Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (8): 1468-1478.doi: 10.19562/j.chinasae.qcgc.2025.08.004
Qinyu Sun1,Hang Zhou1( ),Rui Fu1,2,Chang Wang1,2,Tao Huang1,Junfeng Yang1,Yunhao Wang1
),Rui Fu1,2,Chang Wang1,2,Tao Huang1,Junfeng Yang1,Yunhao Wang1
Received:2024-10-29
Revised:2025-01-07
Online:2025-08-25
Published:2025-08-18
Contact:
Hang Zhou
E-mail:zhouhang@chd.edu.cn
Qinyu Sun,Hang Zhou,Rui Fu,Chang Wang,Tao Huang,Junfeng Yang,Yunhao Wang. Prediction of Lane Change Intention Based on Driver's Cognitive-Making Space[J].Automotive Engineering, 2025, 47(8): 1468-1478.

"

"


"
"

"


"
"
| 类别 | 左换道意图时窗/s | 右换道意图时窗/s |
|---|---|---|
| 均值 | 2.96 | 3.09 |
| 标准差 | 0.56 | 0.43 |

"


"


"

"

"
"

"

"

"

"
"

"
"

"
"
"
| 项目 | 版本型号 |
|---|---|
| CPU | i9-10700CPU |
| GPU | NVIDIA RTX 3090 |
| 内存 | 64 GB |
| 环境 | Keras2.2.4和Tensorflow1.15 |
"
| 参数名称 | 数值 |
|---|---|
| Epoch | 100 |
| Batch | 32 |
| 初始学习率 | 0.001 |
| 权值衰减系数 | 0.000 5 |
| 动量系数 | 0.9 |
"
| 输入 | 操作 | c | n | k | s | C-S |
|---|---|---|---|---|---|---|
| 3×256×192×3 | TB(Z-P-2D) | (3,3) | ||||
| 3×262×198×3 | TB(C-A-B-M) | 64 | (7,7) | 2 | ||
| 3×128×96×64 | TB(M-P-2D) | (3,3) | 2 | |||
| 3×64×48×64 | DSC-ECA | [64,64,128] | 1 | 1 | 是 | |
| 3×64×48×128 | DSC-ECA | [64,64,128] | 3 | 否 | ||
| 3×64×48×128 | DSC-ECA | [128,128,256] | 1 | 2 | 是 | |
| 3×32×24×256 | DSC-ECA | [128,128,256] | 2 | 否 | ||
| 3×32×24×256 | DSC-ECA | [256,256,512] | 1 | 2 | 是 | |
| 3×16×12×512 | DSC-ECA | [256,256,512] | 2 | 否 | ||
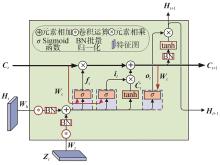
| 3×16×12×512 | ConvLSTM2D | 512 | (3,3) | 2 | ||
| 16×12×512 | GCN | 512 | ||||
| 16×12×512 | C-E-B-M | 512 | (3,3) | 2 | ||
| 8×6×512 | GAP | |||||
| 512 | FC | 256 | ||||
| 256 | FC | 64 | ||||
| 64 | FC | 3 |
"
| 时间宽度/s | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 准确率/% | 85.34 | 87.86 | 91.15 | 89.67 |
"
| 模型 | 训练损失 | 准确率/% | t/s |
