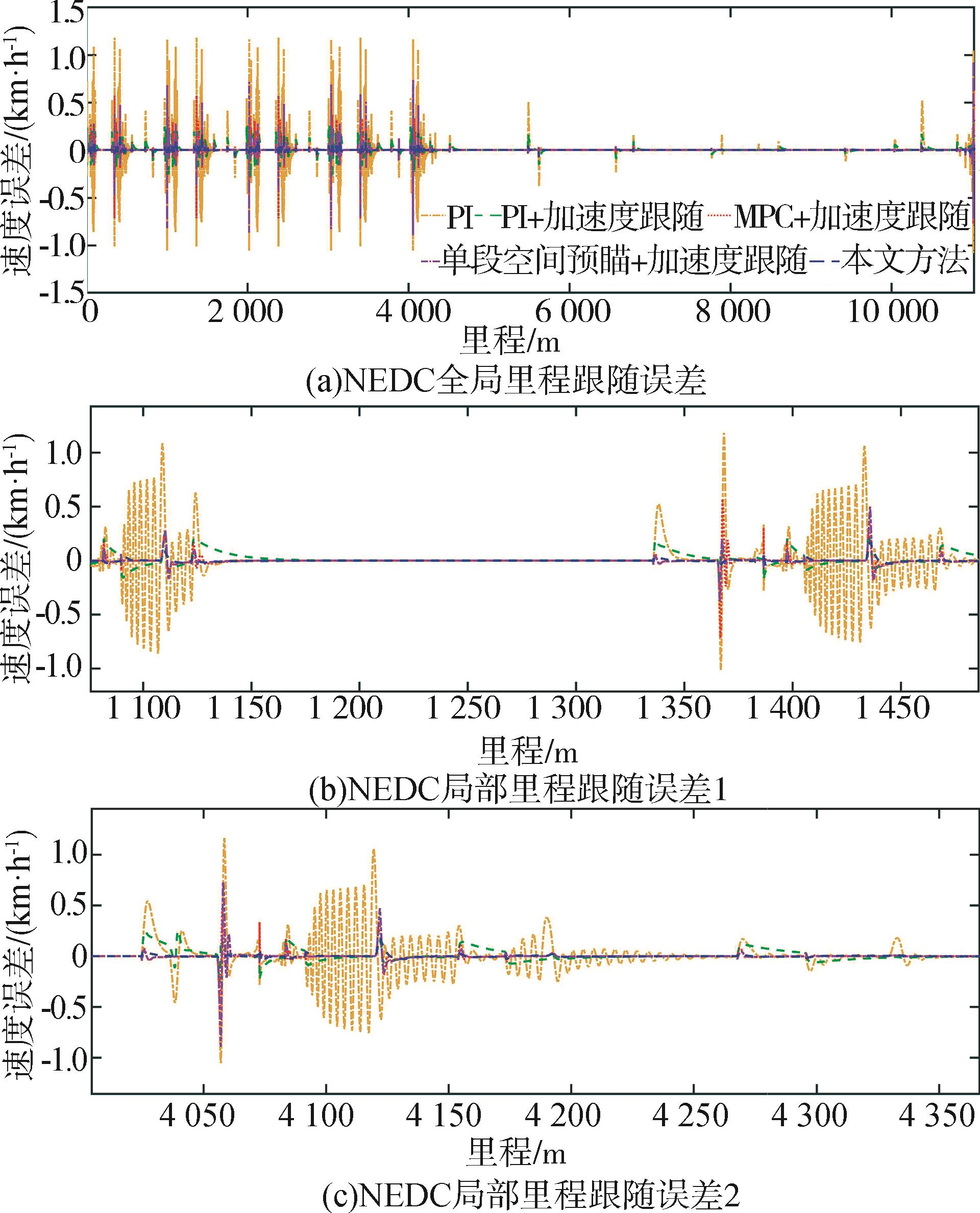
| 方法 | 车速跟随方法 |
|---|---|
| 1 | PI |
| 2 | PI+加速度跟随 |
| 3 | MPC+加速度跟随 |
| 4 | 单段空间预瞄+加速度跟随 |
| 5 | 本文方法 |
"
"


"
"


"

