Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (5): 809-819.doi: 10.19562/j.chinasae.qcgc.2025.05.002
Previous Articles Next Articles
Kai Gao1,2,Xinyu Liu2,Lin Hu2( ),Xiangming Huang1(),Tiefang Zou2,Peng Liu3
),Xiangming Huang1(),Tiefang Zou2,Peng Liu3
Received:2024-08-14
Revised:2024-11-27
Online:2025-05-25
Published:2025-05-20
Contact:
Lin Hu,Xiangming Huang
E-mail:hulin@csust.edu.cn;h_xiangming@aliyun.com
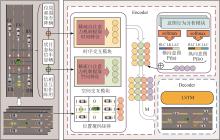
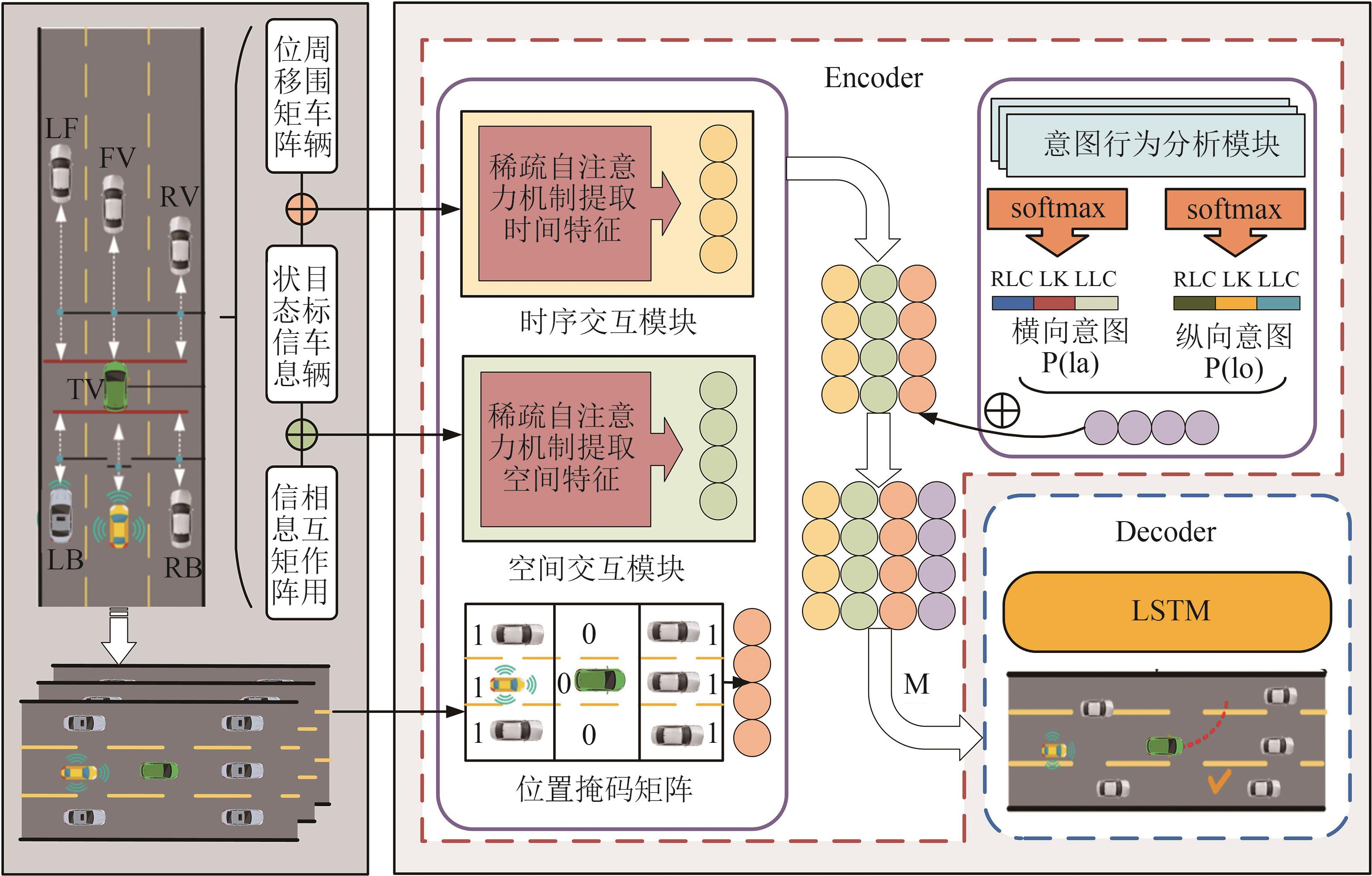
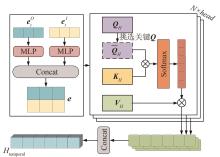
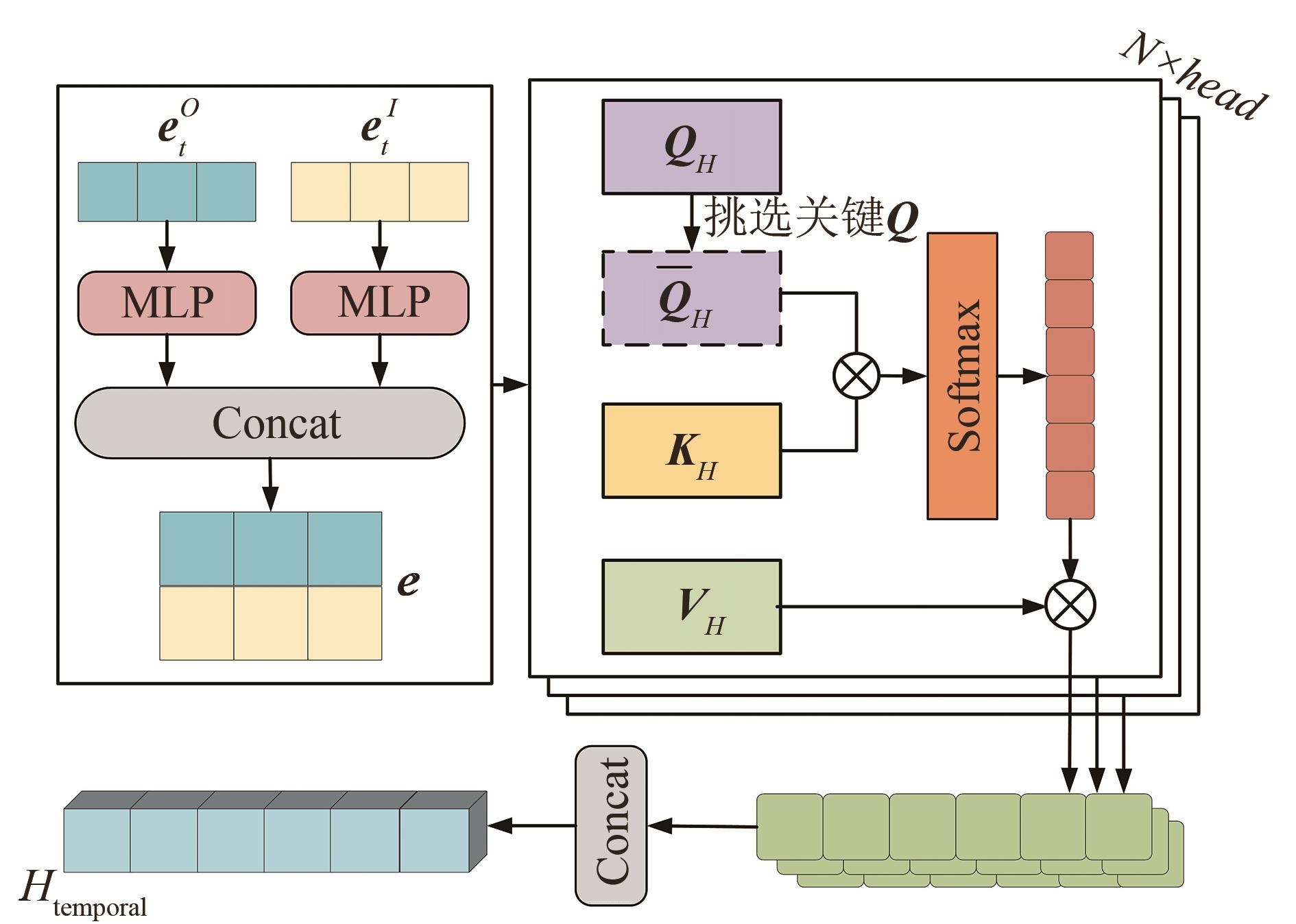
Kai Gao,Xinyu Liu,Lin Hu,Xiangming Huang,Tiefang Zou,Peng Liu. Vehicle Trajectory Prediction with Spatial-Temporal Interaction Based on Sparse Attention[J].Automotive Engineering, 2025, 47(5): 809-819.
