汽车工程 ›› 2025, Vol. 47 ›› Issue (6): 1169-1176.doi: 10.19562/j.chinasae.qcgc.2025.06.015
• • 上一篇
孙鑫宇1,金立生1,2( ),霍震1,王欢欢1,贺阳1,2,刘栋3
),霍震1,王欢欢1,贺阳1,2,刘栋3
Xinyu Sun1,Lisheng Jin1,2(),Zhen Huo1,Huanhuan Wang1,Yang He1,2,Dong Liu3
摘要:
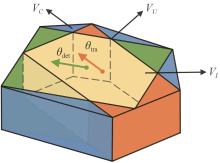
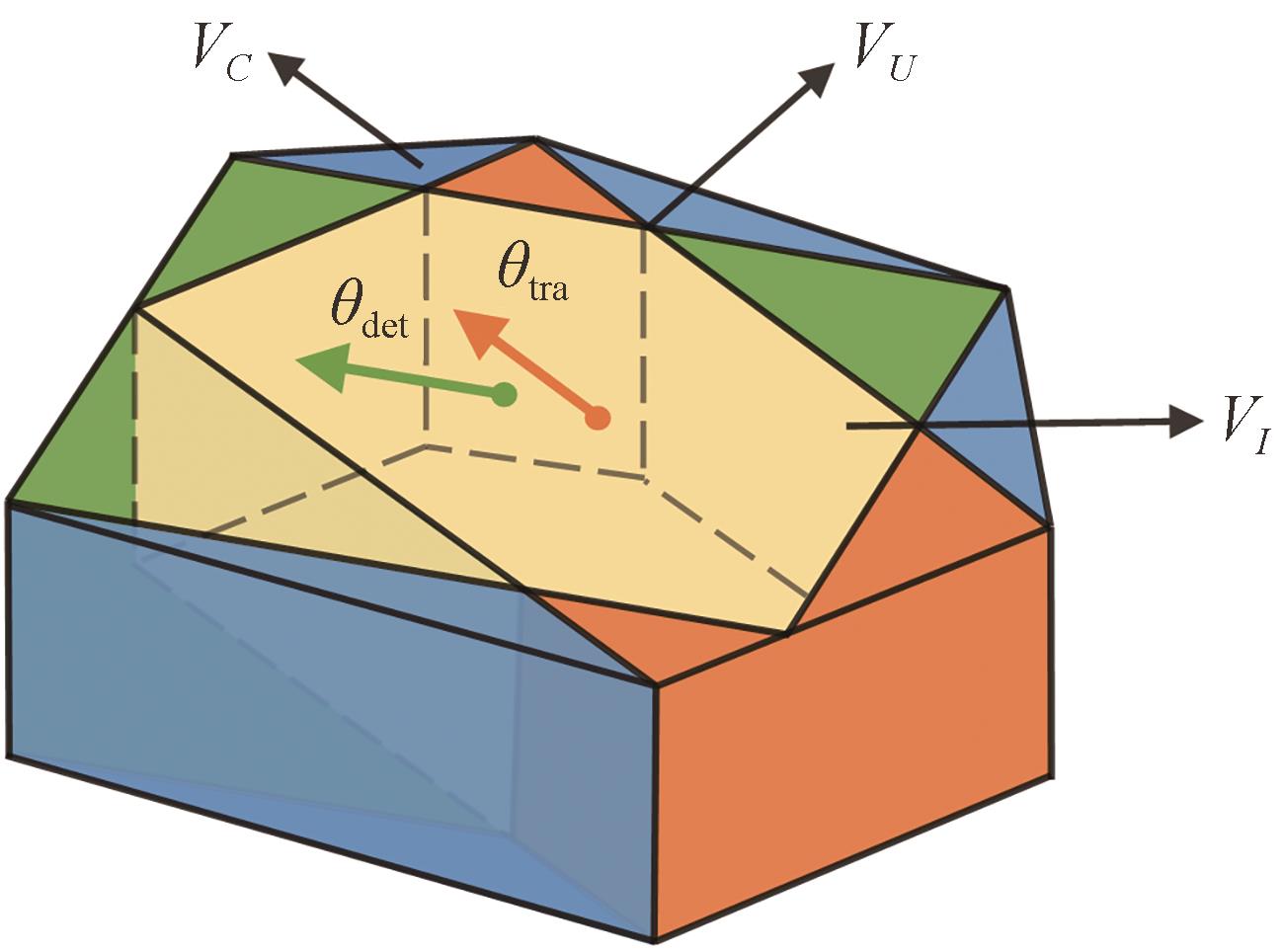
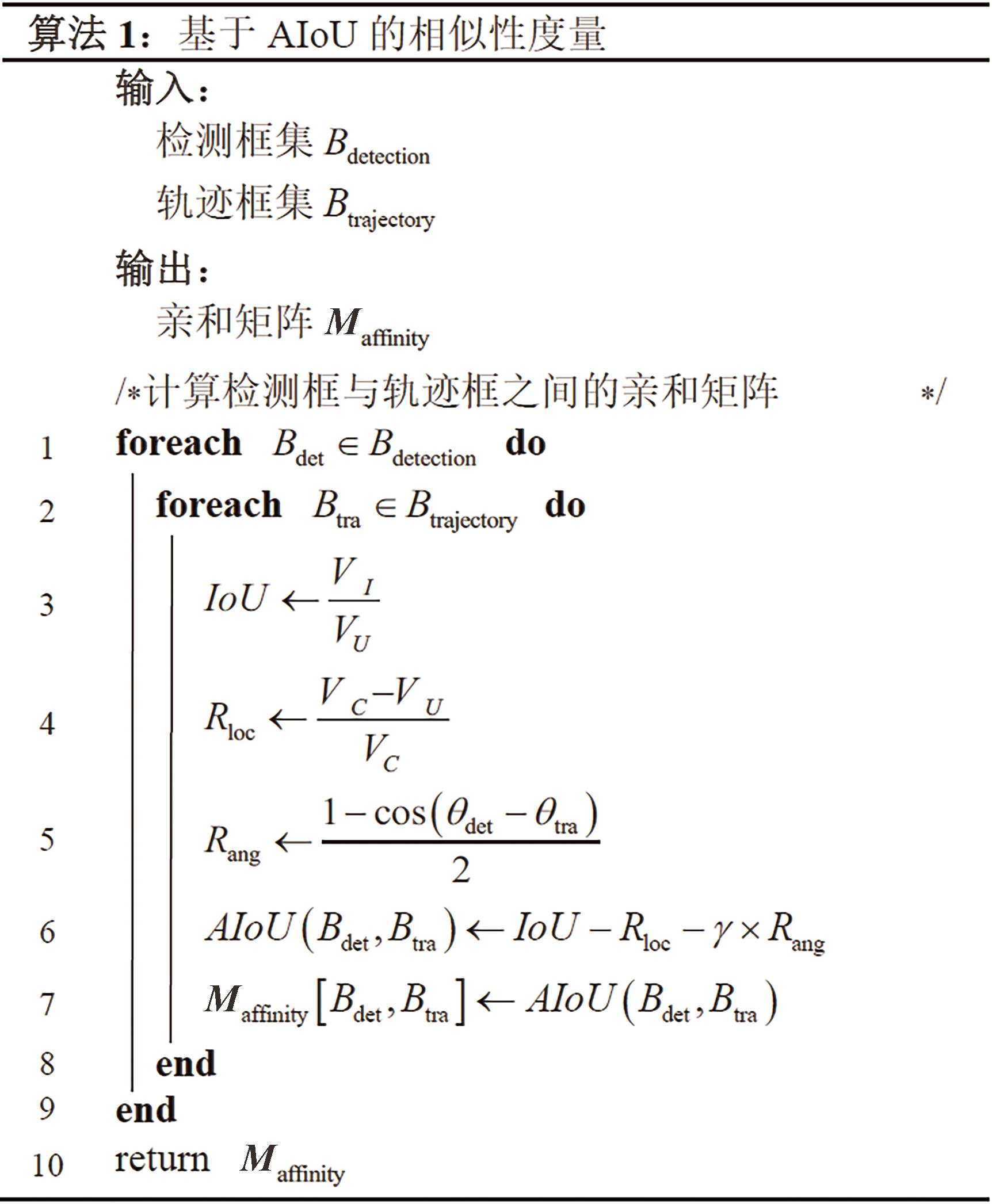
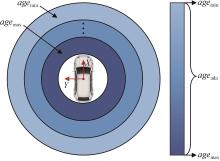
