Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (6): 1133-1143.doi: 10.19562/j.chinasae.qcgc.2025.06.012
Lingyun Zhu( ),Haiyang Wang
),Haiyang Wang
Received:2024-11-20
Revised:2025-02-04
Online:2025-06-25
Published:2025-06-20
Contact:
Lingyun Zhu
E-mail:zhulingyun@cqut.edu.cn
Lingyun Zhu,Haiyang Wang. Autonomous Vehicle Object Detection by LiDAR Point Cloud Feature Completion in Snowfall Scenarios[J].Automotive Engineering, 2025, 47(6): 1133-1143.
"

"

"

"
"

"

"
"
"
"
| 标签 | 总数 | 已停车 | 已停止 | 正在移动 |
|---|---|---|---|---|
| 汽车 | 281 941 | 193 246 | 18 002 | 70 693 |
| 标签 | 总数 | 成年人 | 儿童 | |
| 行人 | 62 851 | 61 664 | 1 187 |
"
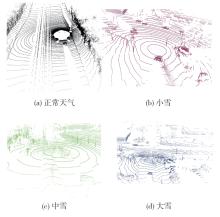
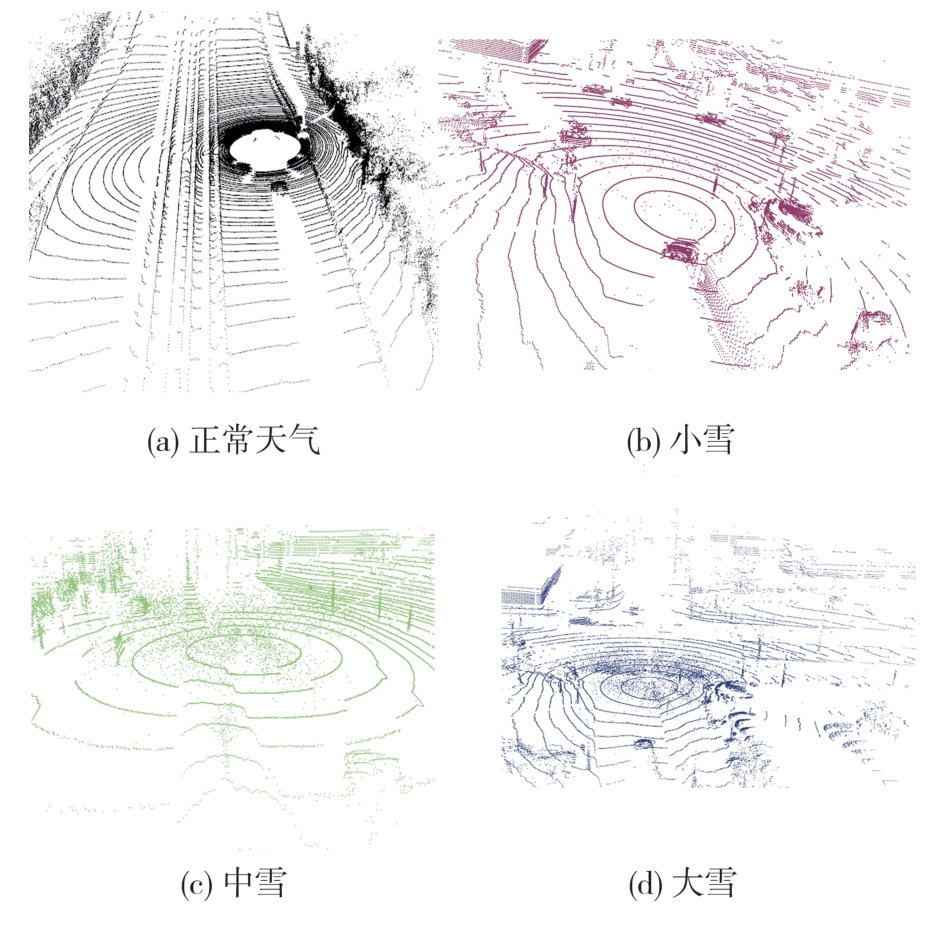
| 距离/m | [ 0, 5 ] | [ | [ | [ |
|---|---|---|---|---|
| 正常天气 | 15 | 139 | 15 | 3 |
| 小雪天气 | 30 | 138 | 49 | 2 |
| 中雪天气 | 45 | 2 001 | 713 | 77 |
| 大雪天气 | 607 | 2 658 | 43 | 6 |
"
| 方法 | 范式 | Car AP3D | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Point pillars | 体素 | 78.23% | 67.93% | 67.91% |
| Second | 体素 | 74.91% | 65.08% | 64.97% |
| SE-SSD | 体素 | 75.74% | 68.90% | 64.27% |
Voxel R-CNN | 体素 | 80.22% | 77.20% | 76.26% |
| BtcDet | 体素 | 79.98% | 73.37% | 68.88% |
| IA-SSD | 点 | 72.94% | 64.81% | 60.59% |
| Ours | 体素 | 80.75% | 75.43% | 72.59% |
"
| 方法 | 范式 | Pedestrian AP3D | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Pointpillars | 体素 | 51.12% | 48.04% | 43.09% |
| Second | 体素 | 53.32% | 49.49% | 42.77% |
| SE-SSD | 体素 | 52.08% | 47.61% | 42.99% |
| Voxel R-CNN | 体素 | 50.13% | 45.74% | 42.60% |
| BtcDet | 体素 | 51.97% | 46.60% | 43.23% |
| IA-SSD | 点 | 49.48% | 44.64% | 40.06% |
| Ours | 体素 | 54.48% | 49.33% | 47.52% |

