汽车工程 ›› 2021, Vol. 43 ›› Issue (8): 1168-1176.doi: 10.19562/j.chinasae.qcgc.2021.08.007
兰凤崇1,李诗成1,陈吉清1( ),沈宗卯2
),沈宗卯2
收稿日期:2021-03-22
修回日期:2021-04-28
出版日期:2021-08-25
发布日期:2021-08-20
通讯作者:
陈吉清
E-mail:chenjq@scut.edu.cn
基金资助:
Fengchong Lan1,Shicheng Li1,Jiqing Chen1(),Zongmao Shen2
Received:2021-03-22
Revised:2021-04-28
Online:2021-08-25
Published:2021-08-20
Contact:
Jiqing Chen
E-mail:chenjq@scut.edu.cn
摘要:
针对自动驾驶车辆轨迹规划控制算法无法满足乘员个性化舒适性问题,结合自然驾驶数据和乘员乘坐舒适性需求,建立乘员个性化舒适性辨识方法。首先确定主观舒适性评价方式,基于标准ISO2631搭建频域和时域加权滤波函数,提取自动驾驶汽车乘员舒适性主客观特征参数,辨识乘员个性化舒适性与自动驾驶车辆行驶规划参数关系;随后搭建自然驾驶数采平台,采集影响舒适性的行驶参数和主客观参数;利用因子分析对行驶参数降维,得到三向运动(横向冲击、纵向加速、垂向振动)、行驶风险和效率影响因子;最后运用加权分析方法辨识模型,并通过卡尔曼滤波算法快速准确识别乘员个性化需求,得到舒适度加权方均根阈值。辨识结果表明:乘员主客观舒适度相关性达85.8%;三向运动因子对乘员舒适性影响大于行驶风险和效率因子;乘员个性化舒适性辨识率高达93.9%。本研究可为搭建考虑乘员舒适性的个性化轨迹规划控制算法提供理论支持。
兰凤崇,李诗成,陈吉清,沈宗卯. 自动驾驶汽车乘员个性化乘坐舒适性辨识方法[J]. 汽车工程, 2021, 43(8): 1168-1176.
Fengchong Lan,Shicheng Li,Jiqing Chen,Zongmao Shen. Identification Method for Occupant Personalized Ride Comfort of Autonomous Vehicles[J]. Automotive Engineering, 2021, 43(8): 1168-1176.
表1
驾驶员驾驶主观舒适性评价方法"
| 可接受度 | 不可接受 | 临界 | 可接受 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 主观感受 | 极差 | 剧烈 | 差 | 较差 | 临界 | 一般 | 好 | 较好 | 极好 | 完美 |