|---|---|---|---|
| ResNet[ | 0.192 | 79.67 | 0.28 |
| AlexNet[ | 0.126 | 81.42 | 0.30 |
| Transformer[ | 0.178 | 85.56 | 0.26 |
| 本模型 | 0.021 | 91.15 | 0.31 |
"
| 模型 | 训练损失 | 准确率/% |
|---|---|---|
| 模型1 | 0.055 | 85.68 |
| 模型2 | 0.075 | 82.16 |
| 模型3 | 0.096 | 86.41 |
| 本模型 | 0.021 | 91.15 |
| [1] | LI L, LI P. Analysis of driver's steering behavior for lane change prediction[C].2019 11th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, 2019: 71-75. |
| [2] | SCHMIDT K, BEGGIATO M, HOFFMANN K H, et al. A mathematical model for predicting lane changes using the steering wheel angle[J]. Journal of Safety Research, 2014, 49: 85-90. |
| [3] | DIEHL F, BRUNNER T, LE M T, et al. Graph neural networks for modelling traffic participant interaction[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019: 695-701. |
| [4] | LIU S, TAN D, HONG S, et al. Study on the prediction of lane change intention of intelligent vehicles in the network environment[J]. World Electric Vehicle Journal, 2021, 12(1): 27. |
| [5] | 宋晓琳, 曾艳兵, 曹昊天, 等. 基于长短期记忆网络的换道意图识别方法[J]. 中国公路学报, 2021, 34(11): 236-245. |
| SONG X L, ZENG Y B, CAO H T, et al. Lane-changing intention recognition method based on long short-term memory network[J]. China Journal Of Highway And Transport, 2021, 34(11): 236-245. | |
| [6] | BHATTACHARYA S, BERNADIN S. Eye-glance frequency as a function of driver's intent to change lanes[C]. 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall). IEEE, 2018: 1-5. |
| [7] | GUO Y, ZHANG H, WANG C, et al. Driver lane change intention recognition in the connected environment[J]. Physica A: Statistical Mechanics and its Applications, 2021, 575: 126057. |
| [8] | YI D, SU J, LIU C, et al. Trajectory clustering aided personalized driver intention prediction for intelligent vehicles[J]. IEEE Transactions on Industrial Informatics, 2018, 15(6): 3693-3702. |
