汽车工程 ›› 2025, Vol. 47 ›› Issue (9): 1686-1699.doi: 10.19562/j.chinasae.qcgc.2025.09.005
• • 上一篇
夏光1,3( ),吴士标1,张洋2,魏恒1,刘贤阳1
),吴士标1,张洋2,魏恒1,刘贤阳1
Guang Xia1,3(),Shibiao Wu1,Yang Zhang2,Heng Wei1,Xianyang Liu1
摘要:
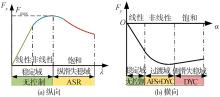
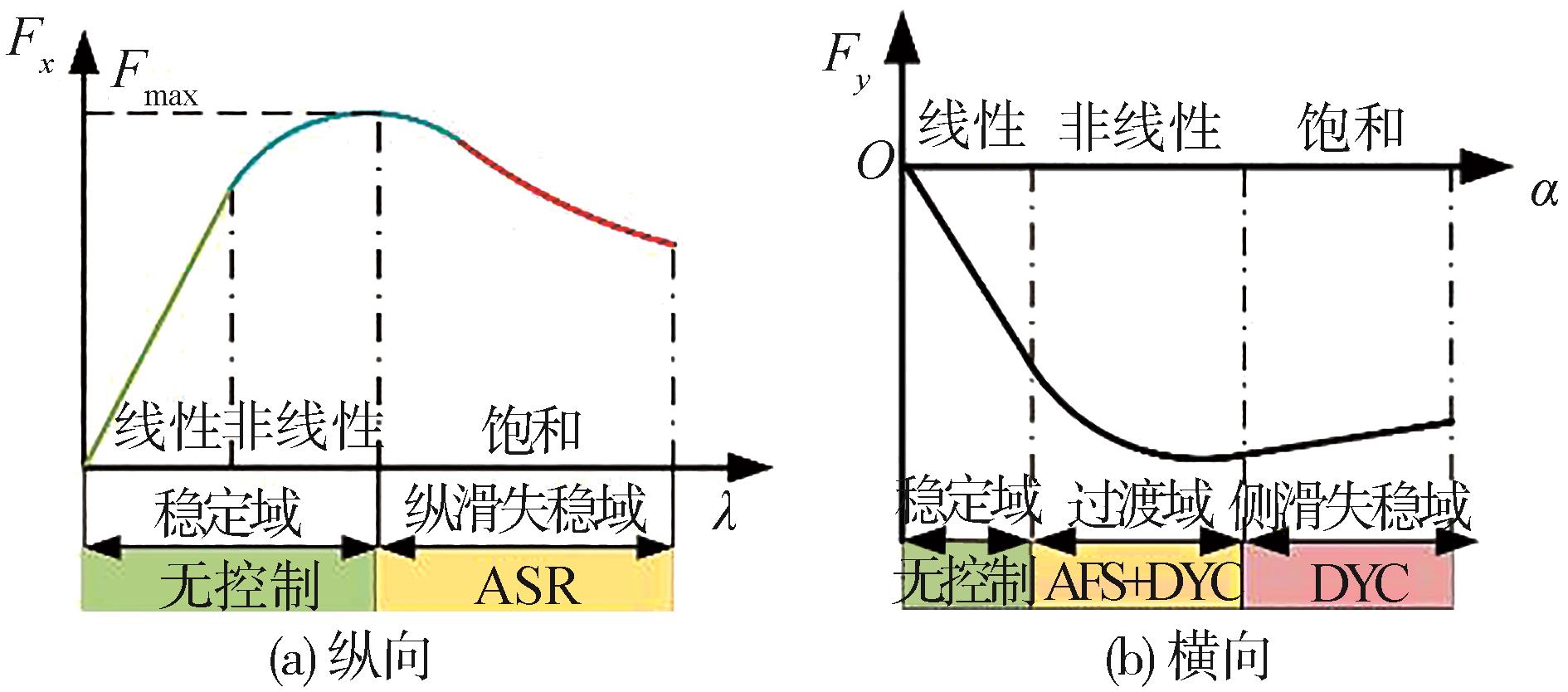
