汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1853-1862.doi: 10.19562/j.chinasae.qcgc.2024.10.012
章军辉1,2,3,4( ),郭晓满2,4,刘禹希2,4,郑明强2,4,钱宇晗2,4,丁羽璇2,4
),郭晓满2,4,刘禹希2,4,郑明强2,4,钱宇晗2,4,丁羽璇2,4
Junhui Zhang1,2,3,4(),Xiaoman Guo2,4,Yuxi Liu2,4,Mingqiang Zheng2,4,Yuhan Qian2,4,Yuxuan Ding2,4
摘要:
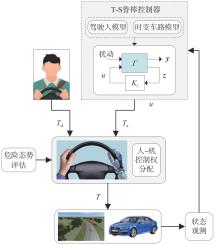
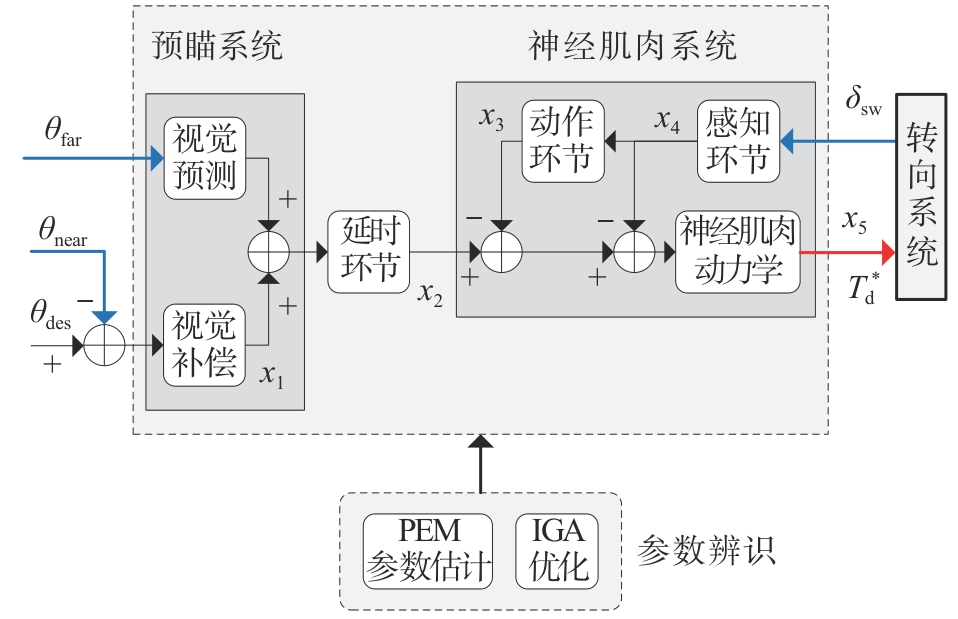
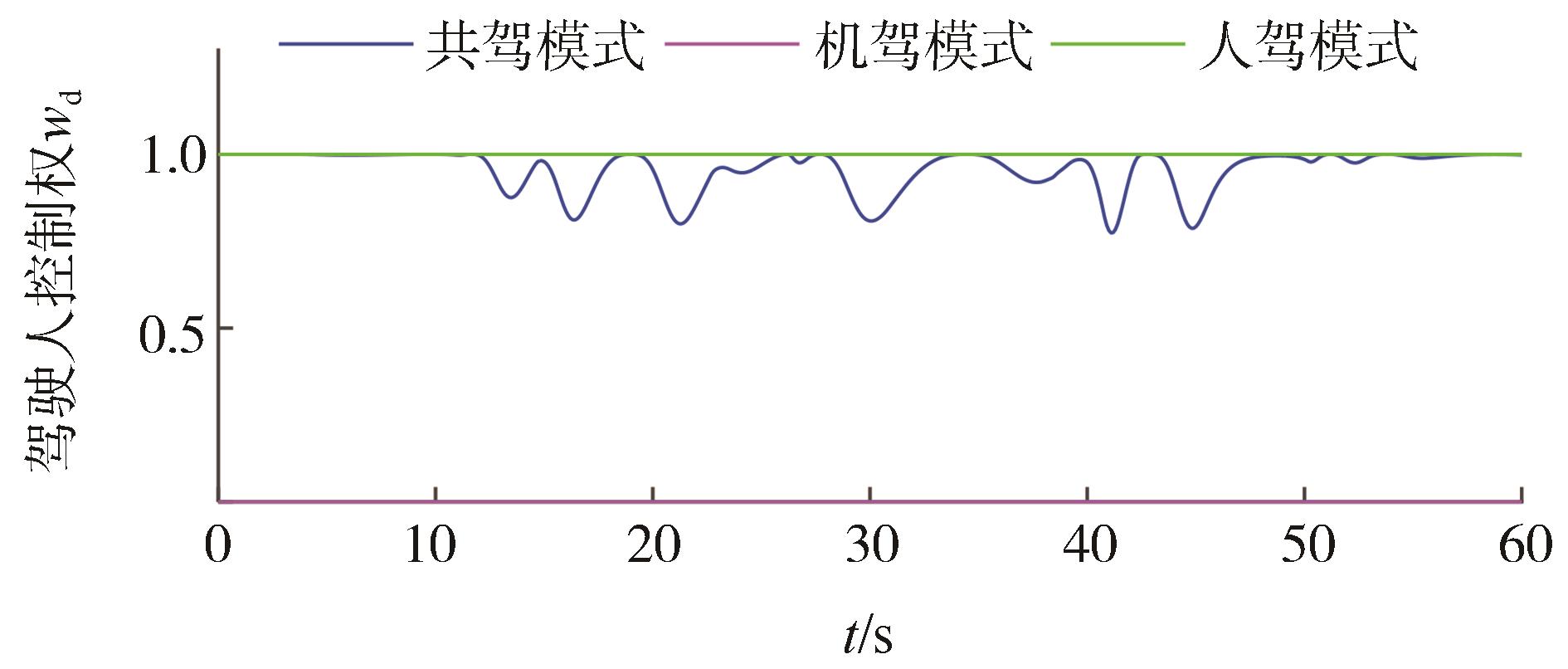