"
"
"

"
"
| 参数 | 数值 |
|---|---|
| 输入长度 | 15 |
| 输出长度 | 25 |
| Batch_size | 128 |
| 学习率 | 0.001 |
| Epoch | 2 000 |
| Dropout | 0.1 |
| 头部数目(h) | 5 |
| 特征数(n_features) | 26 |
| 优化算法 | Adam |
| 停止迭代 | 100 patience |
| 损失函数 | NLL |
"

"
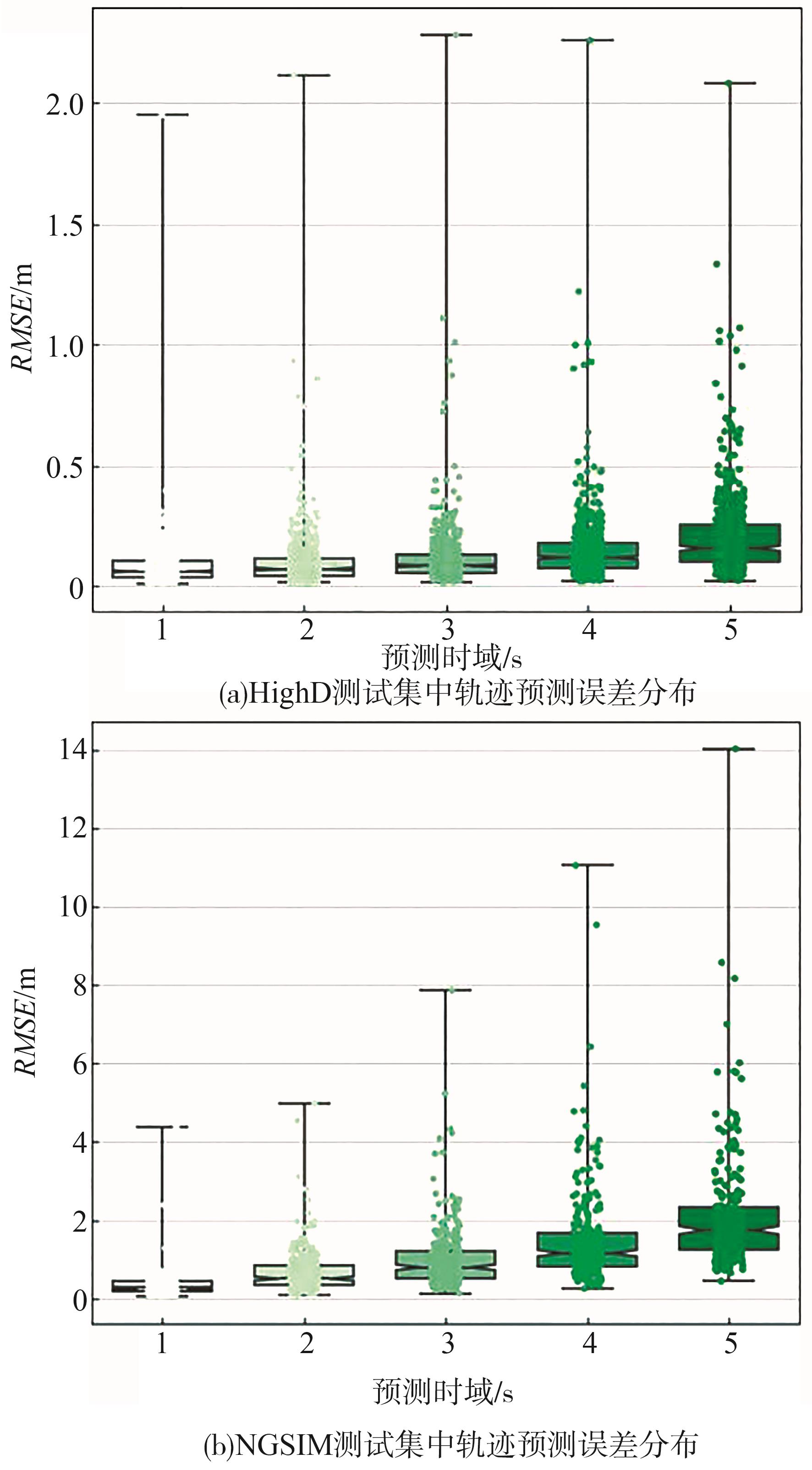
| 数据集 | 预测时长/s | S-LSTM | CS-LSTM | NLS-LSTM | S-GAN | PIP | STDAN | iNATran | STEI |
|---|---|---|---|---|---|---|---|---|---|
| HighD | 1 | 0.22 | 0.22 | 0.2 | 0.3 | 0.17 | 0.19 | 0.04 | 0.14 |
| 2 | 0.62 | 0.61 | 0.57 | 0.78 | 0.52 | 0.27 | 0.05 | 0.15 | |
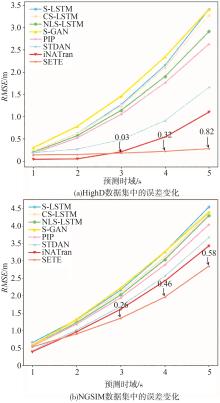
| 3 | 1.27 | 1.24 | 1.14 | 1.46 | 1.05 | 0.48 | 0.21 | 0.18↓ | |
| 4 | 2.15 | 2.1 | 1.9 | 2.34 | 1.76 | 0.91 | 0.54 | 0.22↓ | |
| 5 | 3.41 | 3.27 | 2.91 | 3.41 | 2.63 | 1.66 | 1.10 | 0.28↓ | |
| NGSIM | 1 | 0.65 | 0.61 | 0.56 | 0.57 | 0.55 | 0.42 | 0.39 | 0.53 |
| 2 | 1.31 | 1.27 | 1.22 | 1.32 | 1.18 | 1.01 | 0.96 | 0.90 | |
| 3 | 2.16 | 2.09 | 2.02 | 2.22 | 1.94 | 1.69 | 1.61 | 1.35↓ | |
| 4 | 3.25 | 3.10 | 3.03 | 3.26 | 2.88 | 2.56 | 2.42 | 1.96↓ | |
| 5 | 4.55 | 4.37 | 4.30 | 4.40 | 4.04 | 3.67 | 3.43 | 2.85↓ |

"
"
| 模型 | Time | Memory | Flops/M | Params/M |
|---|---|---|---|---|
| 稀疏注意力 | 3.32 | 0.53 | ||
| 多头注意力 | 3.53 | 0.65 |
"
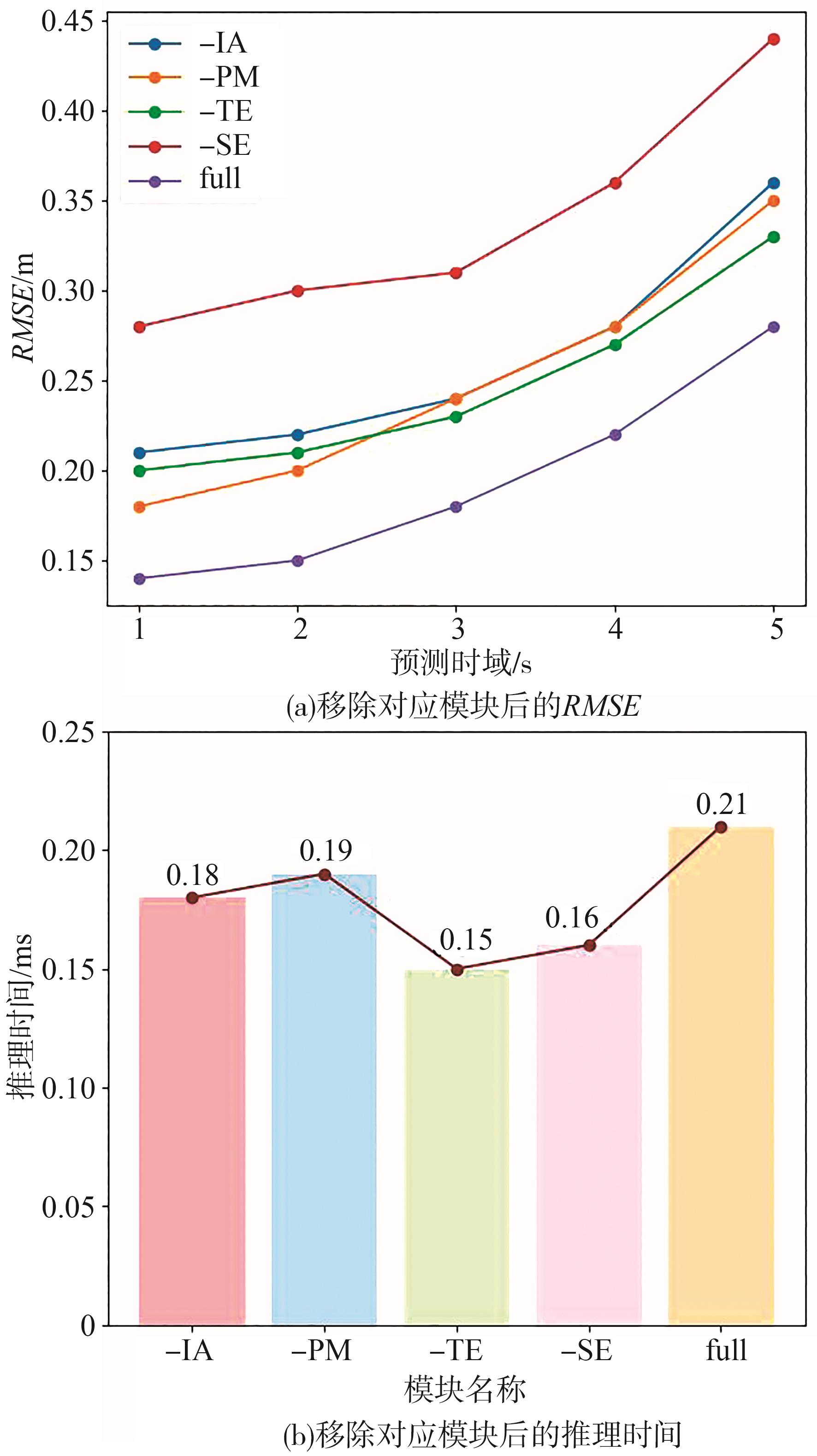
| 模块 | 1 s | 2 s | 3 s | 4 s | 5 s | 推理时间/ms |
|---|---|---|---|---|---|---|
| 移除IA | 0.21 | 0.22 | 0.24 | 0.28 | 0.36 | 0.18 |
| 移除PM | 0.18 | 0.20 | 0.24 | 0.28 | 0.35 | 0.19 |
| 移除 TE | 0.20 | 0.21 | 0.23 | 0.27 | 0.33 | 0.15 |
| 移除 SE | 0.28 | 0.30 | 0.31 | 0.36 | 0.44 | 0.16 |
| STEI | 0.14 | 0.15 | 0.18 | 0.22 | 0.28 | 0.21 |
"
"

"

"
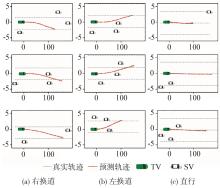
| 场景 | 轨迹预测 | 意图预测 | |||
|---|---|---|---|---|---|
| Lateral | Longitudinal | Lateral | Longitudinal | ||
右 换 道 | 1 s | 0.16 | 3.89 | RLC预测值 | CON预测值 |
| 2 s | 0.18 | 4.44 | 99.93% | 100% | |
| 3 s | 0.20 | 5.01 | 真实标签 | 真实标签 | |
| 4 s | 0.23 | 5.59 | RLC | CON | |
| 5 s | 0.27 | 6.16 | √ | √ | |
左 换 道 | 1 s | 0.031 | 4.66 | LLC预测值 | DEC预测值 |
| 2 s | 0.040 | 5.18 | 99.98% | 55.43% | |
| 3 s | 0.053 | 5.72 | 真实标签 | 真实标签 | |