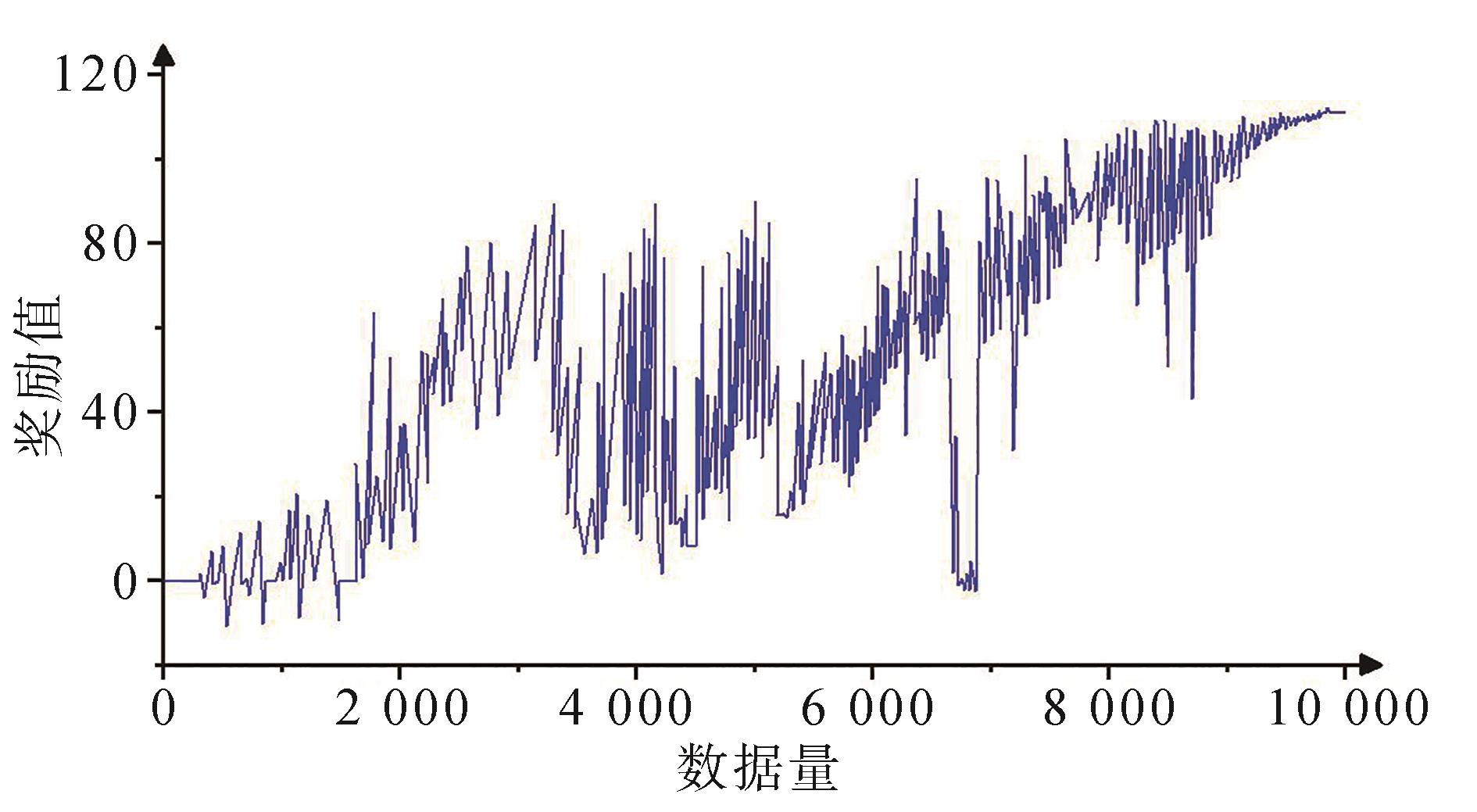
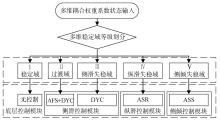
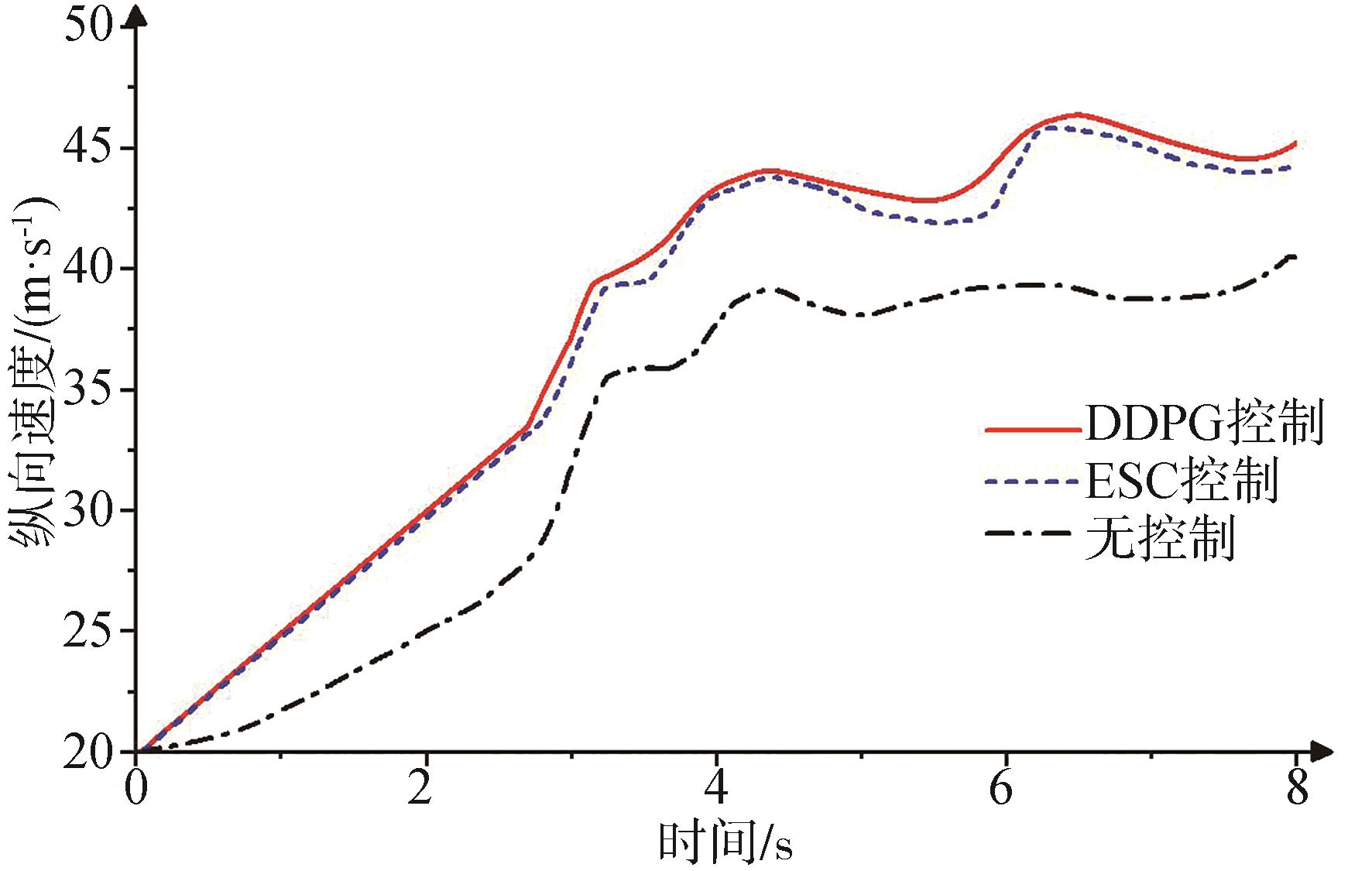