"


"
"
| 模型 | Normal Weather | Light Snowy | Medium Snowy | Heavy Snowy |
|---|---|---|---|---|
| Baseline | 87.76% | 78.05% | 65.12% | 56.65% |
| Ours | 89.49% | 79.33% | 67.32% | 58.70% |
| 提升 | +1.73% | +1.28% | +2.20% | +2.05% |
"
| 方法 | 范式 | Car 3D APR40 | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Pointpillars | 体素 | 87.75% | 78.39% | 75.18% |
| Second | 体素 | 90.97% | 79.94% | 77.09% |
| SA-SSD | 体素 | 92.23% | 84.30% | 81.36% |
| PV-RCNN | 体素 | 92.57% | 84.30% | 81.36% |
Voxel R-CNN | 体素 | 92.38% | 85.29% | 82.86% |
| SE-SSD | 体素 | 93.19% | 86.12% | 83.31% |
| BtcDet | 体素 | 93.15% | 86.28% | 83.86% |
| IA-SSD | 点 | 88.87% | 80.32% | 75.10% |
| Ours | 体素 | 93.84% | 87.94% | 86.70% |
"
| 方法 | 范式 | Car 3D APR40 | ||
|---|---|---|---|---|
| Easy | Mod | Hard | ||
| Point pillars | 体素 | 82.58% | 74.31% | 68.99% |
| Second | 体素 | 83.13% | 73.66% | 66.20% |
| SA-SSD | 体素 | 88.75% | 79.79% | 74.16% |
| PV-RCNN | 体素 | 90.25% | 81.43% | 76.82% |
| Voxel R-CNN | 体素 | 90.90% | 81.62% | 77.06% |
| SE-SSD | 体素 | 91.94% | 82.54% | 77.15% |
| BtcDet | 体素 | 90.64% | 82.86% | 78.09% |
| IA-SSD | 点 | 88.87% | 80.32% | 75.10% |
| Ours | 体素 | 92.03% | 85.47% | 78.64% |
"
| 组件 | Car AP3D | |||||
|---|---|---|---|---|---|---|
| Baseline | LQ | PR | FR | Easy | Mod | Hard |
| √ | 79.98% | 73.37% | 68.88% | |||
| √ | √ | 80.27% | 73.68% | 70.59% | ||
| √ | √ | 80.32% | 74.66% | 71.84% | ||
| √ | √ | √ | 80.68% | 75.37% | 72.45% | |
| √ | √ | √ | √ | 80.75% | 75.43% | 72.59% |
| +0.77% | +2.06% | +3.71% | ||||
"
| 组件 | Car 3D APR40 | |||||
|---|---|---|---|---|---|---|
| Baseline | LQ | PR | FR | Easy | Mod | Hard |
| √ | 93.15% | 86.28% | 83.86% | |||
| √ | √ | 93.28% | 86.83% | 84.74% | ||
| √ | √ | 93.54% | 86.99% | 85.41% | ||
| √ | √ | √ | 93.62% | 87.17% | 85.89% | |
| √ | √ | √ | √ | 93.84% | 87.94% | 86.70% |
| +0.69% | +1.66% | +2.84% | ||||
"
| 模型 | 点云数量 | 3D APR40 | ||
|---|---|---|---|---|
| Car | Pedestrian | Car | Pedestrian | |
| PR1 | 1 024 | 1 024 | 74.01% | 49.20% |
| PR2 | 16 384 | 16 384 | 74.22% | 48.56% |
| PR3 | 8 096 | 8 096 | 74.31% | 49.03% |
| PR4 | 8 096 | 1 024 | 74.32% | 49.21% |