| 4 s | 0.069 | 6.30 | LLC | DEC | |
| 5 s | 0.084 | 6.83 | √ | √ | |
不 换 道 | 1 s | 0.075 | 4.54 | LK预测值 | CON预测值 |
| 2 s | 0.070 | 5.01 | 98.69% | 99.99% | |
| 3 s | 0.061 | 5.47 | 真实标签 | 真实标签 | |
| 4 s | 0.067 | 5.97 | LK | CON | |
| 5 s | 0.056 | 6.47 | √ | √ | |
| 1 | GOLI S A, FAR B H, FAPOJUWO A O. Vehicle trajectory prediction with Gaussian process regression in connected vehicle environment[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 550-555. |
| 2 | HUBMANN C, SCHULZ J, BECKER M, et al. Automated driving in uncertain environments: planning with interaction and uncertain maneuver prediction[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3 (1): 5-17. |
| 3 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 4 | 季学武,费聪,何祥坤,等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报,2019,32(6): 34-42. |
| JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 5 | FEI C, HE X K, JI X. Multi-modal vehicle trajectory prediction based on mutual information[J]. IET Intelligent Transport Systems, 2020, 14(3): 148-153. |
| 6 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 7 | XIN L, WANG P, CHAN C, et al. Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks[C]. 21st International Conference on Intelligent Transportation Systems. New York: IEEE, 2018: 1441-1446. |
| 8 | HOU L, XIN L, LE S E, et al. Interactive trajectory prediction of surrounding road users for autonomous driving using structural LSTM network[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4615-4625. |
| 9 | KIM B, KANG C M, KIM J, et al. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network[C]. IEEE 20th International Conference on Intelligent Transportation Systems. New York: IEEE, 2017: 399-404. |
| 10 | WU Y, CHEN G, LI Z, et al. HSTA: a hierarchical spatio-temporal attention model for trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11295-11307. |
| 11 | MO X Y, XING Y, LV C. Interaction-aware trajectory prediction of connected vehicles using CNN-LSTM networks[C]. 46th Annual Conference of the IEEE-Industrial- Electronics Society (IECON). New York: IEEE, 2020: 5057-5062. |