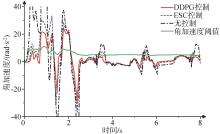
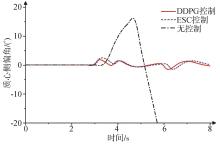
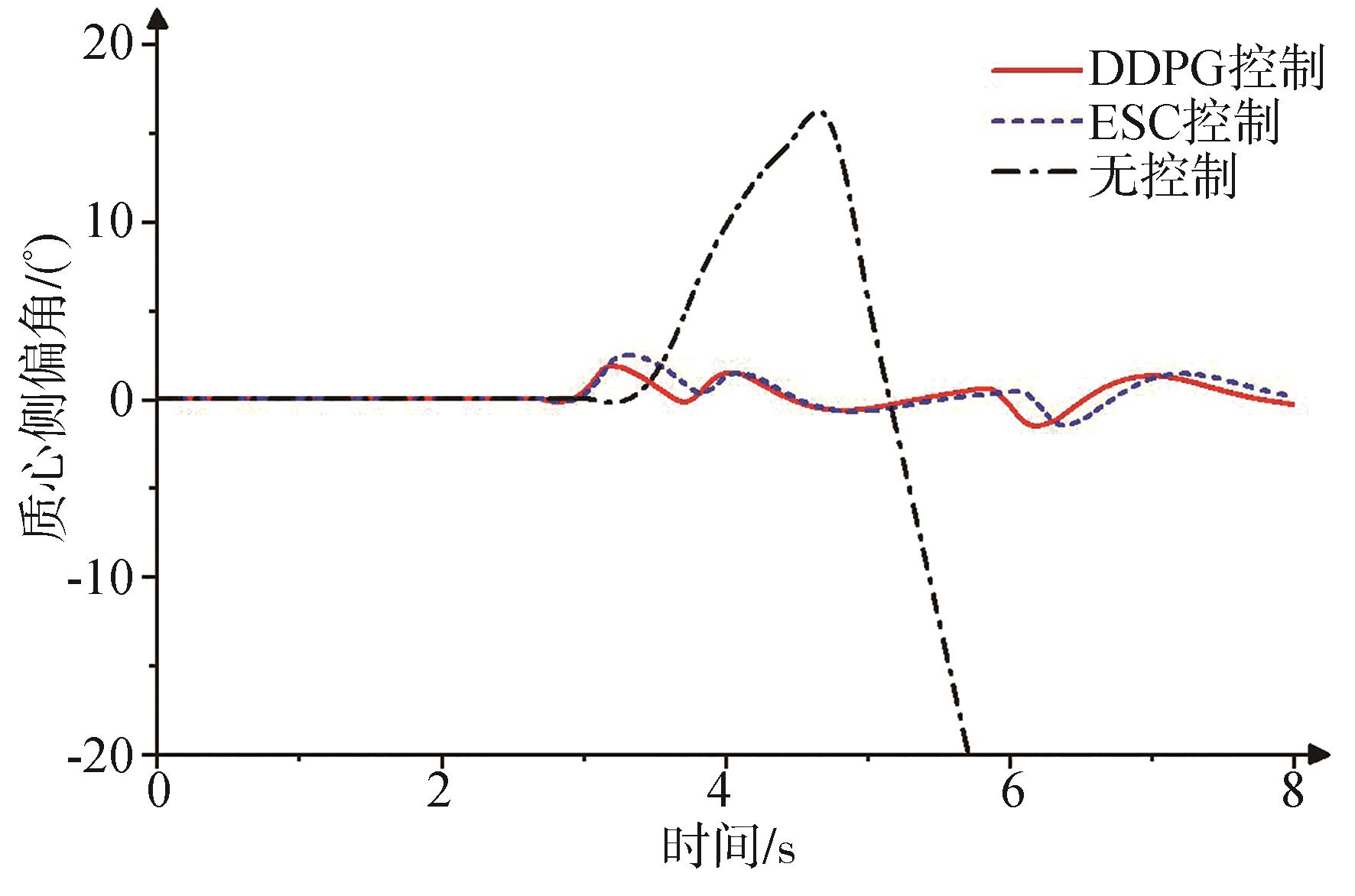