| 分数 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |

图 1
考虑乘员舒适性的轨迹规划辨识方案"
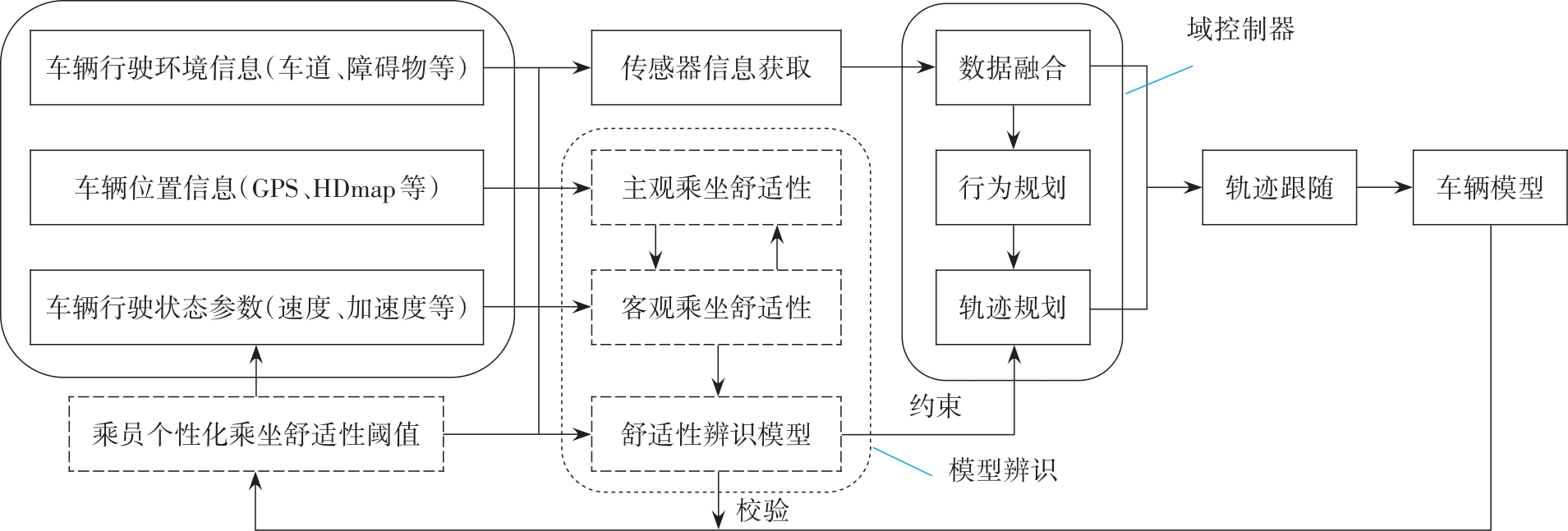

图 2
数据采集平台"
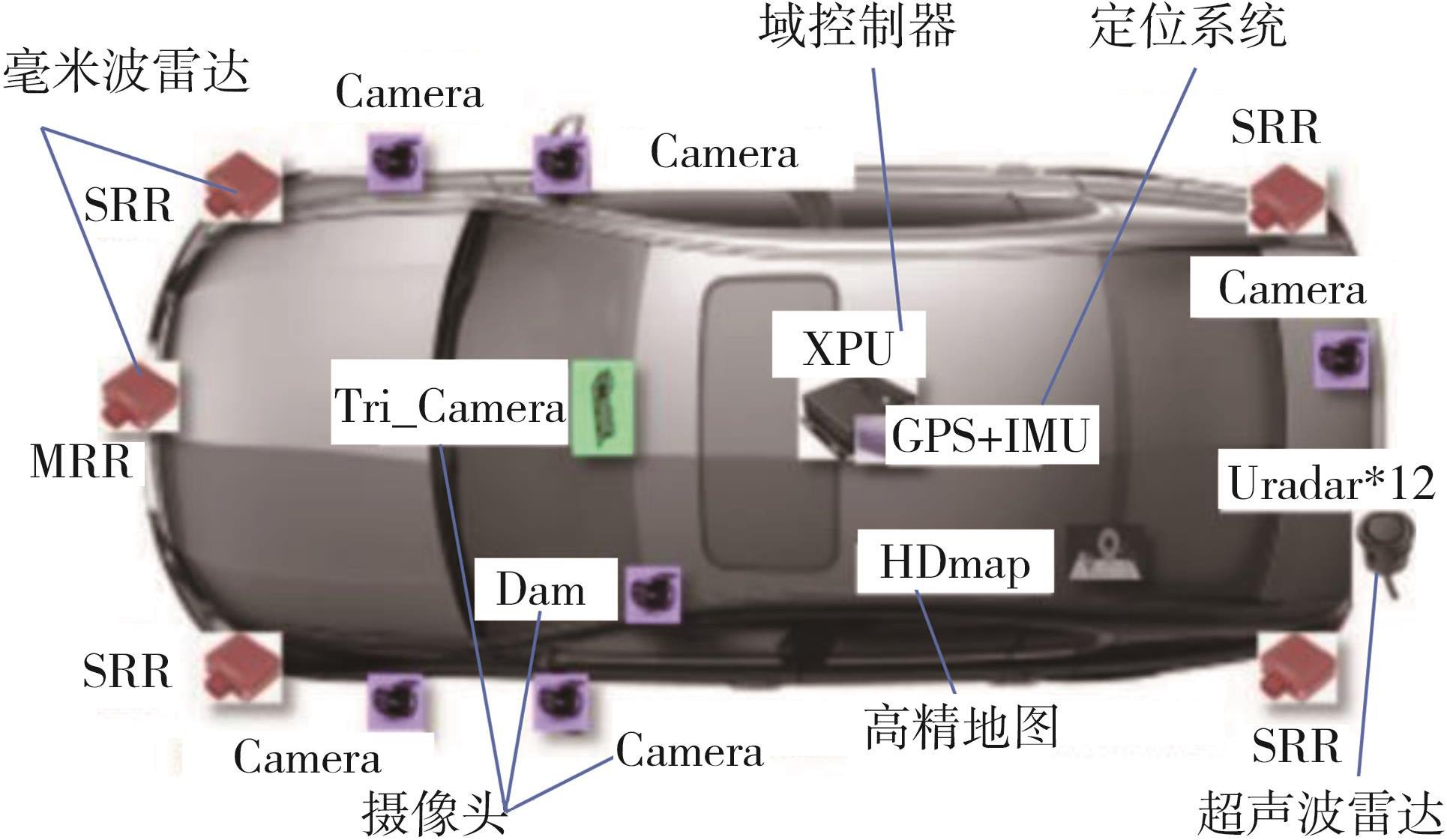
图 3
纵向参数标定"
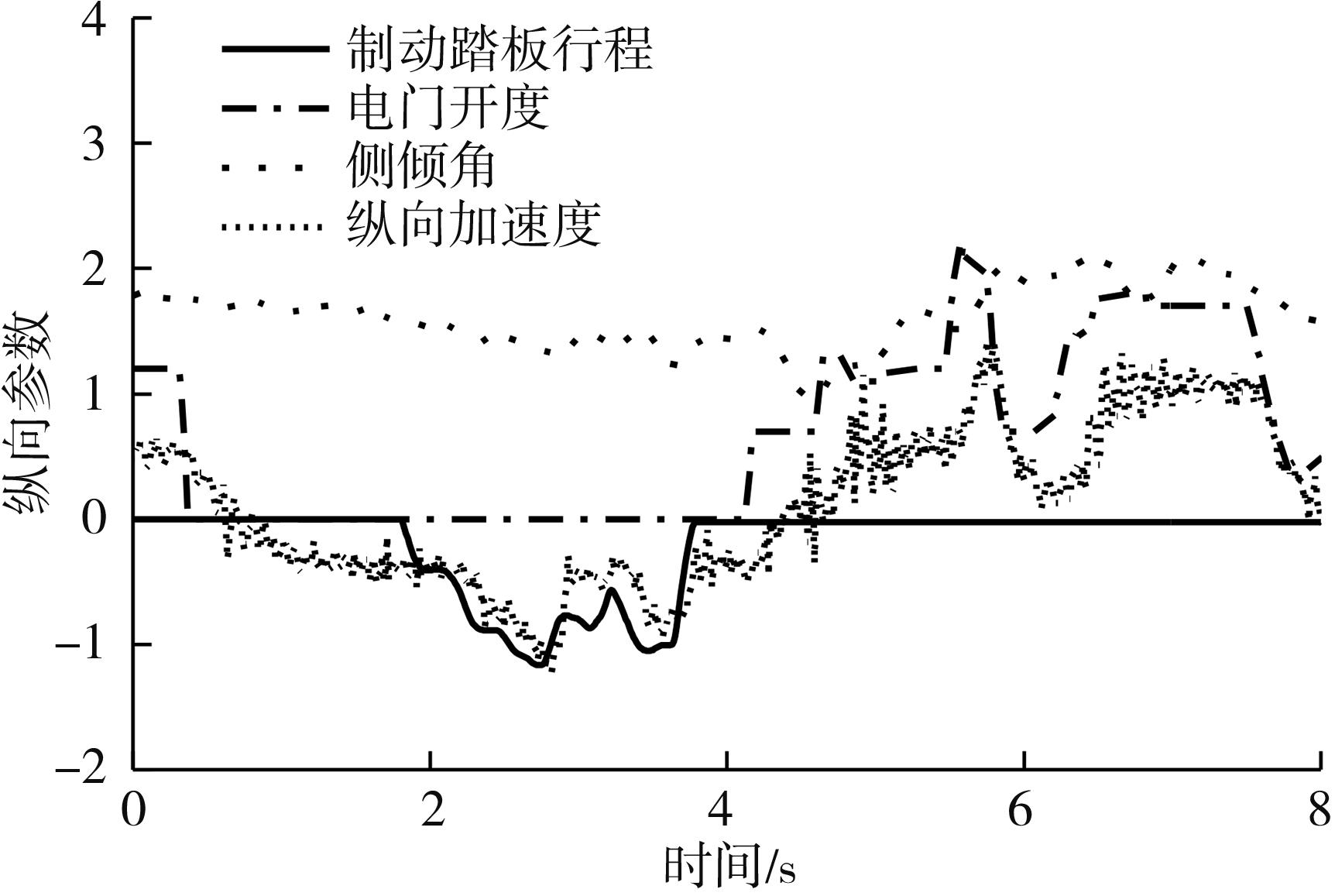
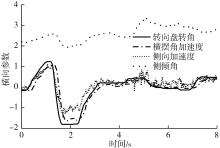
图 4
横向参数标定"
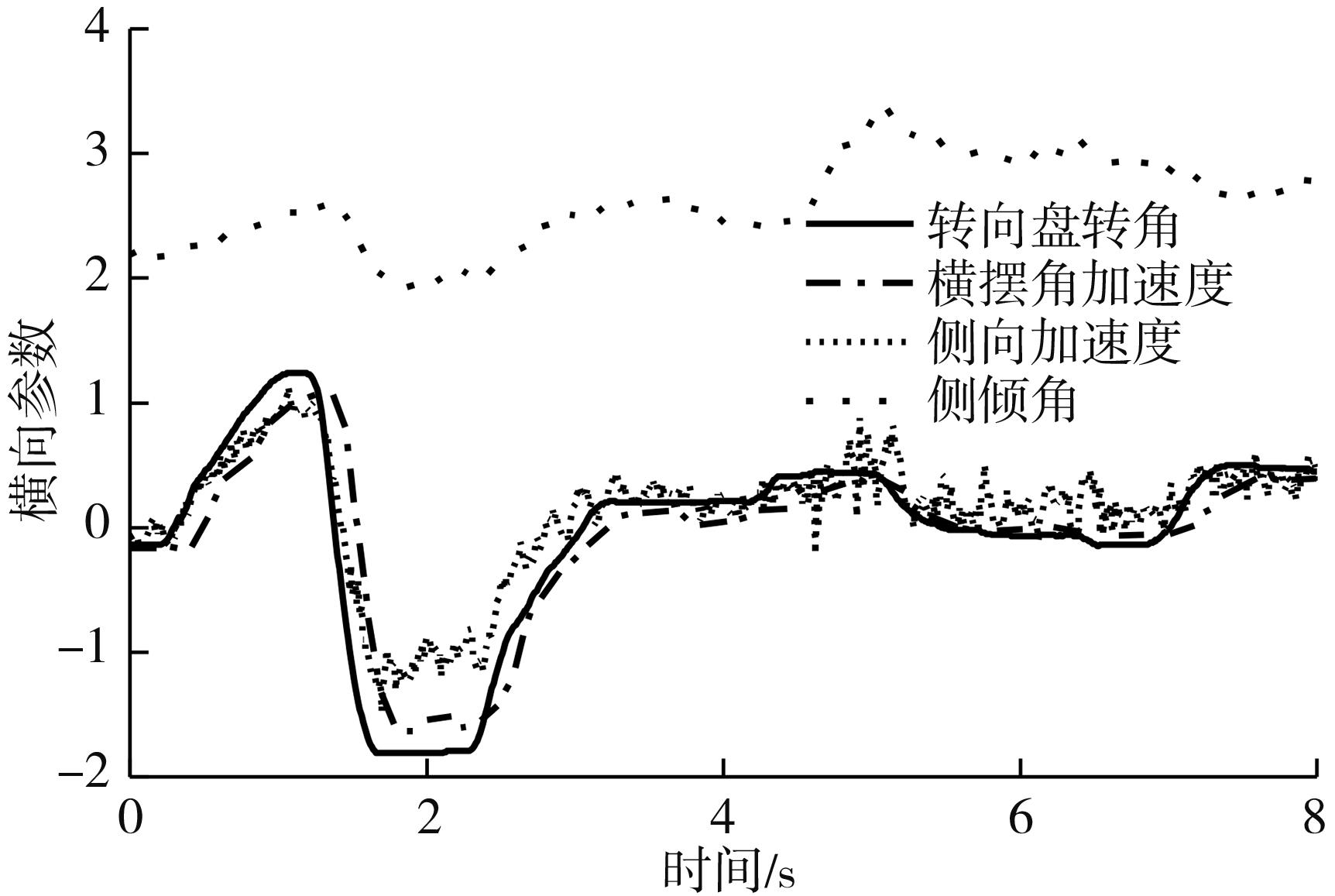
表2
频域时域加速度加权均方根"
| 编号 | 时域加权 | 频域加权 | 编号 | 时域加权 | 频域加权 |
|---|---|---|---|---|---|
| 1 | 0.268 | 0.269 | 6 | 0.269 | 0.260 |
| 2 | 0.577 | 0.615 | 7 | 0.303 | 0.323 |
| 3 | 1.309 | 1.103 | 8 | 0.278 | 0.261 |
| 4 | 0.508 | 0.546 | 9 | 0.391 | 0.425 |
| 5 | 0.853 | 0.779 | 10 | 0.422 | 0.403 |
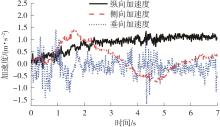
图 5
横纵向和垂向加速度"
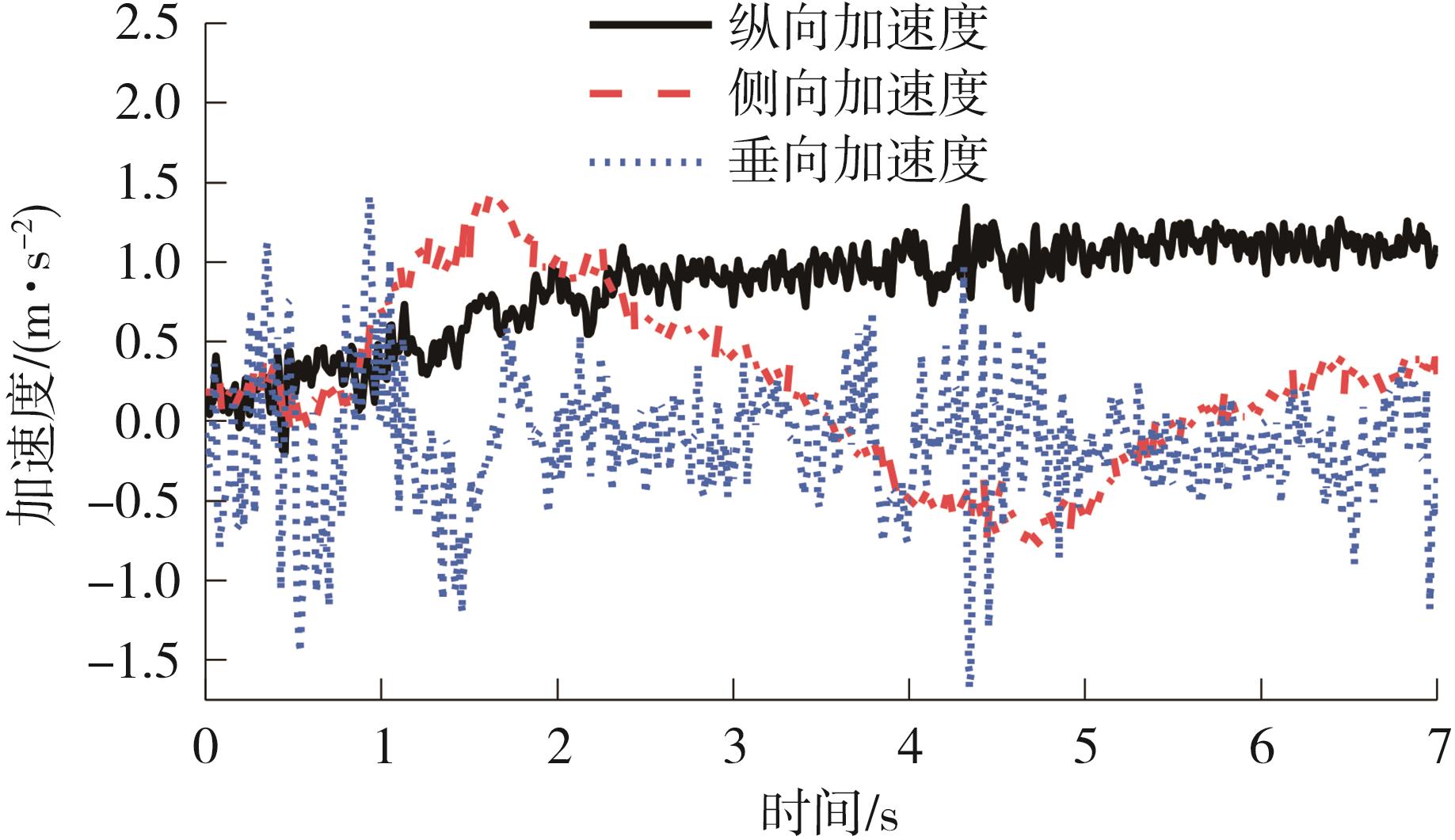
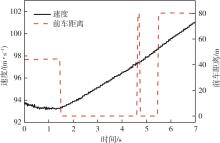
图 6
换道速度与前车距离"
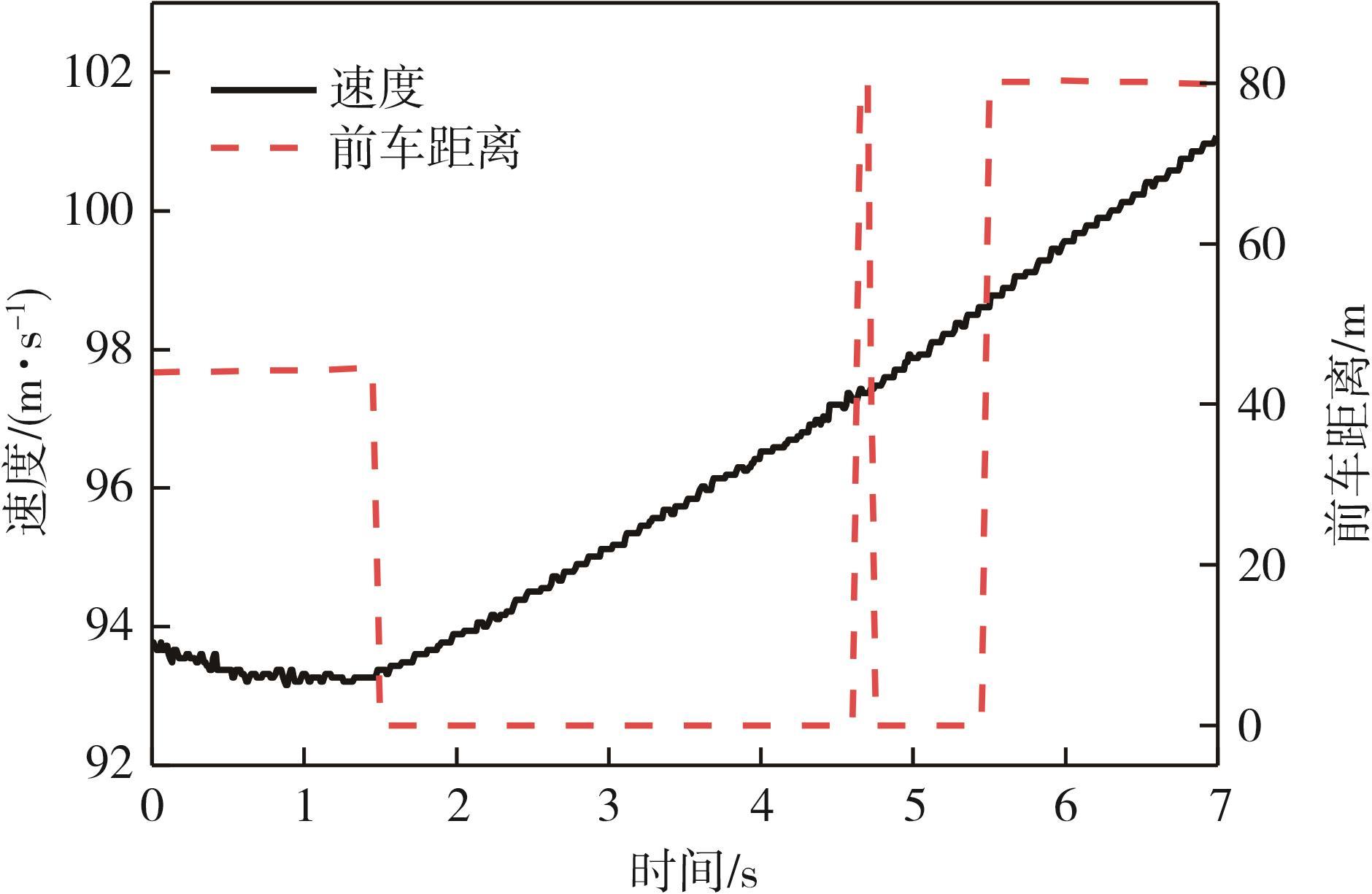
图 7
转向盘转角变化信息"
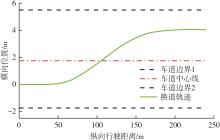
图 8
车辆换道轨迹"

表 3
换道过程参数"
| 编号 | 参数名称 | 编号 | 参数名称 |
|---|---|---|---|
| 1 | 换道时间 | 10 | 横向加速度绝对值平均值 |
| 2 | 换道速度 | 11 | 横向加速度标准差 |
| 3 | 换道纵向行驶距离 | 12 | 横向冲击绝对值最大值 |
| 4 | 换道横向距离 | 13 | 横向冲击绝对值平均值 |
| 5 | 纵向加速度绝对值最大值 | 14 | 垂向加速度最大值 |
| 6 | 纵向加速度平均值 | 15 | 垂向加速度最小值绝对值 |
| 7 | 纵向加速度标准差 | 16 | 垂向加速度绝对值平均值 |
| 8 | 横向加速度最大值 | 17 | 垂向加速度标准差 |
| 9 | 横向加速度最小值的绝对值 | 18 | 主车与前车距离 |