| 12 | XIE G, SHANGGUAN A, FEI R, et al. Motion trajectory prediction based on a CNN-LSTM sequential model[J]. Science China Information Sciences, 2020, 63(11): 1-21. |
| 13 | MUKHERJEE S, WANG S, WEALLACE A. Interacting vehicle trajectory prediction with convolutional recurrent neural networks[C]. IEEE International Conference on Robotics and Automation. New York: IEEE, 2020: 4336-4342. |
| 14 | 高凯,李勋豪,胡林,等. 基于多头注意力的CNN-LSTM的换道意图预测[J]. 机械工程学报,2022,58(22):369-378. |
| GAO K, LI X H, HU L, et al. Lane change intention prediction of CNN-LSTM based on multi-head attention[J]. Journal of Mechanical Engineering, 2022, 58(22): 369-378. | |
| 15 | 金立生,高 铭,郭柏苍,等.基于时空融合 LSTM 网络的驾驶视角轨迹预测[J].中国公路学报,2022,35(4):325-332. |
| JIN L S, GAO M, GUO B C, et al, Driver perspective trajectory prediction based on spatiotemporal fusion LSTM network [J]. China Journal of Highway and Transport, 2022, 35(4): 325-332. | |
| 16 | 曹昊天,施惠杰,宋晓琳,等.基于多特征融合的行人意图以及行人轨迹预测方法研究[J].中国公路学报,2022,35(10):308-318. |
| CAO H T, SHI H J, SONG X L, et al. Prediction of pedestrian intention and trajectory based on multi-feature fusion [J]. China Journal of Highway and Transport, 2022, 35(10): 308-318. | |
| 17 | LI C, LIU Z W, ZHANG J Y, et al. Two-stream LSTM network with hybrid attention for vehicle trajectory prediction [C]. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2022: 1927-1934. |
| 18 | FU M, ZHANG T, SONG W, et al. Trajectory prediction-based local spatio-temporal navigation map for autonomous driving in dynamic highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(7): 6418-6429. |
| 19 | CAI Y, WANG Z, WANG H, et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021, 70(11): 11216-11227. |
| 20 | BECKER S, HUG R, HUBNER W, et al. An evaluation of trajectory prediction approaches and notes on the trajnet benchmark [J/OL]. Computer Vision and Pattern Recognition, 2022. https://arxiv. org/abs/1805.07663. |