| [9] | LIU Z Q, PENG M C, SUN Y C. Estimation of driver lane change intention based on the LSTM and dempster-shafer evidence theory[J]. Journal of Advanced Transportation, 2021. |
| [10] | LIU Y, WANG X, LI L, et al. A novel lane change decision-making model of autonomous vehicle based on support vector machine[J]. IEEE Access, 2019, 7: 26543-26550. |
| [11] | LI X, WANG W, ROETTING M. Estimating driver’s lane-change intent considering driving style and contextual traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(9): 3258-3271. |
| [12] | LI L, ZHAO W, XU C, et al. Lane-change intention inference based on rnn for autonomous driving on highways[J]. IEEE Transactions on Vehicular Technology, 2021, 70(6): 5499-5510. |
| [13] | XING Y, LV C, WANG H, et al. An ensemble deep learning approach for driver lane change intention inference[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 102615. |
| [14] | CHEN S, JIAN Z, HUANG Y, et al. Autonomous driving: cognitive construction and situation understanding [J]. Science China Information Sciences, 2019, 62: 1-27. |
| [15] | DOLAN R J, DAYAN P. Goals and habits in the brain [J]. Neuron, 2013, 80(2): 312-325. |
| [16] | CHEN X, TREIBER M, KANAGARAJ V, et al. Social force models for pedestrian traffic-state of the art [J]. Transport Reviews, 2018, 38(5): 625-653. |
| [17] | HO M K, ABEL D, CORREA C G,et al. People construct simplified mental representations to plan[J]. Nature, 2022, 606(7912): 129-136. |
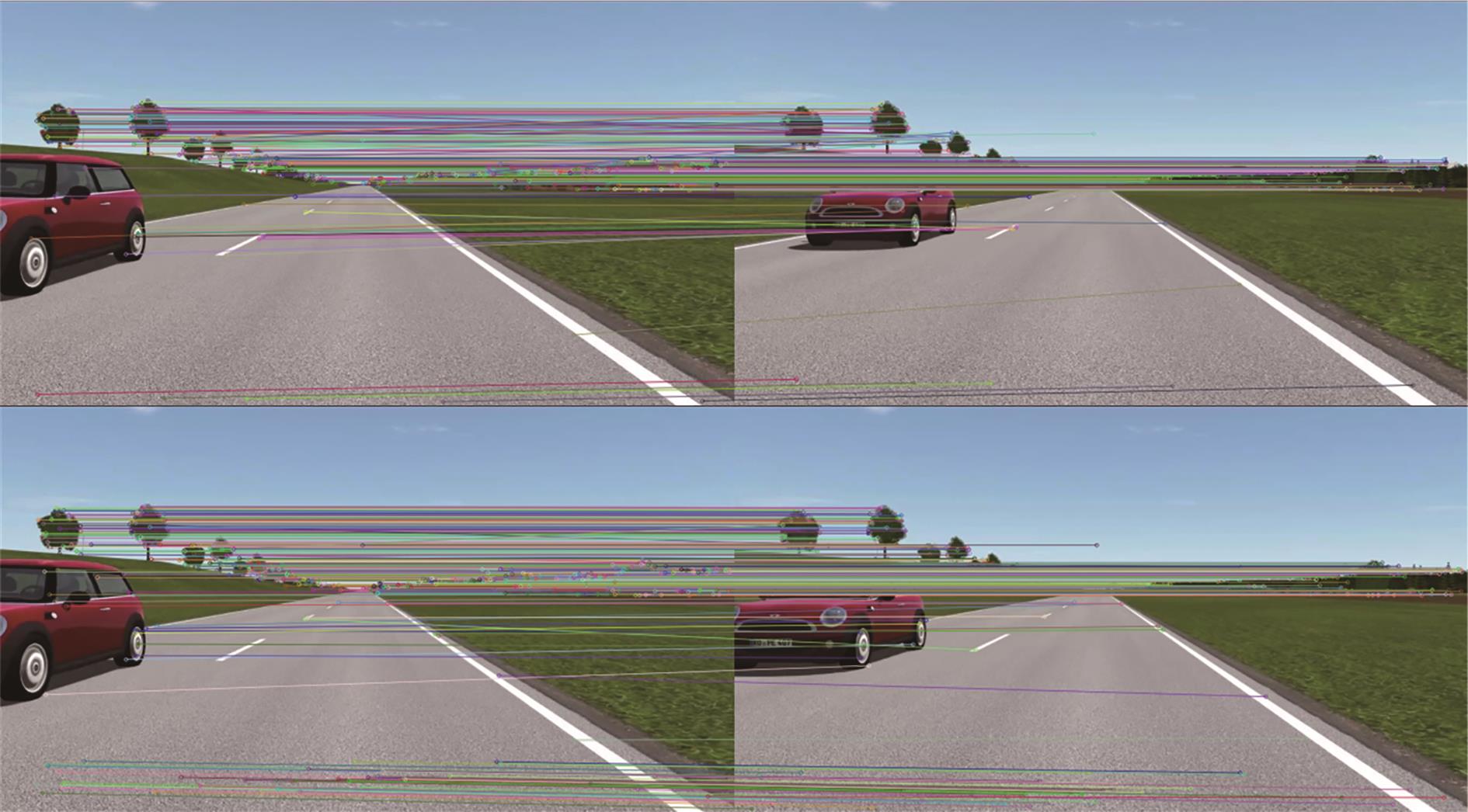
| [18] | PAN Y, ZHANG Q, ZHANG Y, et al. Lane-change intention prediction using eye-tracking technology: a systematic review[J]. Applied Ergonomics, 2022, 103: 103775. |
| [19] | LIU H, WANG T, LI W, et al. Lane-change intention recognition considering oncoming traffic: novel insights revealed by advances in deep learning[J]. Accident Analysis & Prevention, 2024, 198: 107476. |