表 4
KMO和巴特利特检验"
| KMO取样适切性量数 | 0.756 1 | |
|---|---|---|
| 巴特利特球形度检验 | 近似卡方 | 6 259.130 |
| 自由度 | 153 | |
| 显著性 | 0.00 | |
表 5
总方差解释"
参数 编号 | 初始特征值 | 参数 编号 | 初始特征值 | ||||
|---|---|---|---|---|---|---|---|
| 特征根 | 方差 贡献/% | 累积 贡献/% | 特征根 | 方差 贡献/% | 累积 贡献/% | ||
| 1 | 5.588 | 31.047 | 31.047 | 10 | 0.272 | 1.511 | 96.109 |
| 2 | 3.791 | 21.064 | 52.111 | 11 | 0.249 | 1.385 | 97.495 |
| 3 | 2.467 | 13.707 | 65.818 | 12 | 0.175 | 0.970 | 98.464 |
| 4 | 1.659 | 9.218 | 75.036 | 13 | 0.118 | 0.656 | 99.121 |
| 5 | 1.006 | 5.590 | 80.626 | 14 | 0.061 | 0.340 | 99.460 |
| 6 | 0.895 | 4.971 | 85.597 | 15 | 0.041 | 0.226 | 99.686 |
| 7 | 0.799 | 4.440 | 90.037 | 16 | 0.026 | 0.144 | 99.830 |
| 8 | 0.475 | 2.640 | 92.677 | 17 | 0.016 | 0.090 | 99.921 |
| 9 | 0.346 | 1.921 | 94.599 | 18 | 0.014 | 0.079 | 100.000 |
表 6
因子载荷旋转"
参数 编号 | 行驶车辆状态参数公共因子 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 1 | -0.579 | 0.045 | -0.016 | -0.147 | 0.488 |
| 2 | 0.084 | 0.298 | -0.162 | 0.750 | 0.293 |
| 3 | -0.310 | 0.280 | -0.152 | 0.572 | 0.554 |
| 4 | 0.088 | -0.013 | -0.033 | 0.070 | 0.807 |
| 5 | 0.072 | 0.077 | 0.975 | -0.025 | -0.015 |
| 6 | 0.113 | -0.093 | 0.875 | 0.161 | -0.125 |
