汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1744-1754.doi: 10.19562/j.chinasae.qcgc.2024.10.003
陈潇凯1( ),陈丰1,刘向2,刘宏宇1,王笑宇1
),陈丰1,刘向2,刘宏宇1,王笑宇1
Xiaokai Chen1(),Feng Chen1,Xiang Liu2,Hongyu Liu1,Xiaoyu Wang1
摘要:
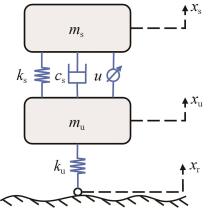
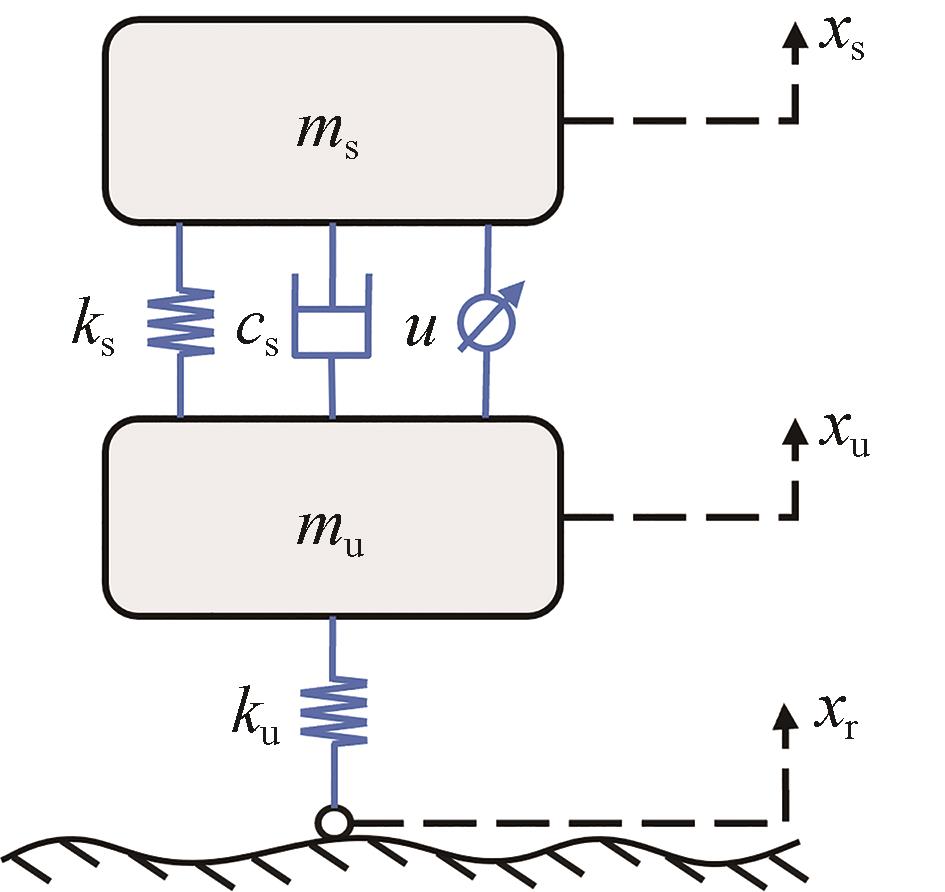
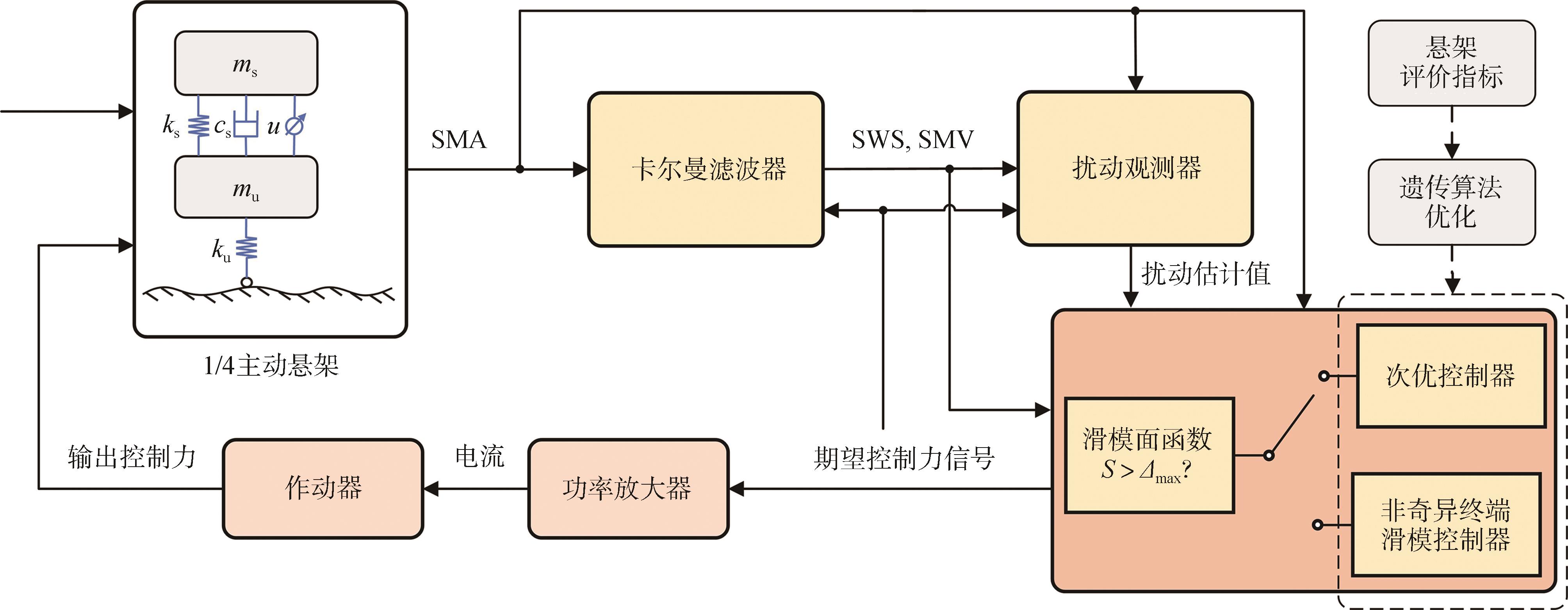
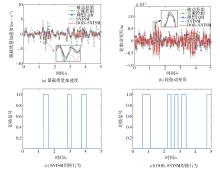
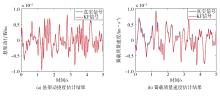
