| 1 |
LIU J, ZHANG R. Vehicle detection and ranging using two diffe-rent focal length cameras [EB/OL]. [2020-03-20]. .
|
| 2 |
WANG Z, REN W, QIU Q. LaneNet: real-time lane detection networks for autonomous driving[EB/OL]. [2018-07-04]. .
|
| 3 |
LI W, ZHU X, GONG S. Person re-identification by deep joint learning of multi-loss classification[EB/OL]. [2017-05-12]. .
|
| 4 |
ZHANG J, HUANG M, JIN X, et al. A real-time chinese traffic sign detection algorithm based on modified yolov2[J]. Algorithms,2017, 10(4):127.
|
| 5 |
王政军. 基于深度学习的智能驾驶目标及可行驶区域检测研究[D]. 长春:吉林大学,2019.
|
|
WANG Z. Research on object and free space detection of intelligent driving based on deep learning[D]. Changchun:Jilin University, 2019.
|
| 6 |
SADEGHIAN A, ALAHI A, SAVARESE S. Tracking the untrackable: learning to track multiple cues with long-term dependencies [EB/OL]. [2017-01-08]. .
|
| 7 |
刘军,后士浩,张凯,等. 基于单目视觉车辆姿态角估计和逆透视变换的车距测量[J]. 农业工程学报,2018,34(13):70-76.
|
|
LIU J, HOU S, ZHANG K, et al. Vehicle distance measurement with implementation of vehicle attitude angle estimation and inverse perspective mapping based on monocular vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2018,34(13):70-76.
|
| 8 |
REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence,2017,39(6):1137.
|
| 9 |
HE K, GKIOXARI G, DOLLAR P, et al. Mask R-CNN [EB/OL]. [2017-03-20]. .
|
| 10 |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]. Proc of European Conference on Computer Vision, 2016:21-37.
|
| 11 |
REDMON J, FARHADI A. YOLOv3: an incre-mental improvement [EB/OL]. [2018-04-08]. .
|
| 12 |
TIAN Z, SHEN C, CHEN H, et al. FCOS: fully convolutional one-stage object detection[EB/OL]. [2019-04-02]. .
|
| 13 |
LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,39(4):640-651.
|
| 14 |
BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: a deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(12):2481-2495.
|
| 15 |
RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutio-nal networks for biomedical image segmentation[EB/OL]. [2015-05-18]. .
|
| 16 |
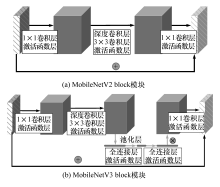
HOWARD A, SANDLER M, CHU G, et al. Searching for MobileNetV3[EB/OL]. [2019-11-20]. .
|
| 17 |
王文冠,沈建冰,贾云得. 视觉注意力检测综述[J]. 软件学报,2019,30(2):416-439.
|
|
WANG W, SHEN J, JIA Y. Review of visual attention detection[J]. Journal of Software,2019,30(2):416-439.
|
| 18 |
IANDOLA F N, HAN S, MOSKEWICZ M W, et al. SqueezeNet: alexnet-level accuracy with 50x fewer parameters and <0.5MB model size[EB/OL]. [2016-02-24]. .
|
| 19 |
HOWARD A G, ZHU M, CHEN B, et al. MobileNets: efficient convolutional neural networks for mobile vision applications[EB/OL]. [2017-04-17]. .
|
| 20 |
SANDLER M, HOWARD A, ZHU M, et al. MobileNetV2: inverted residuals and linear bottlenecks[EB/OL]. [2018-01-13]. .
|
| 21 |
TAN M, CHEN B, PANG R, et al. MnasNet: platform-aware neural architecture search for mobile[EB/OL]. [2018-06-31]. .
|
| 22 |
SHI X, CHEN Z, WANG H, et al. Convolutional LSTM network: a machine learning approach for precipitation nowcasting[EB/OL]. [2015-06-13]. .
|
| 23 |
LIN T Y, DOLLAR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]. Proc of IEEE Conference on Computer Vision and Pattern Recognition,2017:936-944.
|
| 24 |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]. Proc of IEEE Conference on Computer Vision and Pattern Recognition,2016:779-788.
|
 ),陈岚磊,李汉冰
),陈岚磊,李汉冰