| 7 | 0.103 | 0.039 | 0.858 | -0.212 | 0.031 |
| 8 | 0.766 | 0.097 | 0.147 | 0.189 | 0.035 |
| 9 | 0.834 | 0.153 | 0.042 | -0.175 | 0.047 |
| 10 | 0.928 | -0.036 | 0.031 | 0.181 | -0.012 |
| 11 | 0.971 | -0.007 | 0.063 | 0.096 | -0.036 |
| 12 | 0.874 | 0.034 | 0.089 | -0.079 | -0.012 |
| 13 | 0.967 | -0.016 | 0.058 | 0.057 | -0.048 |
| 14 | -0.026 | 0.926 | -0.048 | -0.089 | 0.026 |
| 15 | 0.026 | 0.874 | 0.017 | -0.011 | 0.052 |
| 16 | 0.132 | 0.877 | 0.094 | 0.308 | 0.011 |
| 17 | 0.046 | 0.973 | -0.016 | 0.079 | 0.013 |
| 18 | 0.191 | -0.082 | 0.072 | 0.729 | -0.127 |
表 7
贡献率和加权系数"
| 因子编号 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 旋转因子贡献率 | 0.295 4 | 0.198 1 | 0.142 1 | 0.097 0 | 0.073 6 |
| 加权系数 | 0.366 4 | 0.245 7 | 0.176 2 | 0.120 3 | 0.091 3 |
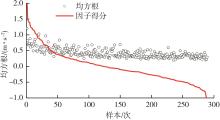
图 9
Tscore和aw得分"
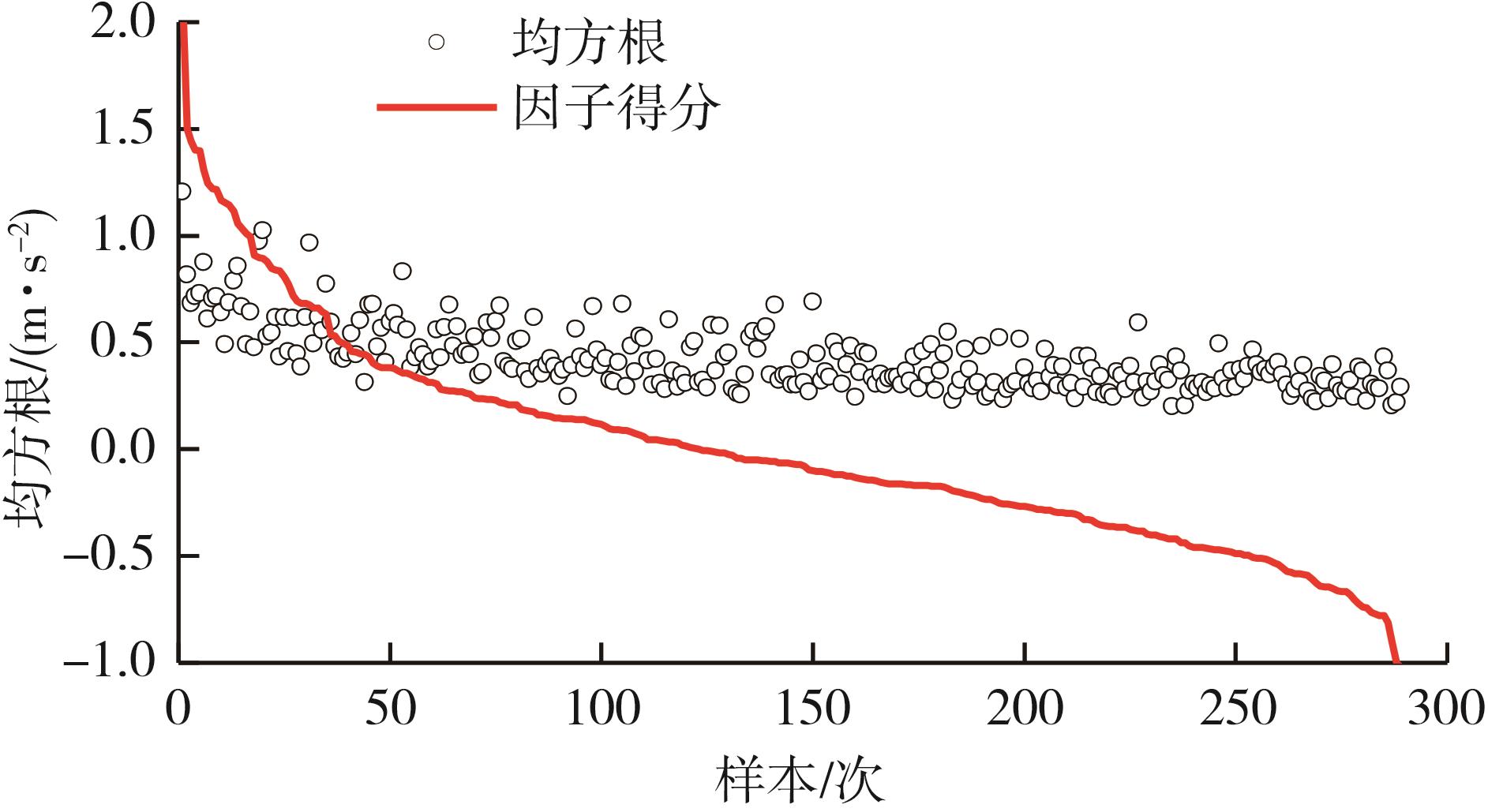
表 8
非线性拟合回归系数估计值"
| 系数 | k1 | k2 | k3 | k4 | k5 | k6 |
|---|---|---|---|---|---|---|
| 数值 | 0.080 7 | 0.098 4 | 0.034 5 | -0.028 3 | -0.001 3 | 0.422 9 |
| 加权 | 0.331 8 | 0.404 6 | 0.141 9 | 0.116 4 | 0.005 3 |
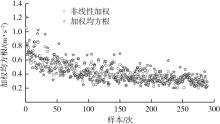
图 10
多元非线性加权ap和aw"
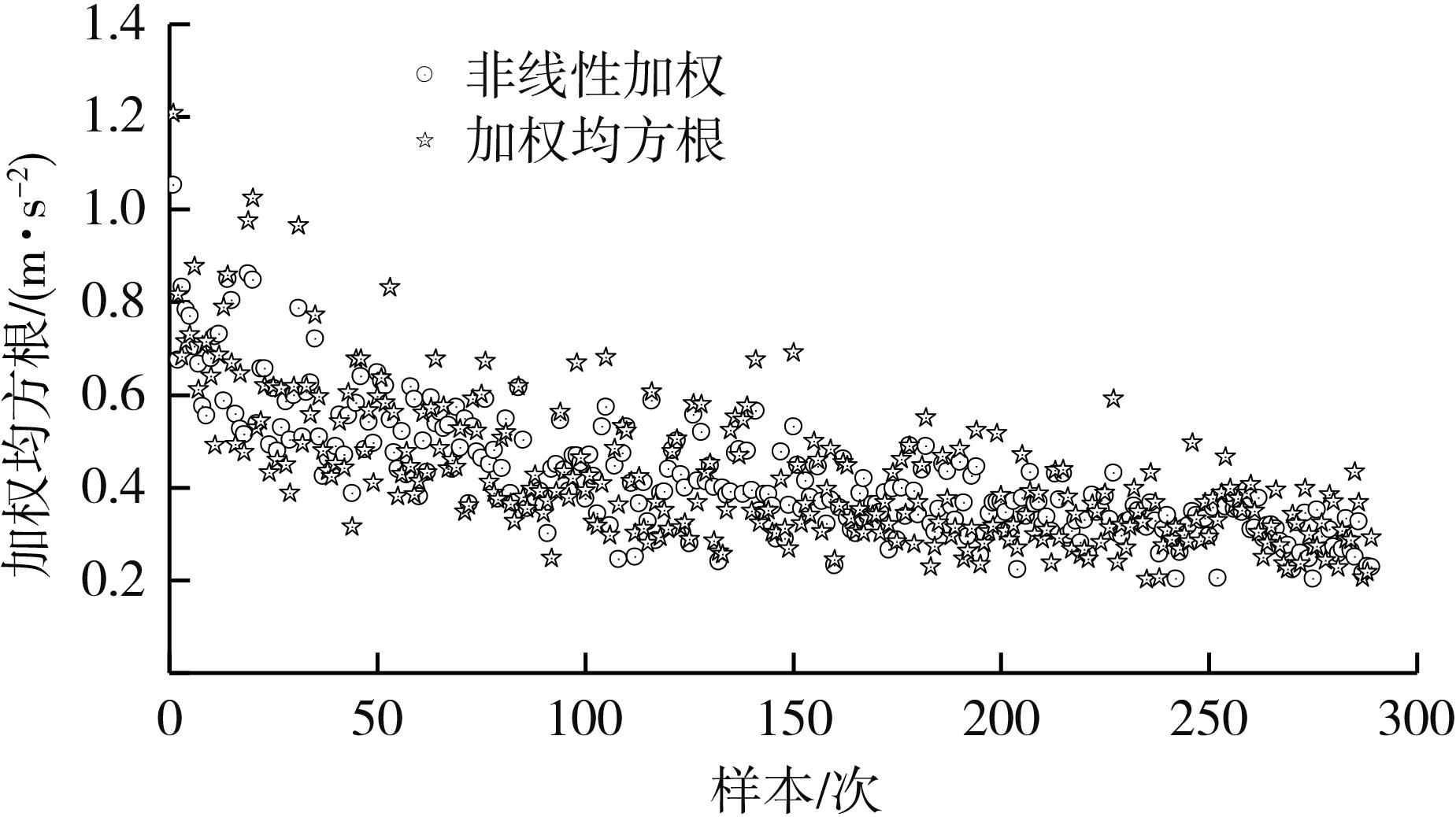
图 11
神经网络输出anet和aw"
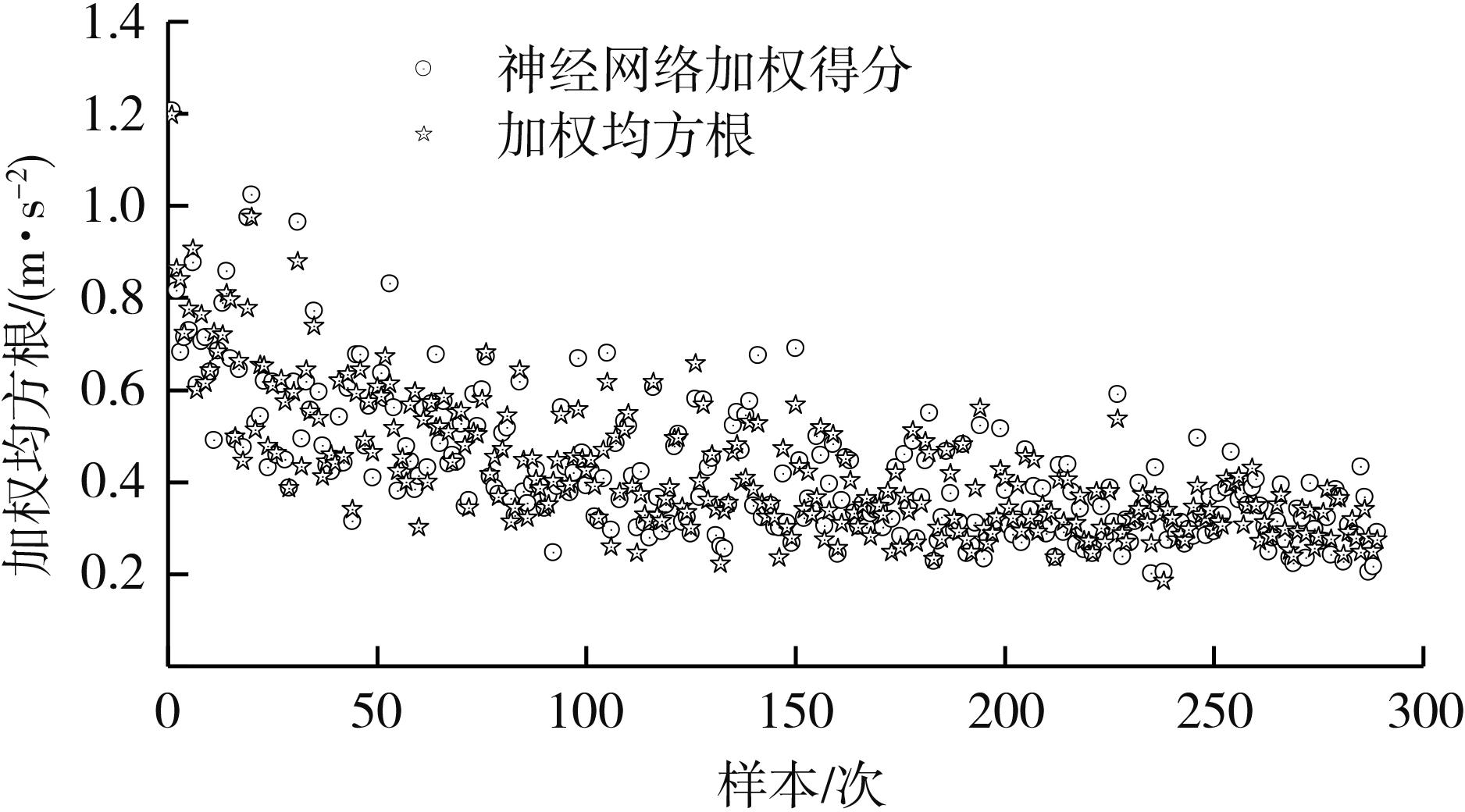
