汽车工程 ›› 2021, Vol. 43 ›› Issue (9): 1350-1359.doi: 10.19562/j.chinasae.qcgc.2021.09.012
郭祥靖( ),孙攀,邓杰,刘勇,刘壮,刘双平
),孙攀,邓杰,刘勇,刘壮,刘双平
Xiangjing Guo(),Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu
摘要:
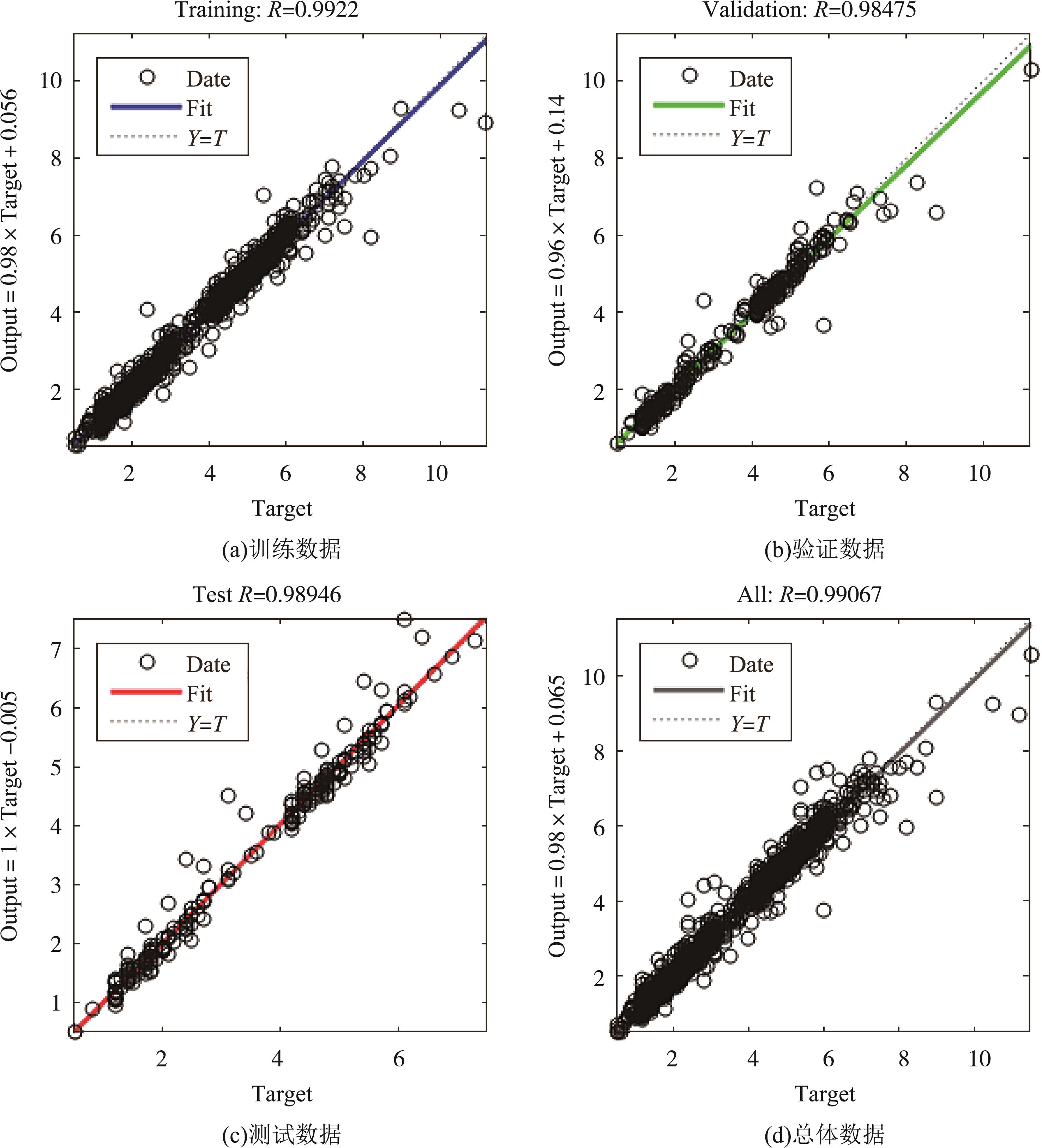
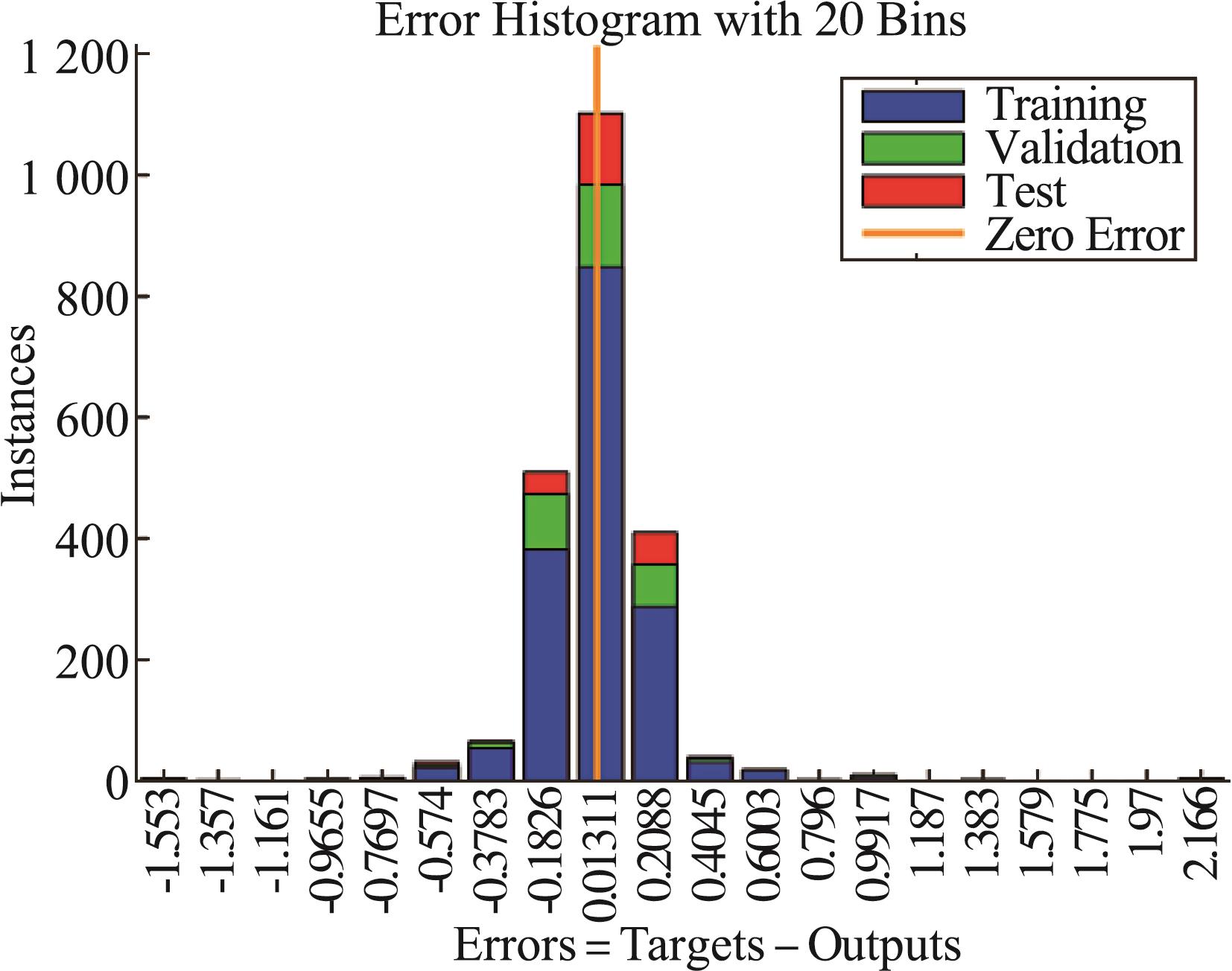
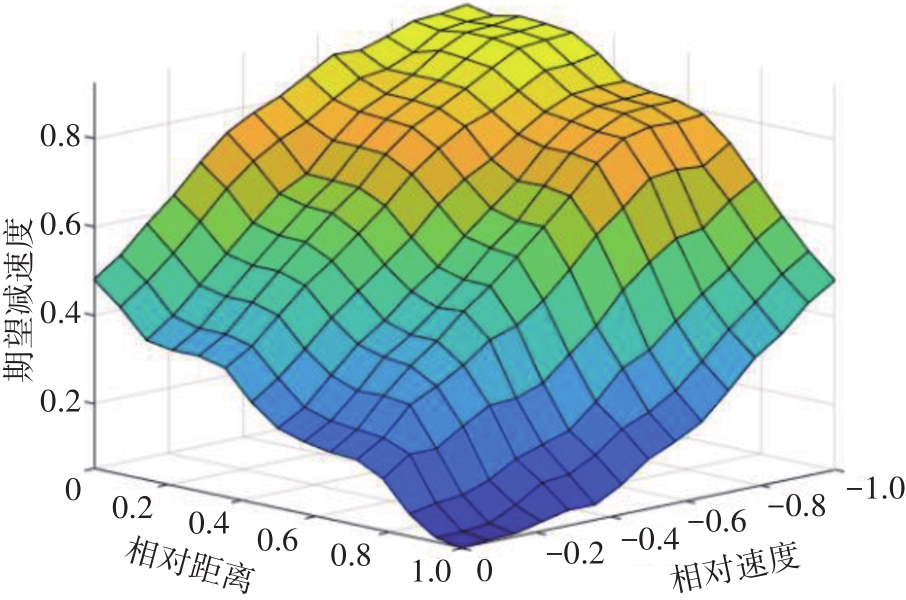
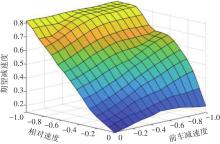
