汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1359-1371.doi: 10.19562/j.chinasae.qcgc.2022.09.007
所属专题: 智能网联汽车技术专题-规划&控制2022年
胡满江1,2,卜令坤1,秦洪懋1,2( ),周岩3,边有钢1,2,孙宁1,郑讯佳4
),周岩3,边有钢1,2,孙宁1,郑讯佳4
收稿日期:2021-12-28
修回日期:2022-01-26
出版日期:2022-09-25
发布日期:2022-09-21
通讯作者:
秦洪懋
E-mail:qinhongmao@vip.sina.com
基金资助:
Manjiang Hu1,2,Lingkun Bu1,Hongmao Qin1,2(),Yan Zhou3,Yougang Bian1,2,Ning Sun1,Xunjia Zheng4
Received:2021-12-28
Revised:2022-01-26
Online:2022-09-25
Published:2022-09-21
Contact:
Hongmao Qin
E-mail:qinhongmao@vip.sina.com
摘要:
本文研究了多类时延下同时具有人类驾驶车辆(HDV)和网联自动驾驶车辆(CAV)的混合车辆队列建模与协同控制方法。首先构建了一般形式的混合车辆队列系统模型,对CAV的数量与空间分布进行表征,并将驾驶员反应时延引入模型;接着,考虑V2V通信时延和传感器量测时延,设计了状态反馈控制器;推导了闭环系统特征方程,并根据Routh-Hurwitz判据确定了系统闭环稳定性的充分条件,以指导控制器参数设计;最后,通过数值仿真验证了控制器设计的有效性,定量展示了CAV对衰减交通波动的作用,并分析了各类时延对交通流波动的影响。
胡满江,卜令坤,秦洪懋,周岩,边有钢,孙宁,郑讯佳. 多类时延下混合车辆队列建模与协同控制[J]. 汽车工程, 2022, 44(9): 1359-1371.
Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay[J]. Automotive Engineering, 2022, 44(9): 1359-1371.

图1
混合车辆队列"
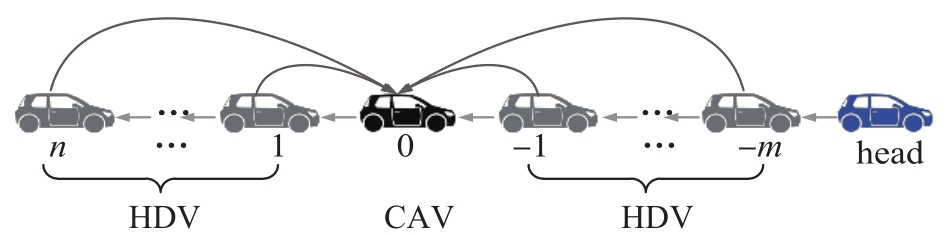
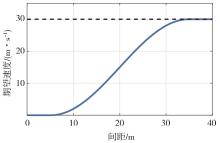
图2
OVM模型中函数Vs的曲线"
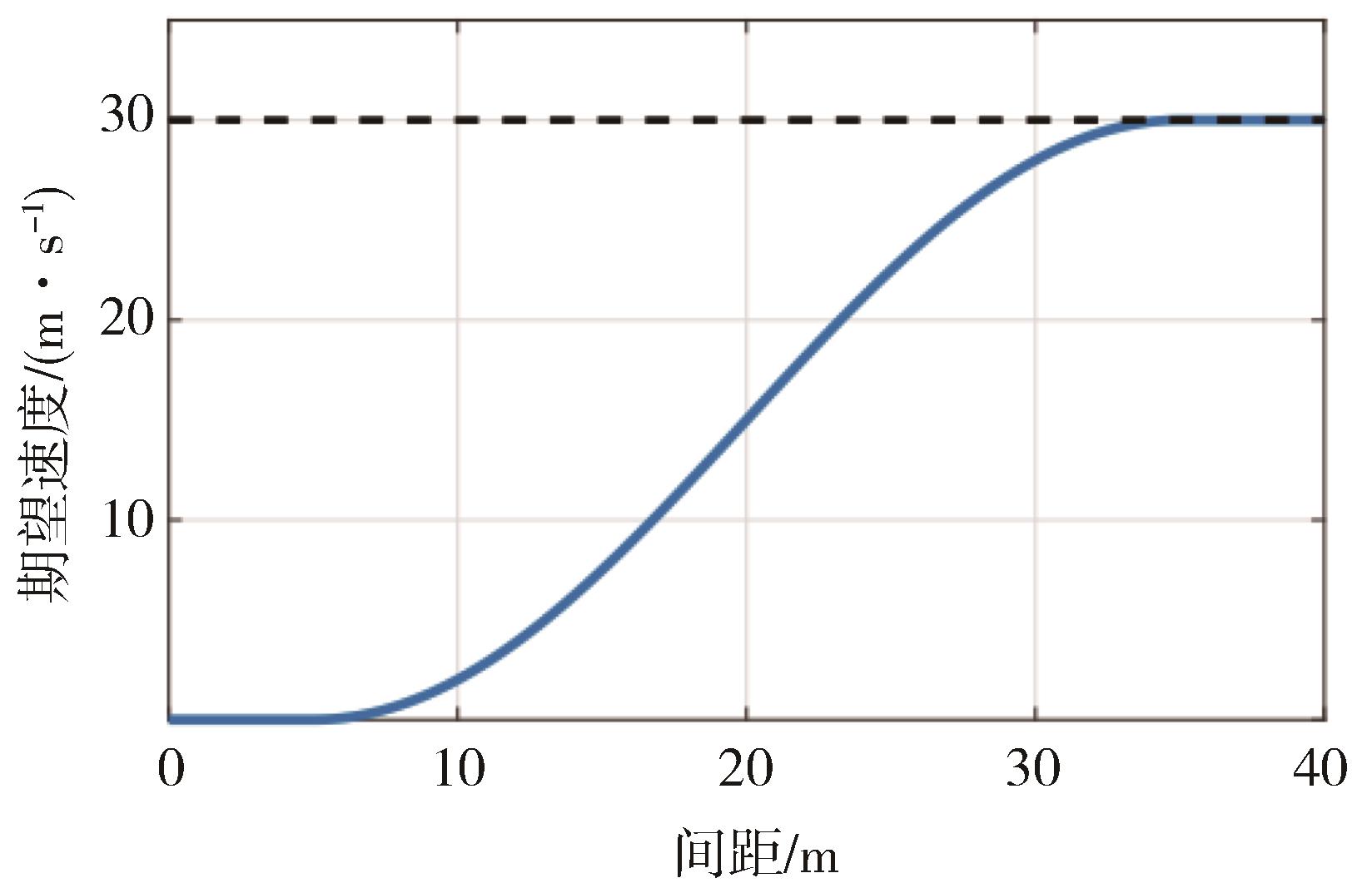

图3
数值仿真试验场景"

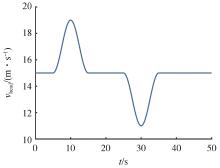