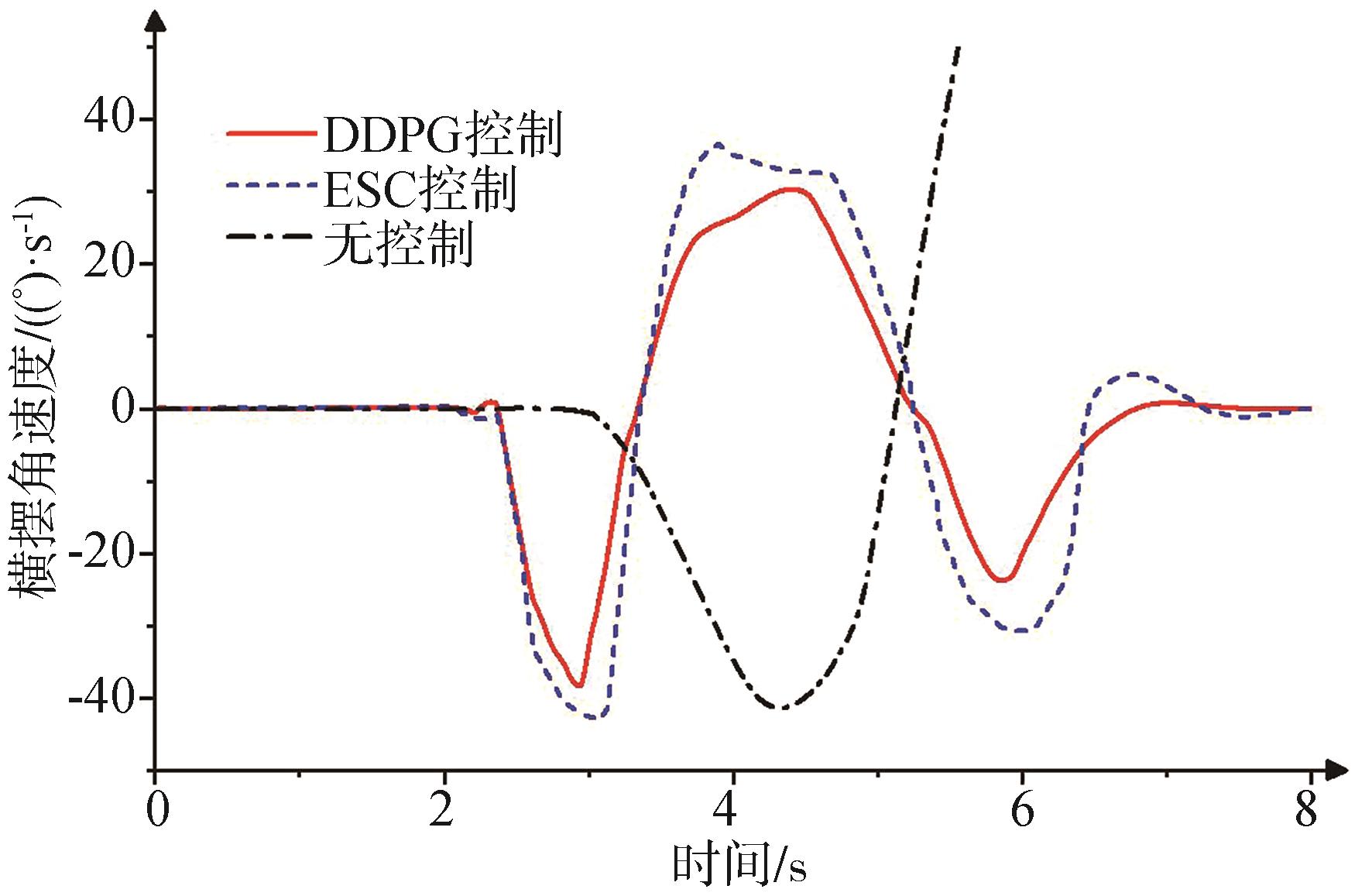
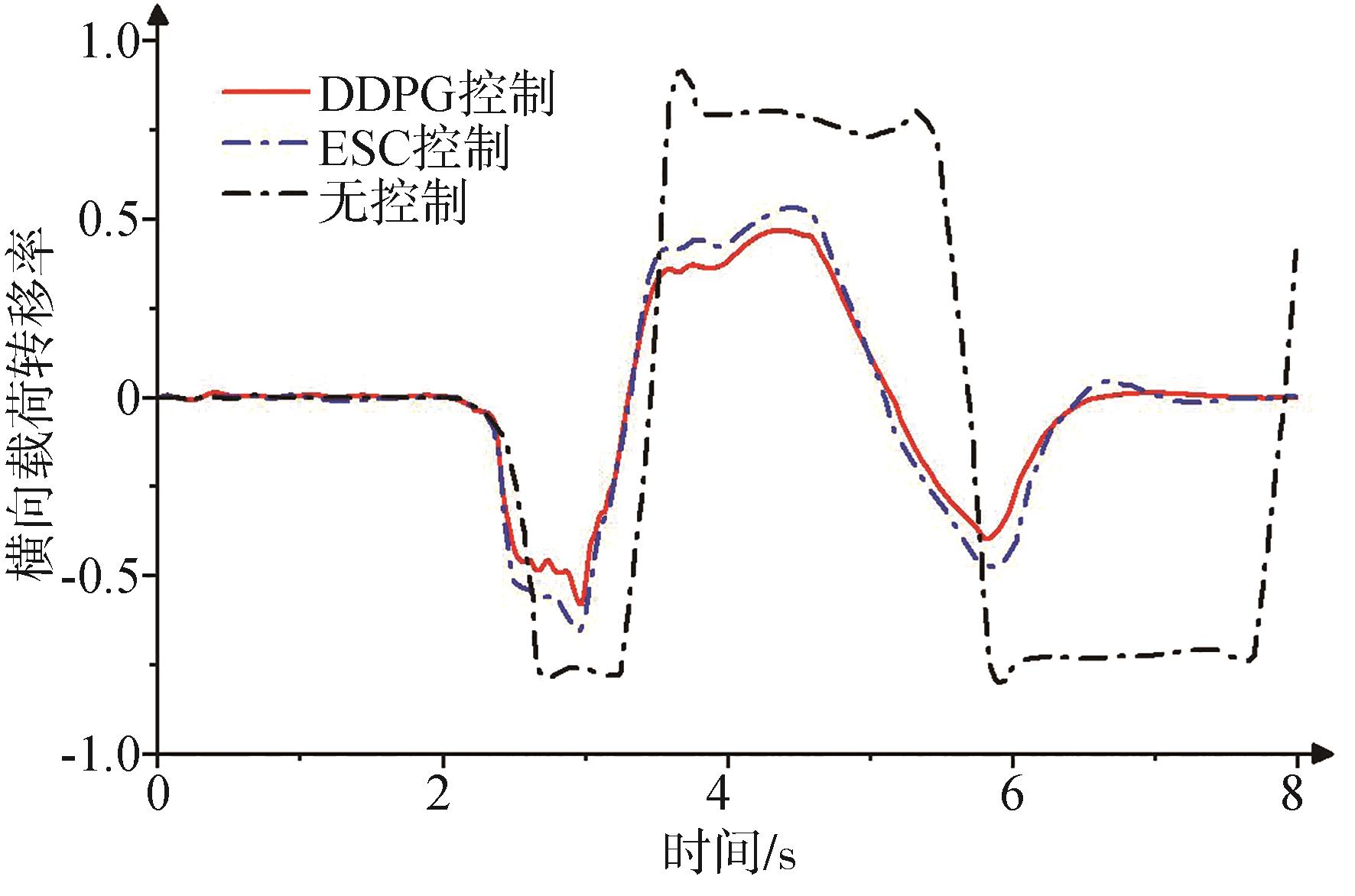
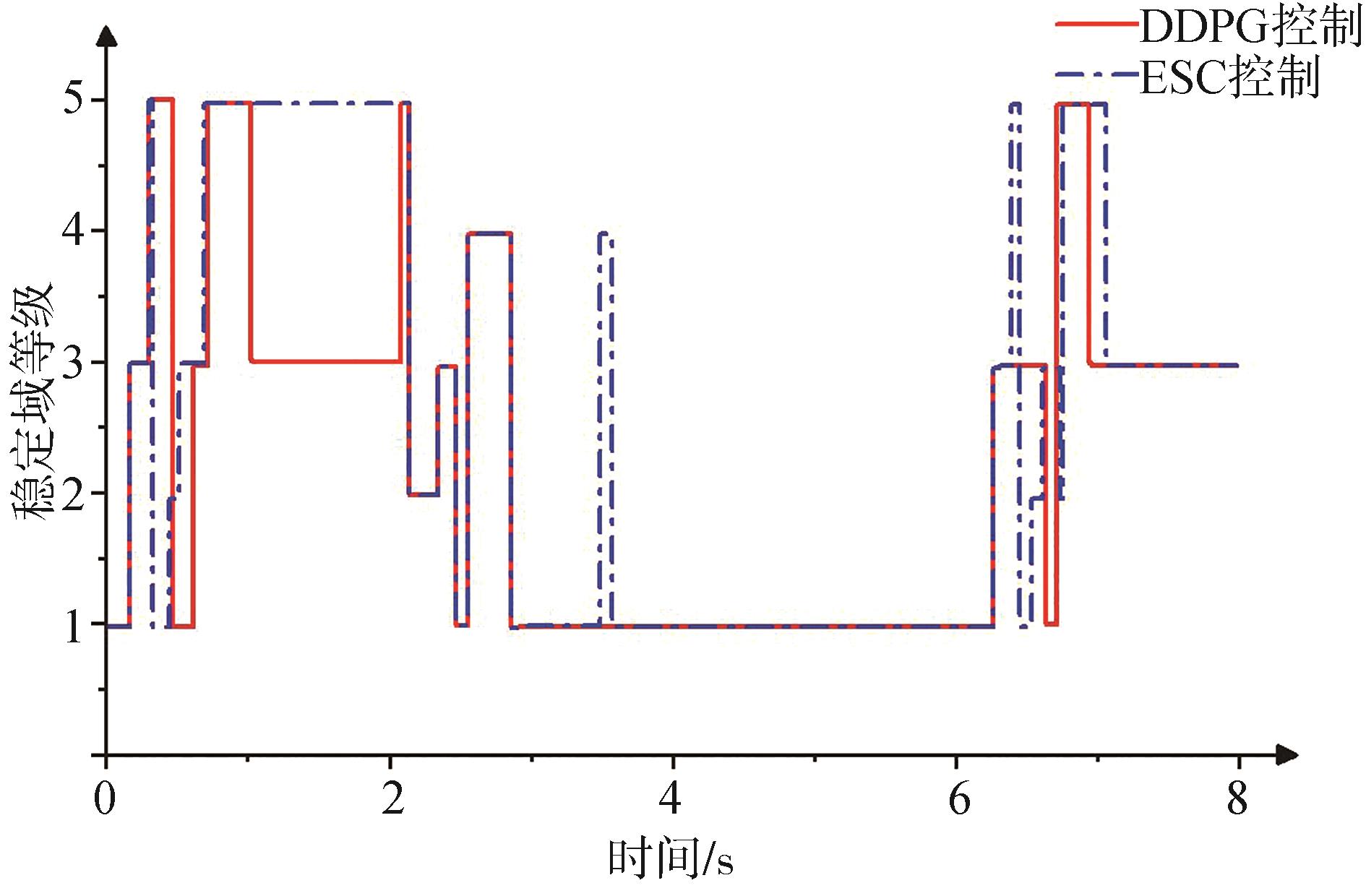
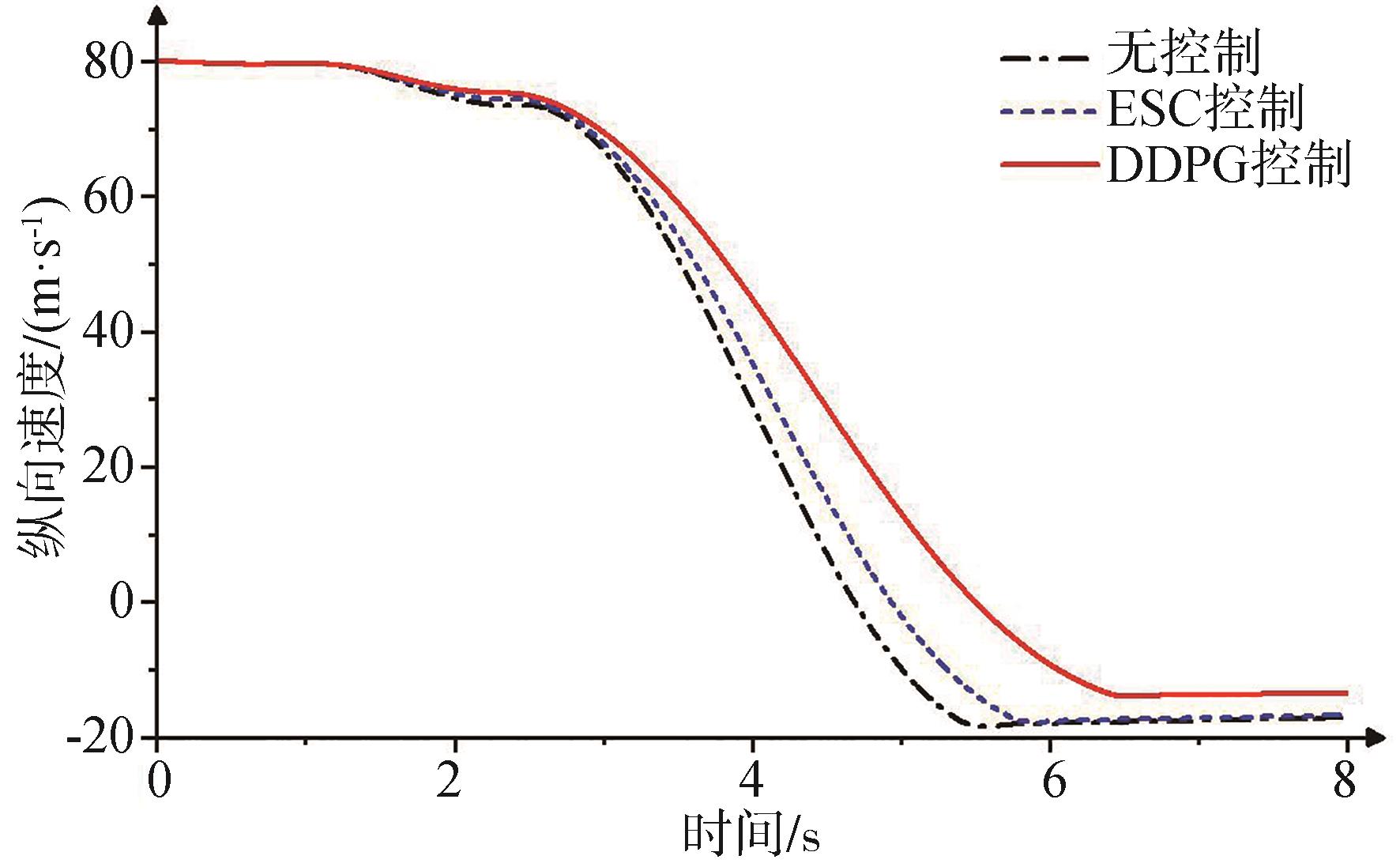