| 21 | GIULIARI F, HASAN I, CRISTANI M, et al. Transformer networks for trajectory forecasting[C]. 2020 25th International Conference on Pattern Recognition (ICPR). New York: IEEE, 2021: 10335-10342. |
| 22 | HOU L, LI S E, YANG B, et al. Structural transformer improves speed-accuracy trade-off in interactive trajectory prediction of multiple surrounding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24778-24790. |
| 23 | 刘占文,李文倩,林杉,等. 基于稀疏权重共享的多模态轨迹预测[J]. 中国公路学报,2023,36(9): 244-256. |
| LIU Z W, LI W Q, LIN S, et al. Multimodal trajectory prediction based on sparse weight sharing[J]. China Journal of Highway and Transport, 2023, 36(9): 244-256. | |
| 24 | GOLI S A, FAR B H, FAPOJUWO A O. Vehicle trajectory prediction with Gaussian process regression in connected vehicle environment[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2018: 550-555. |
| 25 | 李文礼,韩迪,石晓辉,等. 基于时-空注意力机制的车辆轨迹预测[J]. 中国公路学报, 2023,36(1): 226-239. |
| LI W L, HAN D, SHI X H, et al. Vehicle trajectory prediction based on spatial-temporal attention mechanism[J]. China Journal of Highway and Transport, 2023, 36(1): 226-239. | |
| 26 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. Advances in Neural Information Processing Systems (NIPS). New York: NIPS, 2017: 5998-6008. |
| 27 | ZHOU H, ZHANG S, PENG J, et al. Informer: beyond efficient transformer for long sequence time-series forecasting[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(12): 11106-11115. |
| 28 | ZHAO M, ZHONG S, FU X, et al. Deep residual networks with adaptively parametric rectifier linear units for fault diagnosis[J]. IEEE Transactions on Industrial Electronics, 2020, 68(3): 2587-2597. |
| 29 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highd dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). New York: IEEE, 2018: 2118-2125. |
| 30 | COLYAR J,HALKIAS J. Us highway 101 dataset[R]. Federal Highway Administration (FHWA), Tech. Rep. FHWA-HRT-07-030, 2007:27-69. |
| 31 | ABADI M, AGARWAL A, BARHAM P, et al. Tensorflow: large-scale machine learning on heterogeneous distributed systems[J]. arXiv preprint arXiv:, 2016. |