"
| 方法 | |||
|---|---|---|---|
| 1 | 1.18 | 0.058 | 0.137 |
| 2 | 0.38 | 0.026 | 0.045 |
| 3 | 0.78 | 0.008 | 0.037 |
| 4 | 0.73 | 0.007 | 0.036 |
| 5 | 0.17 | 0.005 | 0.010 |
"
| 方法 | |||
|---|---|---|---|
| 1 | 2.94 | 0.137 | 0.212 |
| 2 | 0.91 | 0.031 | 0.063 |
| 3 | 1.01 | 0.015 | 0.050 |
| 4 | 0.98 | 0.011 | 0.038 |
| 5 | 0.79 | 0.010 | 0.023 |
| [1] | 陈晓冰, 张为公, 张丙军. 汽车驾驶机器人车速跟踪控制策略研究[J]. 中国机械工程, 2005, 16(18): 1669-1673. |
| CHEN X B, ZHANG W G, ZHANG B J. Study on speed tracking control strategy for robot driver on chassis dynamometer[J]. China Mechanical Engineering, 2005, 16(18): 1669-1673. | |
| [2] | THRUN S, MONTEMERLO M, PALATUCCI M. Stanley: the robot that won the darpa grand challenge[J]. Journal of Field Robotics, 2009, 23(9): 661-692. |
| [3] | LEONARD J, HOW J, TELLER S, et al. A perception‐driven autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25(10): 727-774. |
| [4] | TIWARI R, KULKARNI A R. Longitudinal speed control of electric vehicle to reduce road speed limit violations[J]. Advances in Mechanical Engineering and Technology, 2022: 575-582. |
| [5] | OLEIWI B K, MOHAMED M J. Optimal design of linear and nonlinear PID controllers for speed control of an electric vehicle[J]. Journal of Intelligent Systems, 2024, 33(1): 11-85. |
| [6] | 陈刚, 张为公. 基于模糊自适应PID的汽车驾驶机器人的车速控制[J]. 汽车工程, 2012, 34(6): 511-516. |
| CHEN G, ZHANG W G. Speed control of vehicle robot driver based on adaptive fuzzy PID control[J]. Automotive Engineering, 2012, 34(6): 511-516. | |
| [7] | NIE L Z, GUAN J Y, LU C H, et al. Longitudinal speed control of autonomous vehicle based on a self-adaptive PID of radial basis function neural network[J]. IET Intelligent Transport System, 2018, 12(6): 485-494. |
| [8] | KHOOBAN M H, VAFAMAND N, NIKNAM T. T–S fuzzy model predictive speed control of electrical vehicles[J]. Isa Transactions, 2016, 64(5):231-240. |
| [9] | MURAYAMA A, YAMAKITA M. Speed control of vehicles with variable valve lift engine by nonlinear MPC[C].ICROS-SICE International Joint Conference: 2009. Fukuoka: IEEE, 2009: 4128-4133. |
| [10] | 洪金龙, 张国旭, 程一帆, 等. 低速巡航工况非线性车速跟踪控制[J]. 同济大学学报(自然科学版), 2022, 50(S01): 145-150. |
| HONG J L, ZHANG G X, CHENG Y F, et al. Nonlinear speed tracking control of vehicles during low speed cruise[J]. Journal of Tongji University(Natural Science), 2022, 50(S01): 145-150. | |
| [11] | XU S, PENG H, SONG Z, et al. Accurate and smooth speed control for an autonomous vehicle[C].IEEE Intelligent Vehicles Symposium (IV): 2018. Changshu: IEEE, 2018: 1976-1982. |
| [12] | ZHU M, CHEN H, XIONG G. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87(6): 138-152. |
| [13] | 朱敏. 智能车辆纵向速度跟踪与控制方法研究[D]. 北京: 北京理工大学, 2016. |
| ZHU M. Longitudinal speed tracking and control method for intelligent vehicles[D]. Beijing: Beijing Institute of Technology, 2016. | |
| [14] | KONG J, PFEIFFER M, SCHILDBACH G, et al. Kinematic and dynamic vehicle models for autonomous driving control design[C].Intelligent Vehicles Symposium (IV): 2105. Seoul: IEEE, 2015: 1094-1099. |
| [15] | 储灿灿,王东,张为公,等.基于逆控制策略模型的电动车驾驶机器人车速控制[J]. 汽车工程, 2020, 42(9): 1166-1173. |
| CHU C C, WANG D, ZHANG W G, et al. Vehicle speed control of electric vehicle driving robot based on inverse control strategy model[J]. Automotive Engineering, 2020, 42(9): 1166-1173. | |
| [16] | GUO K H, DING H T, ZHANG J W, et al. Development of a longitudinal and lateral driver model for autonomous vehicle control[J]. International Journal of Vehicle Design, 2004, 36(1): 50-65. |
| [17] | 张立存. 汽车驾驶员控制行为统一决策模型研究[D]. 长春: 吉林大学, 2007. |
| ZHANG L C. Research on unified driver model for vehicle assistant control[D]. Changchun: Jilin University, 2007. | |
| [18] | 张立增. 智能汽车方向与速度综合决策的混合机理与规则建模研究[D]. 长春:吉林大学, 2017. |
| ZHANG L Z. Research on the hybrid mechanism and rule based modelling for the comprehensive decision of intelligent vehicles’ direction and speed[D]. Changchun: Jilin University, 2017. | |
| [19] | GUAN HS, HE F, ZHANG L Z, et al. Comprehensive preview decision-making method for direction and speed of intelligent vehicle based on rules and mechanisms[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(5): 780-793. |
| [20] | ZHANG S, LIU X, DENG G, et al. Longitudinal and lateral control strategies for automatic lane change to avoid collision in vehicle high-speed driving[J]. Sensors, 2023, 23(11): 5301-5320. |
| [1] | Chao Wei,Shuxin Sui,Luxing Li. PolarSparse4D: Polar Parametrization for Vision-Based Surround-View Temporal Sparse 3D Object Detection [J]. Automotive Engineering, 2025, 47(6): 1198-1206. |
| [2] | Hai Wang,Guirong Zhang,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-modal Data Mining Algorithm for Corner Case of Automatic Driving Road Scene [J]. Automotive Engineering, 2024, 46(7): 1239-1248. |
| [3] | Guodong Wang,Li Liu,Yu Meng,Haiping Du,Guoxing Bai,Qing Gu. Research on Collision Avoidance Limit of Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(6): 985-994. |
| [4] | Guodong Du,Yuan Zou,Xudong Zhang,Wenjing Sun,Wei Sun. Research on Automatic Driving Motion Control Based on Double Estimator Reinforcement Learning Combined with Forward Predictive Control [J]. Automotive Engineering, 2024, 46(4): 564-576. |
| [5] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [6] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [7] | Mengxi Wang,Yingfeng Cai,Hai Wang,Zhongyu Rao,Long Chen,Yicheng Li. Vehicle Trajectory Prediction Method Based on Graph Convolutional Interaction Network [J]. Automotive Engineering, 2024, 46(10): 1863-1872. |
| [8] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [9] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [10] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [11] | Xinrong Zhang,Yuhang Tan,Yifan Jia,Jin Huang,Quanning Xu. Robust Control of Path Tracking for Four-Wheel Independent Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(2): 253-262. |
| [12] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [13] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [14] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [15] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
|
||