汽车工程 ›› 2022, Vol. 44 ›› Issue (1): 8-16.doi: 10.19562/j.chinasae.qcgc.2022.01.002
所属专题: 智能网联汽车技术专题-规划&控制2022年
赵健,杜金朋,朱冰( ),王志伟,陈志成,陶晓文
),王志伟,陈志成,陶晓文
Jian Zhao,Jinpeng Du,Bing Zhu(),Zhiwei Wang,Zhicheng Chen,Xiaowen Tao
摘要:
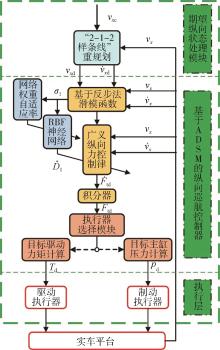
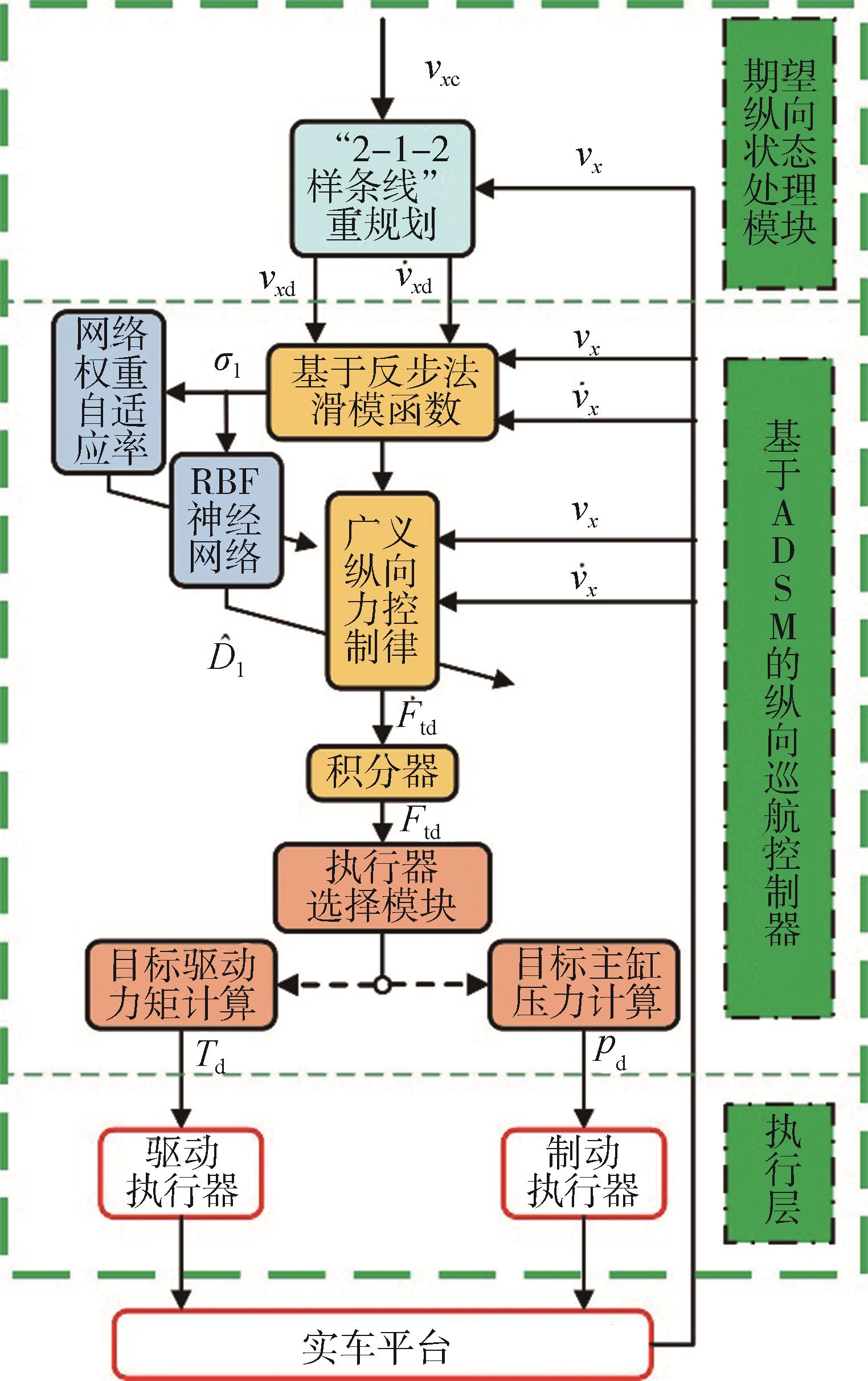
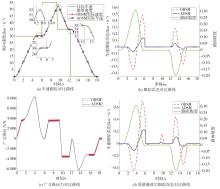