| 32 | LI Z, WANG Y, ZUO Z. Interaction-aware prediction for cut-in trajectories with limited observable neighboring vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(3): 2148-2161. |
| 33 | SONG H,DING W,CHEN Y,et al. Pip: planning-in-formed trajectory prediction for autonomous driving [C]. Computer Vision-ECCV 2020: 16th European Conference. Berlin: Springer International Publishing, 2020:598-614. |
| 34 | ALAHI A,GOEL K,RAMANATHAN V,et al. Social LSTM: human trajectory prediction in crowded spaces[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). New York: IEEE, 2016: 961-971. |
| 35 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops. New York: IEEE, 2018: 1468-1476. |
| 36 | MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Non-local social pooling for vehicle trajectory prediction[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). New York: IEEE, 2019: 975-980. |
| 37 | GUPTA A, JOHNSON J, FEI-FEI L, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2018: 2255-2264. |
| 38 | CHEN X, ZHANG H, ZHAO F, et al. Intention-aware vehicle trajectory prediction based on spatial-temporal dynamic attention network for internet of vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19471-19483. |
| 39 | CHEN X, ZHANG H, ZHAO F, et al. Vehicle trajectory prediction based on intention-aware non-autoregressive transformer with multi-attention learning for internet of vehicles[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12. |
| 40 | DEO N, WOLFF E, BEIJBOM O. Multimodal trajectory prediction conditioned on lane-graph traversals[C]. Conference on Robot Learning. New York: PMLR, 2022: 203-212. |
| [1] | Chenyu Liu,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Camera and Radar Fusion for Autonomous Driving Scenarios [J]. Automotive Engineering, 2025, 47(5): 829-838. |
| [2] | Qirui Qin,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Real-Time Instance Segmentation Algorithm for Autonomous Driving Based on Instance Activation Maps [J]. Automotive Engineering, 2025, 47(4): 614-624. |