图4
领航车速度轨迹图"
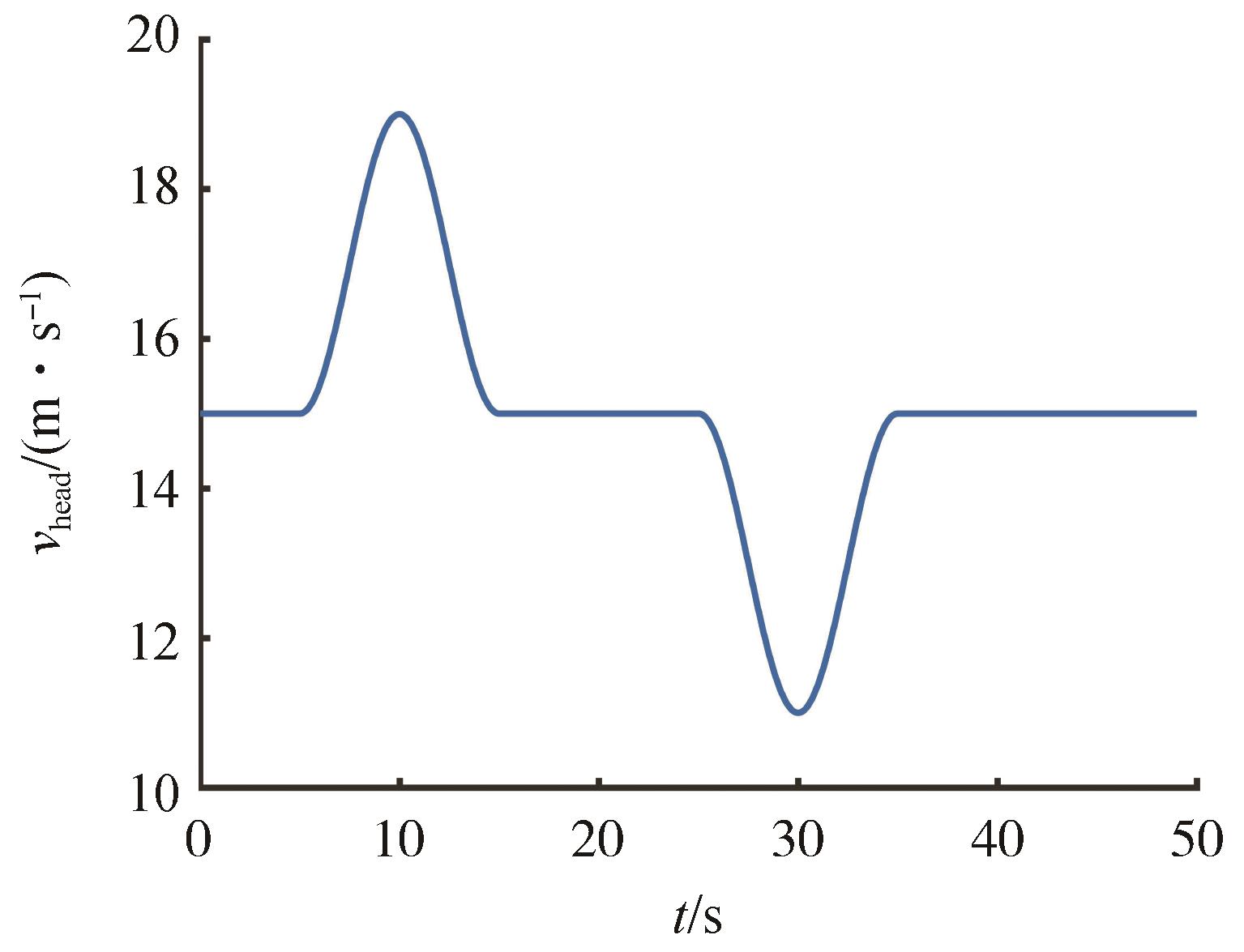

图5
场景1不含CAV的12辆HDV队列行驶误差"


图6
场景2混合车辆队列行驶误差对比"
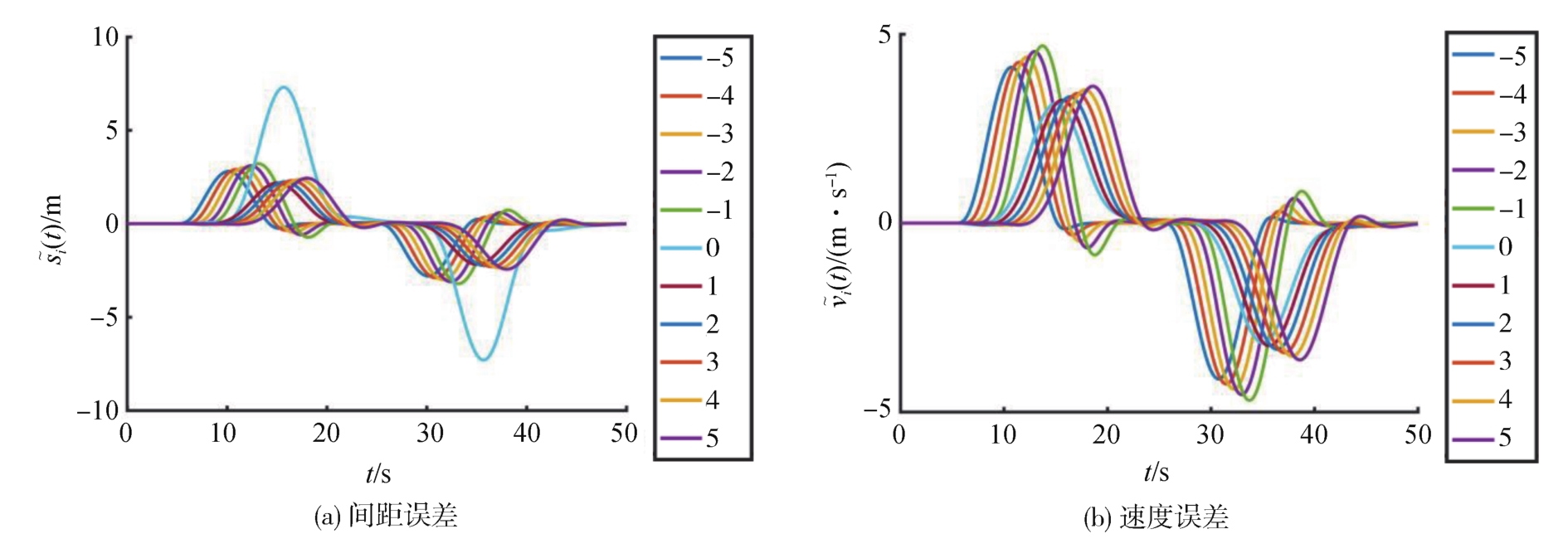
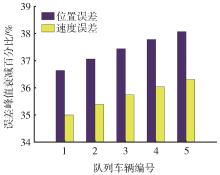
图7
场景2 CAV后的1~5号车位置和速度误差峰值衰减百分比"
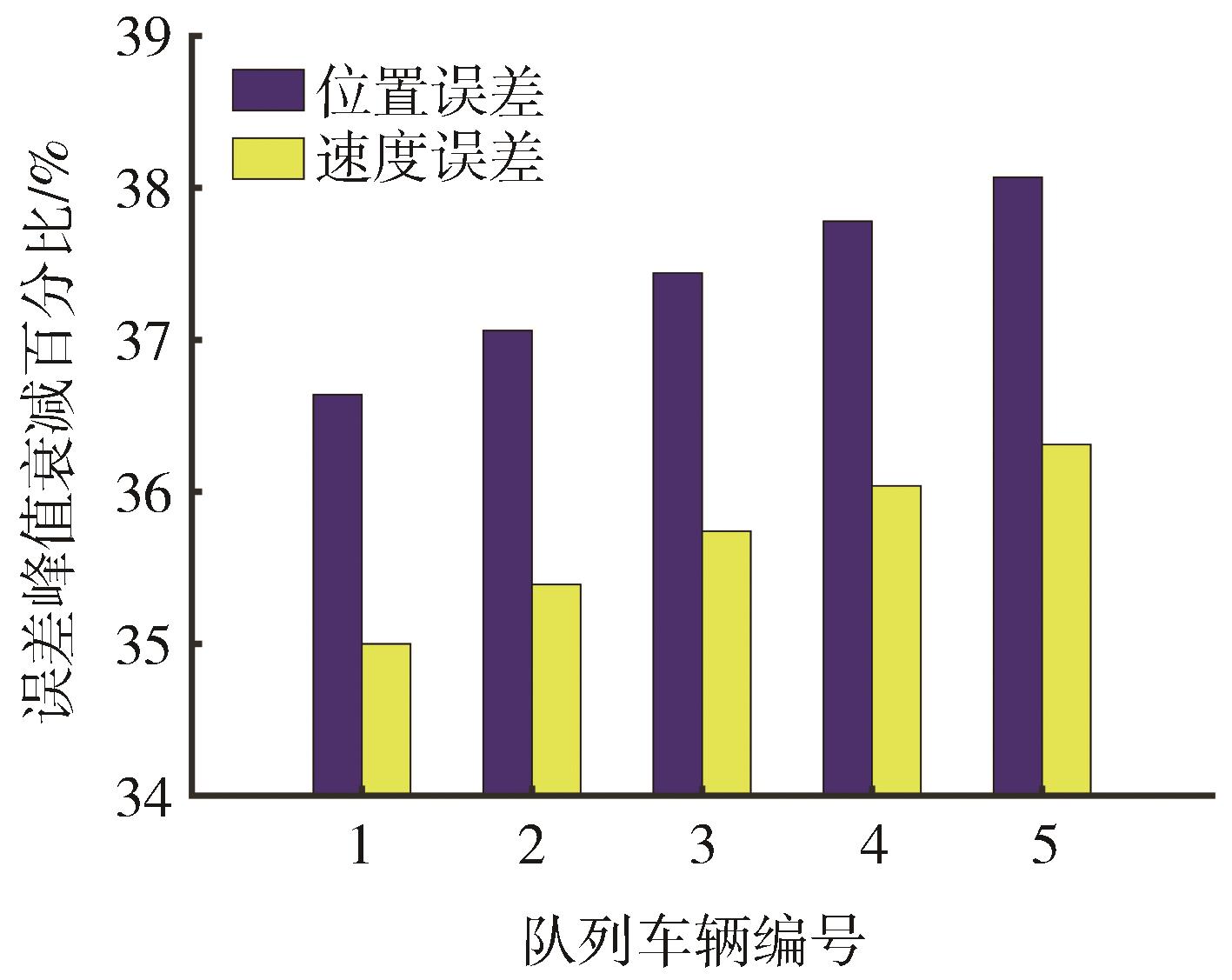

图8
场景3混合车辆队列行驶误差"
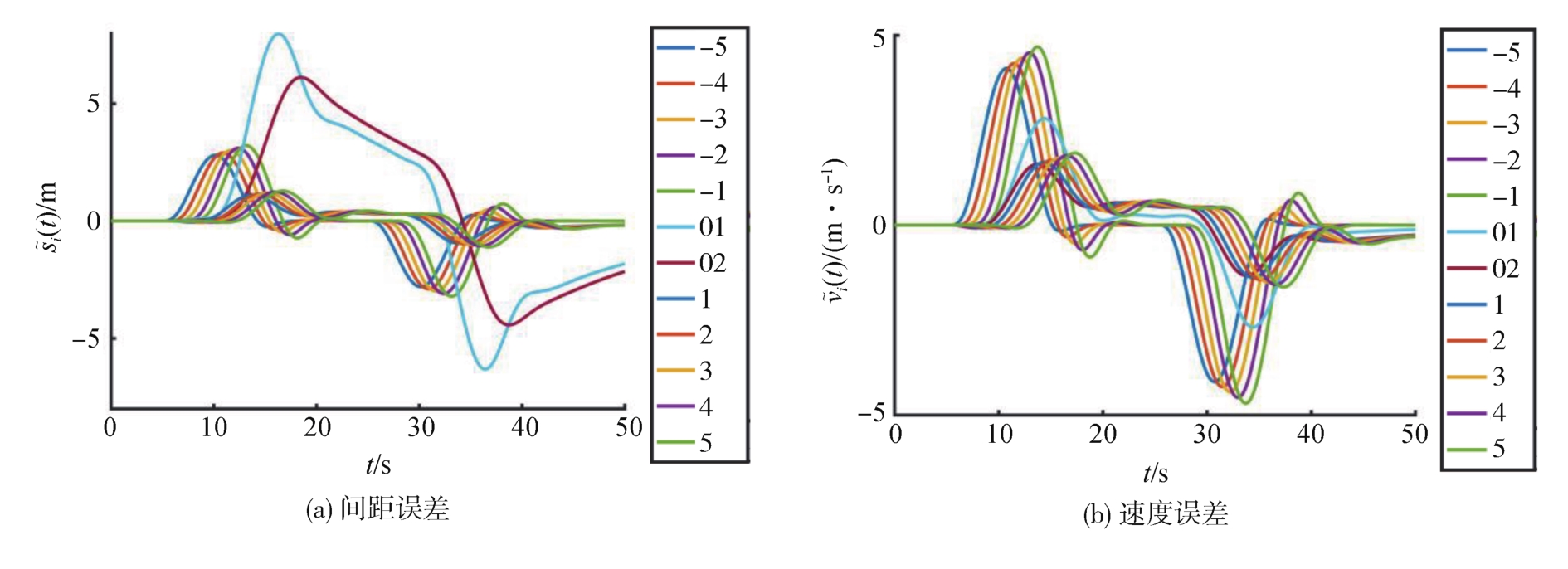
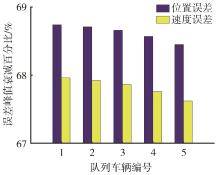
图9
场景3 CAV后的1~5号车位置和速度误差峰值衰减百分比"
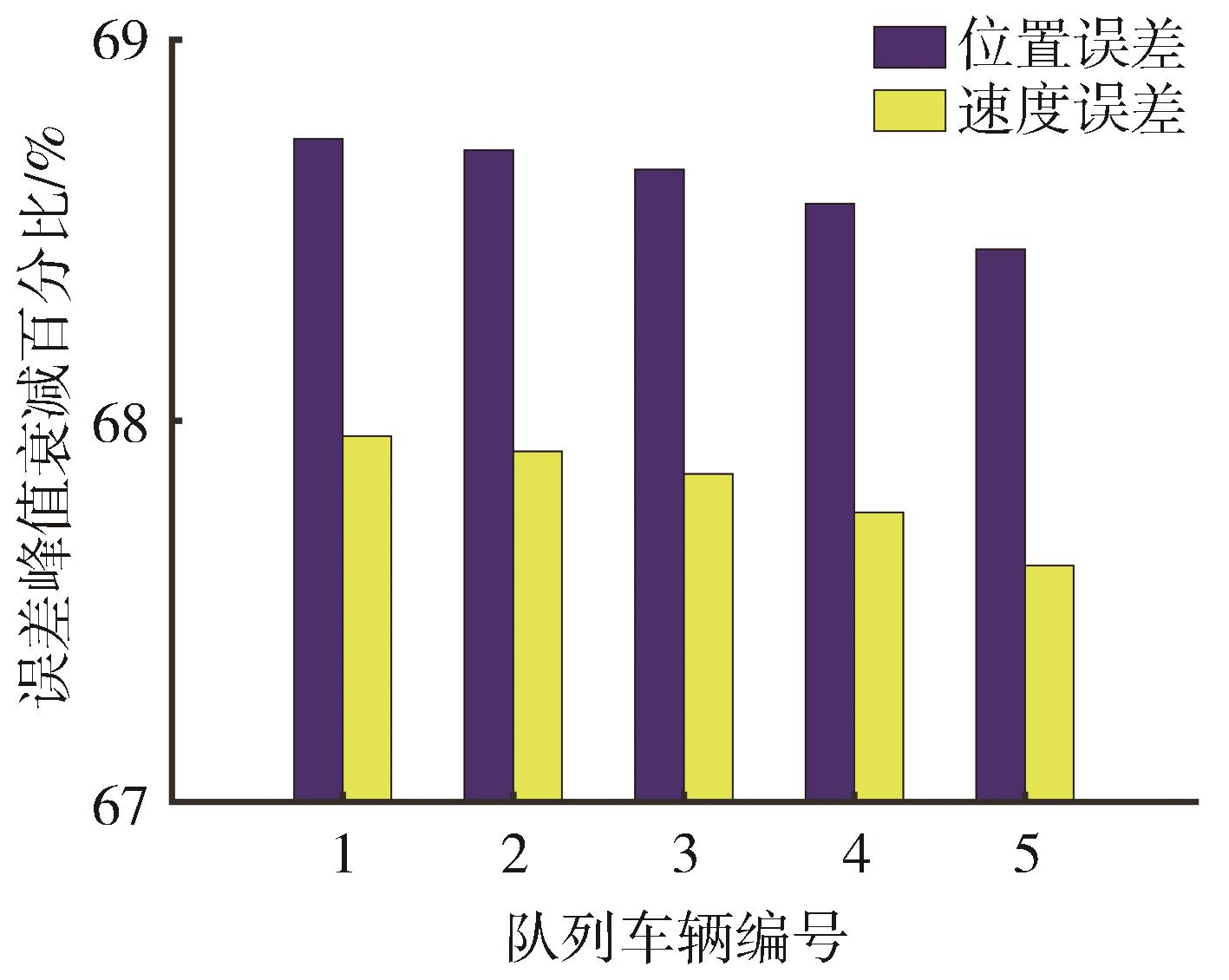
图10
CAV后的1~5号车速度误差峰值随μ和σ的变化"


图11
AGV试验平台"

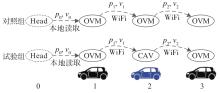
图12
基于OVM的混合车辆队列对比试验方案设计"

图13
基于OVM的混合车辆队列对比试验"
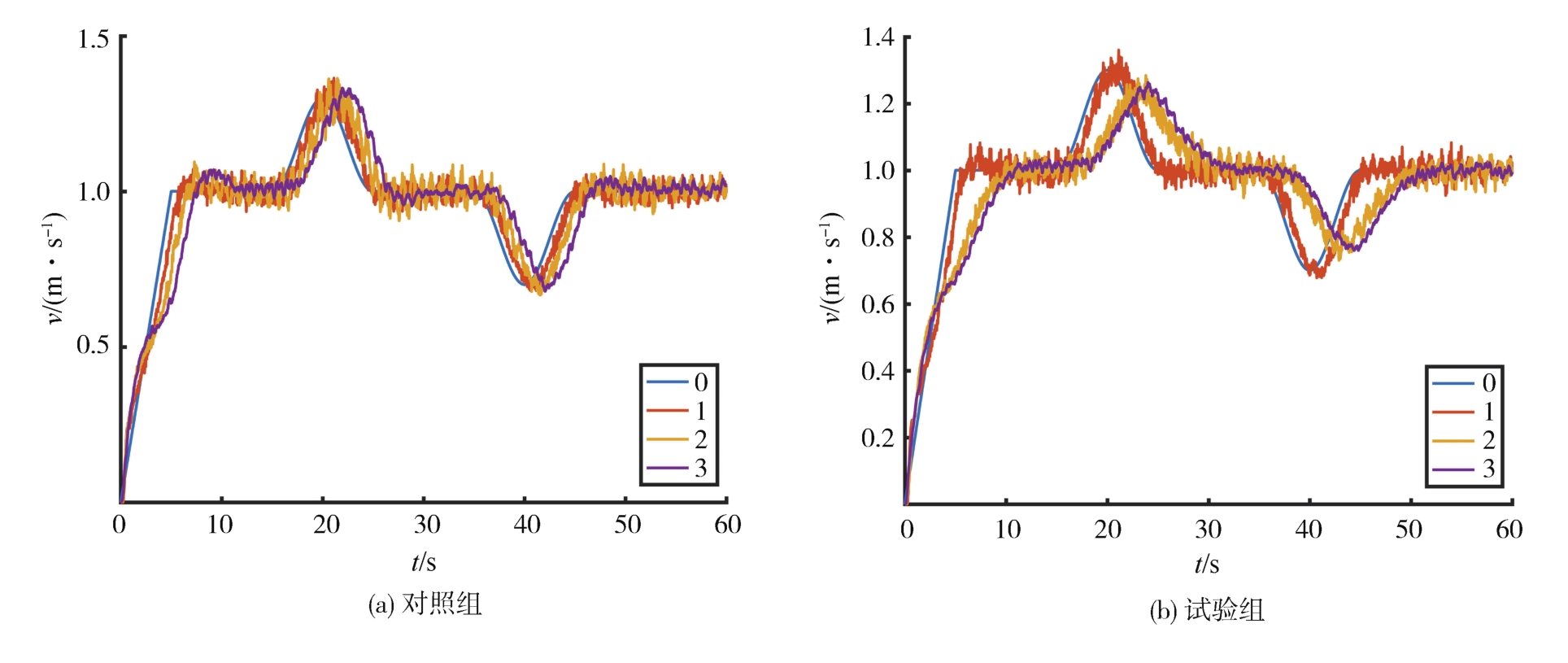
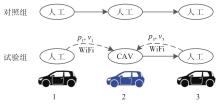
图14
基于人工控制的混合车辆队列对比试验方案设计"
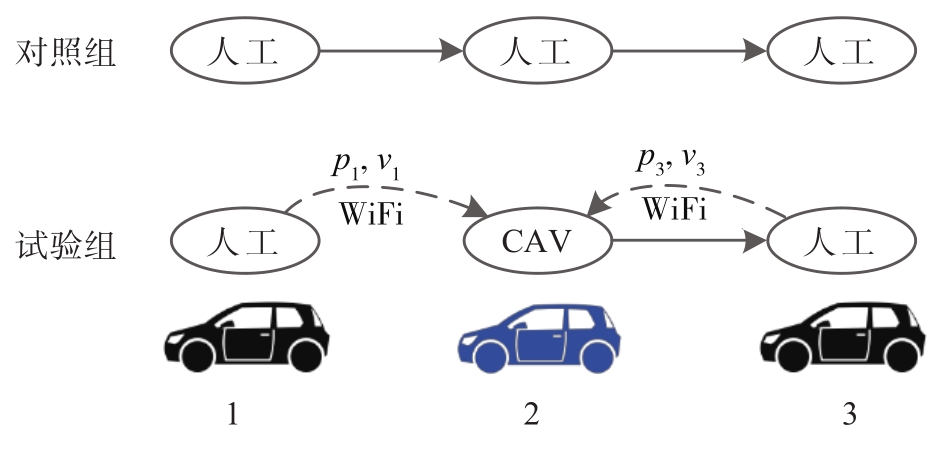

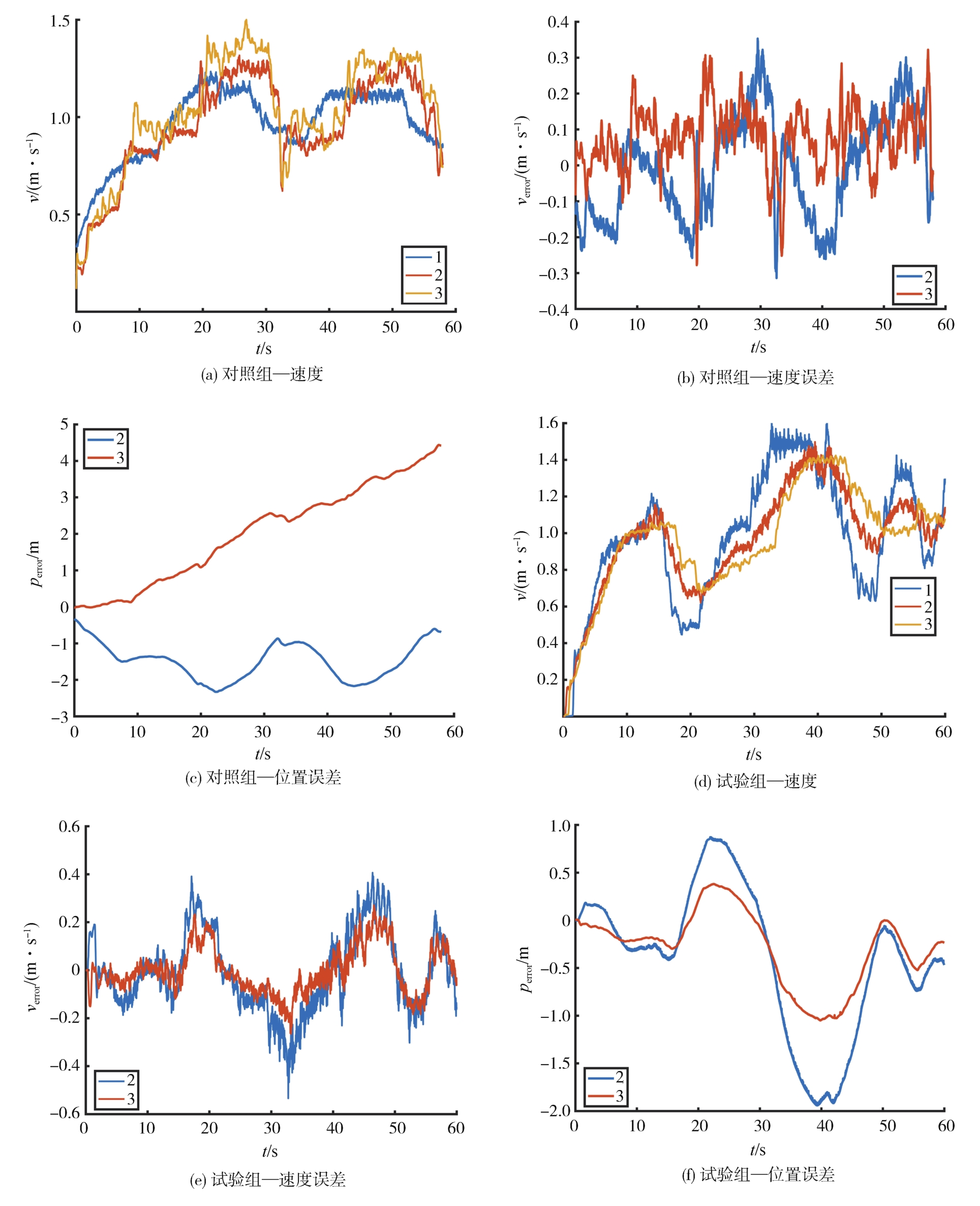
图15
基于真实人类驾驶的混合车辆队列对比试验"
| 1 | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI K, DAI Y, LI S, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Automotive Safety and Energy, 2017, 8(1): 1-14. | |
| 2 | TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. |
| 3 | XU B, BAN X J, BIAN Y, et al. Cooperative method of traffic signal optimization and speed control of connected vehicles at isolated intersections[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1390-1403. |