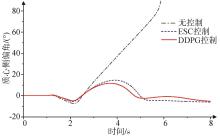
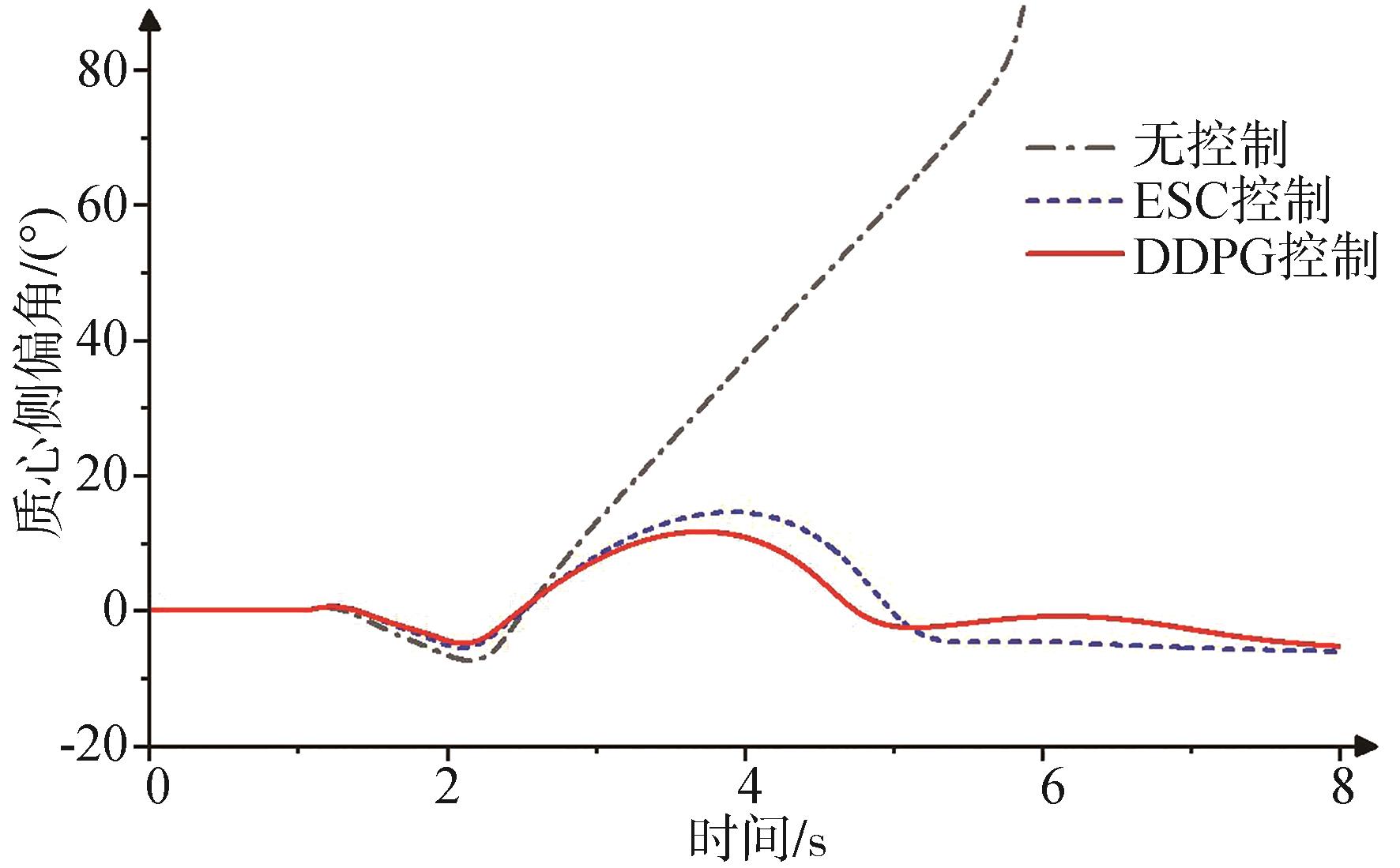
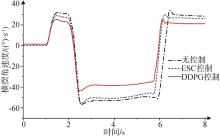