"
"
| 1 | 胡杰, 安永鹏, 徐文才, 等. 基于激光点云的深度语义和位置信息融合的三维目标检测[J]. 中国激光, 2023, 50(10): 200-210. |
| HU J, AN Y, XU W, et al. 3D object detection based on deep semantics and position information fusion of laser point cloud[J]. Chinese Journal of Lasers, 2023, 50(10): 200-210. | |
| 2 | HENNING M, MÜLLER J, GIES F, et al. Situation-aware environment perception using a multi-layer attention map[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(1): 481-491. |
| 3 | DONG Y, KANG C, ZHANG J, et al. Benchmarking robustness of 3D object detection to common corruptions[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 1022-1032. |
| 4 | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New Orleans, LA, USA 2022: 16364-16374. |
| 5 | PIROLI A, DALLABETTA V, KOPP J, et al. Energy-based detection of adverse weather effects in lidar data[J]. IEEE Robotics and Automation Letters, 2023. |
| 6 | DREISSIG M, SCHEUBLE D, PIEWAK F, et al. Survey on LiDAR perception in adverse weather conditions[J]. arXiv 2023. arXiv preprint arXiv:. |
| 7 | HE C, LI R, ZHANG Y, et al. MSF: motion-guided sequential fusion for efficient 3D object detection from point cloud sequences[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 5196-5205. |
| 8 | LI Y, QI C R, ZHOU Y, et al. MoDAR: using motion forecasting for 3D object detection in point cloud sequences[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Vancouver, Canada, 2023: 9329-9339. |
| 9 | SHI S, JIANG L, DENG J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection[J]. International Journal of Computer Vision, Vancouver, Canada,2023, 131(2): 531-551. |
| 10 | SHI G, LI R, MA C. PillarNet: real-time and high-performance pillar-based 3D object detection[C]. European Conference on Computer Vision. Cham: Springer Nature Switzerland, Tel Aviv, Israel, 2022: 35-52. |
| 11 | PIROLI A, DALLABETTA V, KOPP J, et al. Towards robust 3D object detection in rainy conditions[C]. 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). Bilbao, Spain,2023: 3471-3477. |
| 12 | RUSU R B, COUSINS S. 3D is here: point cloud library (pcl)[C]. 2011 IEEE International Conference on Robotics and Automation. IEEE, 2011: 1-4. |
| 13 | BALTA H, VELAGIC J, BOSSCHAERTS W, et al. Fast statistical outlier removal based method for large 3D point clouds of outdoor environments[J]. IFAC-PapersOnLine, 2018, 51(22): 348-353. |
| 14 | HAN X F, JIN J S, WANG M J, et al. A review of algorithms for filtering the 3D point cloud[J]. Signal Processing: Image Communication, 2017, 57: 103-112. |
| 15 | PARK J I, PARK J, KIM K S. Fast and accurate desnowing algorithm for LiDAR point clouds[J]. IEEE Access, 2020, 8: 160202-160212. |
| 16 | HEINZLER R, PIEWAK F, SCHINDLER P, et al. CNN-based lidar point cloud de-noising in adverse weather[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2514-2521. |
| 17 | 陈熙源,戈明明,姚志婷,等.雨雪天气下的激光雷达滤波算法研究[J].仪器仪表学报,2023,44(7):172-181. |
| CHEN Xiyuan, GE Mingming, YAO Zhiting, et al. Research on LiDAR filtering algorithm in rainy and snowy weather[J]. Chinese Journal of Scientific Instrument, 2023, 44(7): 172-181. | |
| 18 | LIN J, YIN H, YAN J, et al. Improved 3D object detector under snowfall weather condition based on lidar point cloud[J]. IEEE Sensors Journal, 2022, 22(16): 16276-16292. |
| 19 | HEINZLER R, PIEWAK F, SCHINDLER P, et al.CNN-based lidar point cloud de-noising in adverse weather[J].IEEE Robotics and Automation Letters,2020,5(2):2514-2521. |
| 20 | XU Q, ZHOU Y, WANG W, et al. SPG: unsupervised domain adaptation for 3D object detection via semantic point generation[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021: 15446-15456. |
| 21 | LI G, LI J, WANG C, et al. Key supplement: improving 3D car detection with pseudo point cloud[J]. IEEE Sensors Journal, 2023. |
| 22 | XU Q, ZHONG Y, NEUMANN U. Behind the curtain: learning occluded shapes for 3D object detection[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(3): 2893-2901. |
| 23 | 程腾,倪昊,张强,等.基于虚拟点云的二阶段多模态融合网络[J].汽车工程,2024,46(2):222-229. |