| 4 | LIANG K Y, MÅRTENSSON J, JOHANSSON K H. Heavy-duty vehicle platoon formation for fuel efficiency[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 1051-1061. |
| 5 | BIAN Y, ZHENG Y, REN W, et al. Reducing time headway for platooning of connected vehicles via V2V communication[J]. Transportation Research Part C: Emerging Technologies, 2019, 102: 87-105. |
| 6 | 郑洋. 基于四元素构架的车辆队列动力学建模与分布式控制[D]. 北京:清华大学, 2015. |
| ZHENG Y. Dynamic modeling and distributed control of vehicular platoon under the four-component framework[D]. Beijing: Tsinghua University, 2015. | |
| 7 | ZHENG Y, EBEN LI S, WANG J, et al. Stability and scalability of homogeneous vehicular platoon: study on the influence of information flow topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 14-26. |
| 8 | LI S E, QIN X, LI K, et al. Robustness analysis and controller synthesis of homogeneous vehicular platoons with bounded parameter uncertainty[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 1014-1025. |
| 9 | 秦晓辉, 王建强, 谢伯元, 等. 非匀质车辆队列的分布式控制[J]. 汽车工程, 2017, 39(1): 73-78,106. |
| QIN X, WANG J, XIE B, et al. Distributed control of heterogeneous vehicular platoons[J]. Automotive Engineering, 2017, 39(1): 73-78,106. | |
| 10 | GUO G, LI P, HAO L. Adaptive fault-tolerant control of platoons with guaranteed traffic flow stability[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 6916-6927. |
| 11 | GUO G, LI D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7511-7520. |
| 12 | XU L, ZHUANG W, YIN G, et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance[J]. Transportation Research Part C: Emerging Technologies, 2019, 107: 34-53. |
| 13 | XIAO L, GAO F. Practical string stability of platoon of adaptive cruise control vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194. |
| 14 | 杨泽宇, 黄晋, 胡展溢, 等. 严格避撞的车辆队列分布式鲁棒控制[J]. 汽车工程, 2020, 42(10): 1312-1319. |
| YANG Z, HUANG J, HU Z, et al. Distributed robust control of vehicle platoon for strict collision avoidance[J]. Automotive Engineering, 2020, 42(10): 1312-1319. | |
| 15 | 鲁若宇, 胡杰, 陈瑞楠, 等. 基于DMPC的智能汽车协同式自适应巡航控制[J]. 汽车工程, 2021, 43(8): 1177-1186. |
| LU R, HU J, CHEN R, et al. Cooperative adaptive cruise control of intelligent vehicles based on DMPC [J]. Automotive Engineering, 2021, 43(8): 1177-1186. | |