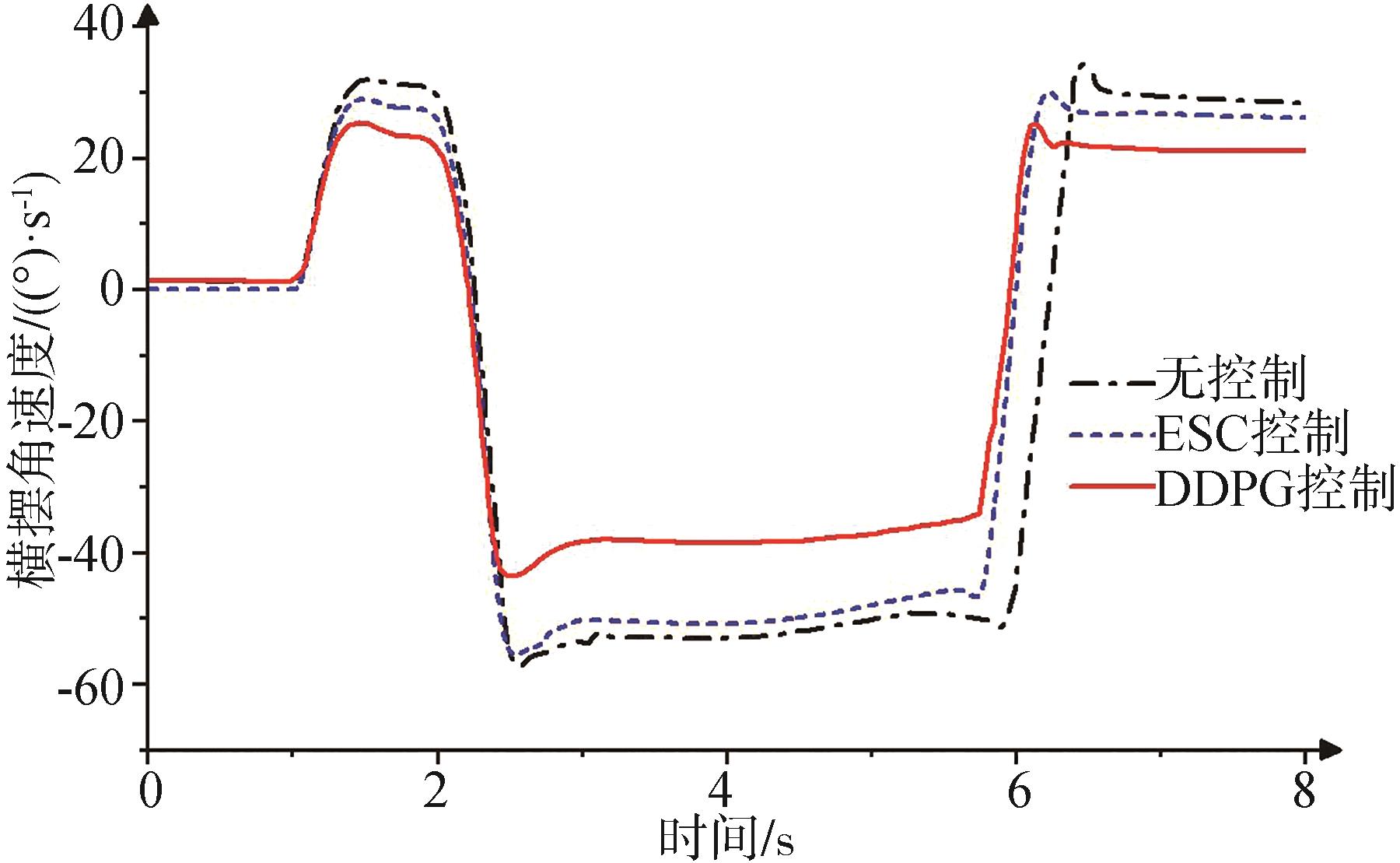
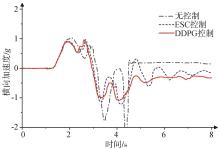
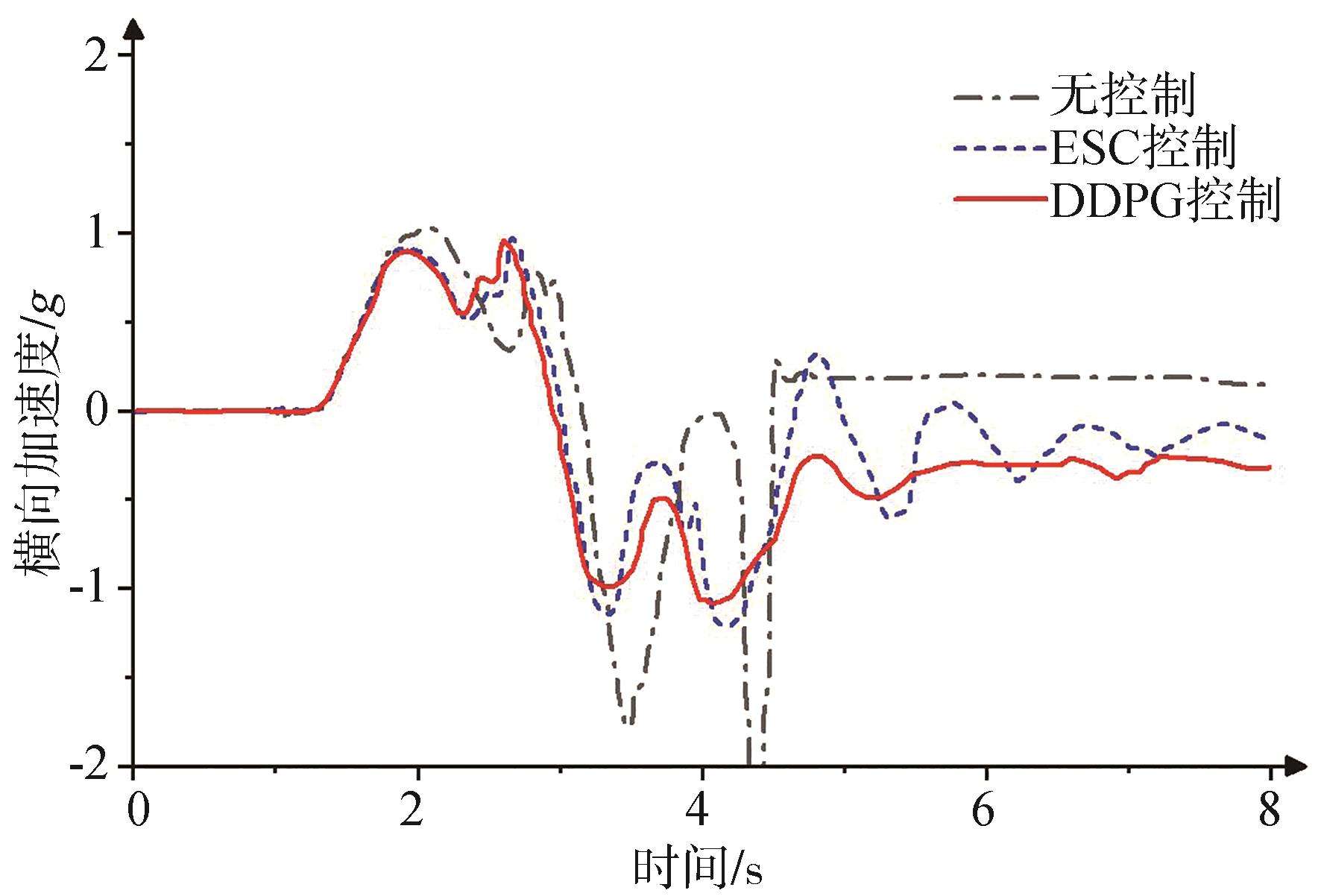
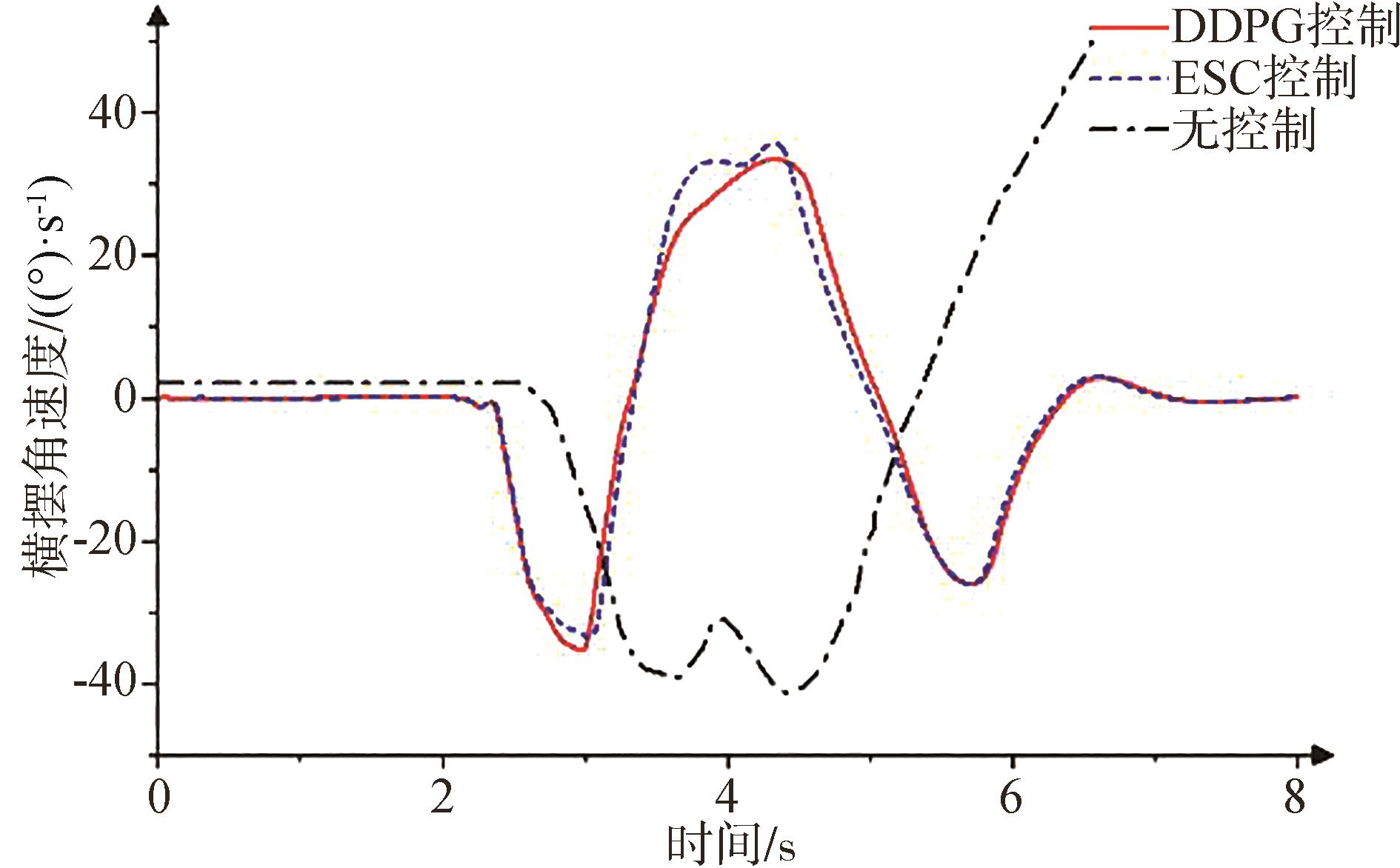