| [3] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [4] | Bing Zhu,Tianxin Fan,Jian Zhao,Peixing Zhang,Dongjian Song,Yue Xue,Wenbo Zhao. Generation Method for Anthropomorphic Continuous Interactive Test Scenarios of Automated Driving [J]. Automotive Engineering, 2024, 46(9): 1600-1607. |
| [5] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [6] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [7] | Hai Wang,Guirong Zhang,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-modal Data Mining Algorithm for Corner Case of Automatic Driving Road Scene [J]. Automotive Engineering, 2024, 46(7): 1239-1248. |
| [8] | Zhigang Yang,Yujing Li,Chao Xia,Mengjia Wang,Lei Yu. A High Time-Resolution Reconstruction on the Automotive Turbulent Wake Based on LSTM-POD [J]. Automotive Engineering, 2024, 46(7): 1302-1313. |
| [9] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [10] | Juan Zeng,Hao Wang,Bo Xu,Hongchang Zhang. Research on the Driver's Hazard Perception State Recognition Model Based on Strength and Weakness Perception Design [J]. Automotive Engineering, 2024, 46(6): 995-1005. |
| [11] | Hongyi Liang,Jikai Chen,Wanli Liu,Fengchong Lan,Bingda Mo,Jiqing Chen. Prediction of the Remaining Useful Life of Real Vehicle Lithium Batteries by Fusion of K-means Clustering and Sequence Decomposition [J]. Automotive Engineering, 2024, 46(4): 634-642. |
| [12] | Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios [J]. Automotive Engineering, 2024, 46(3): 396-406. |
| [13] | Haifeng Sang,Zishan Zhao,Jinyu Wang,Wangxing Chen. Research on Adversarial Attacks and Robustness in Vehicle Trajectory Prediction [J]. Automotive Engineering, 2024, 46(3): 407-417. |
| [14] | Song Gao,Jianglin Zhou,Bolin Gao,Jian Lu,He Wang,Yueyun Xu. Pedestrian Trajectory Prediction Method Based on Multi-information Fusion Network [J]. Automotive Engineering, 2024, 46(11): 1973-1982. |
| [15] | Qin Shi,Zhiwei Li,Teng Cheng,Qiang Zhang,Wenchong Wang. Intrusion Detection Framework for CAN Networks Based on Evidence Deep Learning [J]. Automotive Engineering, 2024, 46(11): 2039-2045. |
|
||