| 16 | GHASEMI A, KAZEMI R, AZADI S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4299-4308. |
| 17 | HU J, BHOWMICK P, ARVIN F, et al. Cooperative control of heterogeneous connected vehicle platoons: an adaptive leader-following approach[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 977-984. |
| 18 | 马芳武, 王佳伟, 杨昱, 等. 网联车辆协同编队控制系统研究[J]. 汽车工程, 2020, 42(7): 860-866,873. |
| MA F, WANG J, YANG Y, et al. Research on networked-vehicle cooperative platoon control system[J]. Automotive Engineering, 2020, 42(7): 860-866,873. | |
| 19 | LI K, BIAN Y, LI S, et al. Distributed model predictive control of multi-vehicle systems with switching communication topologies[J]. Transportation Research Part C: Emerging Technologies, 2020, 118: 102717. |
| 20 | BIAN Y, DU C, HU M, et al. Fuel economy optimization for platooning vehicle swarms via distributed economic model predictive control[J]. IEEE Transactions on Automation Science and Engineering, 2021: 1-13. |
| 21 | ZHENG Y, WANG J, LI K. Smoothing traffic flow via control of autonomous vehicles[J]. IEEE Internet of Things Journal, 2020, 7(5): 3882-3896. |
| 22 | 胡笳, 安连华, 李欣. 面向新型混合交通流的快速路合流区通行能力建模[J]. 交通信息与安全, 2021, 39(1): 137-144. |
