汽车工程 ›› 2025, Vol. 47 ›› Issue (12): 2378-2386.doi: 10.19562/j.chinasae.qcgc.2025.12.010
黄殷梓1,朱冰1,赵健1,张培兴1( ),高质桐1,韩嘉懿1,范欣炜2
),高质桐1,韩嘉懿1,范欣炜2
Yinzi Huang1,Bing Zhu1,Jian Zhao1,Peixing Zhang1(),Zhitong Gao1,Jiayi Han1,Xinwei Fan2
摘要:
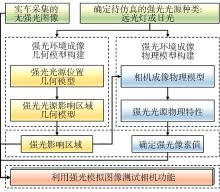
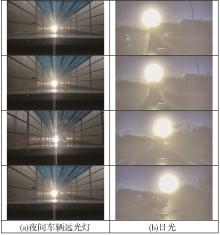
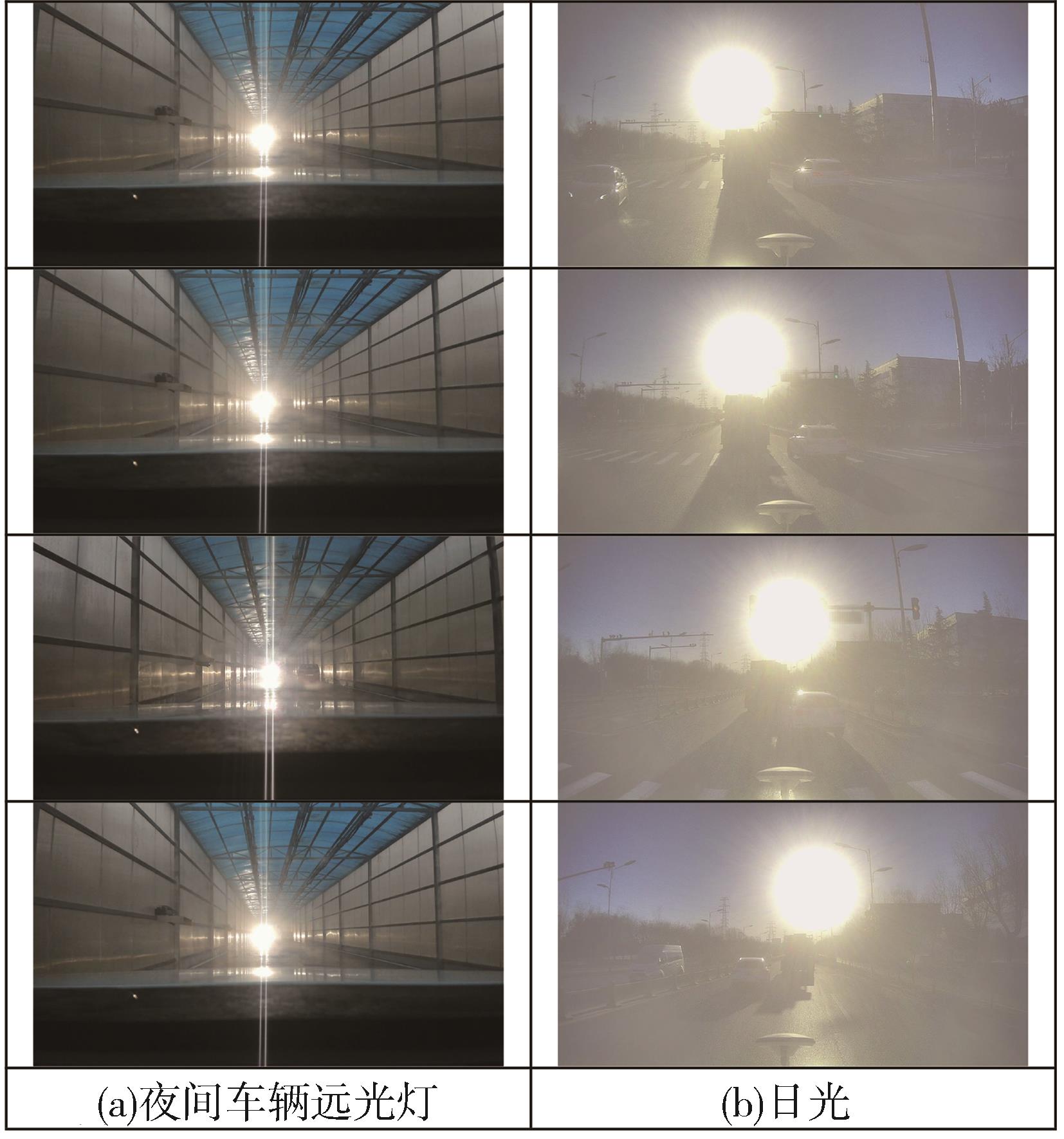