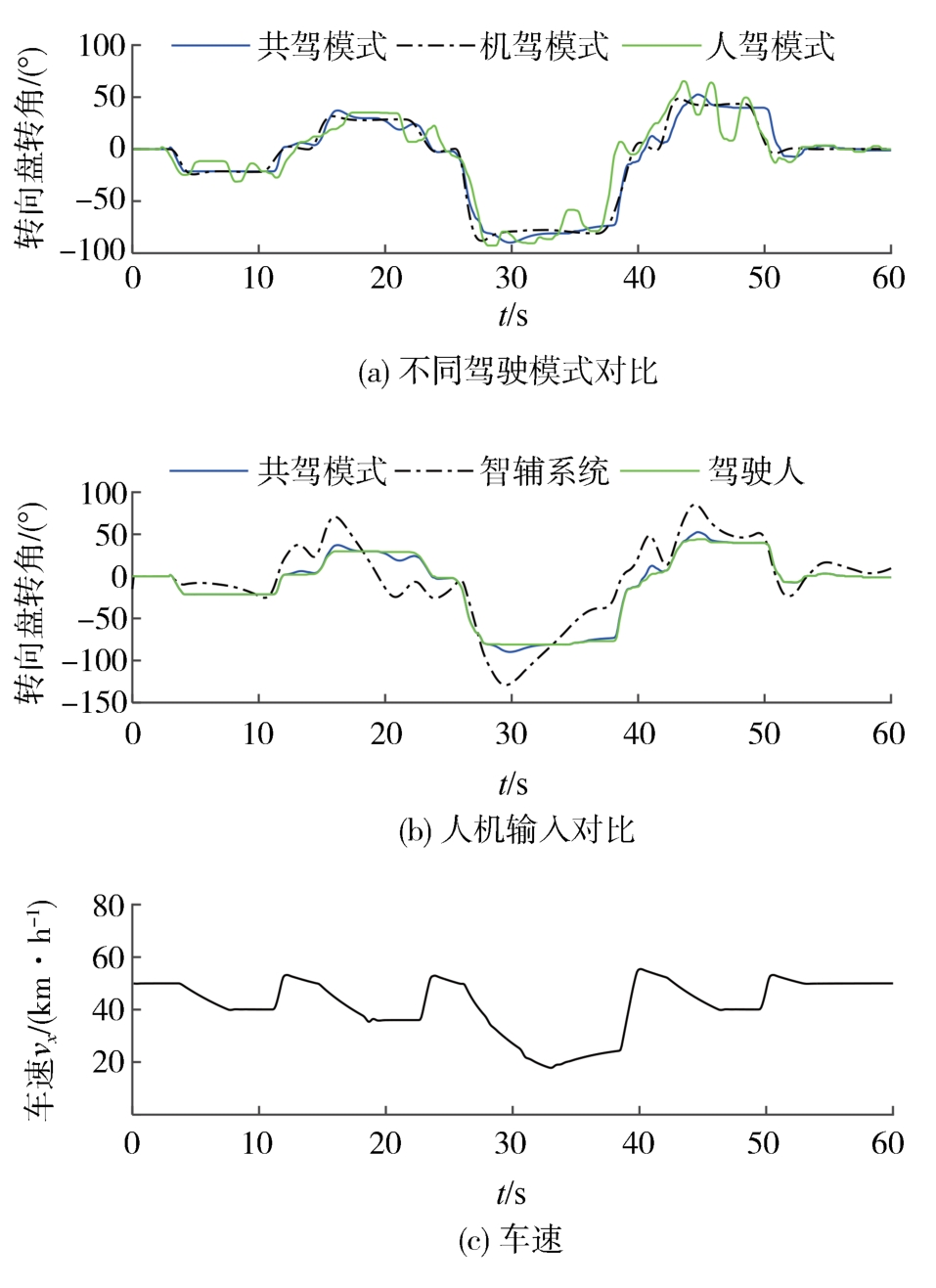
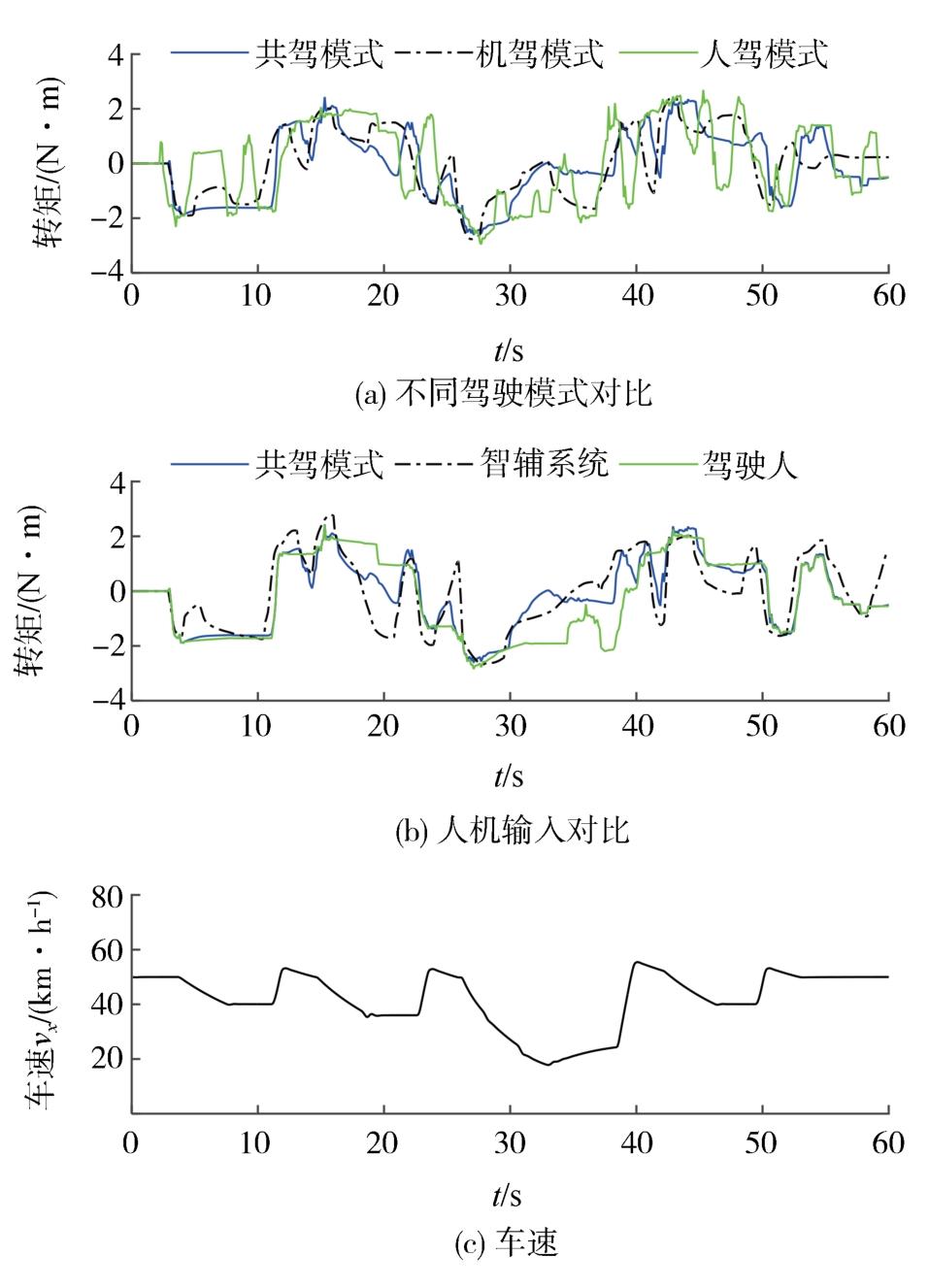
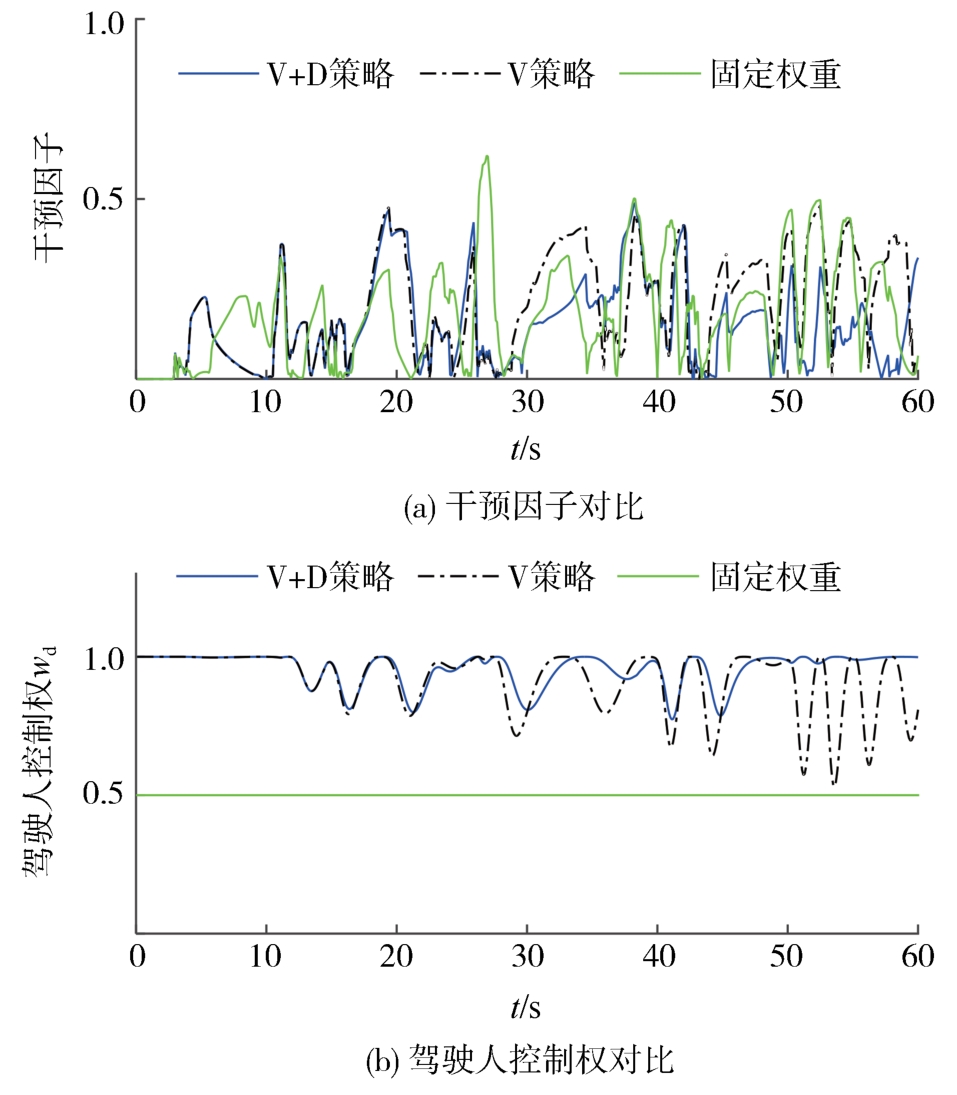