| [20] | HIMBERGER K D, CHIEN H Y, HONEY C J. Principles of temporal processing across the cortical hierarchy [J]. Neuroscience, 2018, 389: 161-174. |
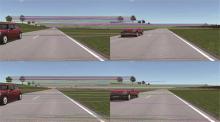
| [21] | LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
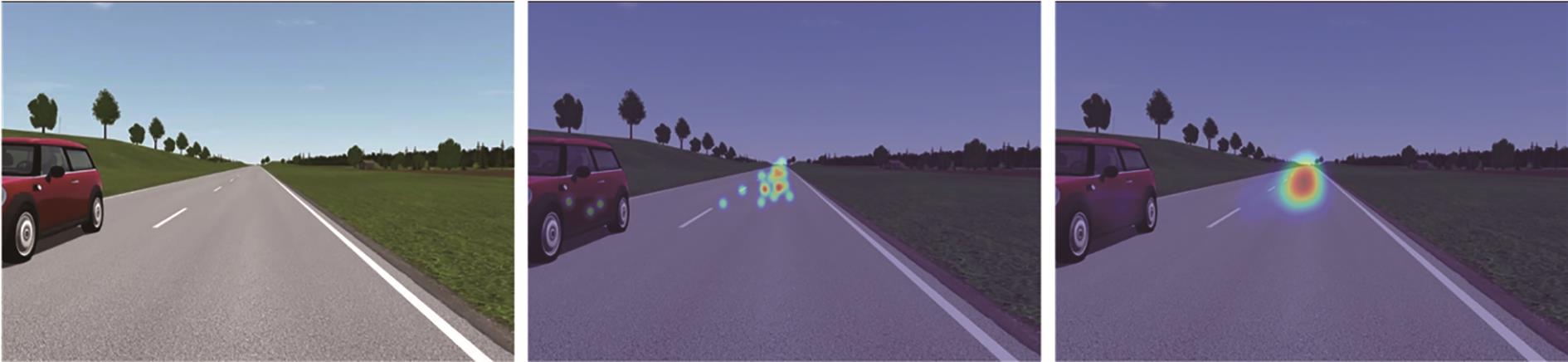
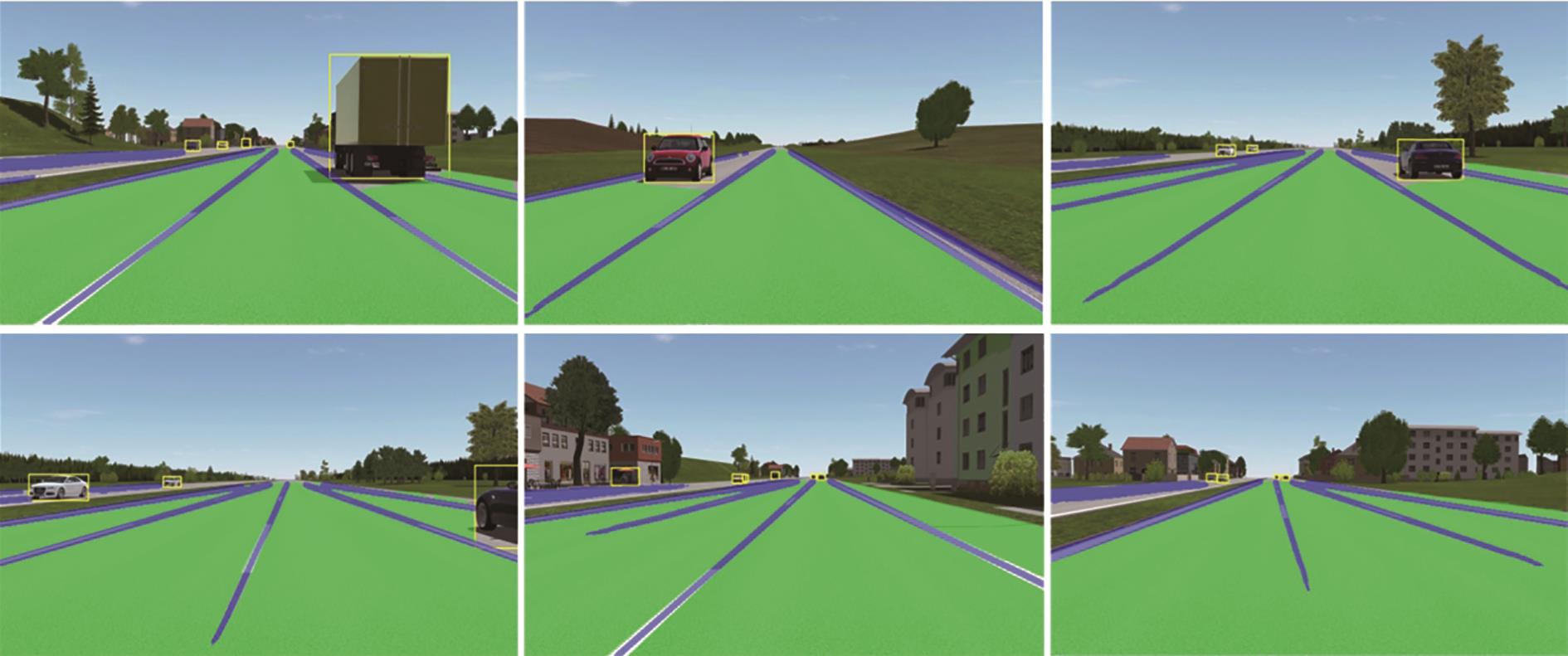
| [22] | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 2980-2988. |
| [23] | PAN Y. Heading toward artificial intelligence 2.0[J]. Engineering, 2016, 2(4): 409-413. |
| [24] | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[J]. arXiv preprint arXiv:, 2014. |
| [25] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| [26] | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: transformers for image recognition at scale[J]. arXiv preprint arXiv:, 2020. |
| [1] | Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Zhitong Gao,Jingwei Xue. Adverse Weather Condition Digital-Physical Fusion Simulation Based Intelligent Vehicle Camera-in-the-loop Test [J]. Automotive Engineering, 2025, 47(7): 1335-1343. |
| [2] | Xiujian Yang,Xulei Feng,Shengbin Zhang,Yongrui Bai. Trajectory Planning for Intelligent Vehicles in Unstructured Environment Based on Spatio-Temporal Corridors [J]. Automotive Engineering, 2025, 47(7): 1357-1368. |
| [3] | Xin Jia,Songlin Li,Yuansheng She,Feng Hong. Research on Environmental Perception Information Unified Fusion Method of Intelligent Vehicle Based on Interactive Multiple Models [J]. Automotive Engineering, 2025, 47(6): 1144-1154. |
| [4] | Kai Gao,Xinyu Liu,Lin Hu,Xiangming Huang,Tiefang Zou,Peng Liu. Vehicle Trajectory Prediction with Spatial-Temporal Interaction Based on Sparse Attention [J]. Automotive Engineering, 2025, 47(5): 809-819. |
| [5] | Chenyu Liu,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Camera and Radar Fusion for Autonomous Driving Scenarios [J]. Automotive Engineering, 2025, 47(5): 829-838. |