图 12
多元非线性加权与神经网络加权误差"
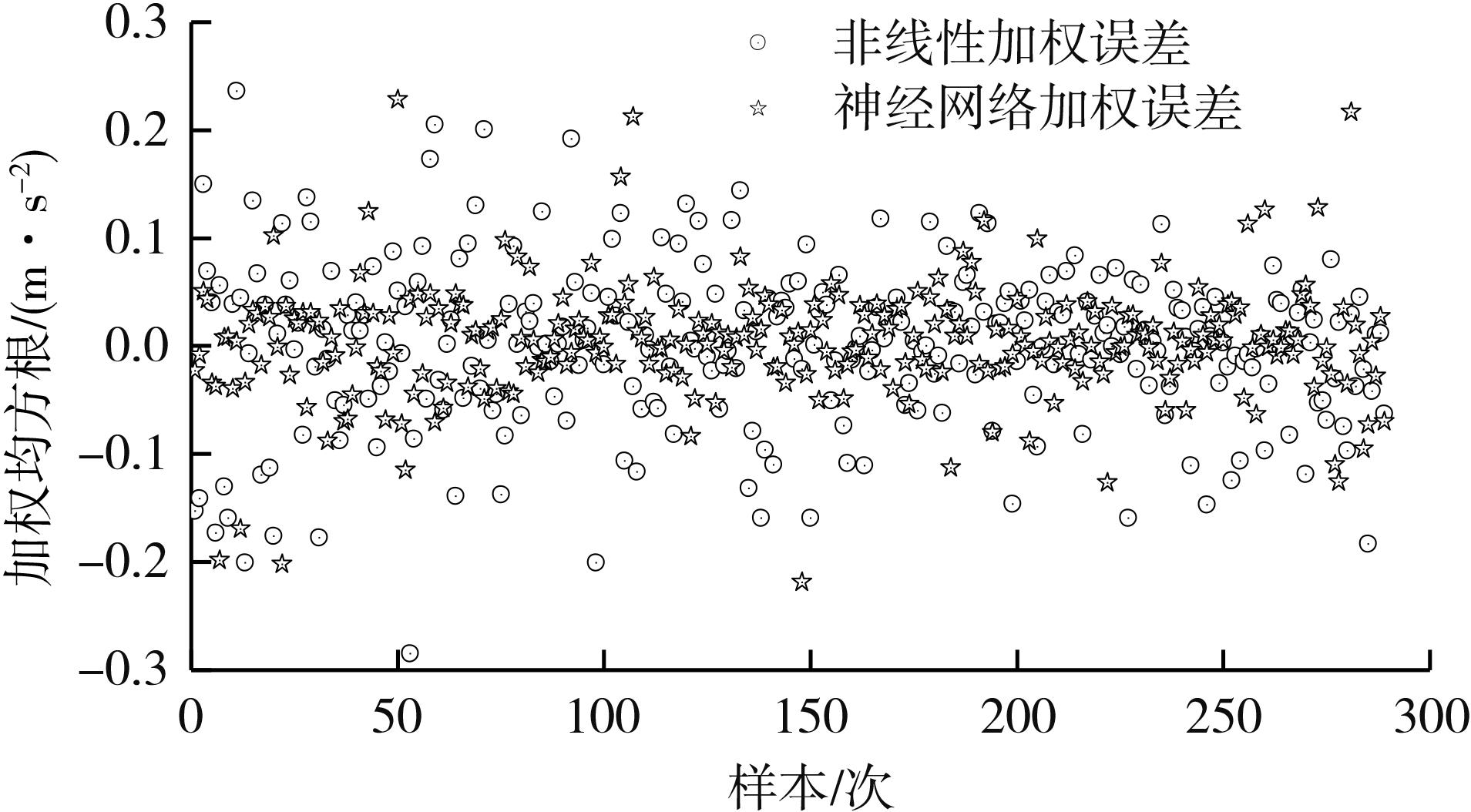
图 13
换道得分as1和aw"
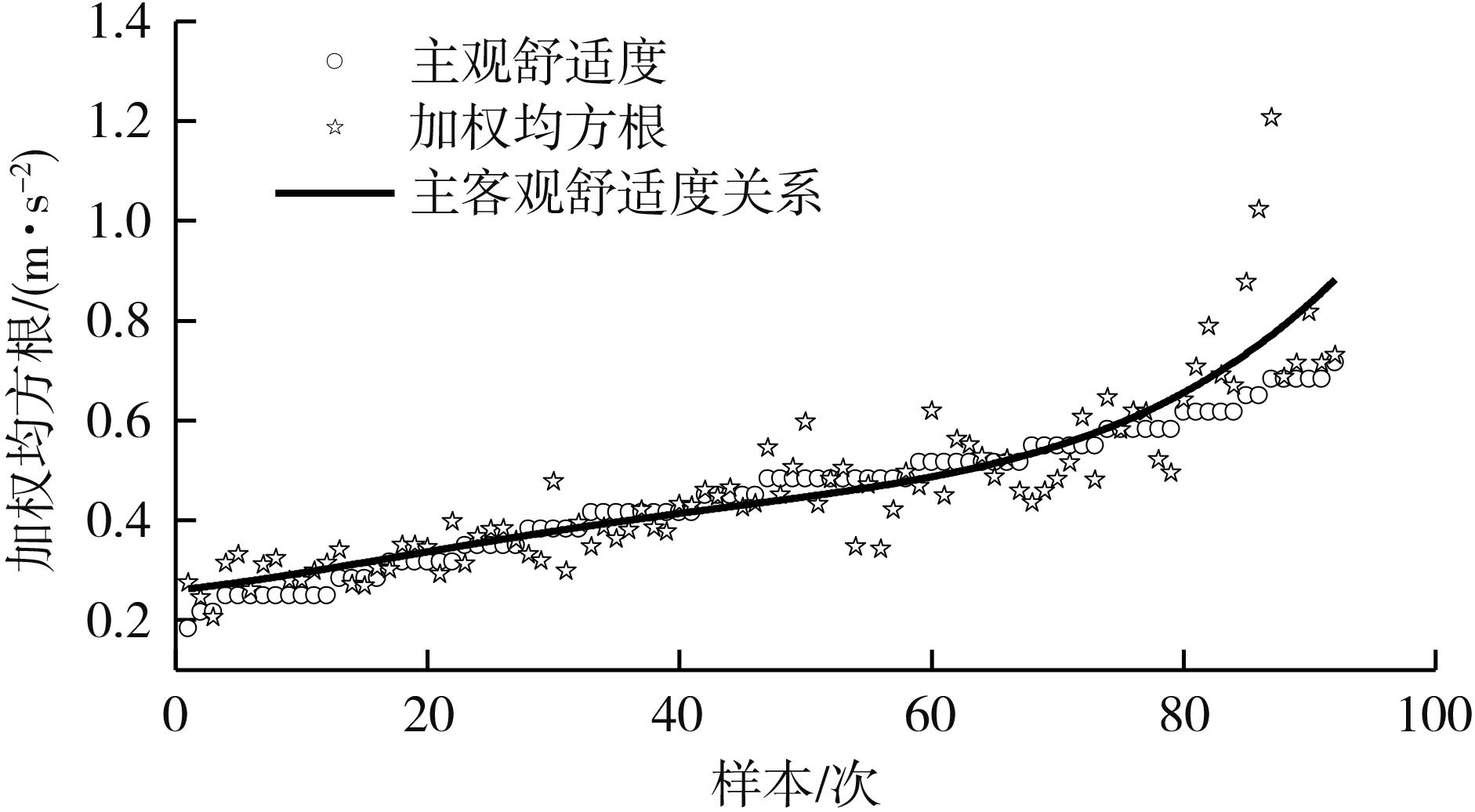
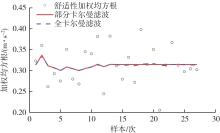
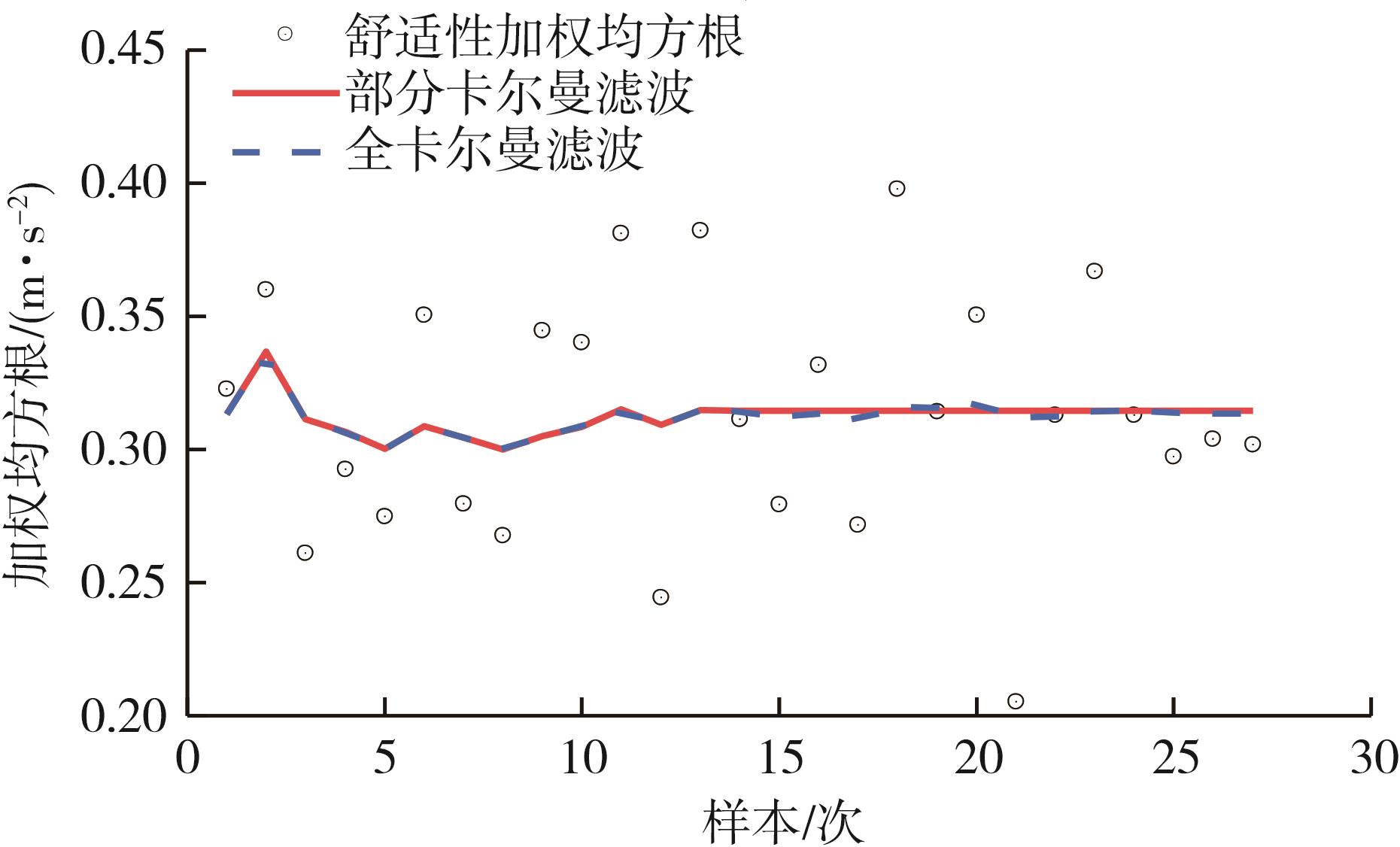
图 14
卡尔曼滤波乘员舒适性识别"
| 1 | BIMBRAW K. Autonomous cars: past, present and future a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology[C]. IEEE, 2015. |
| 2 | GONZÁLEZ D, PÉREZ J, MILANÉS V, et al. A review of motion planning techniques for automated vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4):1135-1145. |
| 3 | CHEN L, QIN D, XU X, et al. A path and velocity planning method for lane changing collision avoidance of intelligent vehicle based on cubic 3⁃D Bezier curve [J]. Advances in Engineering Software, 2019, 132(JUN.):65-73. |
| 4 | HU X, LONG C, BO T, et al. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles [J]. Mechanical Systems and Signal Processing, 2018, 100(FEB.1):482-500. |
| 5 | 宋晓琳,周南,黄正瑜,等.改进RRT在汽车避障局部路径规划中的应用[J].湖南大学学报(自然科学版), 2017,44(4):30-37. |
| SONG X L, ZHOU N, HUANG Z Y, et al. An improved RRT algorithm of local path planning for vehicle collision avoidance [J]. Journal of Hunan University (Natural Sciences), 2017,44(4):30-37. | |
