汽车工程 ›› 2024, Vol. 46 ›› Issue (3): 438-447.doi: 10.19562/j.chinasae.qcgc.2024.03.007
• • 上一篇
朱仲文,陆阳,王维志( ),李丞,江维海
),李丞,江维海
Zhongwen Zhu,Yang Lu,Weizhi Wang(),Cheng Li,Weihai Jiang
摘要:
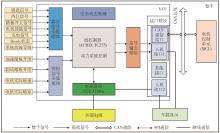
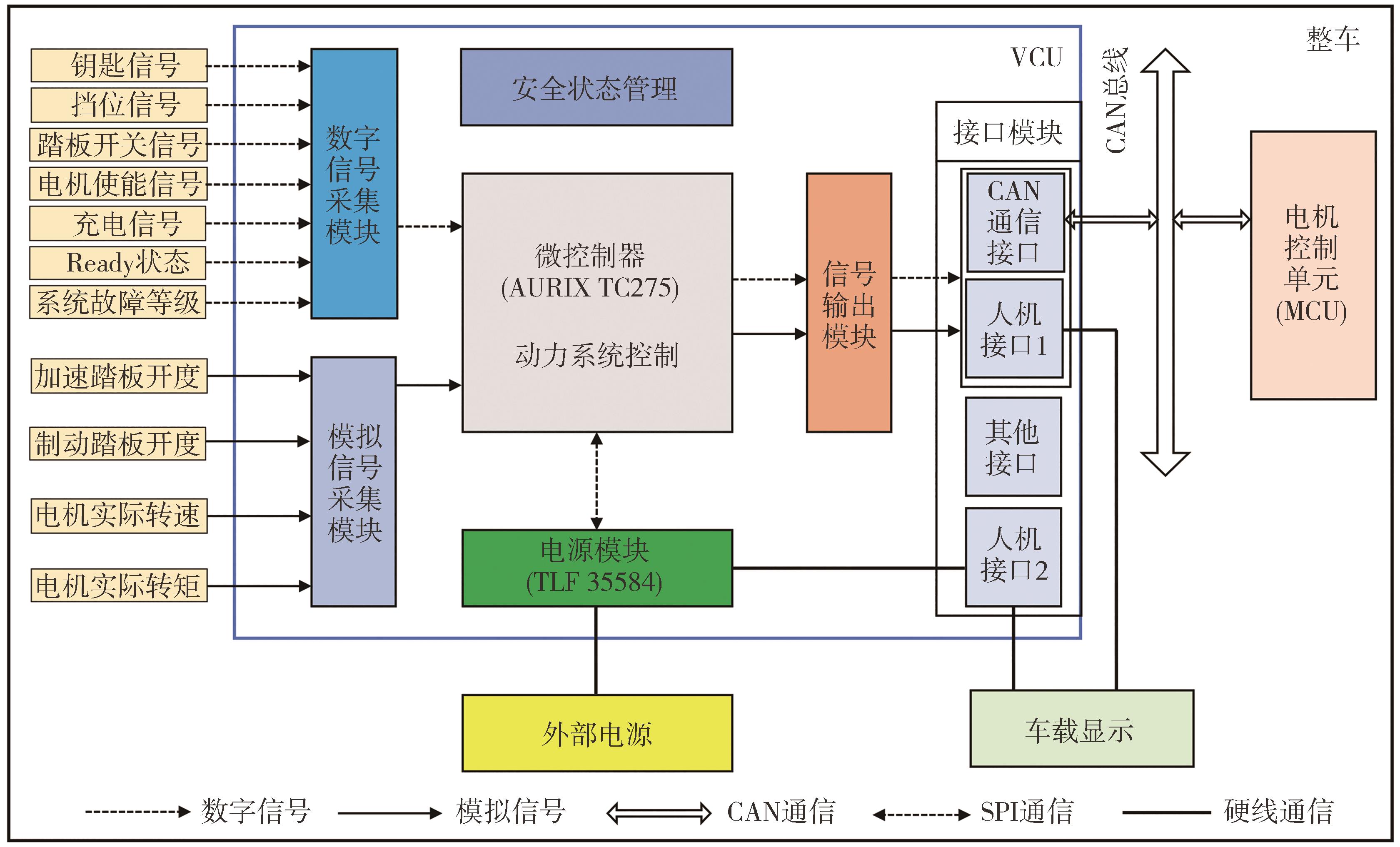
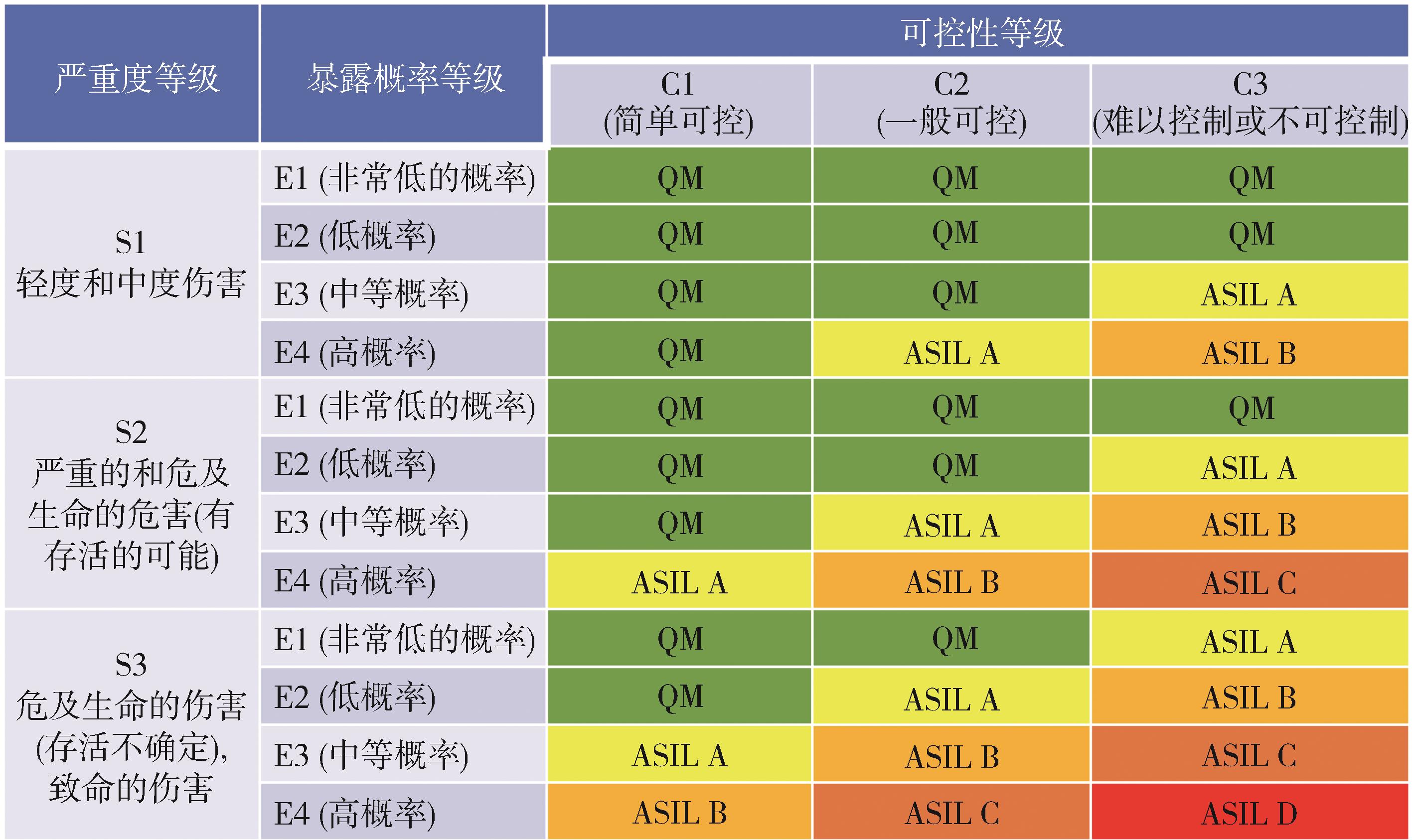
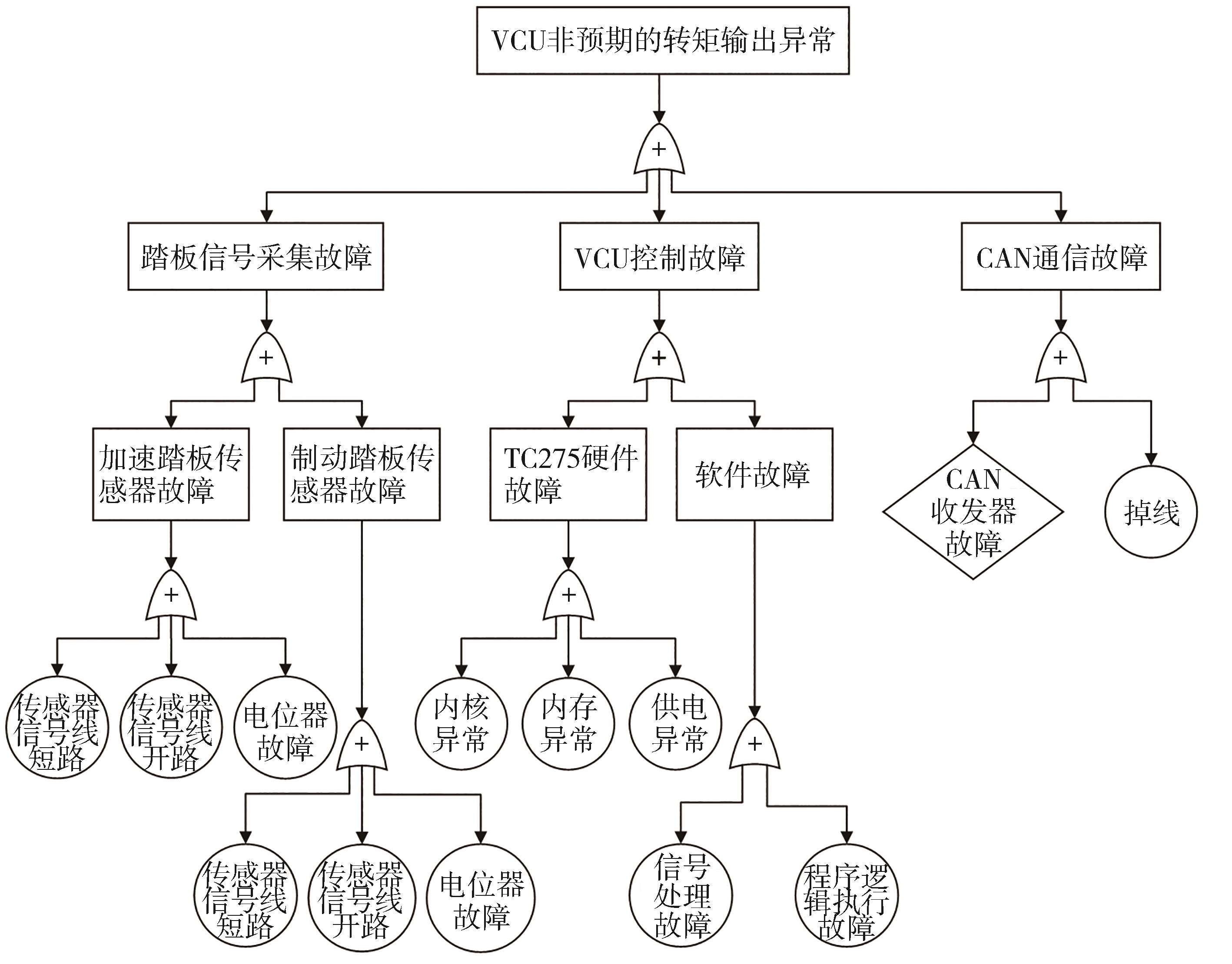
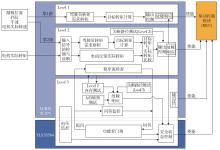
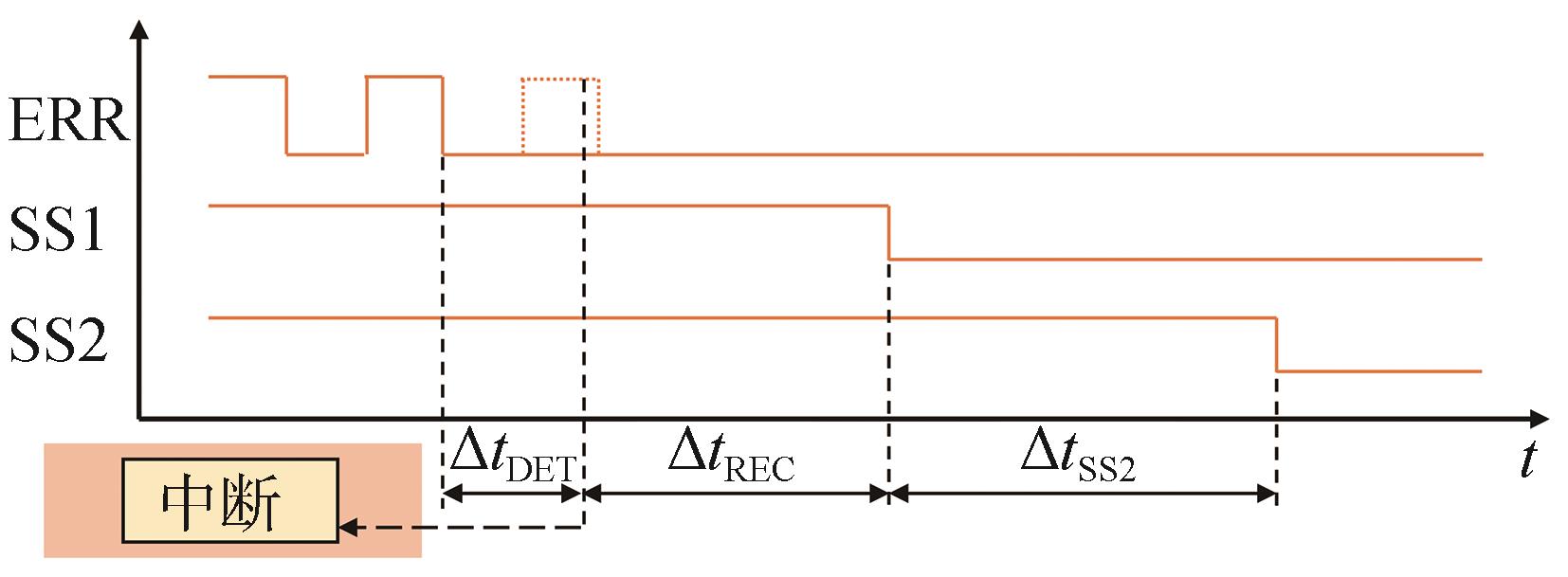
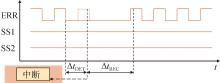