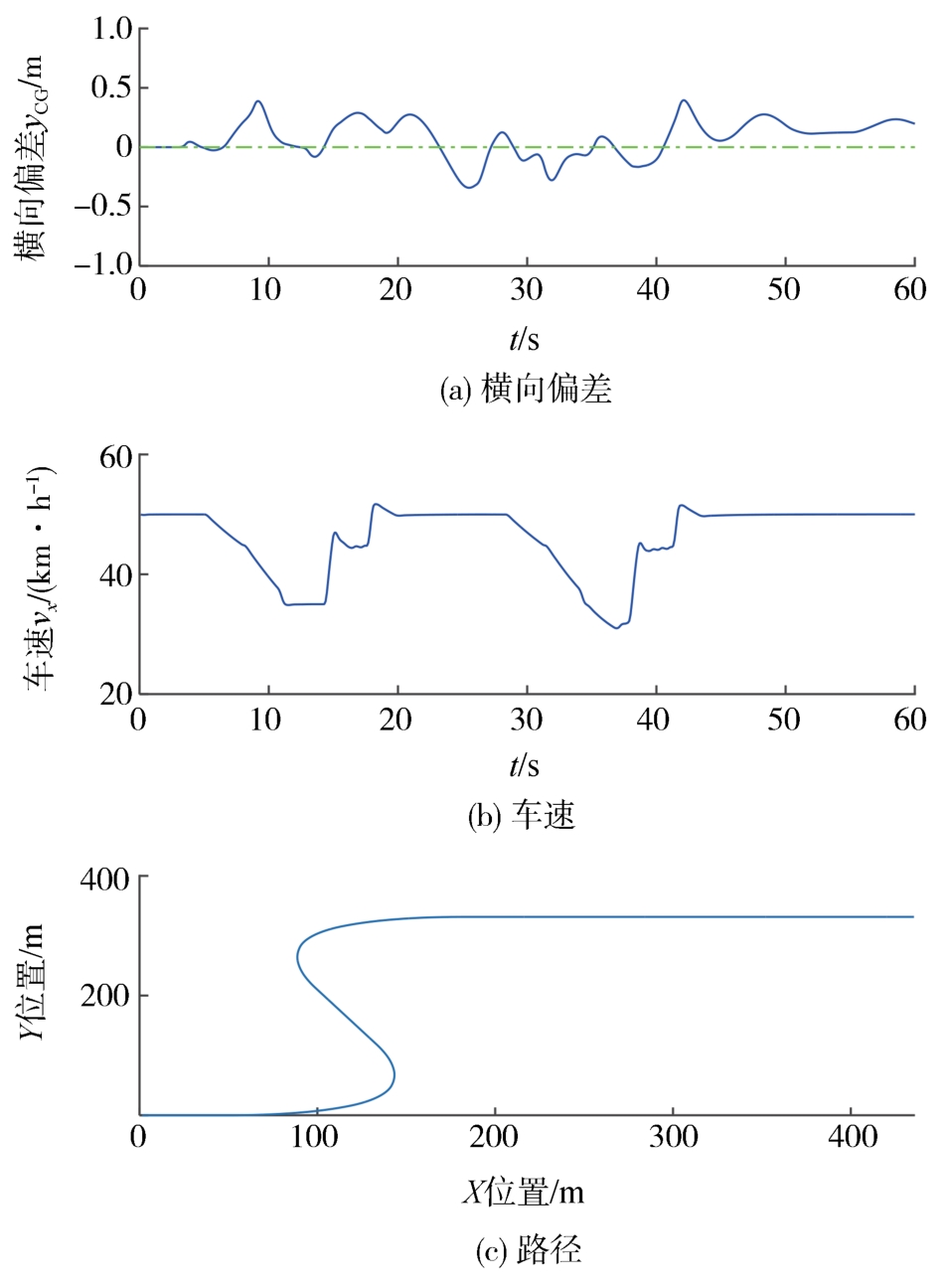
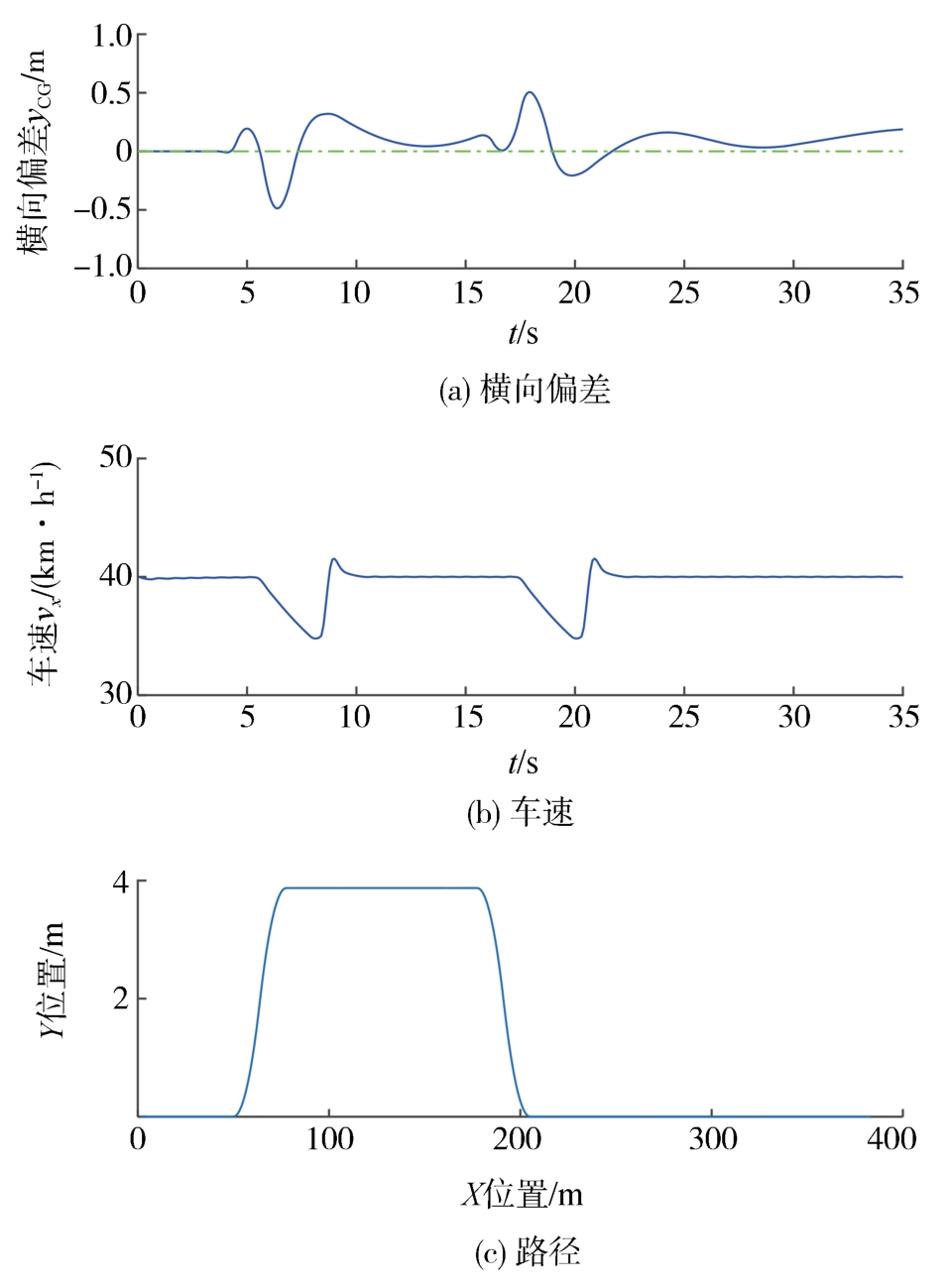
为更好地让共驾型车道保持控制系统能够预判驾驶人的转向行为,本文提出了一种间接式共驾型车道保持鲁棒控制算法。首先引入了仿驾驶人转向行为的驾驶人转向模型,并采用免疫遗传(immune genetic algorithm, IGA)算法对驾驶人转向模型参数进行离线辨识,建立了驾驶人在环的线性时变人-车-路模型;其次考虑到复杂工况下道路曲率扰动、线性模型适配不足的缺陷以及模型参数的时变特性等因素,基于T-S模糊控制理论设计了输出反馈