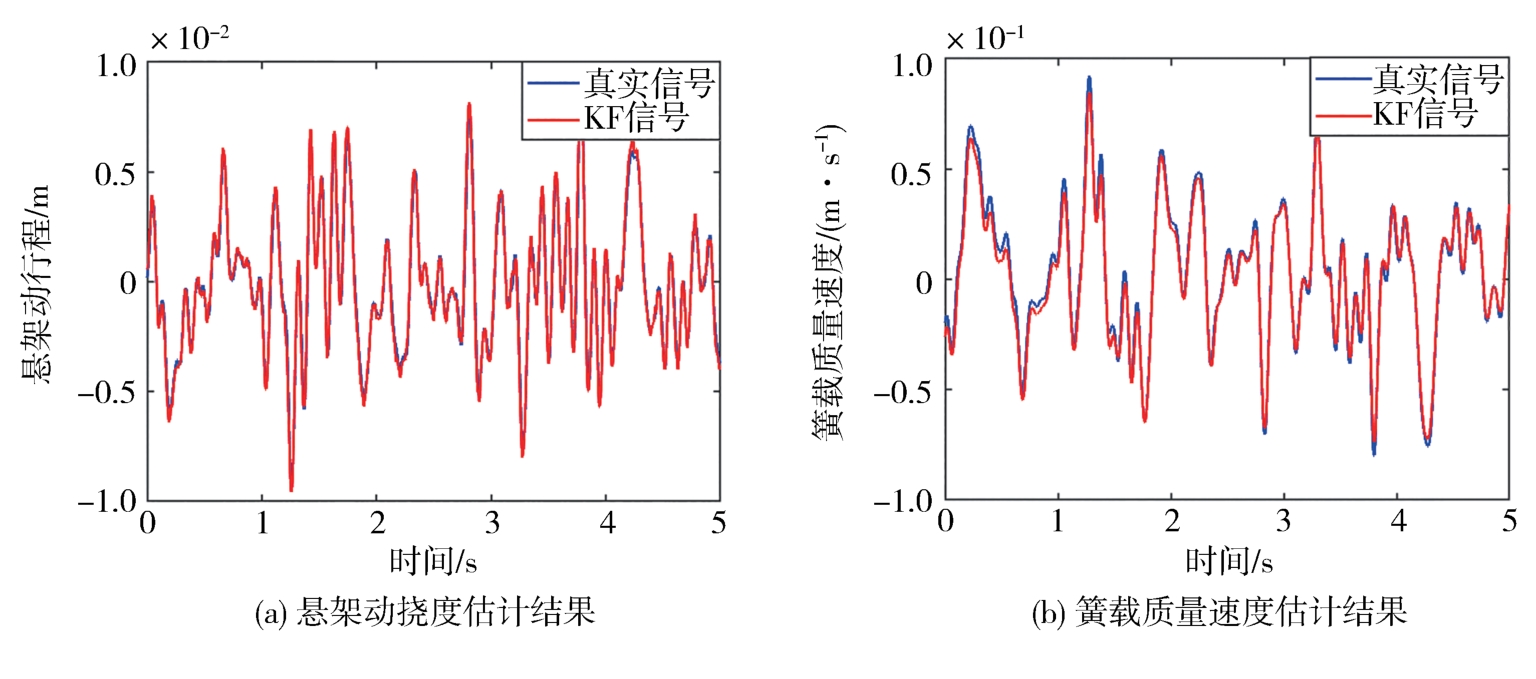
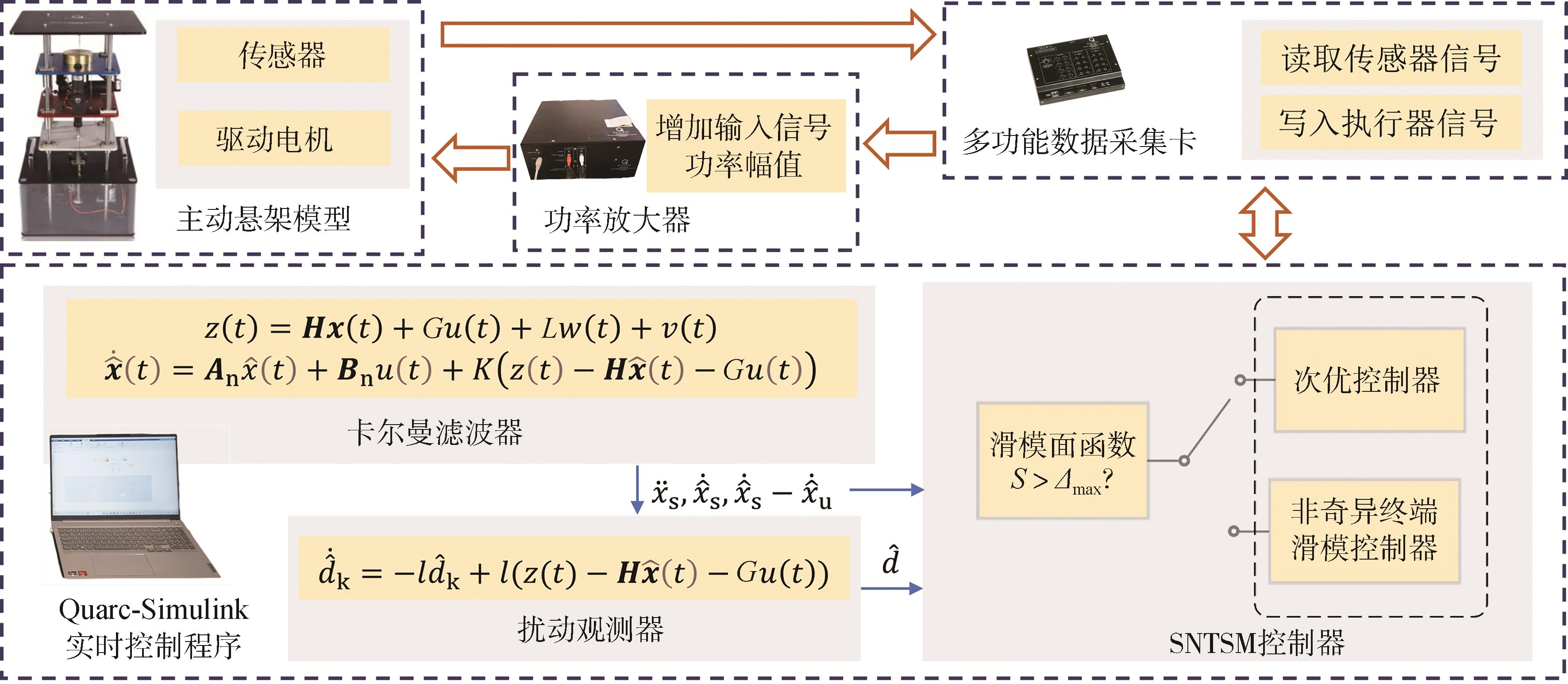
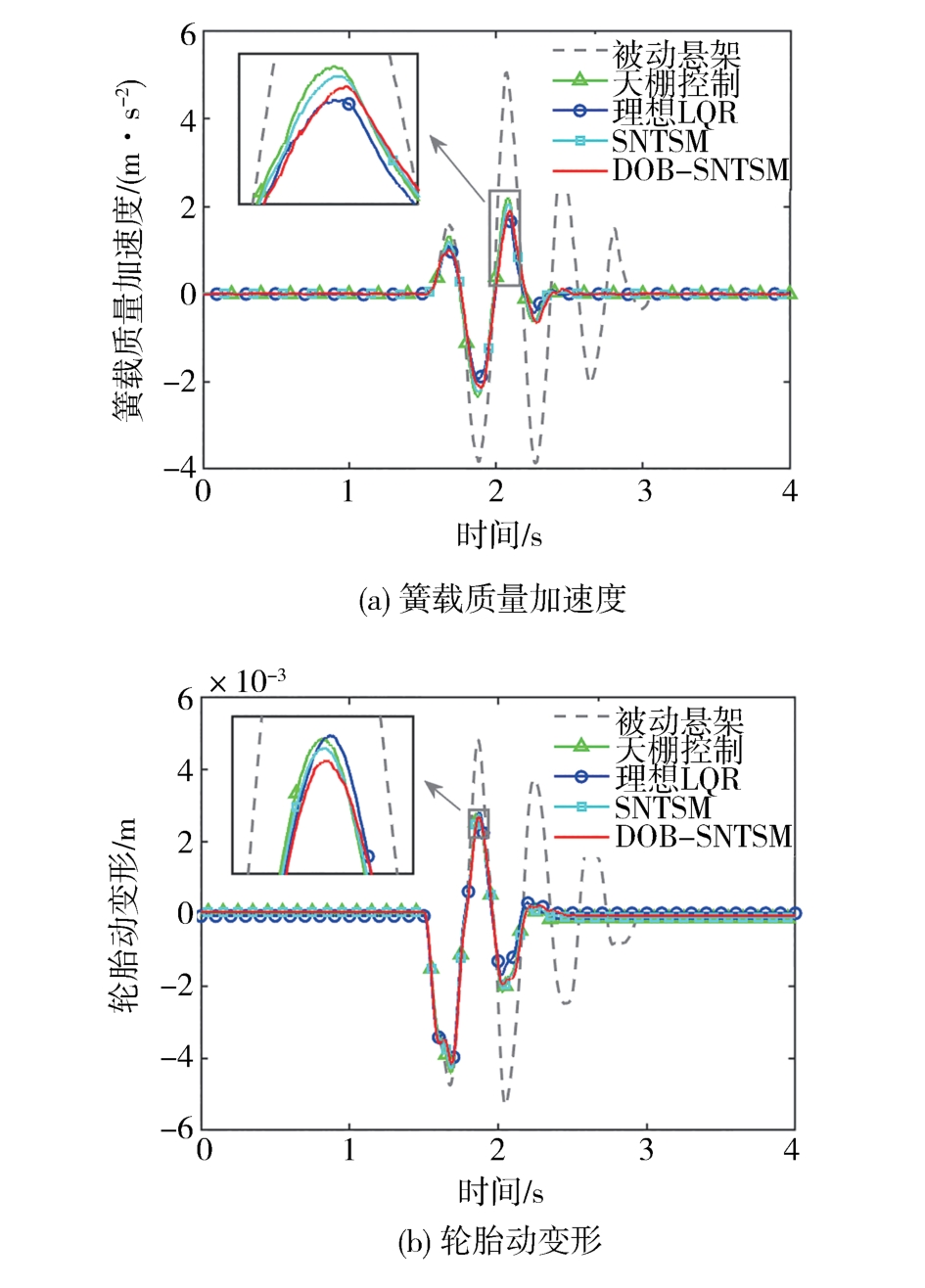
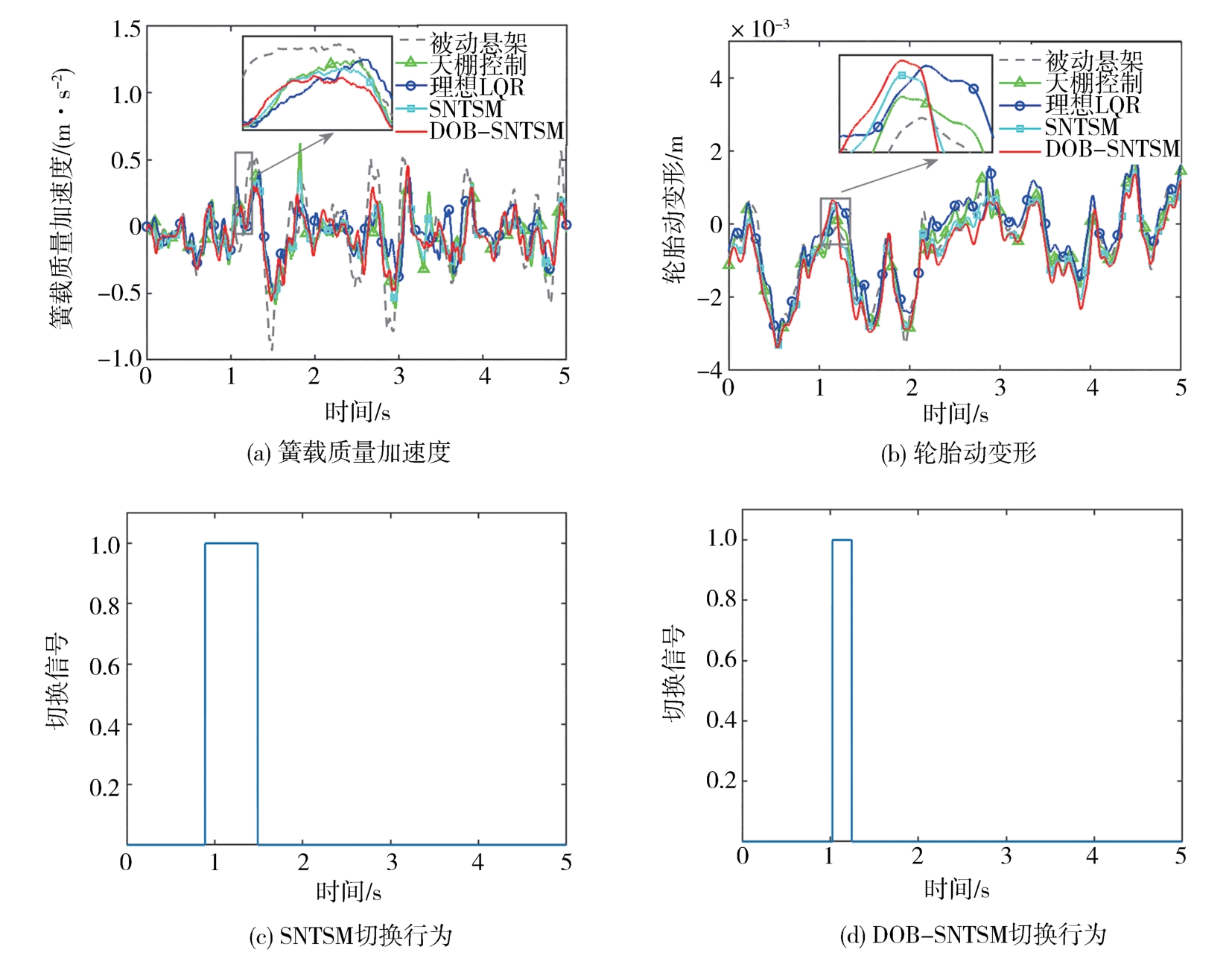
悬架控制需要实现乘坐舒适性和操纵稳定性之间的良好折中,此外还需要考虑系统的不确定性,是一项复杂的任务。本文以兼顾悬架的动力学性能指标、算法鲁棒性与成本因素为出发点,提出了一种基于扰动观测器的次优-非奇异终端滑模切换控制算法(DOB-SNTSM)。首先,以簧载质量加速度信息为输入,通过卡尔曼滤波器设计,实现了悬架动挠度和簧载质量速度的有效估计。然后,针对悬架系统中的不确定项估计,设计了一种扰动观测器,并将扰动估计值作为前馈补偿。接下来,以滑模面函数为依据,提出了一种次优-非奇异终端滑模切换控制算法,并与扰动观测器的前馈补偿相结合,共同构成一种新的主动悬架控制策略。最后,分别进行了凸包路面和平稳随机路面下的仿真和台架试验验证,结果表明,扰动观测器的引入能显著提升悬架的乘坐舒适性指标,相比经典的天棚控制、理想状态LQR方法、不带有扰动观测器的SNTSM算法,新算法不仅很好地实现各项悬架性能指标的均衡,而且能够仅利用簧载质量加速度信息就可以达到接近理想状态LQR的控制效果,同时,控制器切换方案可以显著提升算法鲁棒性。