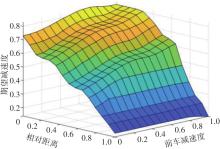
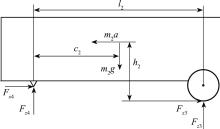
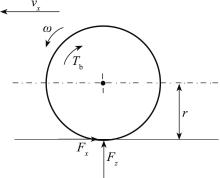
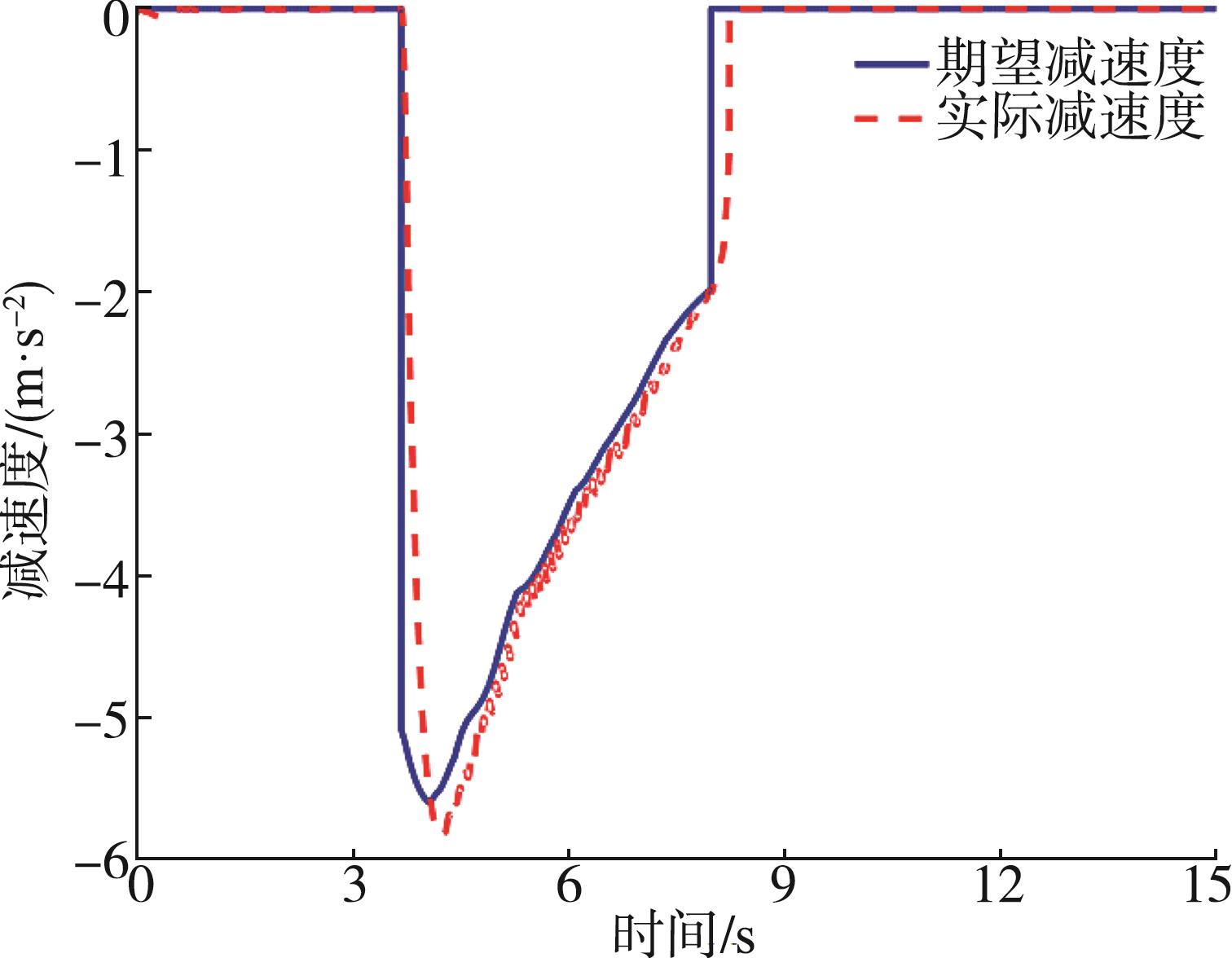
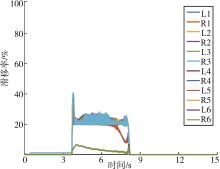