| 6 | 姚君延. 基于深度增强学习的路径规划算法研究 [D]. 成都:电子科技大学, 2018. |
| YAO J Y. Research of path planning algorithms based on deep reinforcement learning [D]. Chengdu: University of Electronic Science and Technology of China, 2018. | |
| 7 | MAVROGIANNIS C I, BLUKIS V, KNEPPER R A. Socially competent navigation planning by deep learning of multi⁃agent path topologies [C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017. |
| 8 | 王天舸. 智能驾驶汽车运动规划与运动控制方法研究[D].长春:吉林大学, 2019. |
| WANG T G. Study on motion plan and motion control method of intelligent driving vehicle[D]. Changchun: Jilin University, 2019. | |
| 9 | SCHOCKENHOFF F, NEHSE H, LIENKAMP M. Maneuver⁃based objectification of user comfort affecting aspects of driving style of autonomous vehicle concepts [J]. Applied Sciences, 2020, 10(11):3946. |
| 10 | 刘帅. 基于安全场的智能汽车个性化换道决策与规划算法研究 [D]. 长春:吉林大学, 2019. |
| LIU S. A personalized lane⁃changing decision⁃making and trajectory⁃planning method based on safety field for intelligent vehicles[D]. Changchun: Jilin University, 2019. | |
| 11 | HU H, LU Z, WANG Q, et al. End⁃to⁃end automated lane⁃change maneuvering considering driving style using a deep deterministic policy gradient algorithm [J]. Sensors, 2020, 20(18):5443. |