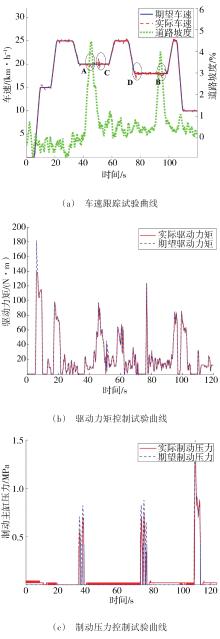
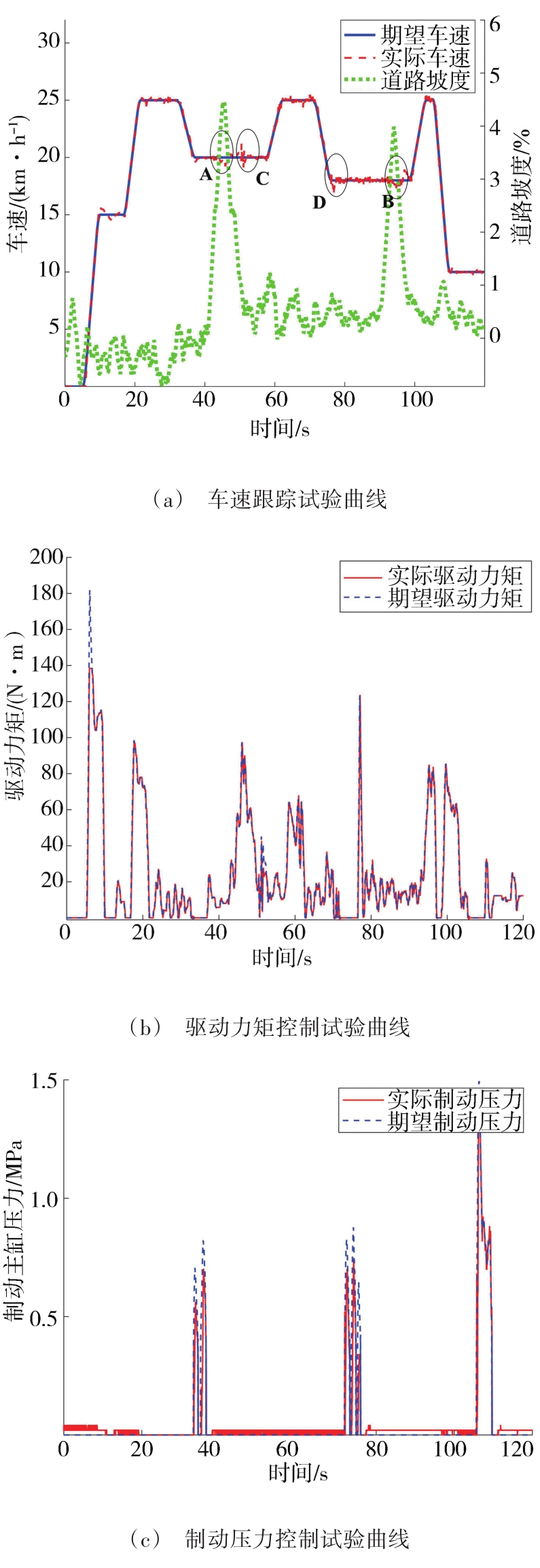
为消除参数不确定性和外部干扰等因素对智能汽车纵向巡航控制的影响,提出一种基于自适应动态滑模的纵向巡航控制方法。建立以广义纵向力导数项为控制输入的车辆纵向动力学模型,基于反步法构建保证车速与纵向加速度同时收敛于期望值的新型滑模函数;在此基础上,设计了期望广义纵向力的动态滑模控制律,并利用RBF神经网络对控制律中的未知干扰量进行自适应补偿;设计执行器选择模块将期望广义纵向力转换为执行层期望控制输入;进行仿真对比与实车测试,结果表明,所提出的智能汽车纵向巡航控制方法能有效地消除参数不确定性和外部干扰的影响,改善了传统滑模控制的抖振现象,实现对期望巡航车速的稳定准确跟踪。