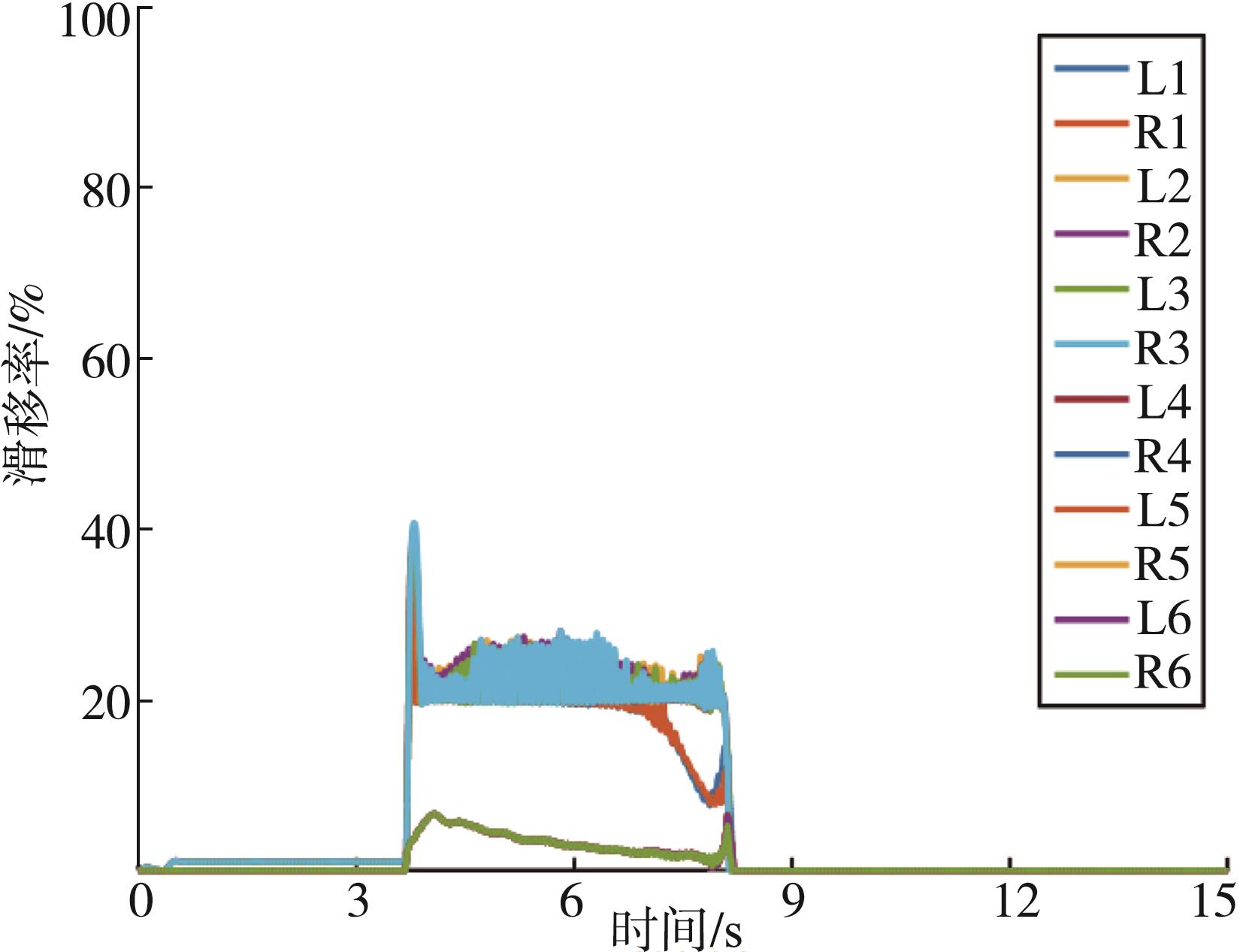
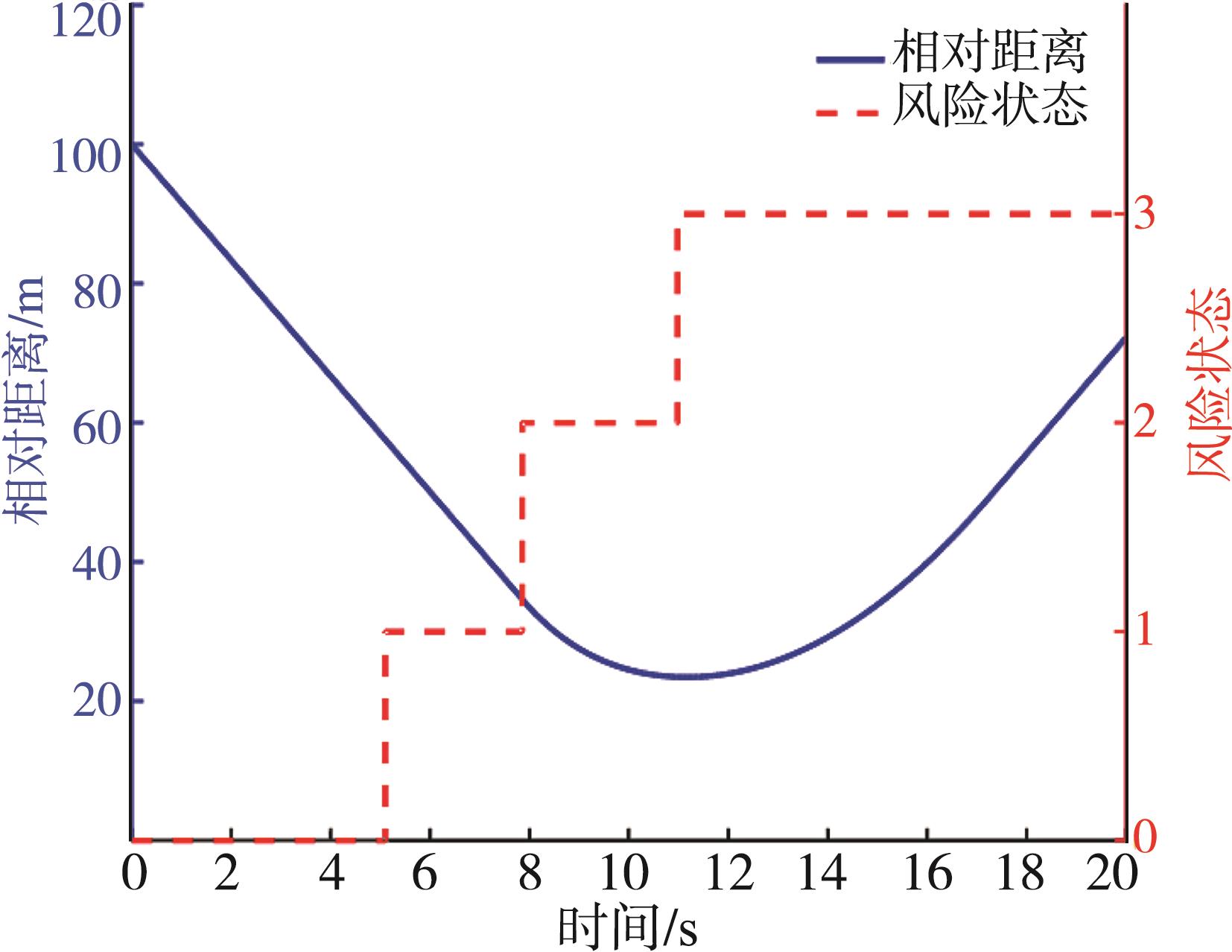
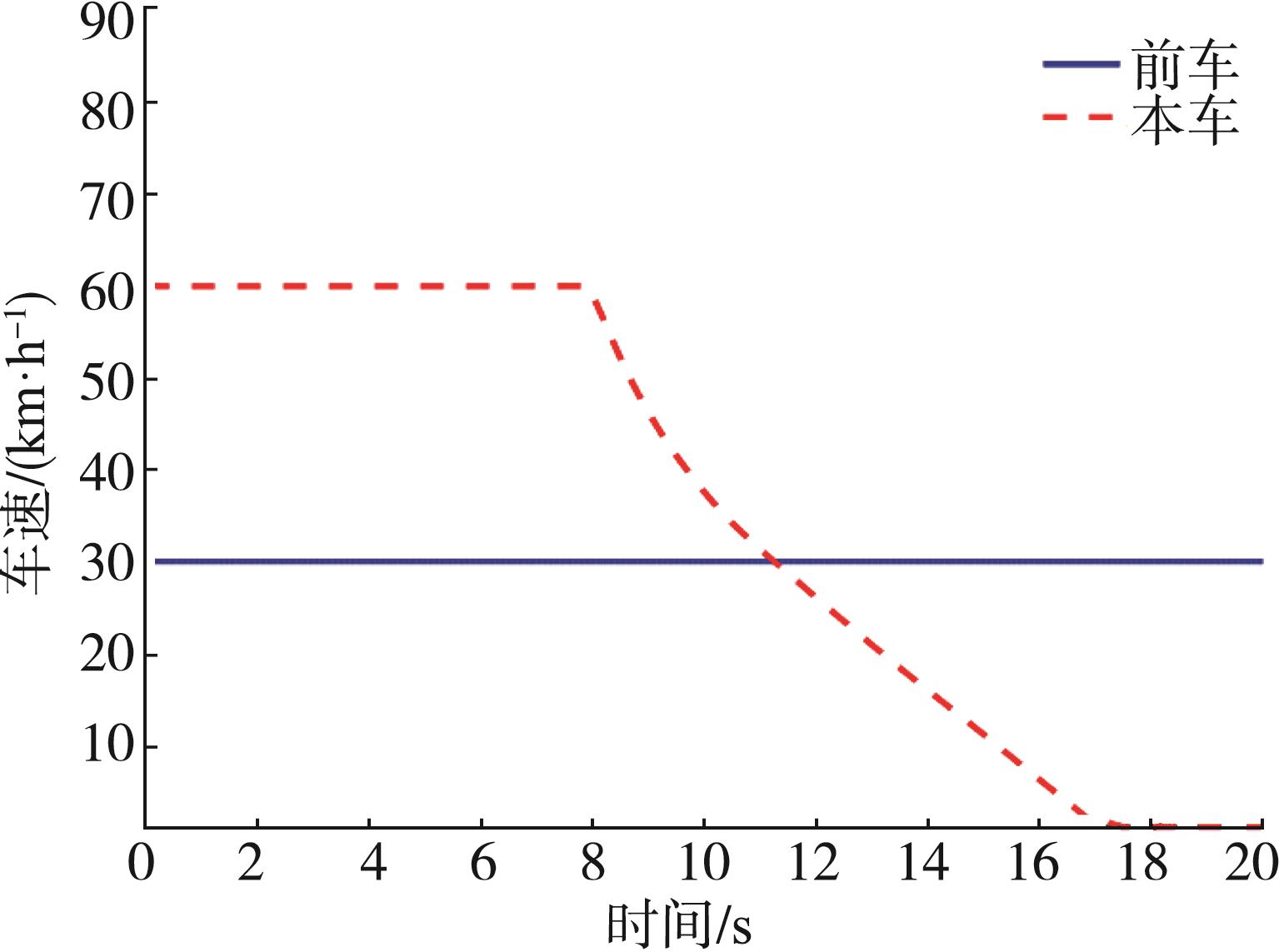
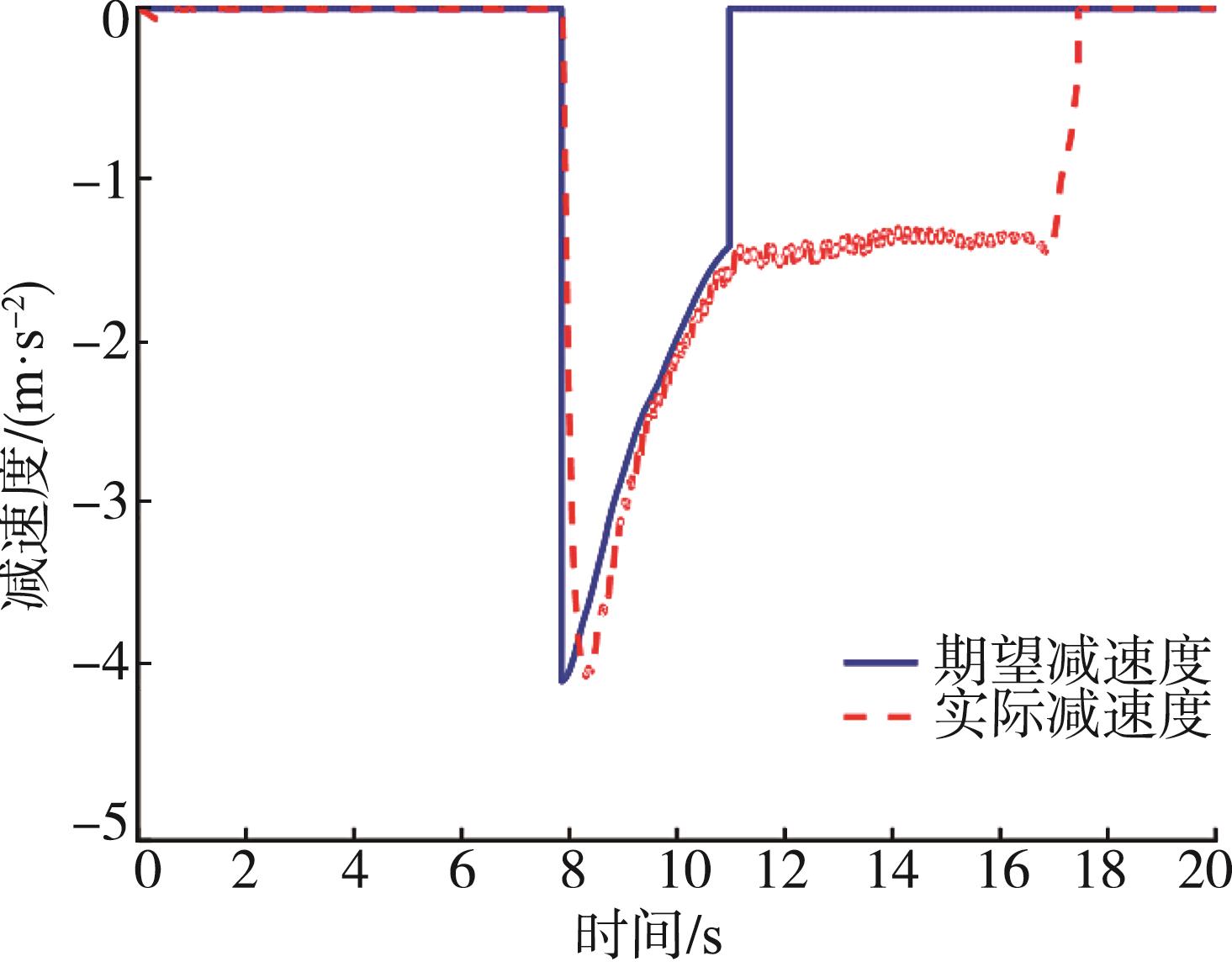
