| 1 |
JIANG B, CHEN S, XU Q, et al. VAD: vectorized scene representation for efficient autonomous driving[J]. arXiv, 2023.
|
| 2 |
LE D T, SHI H, CAI J, et al. DifFUSER: diffusion model for robust multi-sensor fusion in 3D object detection and BEV segmentation[J]. arXiv, 2024.
|
| 3 |
YANG J, GAO S, QIU Y, et al. GenAD: generalized predictive model for autonomous driving[J]. arXiv, 2024.
|
| 4 |
BAI X, HU Z, ZHU X, et al. TransFusion: robust LiDAR-camera fusion for 3D object detection with transformers[J/OL]. http://arxiv.org/pdf/2203.11496.
|
| 5 |
CHEN S, SUN P, SONG Y, et al. DiffusionDet: diffusion model for object detection[C].2023 IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023: 19773-19786.
|
| 6 |
LIU Z, CAI Y, WANG H, et al. Robust target recognition and tracking of self-driving cars with radar and camera information fusion under severe weather conditions[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 6640-6653.
|
| 7 |
LIN Z, LIU Z, XIA Z, et al. RCBEVDet: radar-camera fusion in bird’s eye view for 3D object detection[J]. arXiv, 2024.
|
| 8 |
SHAO H, WANG L, CHEN R, et al. ReasonNet: end-to-end driving with temporal and global reasoning[C].2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, BC, Canada: IEEE, 2023: 13723-13733.
|
| 9 |
HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780.
|
| 10 |
CHITTA K, PRAKASH A, JAEGER B, et al. TransFuser: imitation with transformer-based sensor fusion for autonomous driving[J]. arXiv, 2022.
|
| 11 |
HU Y, YANG J, CHEN L, et al. Planning-oriented autonomous driving[J/OL]. https://arxiv.org/pdf/2212.10156
|
| 12 |
YANG C, CHEN Y, TIAN H, et al. BEVFormer v2: adapting modern image backbones to bird’s-eye-view recognition via perspective supervision[C].2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, BC, Canada: IEEE, 2023: 17830-17839.
|
| 13 |
WANG H, CHEN Z, CAI Y, et al. Voxel-RCNN-Complex: an effective 3-D point cloud object detector for complex traffic conditions[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12.
|
| 14 |
WANG H, TAO L, PENG Y, et al. Voxel RCNN-HA: a point cloud multiobject detection algorithm with hybrid anchors for autonomous driving[J]. IEEE Transactions on Transportation Electrification, 2024, 10(3): 7286-7296.
|
| 15 |
YAN J, LIU Y, SUN J, et al. Cross modal transformer: towards fast and robust 3D object detection[J]. arXiv, 2023.
|
| 16 |
WANG H, QIU M, CAI Y, et al. Sparse U-PDP: a unified multi-task framework for panoptic driving perception[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(10): 11308-11320.
|
| 17 |
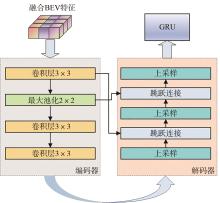
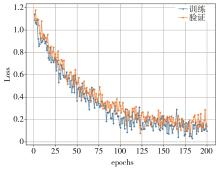
RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[J]. arXiv, 2015.
|
| 18 |
JAEGER B, CHITTA K, GEIGER A. Hidden biases of end-to-end driving models[J]. arXiv, 2023.
|
| 19 |
SHAO H, WANG L, CHEN R, et al. Safety-enhanced autonomous driving using interpretable sensor fusion transformer[J]. arXiv, 2022.
|
| 20 |
HU C, ZHENG H, LI K, et al. FusionFormer: a multi-sensory fusion in bird’s-eye-view and temporal consistent transformer for 3D object detection[J]. arXiv, 2023.
|
| 21 |
CHEN D, KRÄHENBÜHL P. Learning from all vehicles[J]. arXiv, 2022.
|
| 22 |
JIA X, WU P, CHEN L, et al. Think twice before driving: towards scalable decoders for end-to-end autonomous driving[J]. arXiv, 2023.
|
 ),Yingfeng Cai2,Long Chen2,Yicheng Li2
),Yingfeng Cai2,Long Chen2,Yicheng Li2