| 12 | 闫淑德. 基于驾驶习性的智能汽车个性化换道辅助系统研究[D]. 长春:吉林大学,2019. |
| YAN S D. Research on the personalized lane⁃change assistance system with driving style identification [D]. Changchun: Jilin University,2019. | |
| 13 | MARJANEN Y, MANSFIELD N J. Relative contribution of translational and rotational vibration to discomfort [J]. Industrial Health, 2010, 48(5):519. |
| 14 | BURKHARD G, BERGER T, ENDERS E, et al. Objectifying ride comfort in autonomous driving-an extended model of the ISO-2631 standard to objectify the ride comfort of an inattentive occupant [C]. 2nd International Comfort Congress⁃ICC2019,2019. |
| 15 | SAE J1060. Subjective rating scale for evaluation of noise and ride comfort characteristics related to motor vehicle tires SAE recommended practice [S]. USA: SAE, 2000. |
| 16 | 杨大柱.MATLAB在IIR滤波器设计中的应用[J].现代机械,2006(5):60-61,82. |
| YANG D Z. Application of MATLAB in the design of IIR filter[J]. Modern Machinery, 2006(5):60-61,82. | |
| 17 | 宗长富,陈双,冯刚,等.基于频率加权滤波的汽车平顺性评价[J].吉林大学学报(工学版), 2011,41(6):517-521. |
| ZONG C F, CHEN S, FENG G, et al. Evaluation of vehicle ride comfort based on frequency weighted filtering [J]. Journal of Jilin University (Engineering and Technology Edition), 2011,41(6):517-521. | |