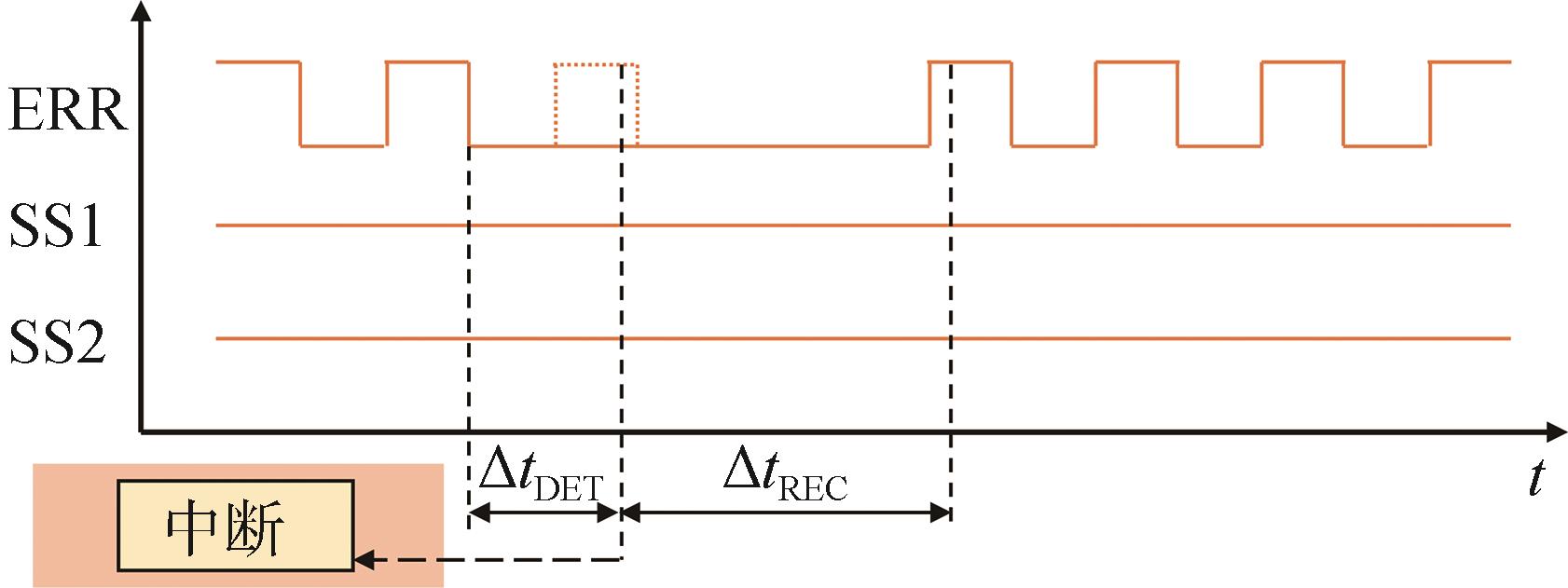
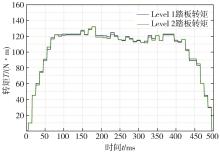
转矩控制作为整车控制器(VCU)的核心功能,保证其安全性至关重要。为此,本文针对VCU非预期的转矩输出异常的问题,参考ISO 26262标准开展功能安全分析,并提出一种基于EGAS架构的转矩控制3层监控策略。首先,以VCU相关项定义为基础,通过危害分析与风险评估确定汽车安全完整性等级以及安全目标。其次,采用故障树分析方法导出功能安全要求以及技术安全要求。再次,针对安全目标,设计了基于AURIX TC275三核主控芯片与TLF35584电源监控芯片的功能安全机制。此外,通过3层监控策略分配CPU资源,实现转矩控制基本功能与监控功能的分离。最后,进行处理器在环测试,包括UDE调试、UDS诊断以及TLF35584安全状态控制测试。结果表明:该3层监控策略能够实现VCU转矩控制的基本功能并在出现故障时及时进入安全状态,从而达到安全目标。