汽车工程 ›› 2023, Vol. 45 ›› Issue (4): 588-597.doi: 10.19562/j.chinasae.qcgc.2023.04.007
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
高翔1,陈龙1( ),王歆叶1,熊晓夏2,李祎承1,陈月霞2
),王歆叶1,熊晓夏2,李祎承1,陈月霞2
Xiang Gao1,Long Chen1(),Xinye Wang1,Xiaoxia Xiong2,Yicheng Li1,Yuexia Chen2
摘要:
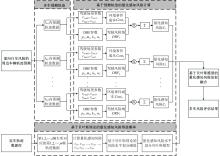
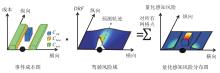
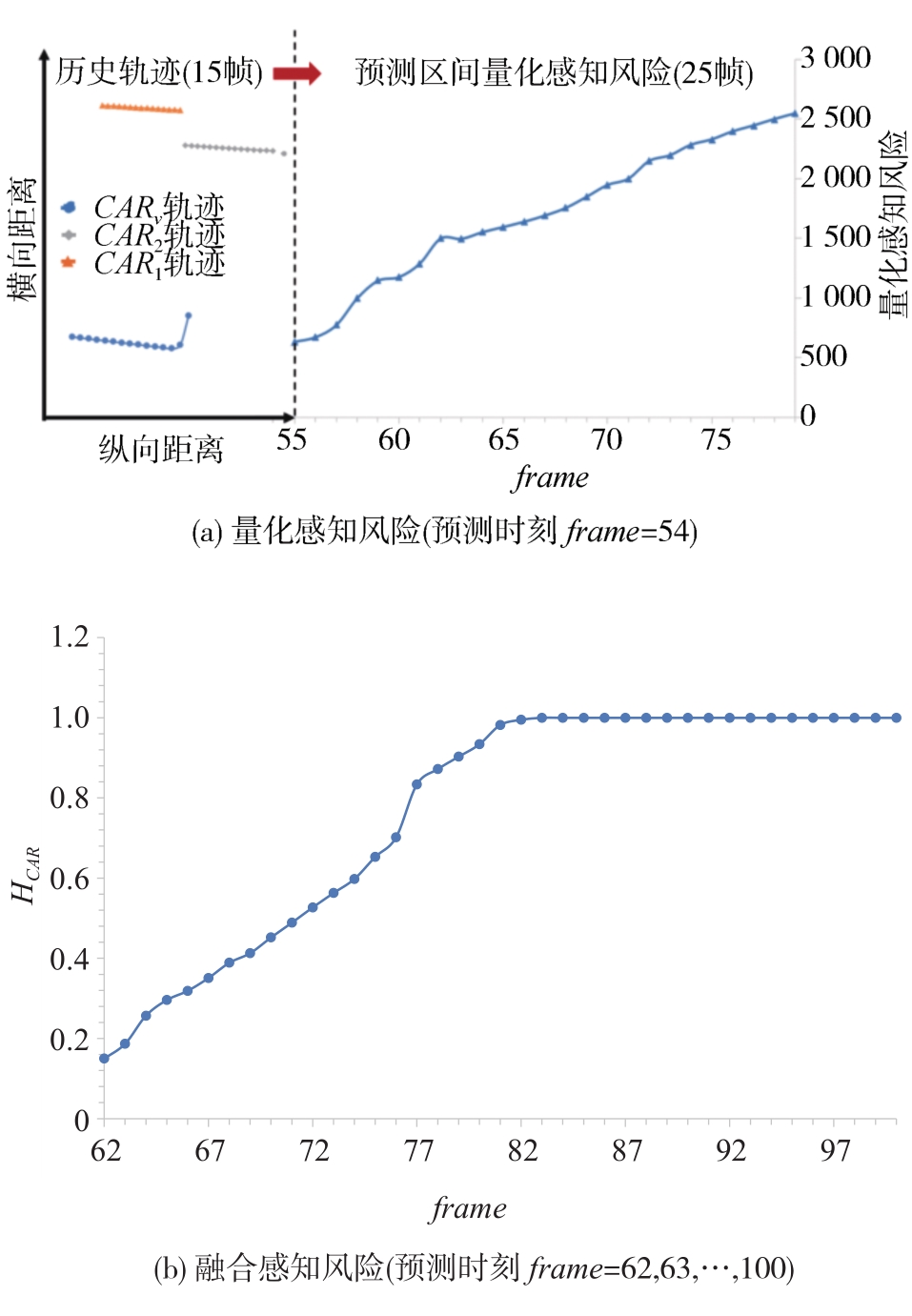
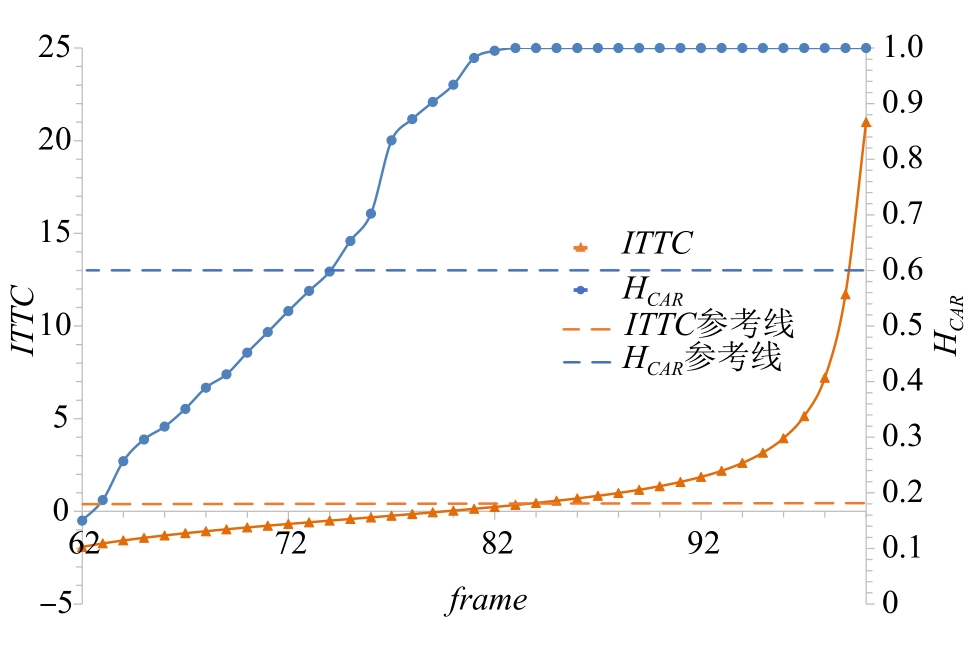
提出了基于预测轨迹的行车风险评估方法,首先建立了沿预测轨迹两侧具有渐变高斯截面特征的驾驶风险域DRF以表征驾驶员行为的不确定性,然后考虑车辆与周围静态、动态障碍物处于特定状态的风险后果建立环境事件成本,得到适应复杂行车场景不确定性的量化感知风险,并基于贝叶斯理论融合预测区间内的量化感知风险时间序列,实现了对于未来行车潜在碰撞风险的预测。实车轨迹和仿真实验结果表明,相比于经典TTC指标方法,基于融合未来一段时间内自车与周边环境交互信息的DRF的风险评估方法可以更快、更准确地辨识复杂交通场景的行车风险变化,为研究周边多车复杂场景下车辆碰撞风险问题提供了参考。