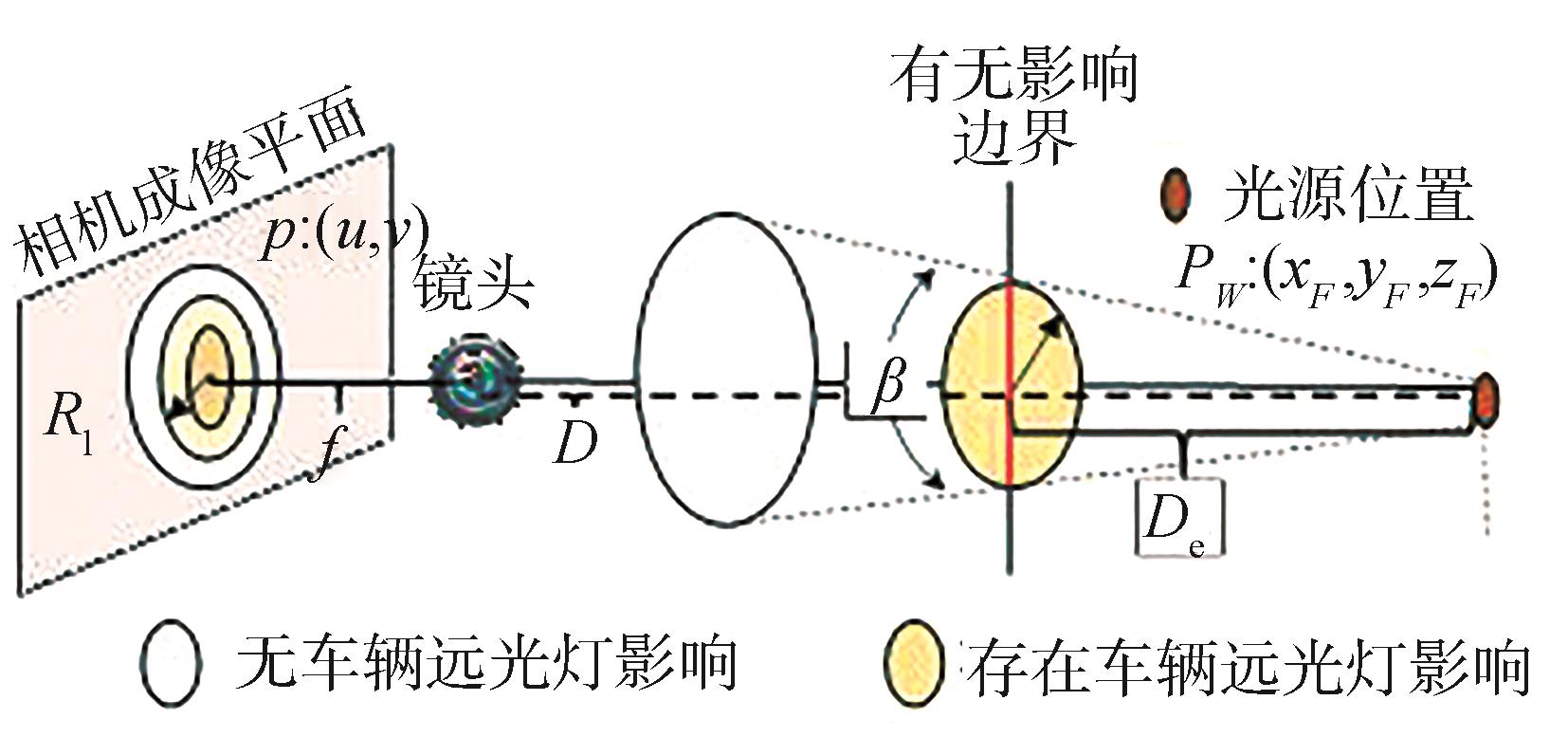
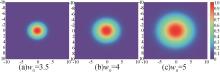
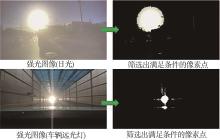
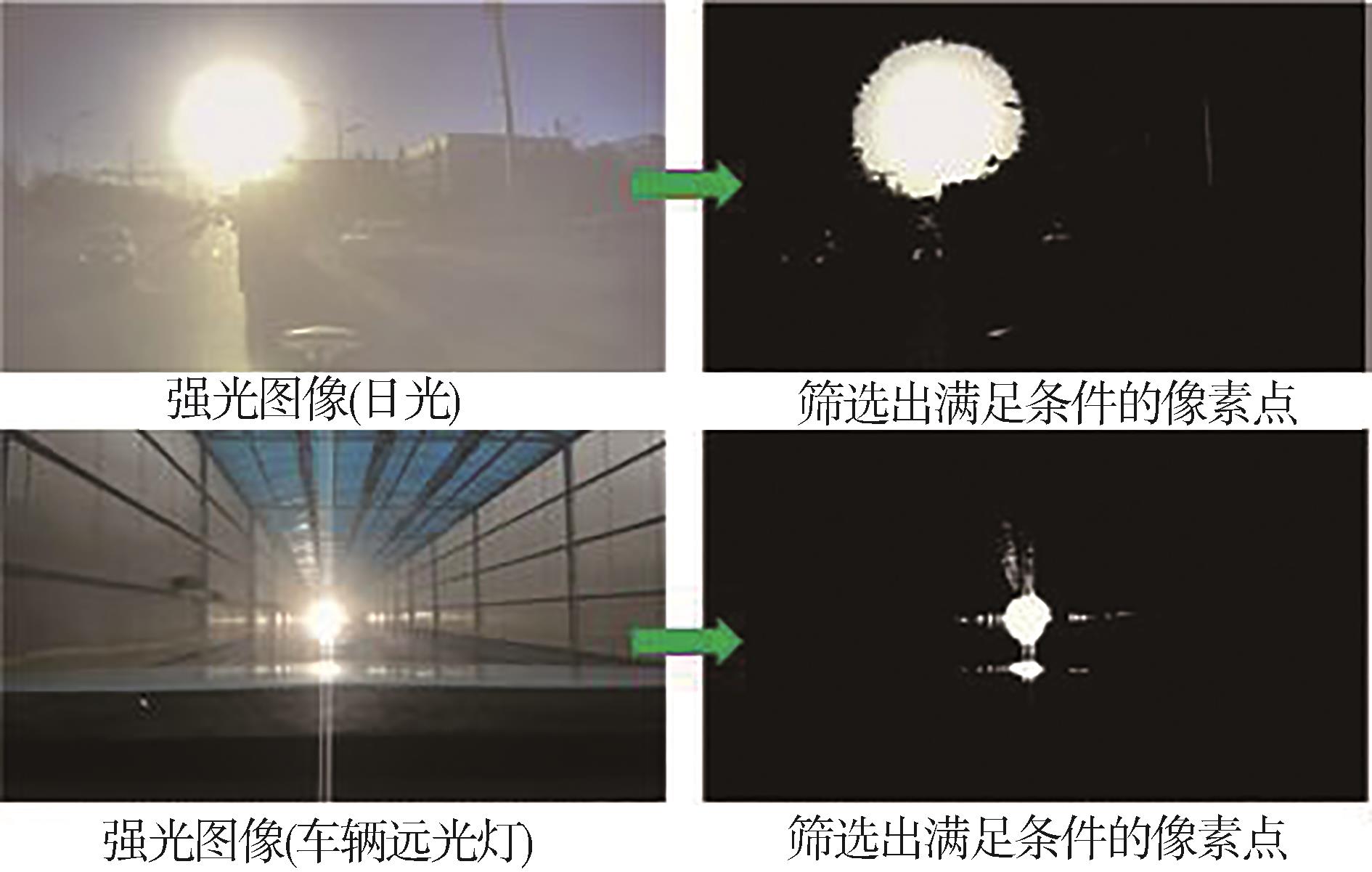