| 18 | 兰凤崇,李诗成,陈吉清,等.考虑操纵稳定性的自动驾驶汽车轨迹综合优化方法[J].湖南大学学报(自然科学版), 2019(10):36-45. |
| LAN F C, LI S C, CHEN J Q, et al. Comprehensive approach for trajectory optimization of autopilot vehicles considering handling stability [J]. Journal of Hunan University (Natural Sciences), 2019(10):36-45. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 赵彤航,王俊光,田蜀东,陈祥祯. 混合动力轿车热泵系统NVH控制技术研究[J]. 汽车工程, 2024, 46(2): 337-345. |
| [4] | 王军年, 程川泰, 高菲, 付铁军, 任金东. 共享汽车驾驶员适宜H点和座椅参数实验研究[J]. 汽车工程, 2024, 46(1): 39-49. |
| [5] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [6] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [7] | 白先旭,左瑜,李维汉,石琴,李楚照,赵树廉,陈炯. 自动紧急制动系统控制模块的SOTIF量化评价[J]. 汽车工程, 2023, 45(9): 1655-1665. |
| [8] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [9] | 冉巍,陈慧,杨佳鑫,西村要介,国朝鵬,尹又雨. 基于效用理论的运动规划奖励函数设计方法[J]. 汽车工程, 2023, 45(8): 1373-1382. |
| [10] | 朱冰,姜泓屹,赵健,韩嘉懿,刘彦辰. 智能网联汽车协同感知信任度动态计算与评价方法[J]. 汽车工程, 2023, 45(8): 1383-1391. |
| [11] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [12] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [13] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [14] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [15] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
|