| [6] | Lu Xiong,Jiaqi Zhu,Mengyuan Chen,Ziyao Li,Qiang Shu,Guirong Zhuo. Positioning Method Based on Slip Ratio Compensation for Intelligent Vehicles [J]. Automotive Engineering, 2025, 47(5): 851-858. |
| [7] | Bing Zhu,Rui Tang,Jian Zhao,Peixing Zhang,Wenxu Li,Jiasheng Li,Xuefeng Xu. Virtual Simulation Testing Method for Intelligent Vehicle Based on Large Language Model [J]. Automotive Engineering, 2025, 47(4): 587-597. |
| [8] | Qirui Qin,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Real-Time Instance Segmentation Algorithm for Autonomous Driving Based on Instance Activation Maps [J]. Automotive Engineering, 2025, 47(4): 614-624. |
| [9] | Xianghao Meng,Ling Niu,Junqiang Xi,Danni Chen,Chao Lü. Risk Prediction of Heterogeneous Traffic Participants Based on Spatio-Temporal Graph Neural Networks [J]. Automotive Engineering, 2024, 46(9): 1537-1545. |
| [10] | Xiujian Yang,Yongrui Bai. Trajectory Planning for Intelligent Vehicle in Dynamic Unstructured Environment Based on the Graph Search and Optimization Methods [J]. Automotive Engineering, 2024, 46(9): 1564-1575. |
| [11] | Jing Zhao,Hao Liang,Tianxiao Xu,Yayue Xiao,Bowen Jiang. Research on Domain Specific Modeling Language for Intelligent Vehicle Cyber-Physical System [J]. Automotive Engineering, 2024, 46(8): 1370-1381. |
| [12] | Jialiang Zhu,Qiaobin Liu,Fan Yang,Lu Yang,Weihua Li. Two-Dimensional Collision Risk Prediction for Intelligent Vehicles Considering the Influence of Heterogeneous Vehicle Types [J]. Automotive Engineering, 2024, 46(8): 1414-1421. |
| [13] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [14] | Hai Wang,Guirong Zhang,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-modal Data Mining Algorithm for Corner Case of Automatic Driving Road Scene [J]. Automotive Engineering, 2024, 46(7): 1239-1248. |
| [15] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
|
||