汽车工程 ›› 2021, Vol. 43 ›› Issue (5): 650-656.doi: 10.19562/j.chinasae.qcgc.2021.05.002
肖汉彪1,2,胡钊政1,2( ),周哲2,3,伍锦祥1,2
),周哲2,3,伍锦祥1,2
Hanbiao Xiao1,2,Zhaozheng Hu1,2(),Zhe Zhou2,3,Jinxiang Wu1,2
摘要:
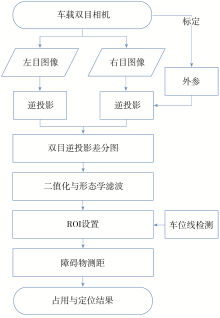
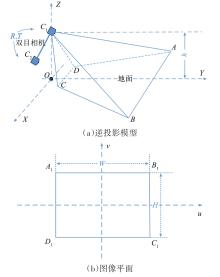
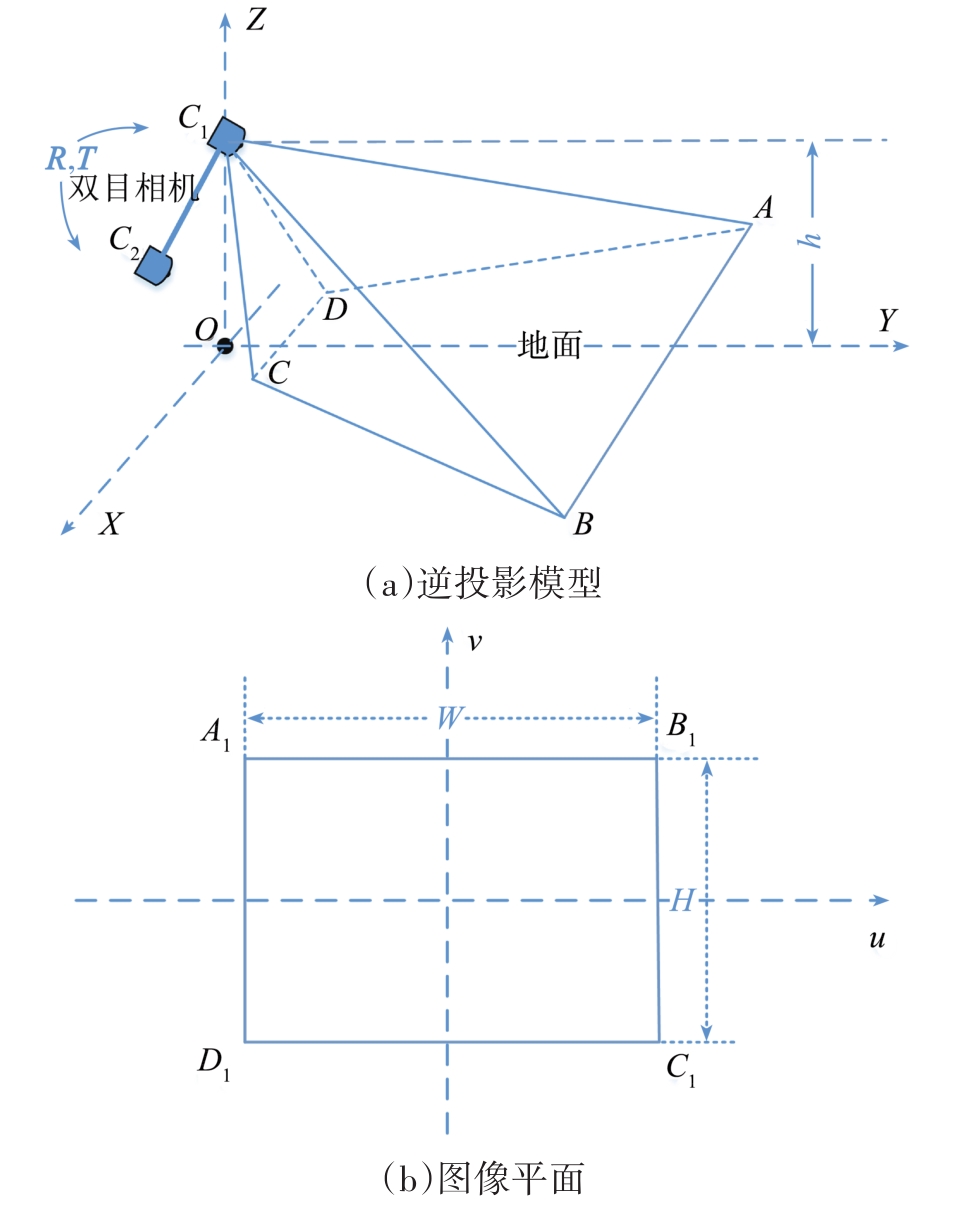
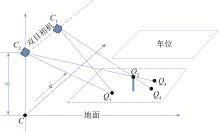
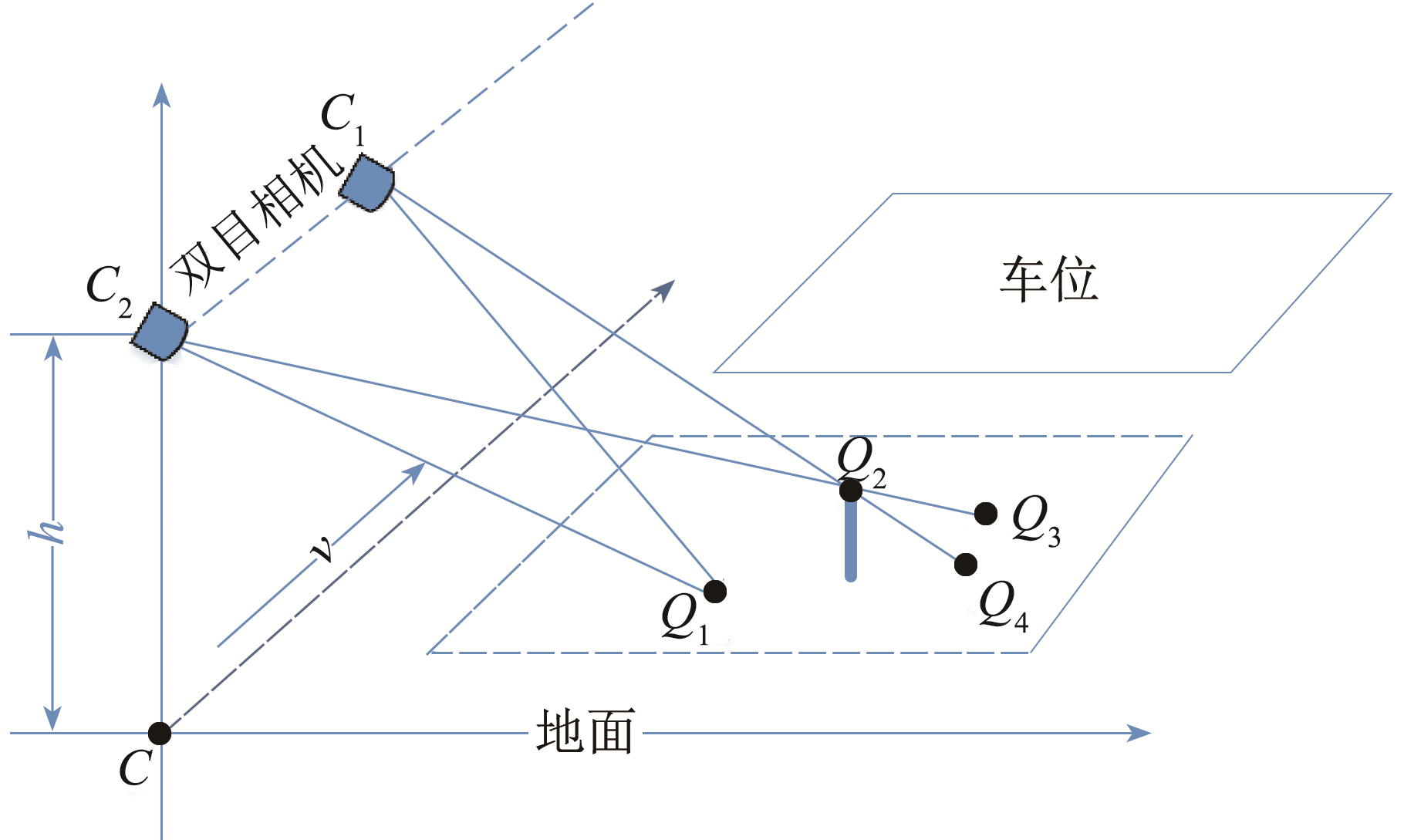
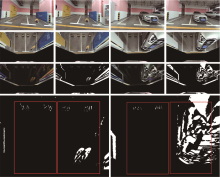
本文中提出了一种基于双目逆投影变换的停车位快速检测与定位方法。首先,通过逆投影变换将双目相机获取的两张图像投影到参考平面,生成两个新视图,即双目逆投影图,并利用其差分图来区分平面上与平面外的目标;随后,通过对差分图进行阈值化与滤波来实现障碍物的快速检测;同时,障碍物的位置也可从参考平面获取。与现有方法相比,该方法不需要明确的目标检测或三维重建,仅利用基本的图像变换实现停车位的快速检测与障碍物定位。在地下停车场与室外停车场环境下,利用智能车搭载的双目摄像机采集数据对本文算法进行验证。试验结果表明,此方法能快速有效地检测和定位车位附近的动静态障碍物,例如路障、行人、车辆和车位锁等,检测速度达到18帧/s,识别准确率高于95.0%,在算法效率、准确率和定位精度方面均优于现有的检测方法。