| HU J, AN L, LI X. A capacity model of freeway merging areas with partially connected automated traffic[J]. Journal of Transport Information and Safety, 2021, 39(1): 137-144. | |
| 23 | 李永福, 邬昌强, 朱浩, 等. 考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制[J]. 自动化学报, 2021, 47(9): 2264-2275. |
| LI Y, WU C, ZHU H, et al. Trajectory tracking control for connected vehicle platoon considering car-following interactions and time delays[J]. Acta Automatica Sinica, 2021, 47(9): 2264-2275. | |
| 24 | 李永福, 何昌鹏, 朱浩, 等. 通信延时环境下异质网联车辆队列非线性纵向控制[J]. 自动化学报, 2021, 47(12): 2841-2856. |
| LI Y, HE C, ZHU H, et al. Nonlinear longitudinal control for heterogeneous connected vehicle platoon in the presence of communication delays[J]. Acta Automatica Sinica, 2021, 47(12): 2841-2856. | |
| 25 | 杨依琳, 边有钢, 胡满江, 等. 混合交通环境车辆队列协同控制[J]. 控制与信息技术, 2021(1): 9-16. |
| YANG Y, BIAN Y, HU M, et al. Cooperative control of vehicular platoon in mixed traffic environment[J]. Control and Information Technology, 2021(1): 9-16. | |
| 26 | DI BERNARDO M, SALVI A, SANTINI S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 102-112. |
| 27 | WU C, LI Y, LI Y. Trajectory tracking control for connected vehicle platoon considering time delays[C]. 2018 Chinese Automation Congress (CAC). |