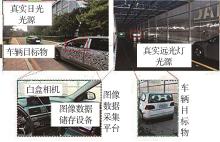
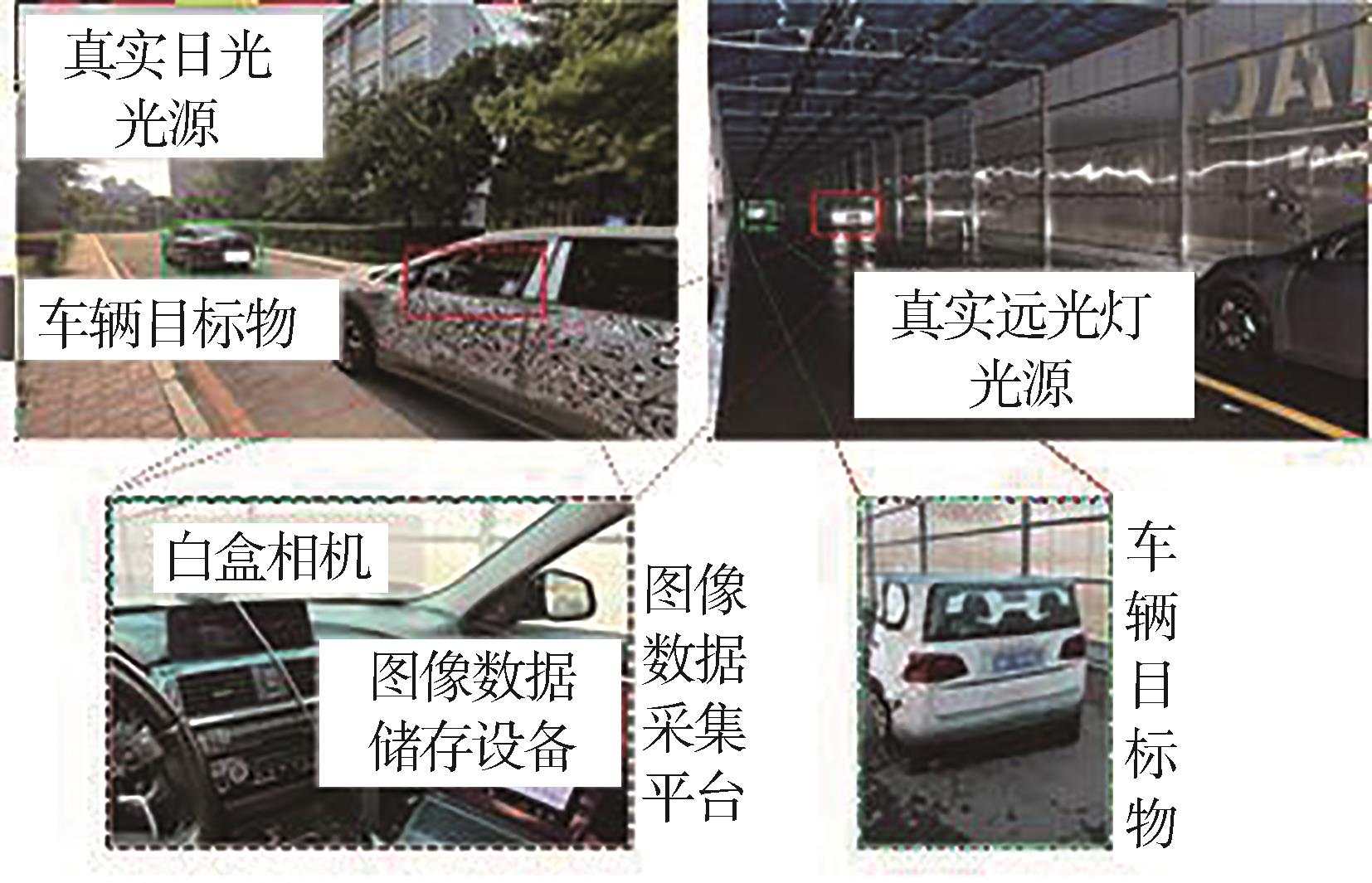
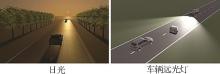
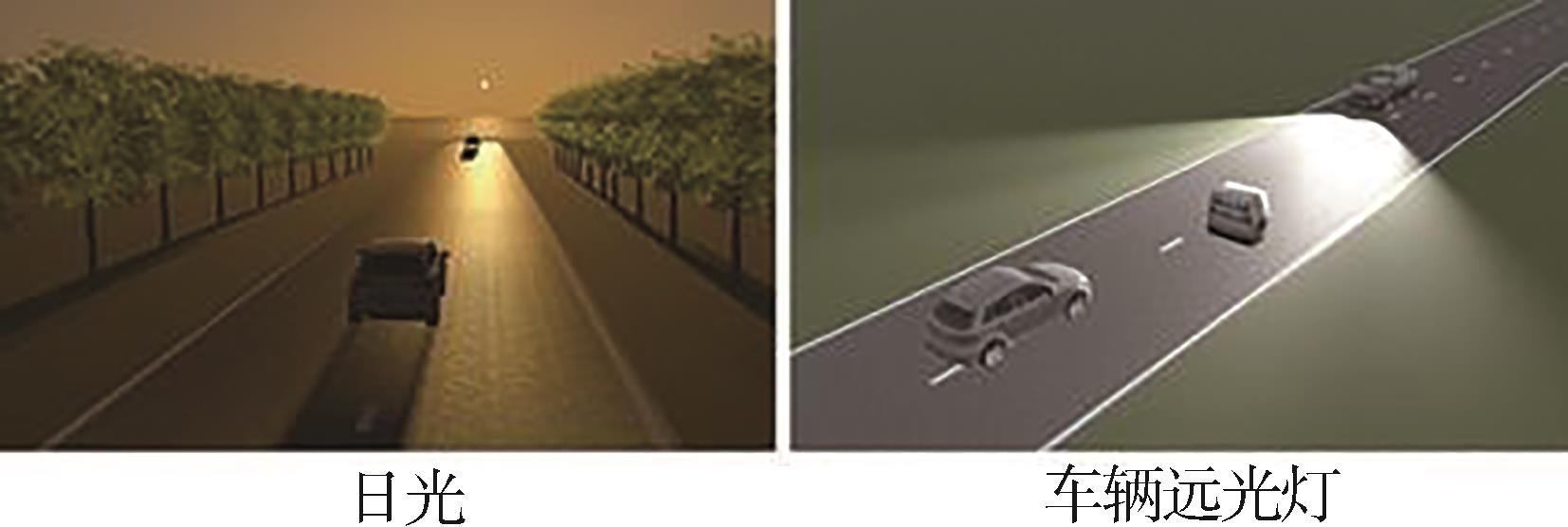