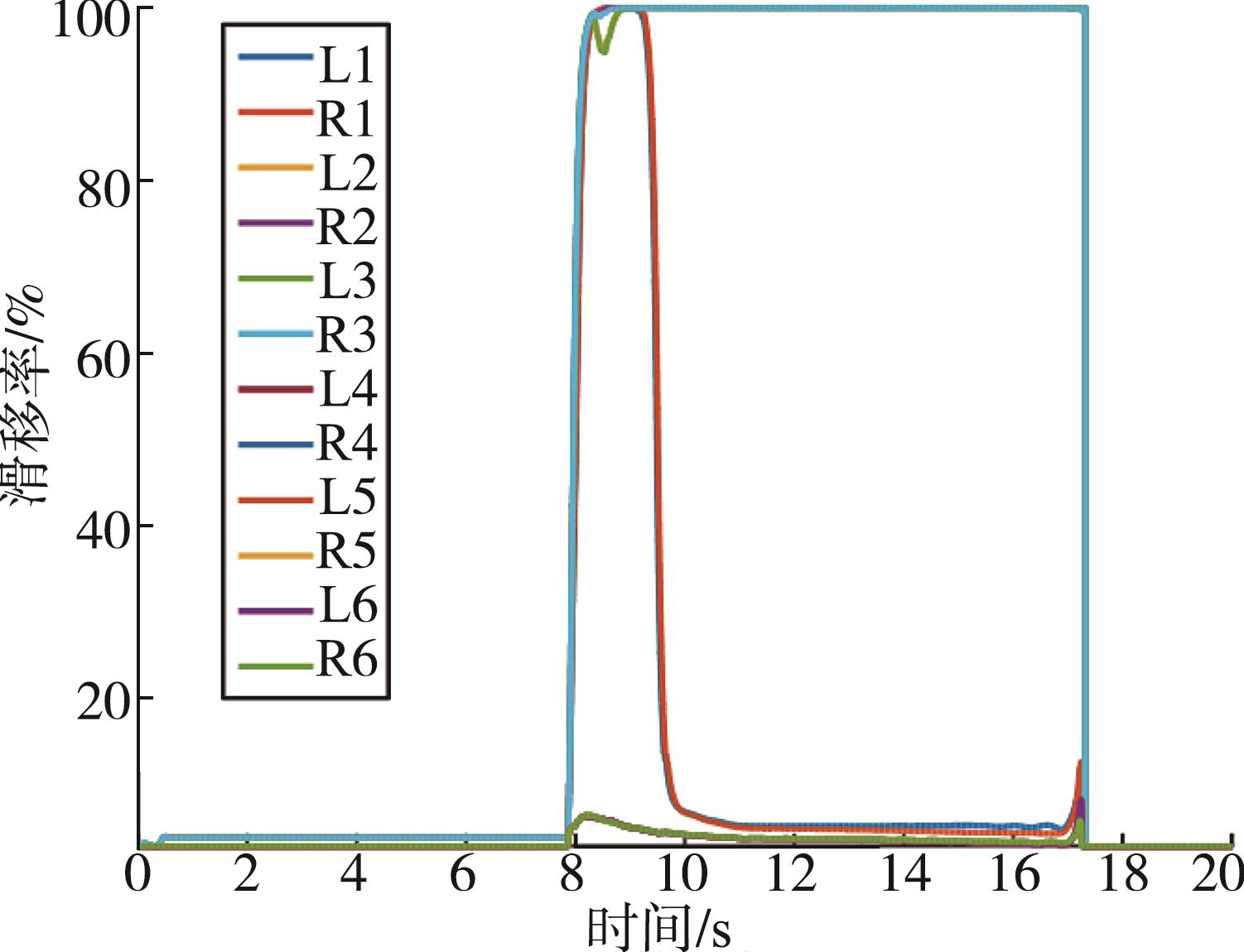
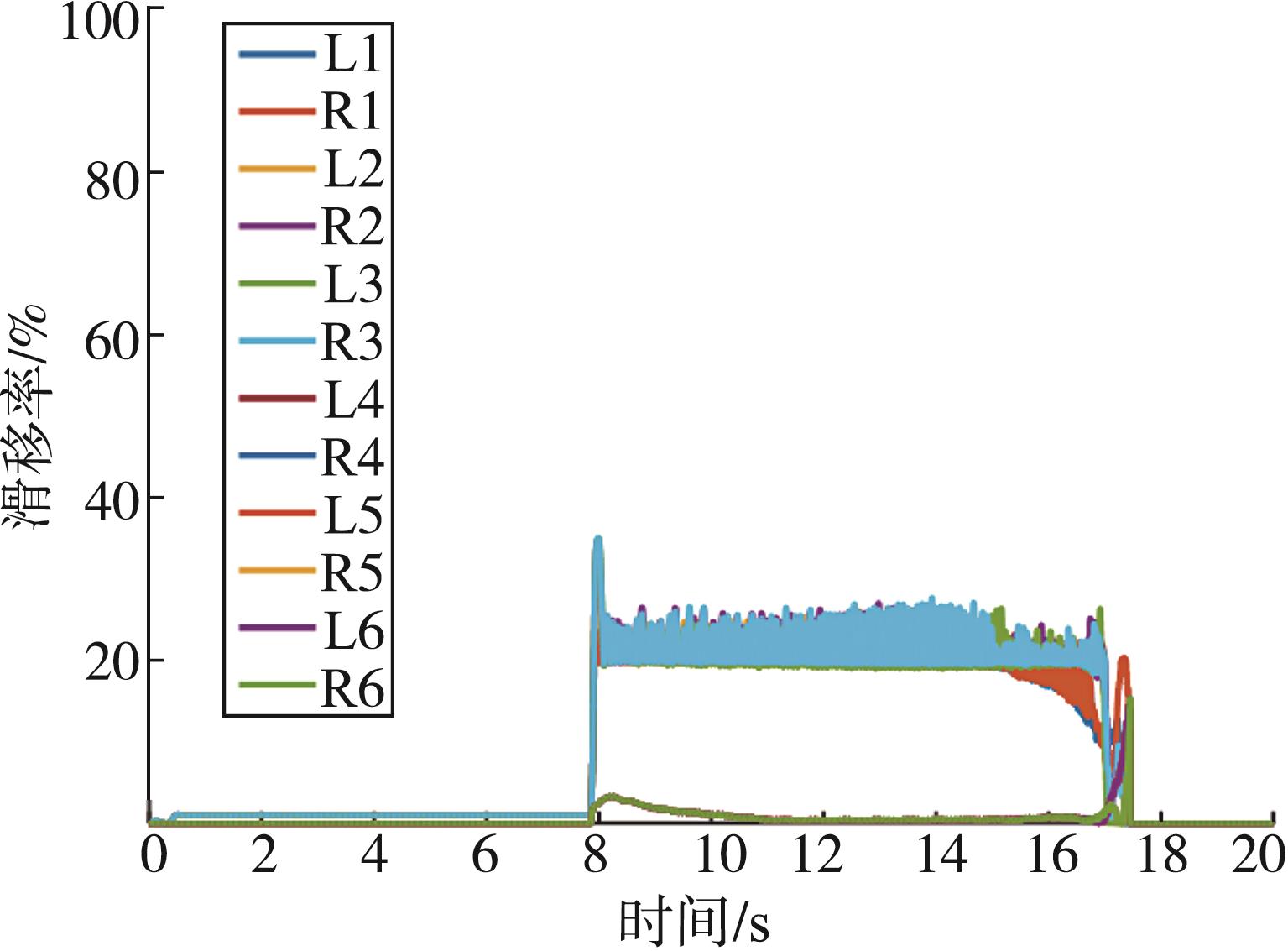
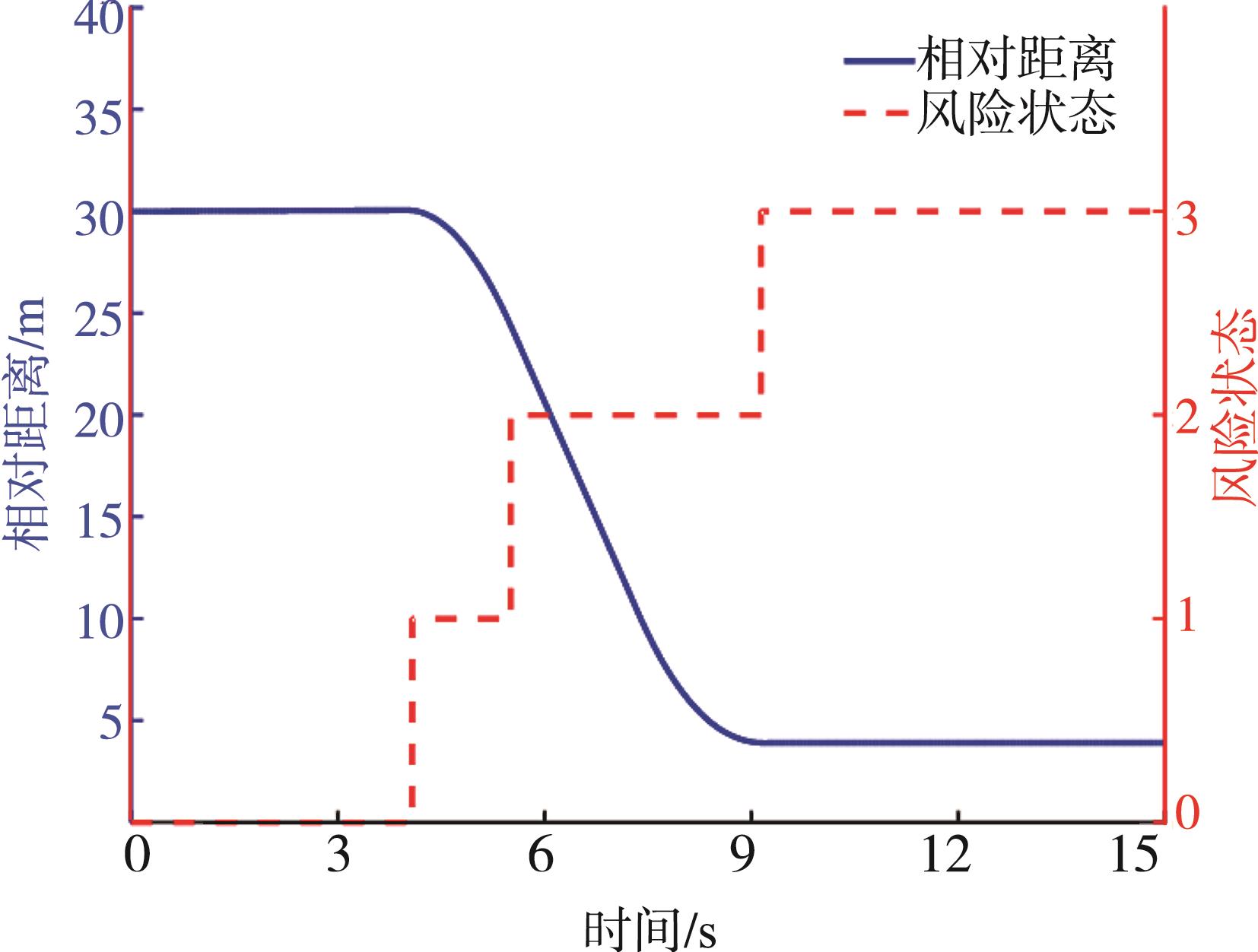
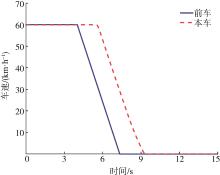
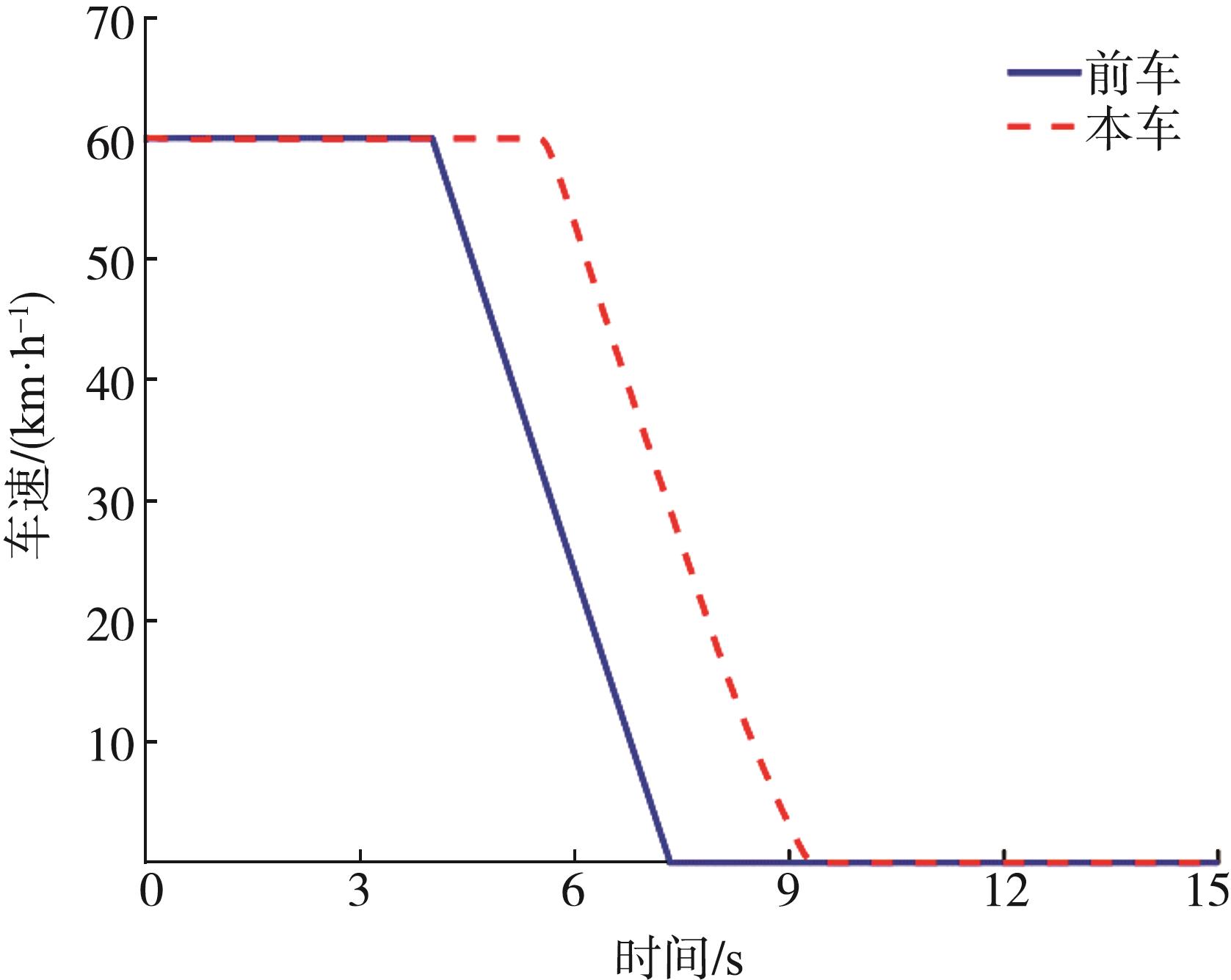