| CHENG Teng, NI Hao, ZHANG Qiang, et al. Two-stage multimodal fusion network based on virtual point cloud[J]. Automotive Engineering, 2024, 46(2): 222-229. | |
| 24 | 金立生,张洪瑜,郭柏苍.基于特征增稳的混合固态激光雷达目标检测[J].汽车工程,2024,46(6):1015-1024. |
| JIN Lisheng, ZHANG Hongyu, GUO Baicang. Hybrid solid-state lidar target detection based on feature augmentation[J]. Automotive Engineering, 2024, 46(6): 1015-1024. | |
| 25 | 金宇锋,陶重犇.基于Transformer的融合信息增强3D目标检测算法[J].仪器仪表学报,2023,44(12):297-306. |
| JIN Yufeng, TAO Chongben. Transformer-based fusion information enhanced 3D target detection algorithm [J]. Journal of Instrumentation, 2023, 44(12): 297-306. | |
| 26 | PITROPOV M, GARCIA D E, REBELLO J, et al. Canadian adverse driving conditions dataset[J]. The International Journal of Robotics Research, 2021, 40(4-5): 681-690. |
| 27 | OGUCHI T. Electromagnetic wave propagation and scattering in rain and other hydrometeors[J]. Proceedings of the IEEE, 1983, 71(9): 1029-1078. |
| 28 | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 16364-16374. |
| 29 | ZHANG C, HUANG Z, ANG M H, et al. Lidar degradation quantification for autonomous driving in rain[C]. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021: 3458-3464. |
| 30 | ZHANG C, HUANG Z, TUNG B X L, et al. SmartRainNet: uncertainty estimation for laser measurement in rain[C]. 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023: 10567-10573. |
| 31 | GUIZILINI V, AMBRUS R, BURGARD W, et al. Sparse auxiliary networks for unified monocular depth prediction and completion[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 11078-11088. |
| 32 | YUAN W, KHOT T, HELD D, et al. PCN: point completion network[C]. 2018 International Conference on 3D Vision (3DV). IEEE, 2018: 728-737. |
| 33 | YAN Y, MAO Y, LI B. SECOND: sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10): 3337. |
| 34 | SHI S, GUO C, JIANG L, et al. PV-RCNN: point-voxel feature set abstraction for 3D object detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 10529-10538. |
| [1] | Mingchen Wang,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. MSF-Diffuser: A Multi-sensor Adaptive Fusion Autonomous Driving Method Based on Diffusion Model Under BEV [J]. Automotive Engineering, 2025, 47(6): 1122-1132. |
| [2] | Chenyu Liu,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Camera and Radar Fusion for Autonomous Driving Scenarios [J]. Automotive Engineering, 2025, 47(5): 829-838. |
| [3] | Qirui Qin,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Real-Time Instance Segmentation Algorithm for Autonomous Driving Based on Instance Activation Maps [J]. Automotive Engineering, 2025, 47(4): 614-624. |
| [4] | Jinhui Suo, Xiaowei Wang, Peiwen Jiang, Chi Ding, Ming Gao, Yougang Bian. Domain Adaptive Visual Object Detection for Autonomous Driving Based on Multi-granularity Relation Reasoning [J]. Automotive Engineering, 2025, 47(2): 201-210. |
| [5] | Jiangkun Li,Ruixue Zong,Weiwen Deng,Ying Wang,Juan Ding. Directed Graph-Based Method for Evaluating Similarity in Urban Intersection Scenarios [J]. Automotive Engineering, 2025, 47(1): 23-34. |
| [6] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [7] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [8] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [9] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [10] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [11] | Lisheng Jin,Hongyu Zhang,Baicang Guo. Semi Solid-State LiDAR Object Detection Algorithm Enhanced by Feature Stability Enhancement [J]. Automotive Engineering, 2024, 46(6): 1015-1024. |
| [12] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [13] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [14] | Fuxing Yao,Chao Sun,Yungang Lan,Bing Lu,Bo Wang,Haiyang Yu. A Lane Change Decision Method for Intelligent Connected Vehicles Based on Mixture of Expert Model [J]. Automotive Engineering, 2024, 46(5): 882-892. |
| [15] | Mengfan Li,Zhongxiang Feng,Weihua Zhang,Jingyu Li. Study on Driver's Visual Transfer Characteristics During the Takeover Process of Human-Computer Co-driving Mode [J]. Automotive Engineering, 2024, 46(5): 795-804. |
|
||