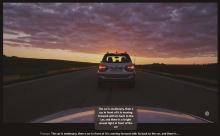
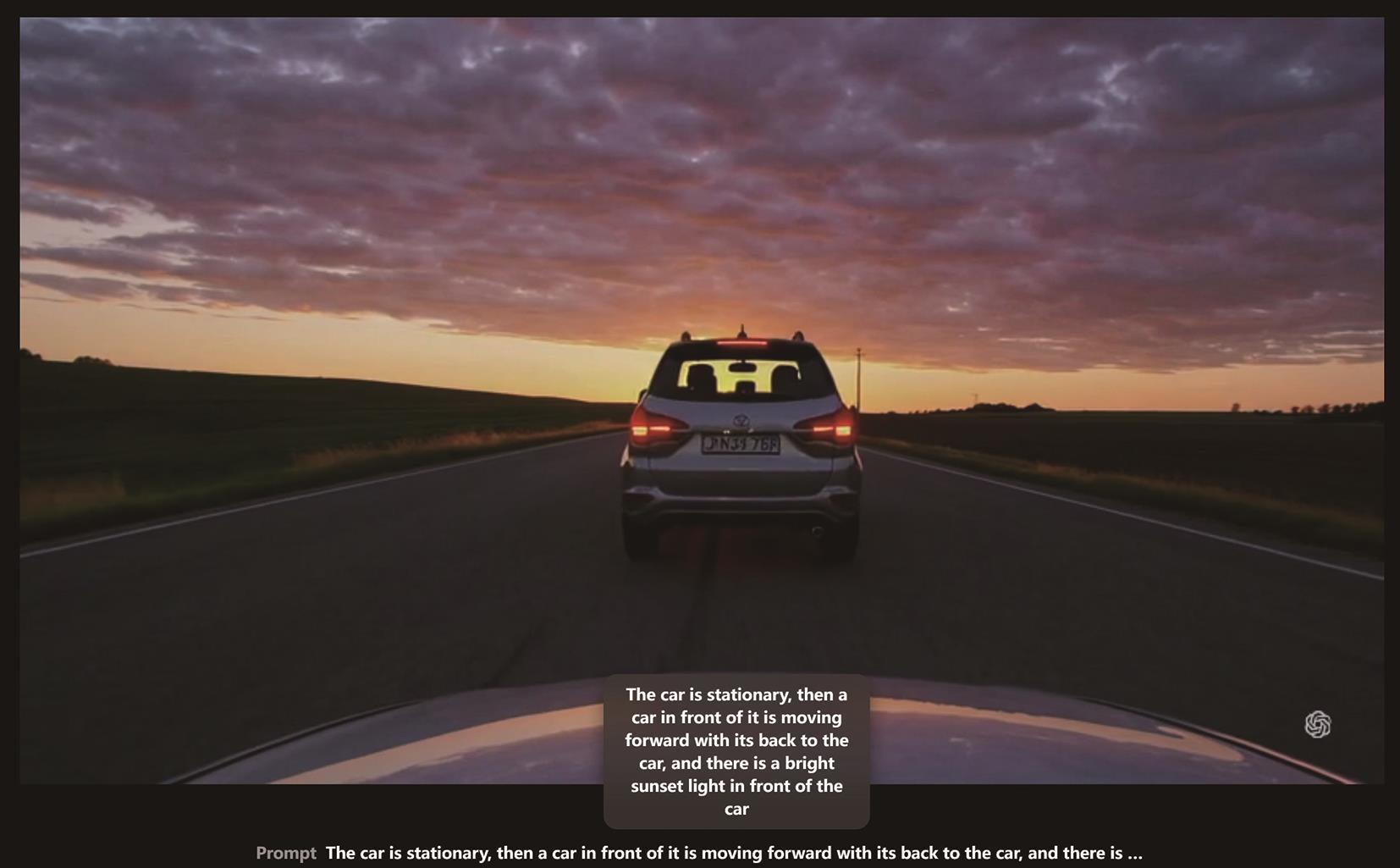
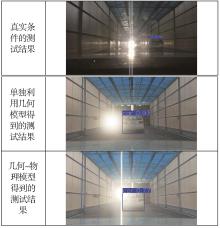
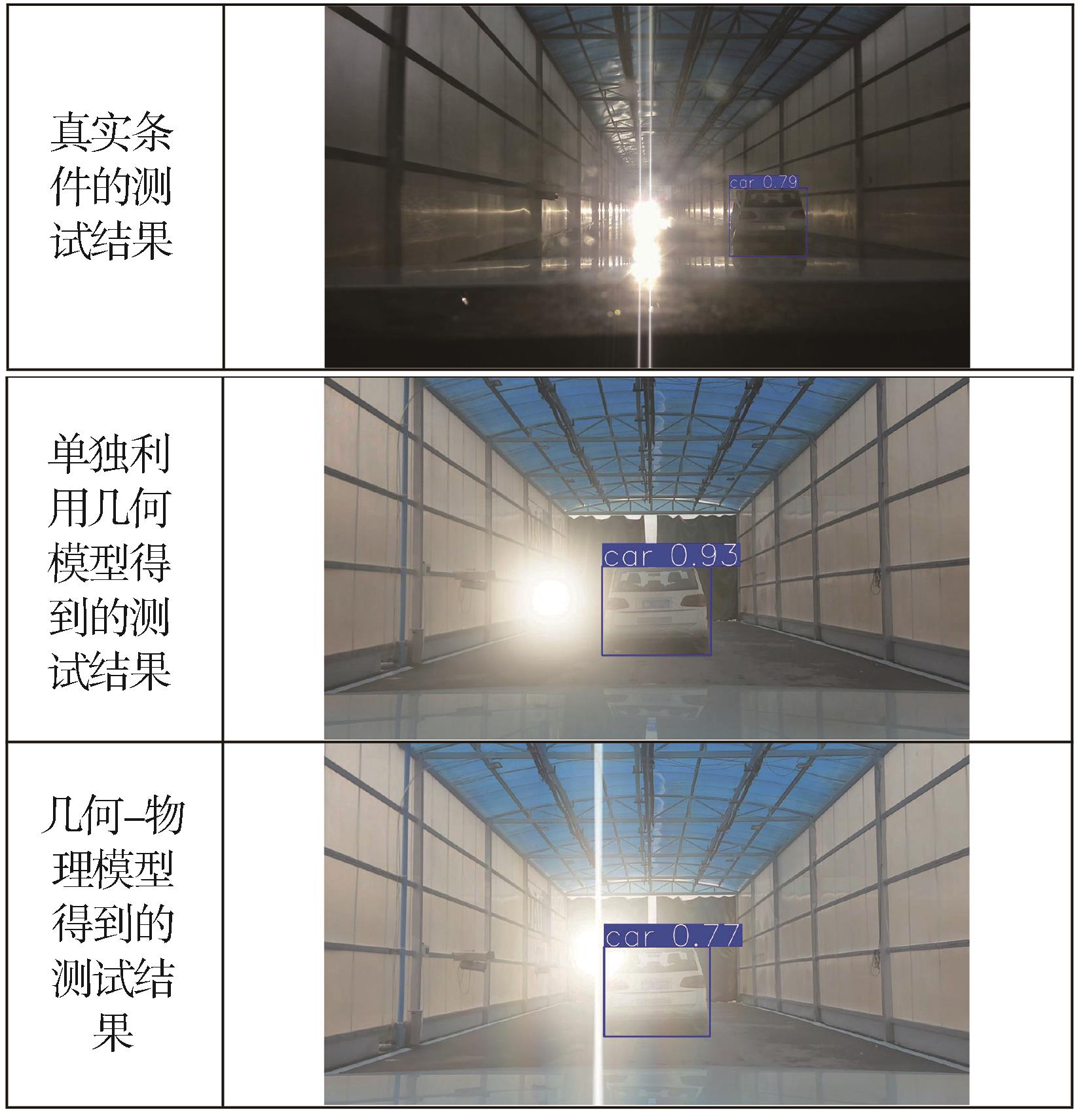