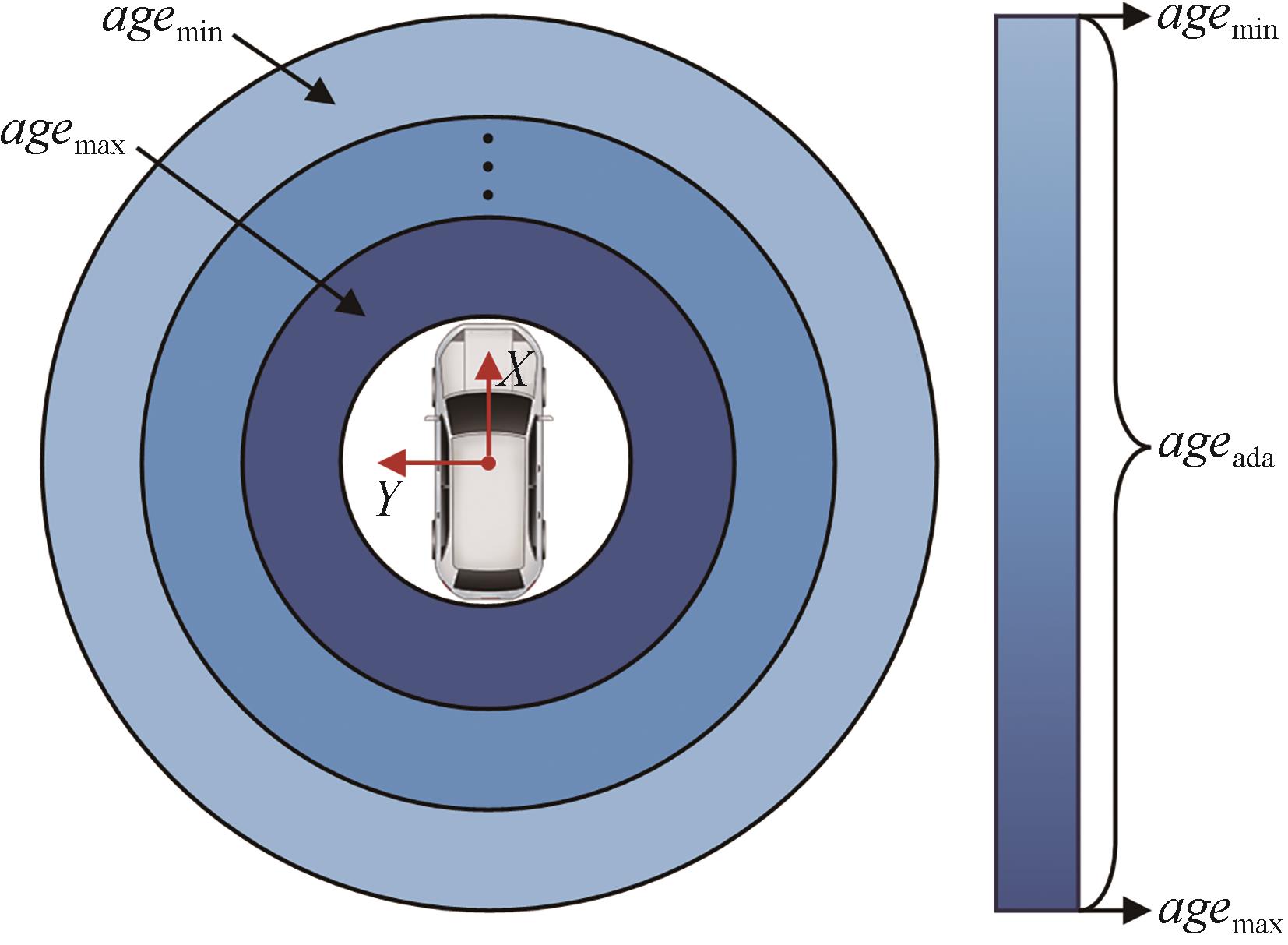
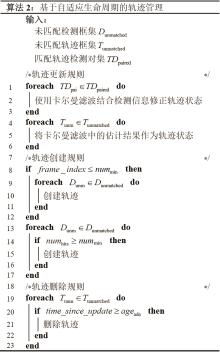
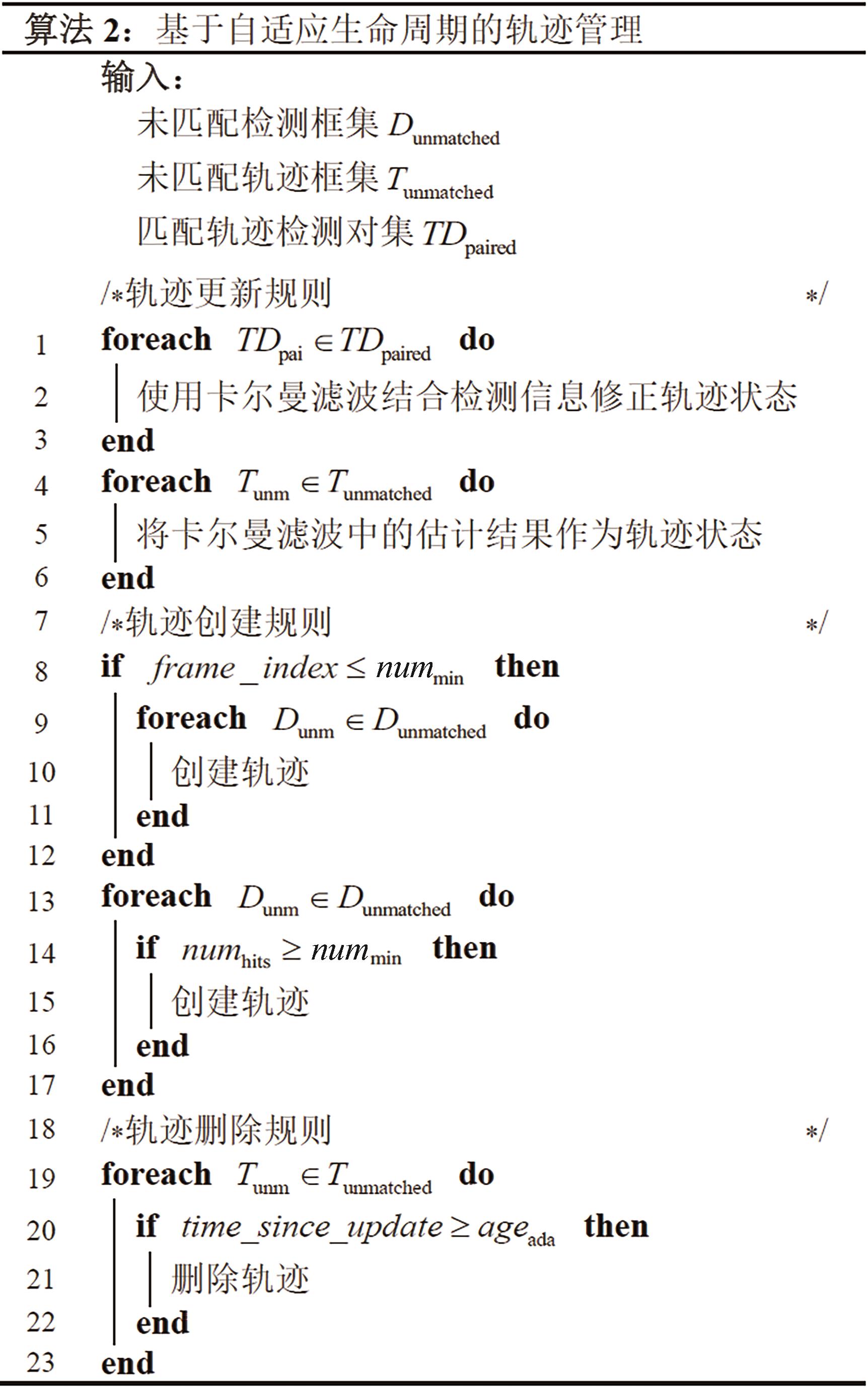
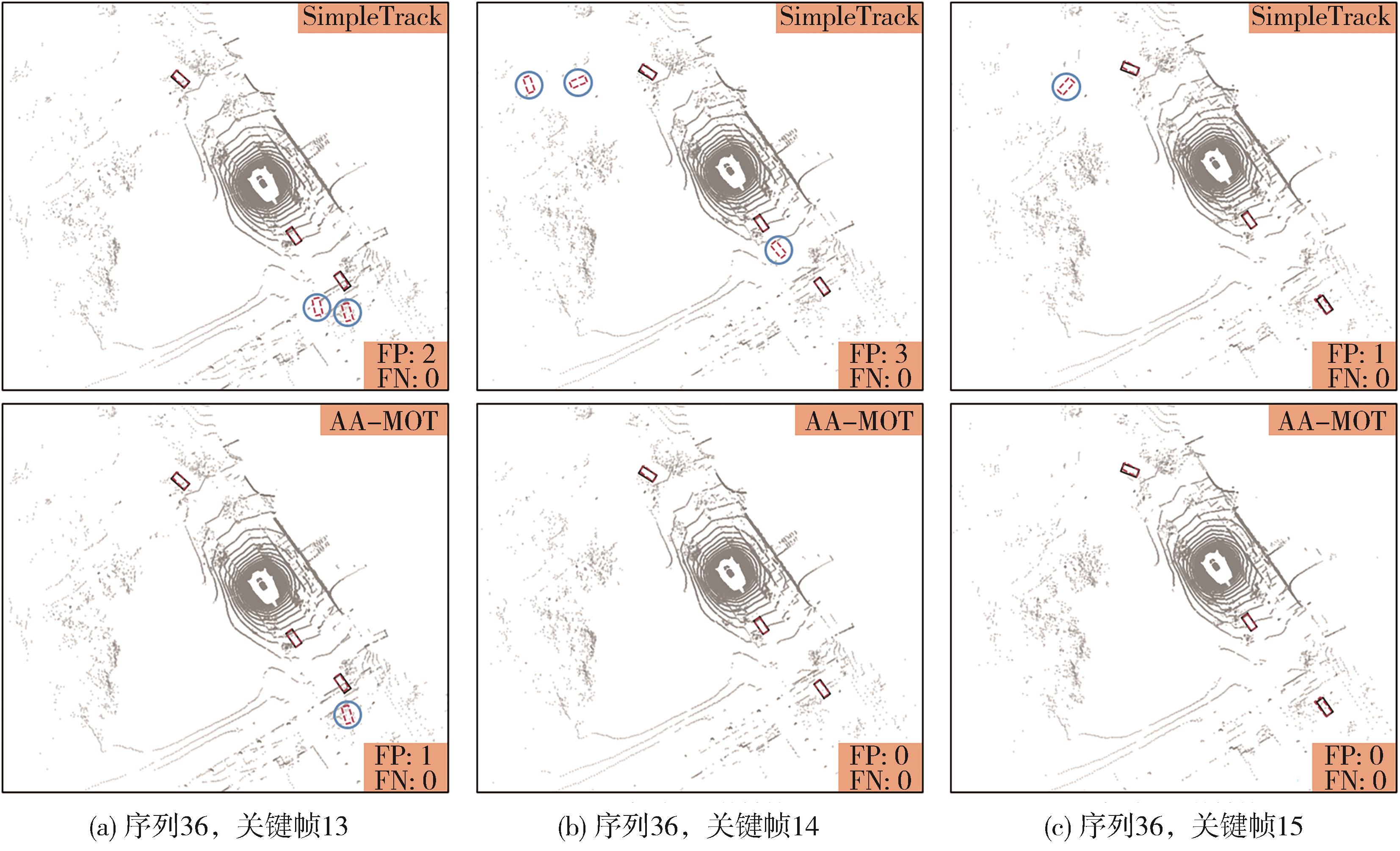
针对智能汽车在真实交通环境跟踪周围目标时面临的轨迹错误关联和过早删除问题,本文提出一种基于角度交并比和自适应生命周期的三维多目标跟踪算法。首先,采用分数过滤与非极大值抑制分别去除低置信度和重叠的检测框,结合恒定速度模型与卡尔曼滤波消除轨迹的帧间位移。其次,考虑位置和角度因素设计角度交并比,使用匈牙利算法求解二部图最优匹配。最后,根据轨迹中断与目标距离第一性原理制定自适应生命周期策略,以动态管理轨迹状况。实验表明,改进后的方法在Waymo数据集上车辆、骑车者和行人3类目标的Mismatch依次为0.07%、0.27%和0.29%,相比于基线算法分别下降0.03%、0.18%和0.21%;在nuScenes数据集上,所提方法的IDS为312次,与基线算法相比降低49.9%。提出的角度交并比和自适应生命周期能够减少身份切换次数,改进的三维多目标跟踪算法可以获得准确稳定的时序轨迹。