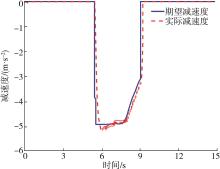
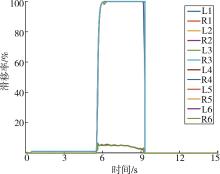
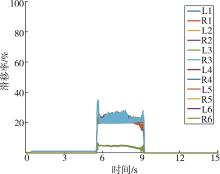
我国商用车AEB性能要求和试验方法标准的发布,推动了AEB在商用车领域的发展与应用。本文针对半挂汽车列车制动距离长、质心高等特点,结合驾驶员紧急制动的经验,提出了一种基于BP神经网络预测碰撞时间TTC的AEB控制策略。首先,设计了上层控制器,基于不同驾驶员在不同紧急制动场景下碰撞时间的数据,利用BP神经网络算法得到预测模型,从而计算出触发AEB系统的预警时间阈值和紧急制动时间阈值;再以前车与本车的相对距离、相对速度和前车的减速度为输入,通过模糊控制规则得到本车期望的减速度;接着,设计了下层控制器,采用期望减速度前馈控制和减速度偏差PID反馈控制相结合的方式,得到各车轮所需的轮缸制动压力;并基于滑移率滑模控制防止车轮抱死,提高紧急制动时的安全性、舒适性和横摆稳定性。最后,在TruckSim中建立CCRb、CCRm、CCRs 3种测试场景,对控制策略进行了验证。结果表明,本文所提出的控制策略能有效避免碰撞的发生,为半挂汽车列车AEB系统的设计和研究提供了理论依据。