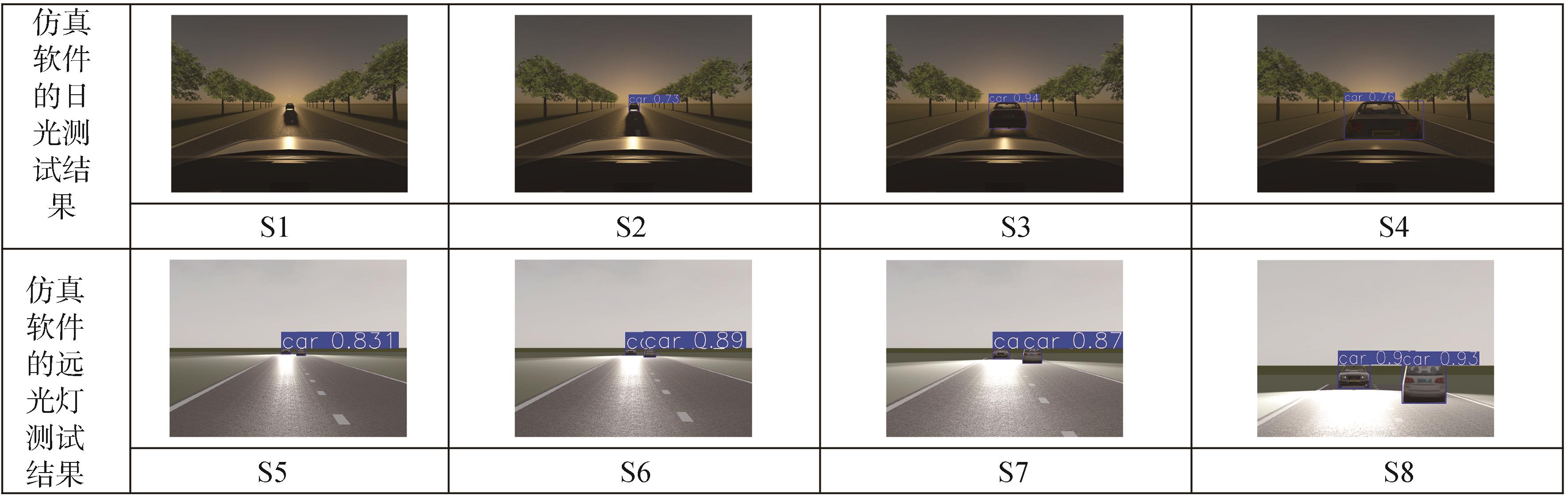
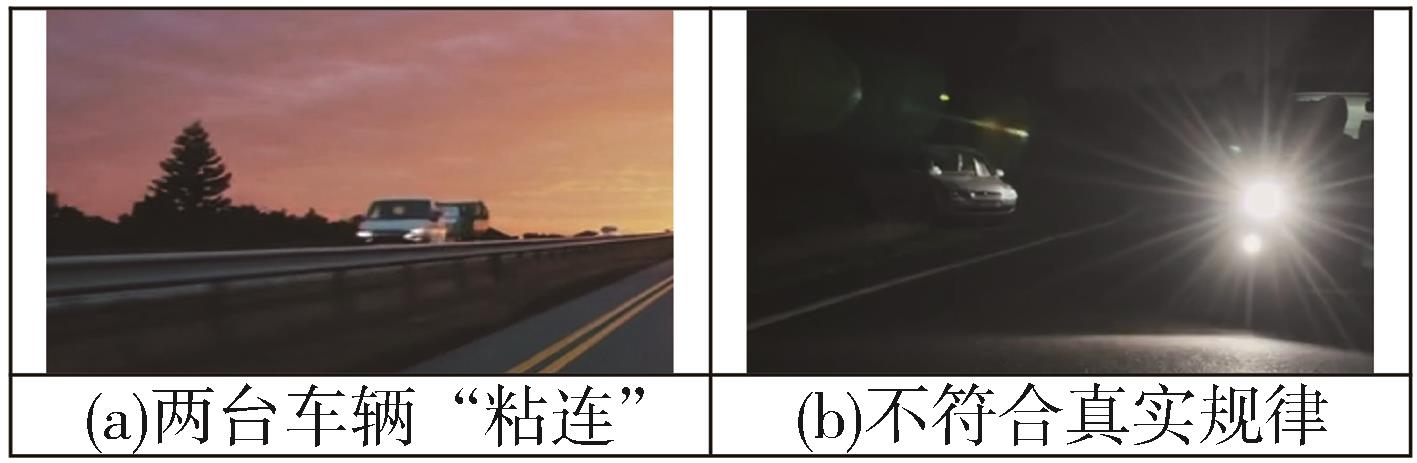
由车辆远光灯、日光等光源产生的强光环境会对智能汽车相机功能产生较大影响,建立面向强光环境准确且可控的测试方法对提高智能汽车环境适应性具有重要意义。然而,基于实车道路或封闭场地进行强光实景测试存在测试成本高、周期长且场景难以精准可控复现的问题。本文提出一种面向强光环境的智能汽车相机功能仿真测试方法,通过几何-物理融合仿真模型模拟强光环境中的图像响应,并利用强光模拟图像测试智能汽车相机功能。首先,构建强光光源的几何位置和影响区域范围模型;其次,利用相机成像物理模型和强光光源物理特性确定强光影响对应的像素强度,基于强光影响区域和强光像素值将实车采集的无强光图像合成为强光模拟图像;最后,以真实强光环境测试结果作为真值,对比传统仿真软件、大模型方法和本文方法针对强光环境下相同相机功能的测试结果。实验结果表明,本文提出的方法能够提高强光环境仿真测试的性能,相较于传统仿真软件和大模型方法实现了更有效且准确的强光环境相机功能测试,同时相较于物理实景测试具有测试成本低、效率高且仿真模拟参数精准可控的优势。