| 28 | GE J I, OROSZ G. Optimal control of connected vehicle systems with communication delay and driver reaction time[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 2056-2070. |
| 29 | GAO F, LI S E, ZHENG Y, et al. Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay[J]. IET Intelligent Transport Systems, 2016, 10(7): 503-513. |
| 30 | ELAHI A, ALFI A, MODARES H. H∞ consensus control of discrete-time multi-agent systems under network imperfections and external disturbance[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 667-675. |
| 31 | CUI S, SEIBOLD B, STERN R, et al. Stabilizing traffic flow via a single autonomous vehicle: possibilities and limitations[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). |
| 32 | ZHANG J, KNOSPE C R, TSIOTRAS P. New results for the analysis of linear systems with time-invariant delays[J]. International Journal of Robust and Nonlinear Control, 2003, 13(12): 1149-1175. |
| 33 | WANG J, ZHENG Y, CHEN C, et al. Leading cruise control in mixed traffic flow: system modeling, controllability, and string stability[J]. arXiv e-prints, 2020: arXiv:. |
| [1] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [2] | 钱立军,陈晨,陈健. 无信控交叉口环境下考虑驾驶员误差的集中式轨迹规划[J]. 汽车工程, 2023, 45(5): 768-776. |
| [3] | 李子先,潘世举,徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| [4] | 钟文沁,孔伟伟,李志恒,于杰,罗禹贡. 不同渗透率下非信控交叉路口混合预约多车协同控制[J]. 汽车工程, 2022, 44(8): 1144-1152. |
| [5] | 彭理群,王依婷,马育林,许述财. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153-1161. |
| [6] | 陈一鹤,孔伟伟,于杰,李克强,罗禹贡. 混合交通下非信控交叉口队列预约式控制[J]. 汽车工程, 2022, 44(7): 953-959. |
| [7] | 李鹏飞,罗禹贡,刘畅,孔伟伟. 智能网联车辆队列紧急工况控制策略设计[J]. 汽车工程, 2022, 44(3): 299-307. |
| [8] | 赵菲,王建,张天雷,王里,李德毅. 云控场景下车辆队列的模型预测控制方法[J]. 汽车工程, 2022, 44(2): 179-189. |
| [9] | 卢少波,谢菲菲,张博涵,陆嘉峰,李彩霞. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493. |
| [10] | 钱立军,陈健,吴冰,宣亮,陈晨,陈亮亮. 考虑驾驶员操作误差的混合动力汽车队列生态驾驶控制[J]. 汽车工程, 2021, 43(7): 1037-1045. |
| [11] | 刘阳,宗长富,郑宏宇,韩小健,张东,郭中阳. 基于参考向量场的车辆队列二维跟踪控制算法[J]. 汽车工程, 2021, 43(7): 962-970. |
| [12] | 赵祥模,张心睿,王润民,徐志刚,凡海金. 网联交叉口信号-车辆轨迹协同优化控制方法[J]. 汽车工程, 2021, 43(11): 1577-1586. |
| [13] | 杨秀建, 李金雨. 基于非线性模型预测控制的车辆纵向队列协调控制*[J]. 汽车工程, 2020, 42(2): 184-190. |
| [14] | 郭景华, 李文昌, 王靖瑶, 李克强. 智能电动汽车自适应巡航与再生制动多目标协同控制*[J]. 汽车工程, 2020, 42(12): 1638-1646. |
| [15] | 石佳, 罗禹贡, 齐蕴龙, 李克强. 基于模型的车辆队列专用短程通信系统关键性能指标描述方法*[J]. 汽车工程, 2020, 42(11): 1449-1457. |
|