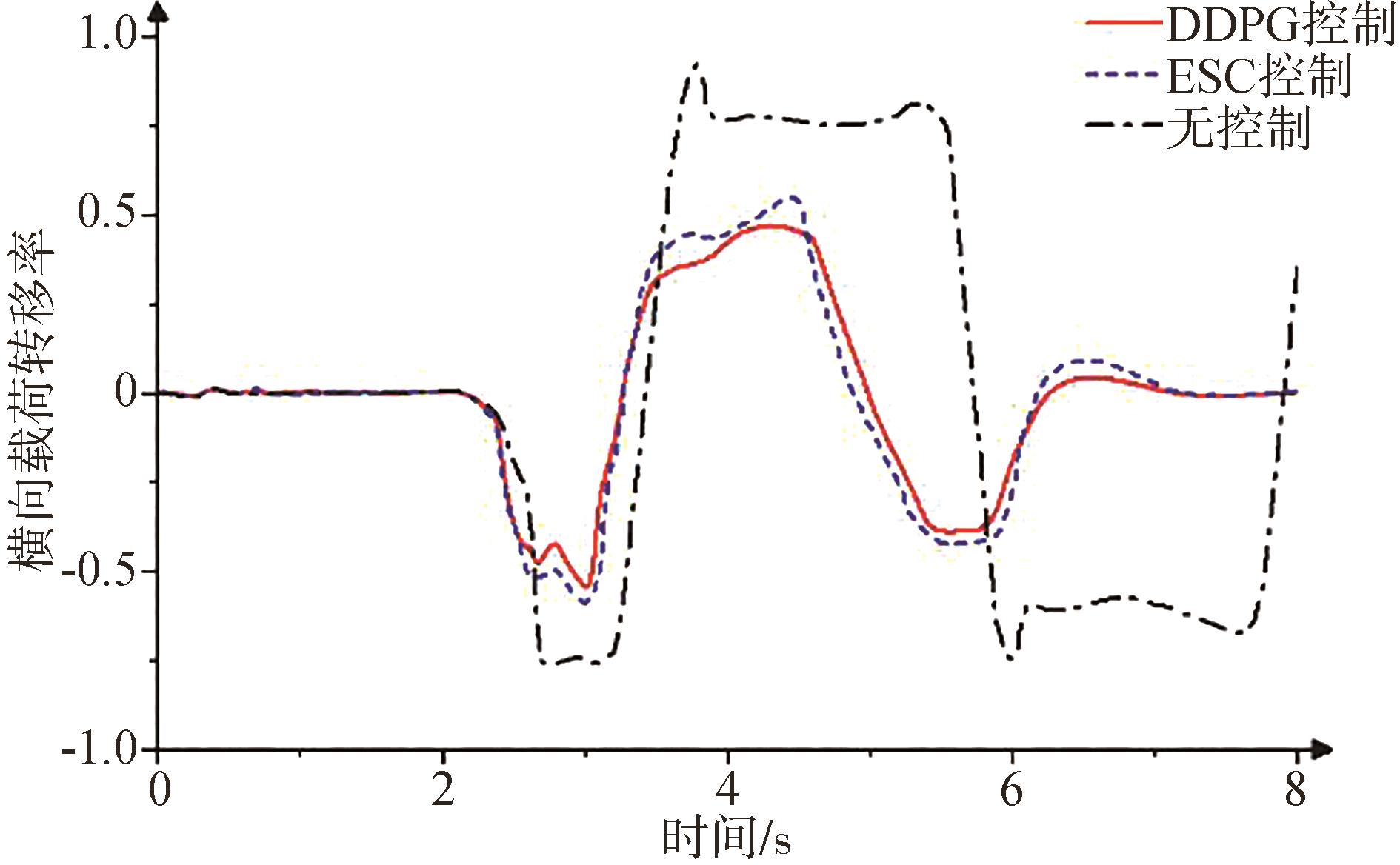
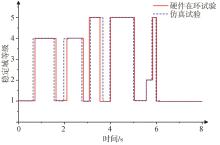
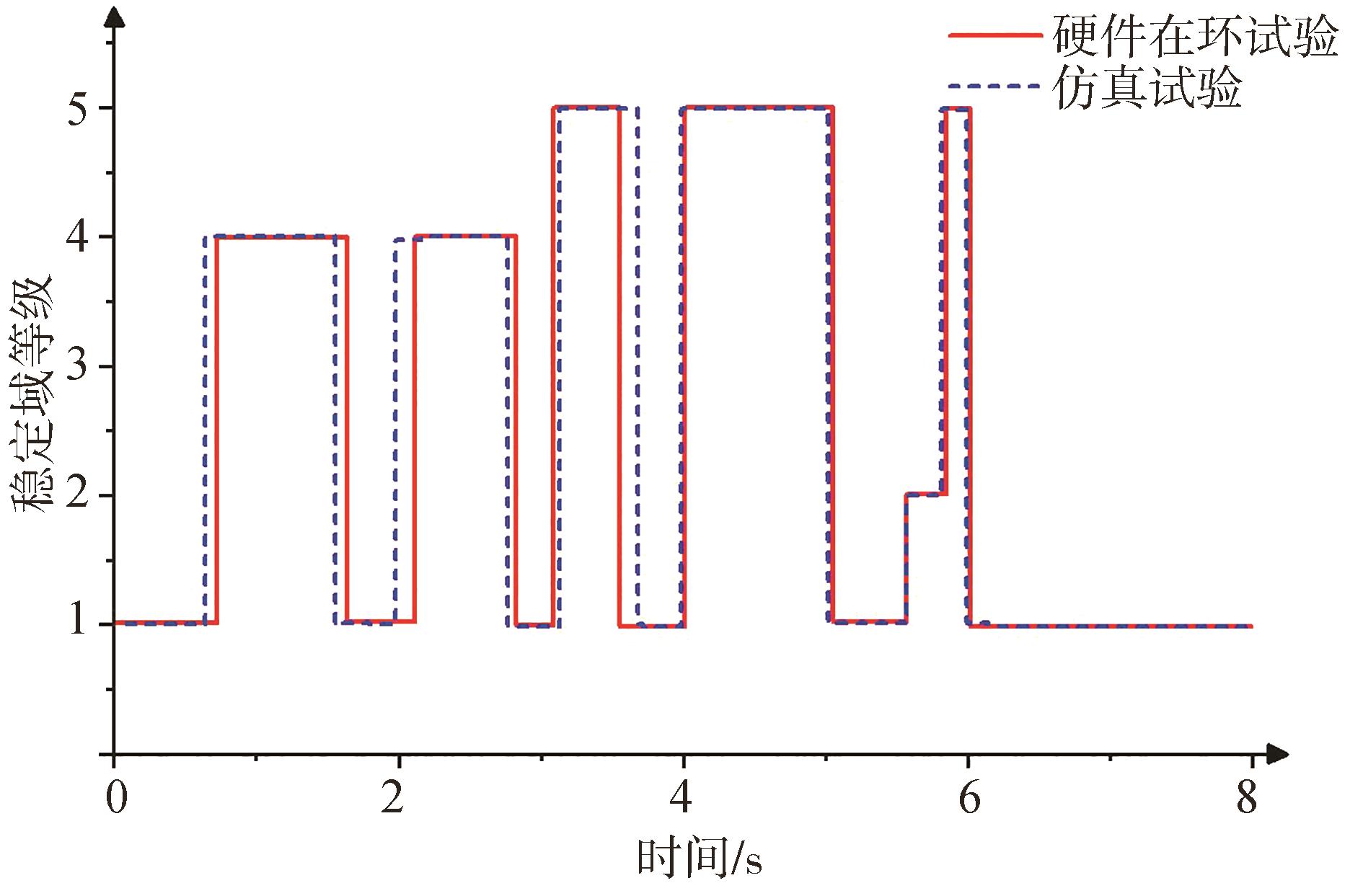
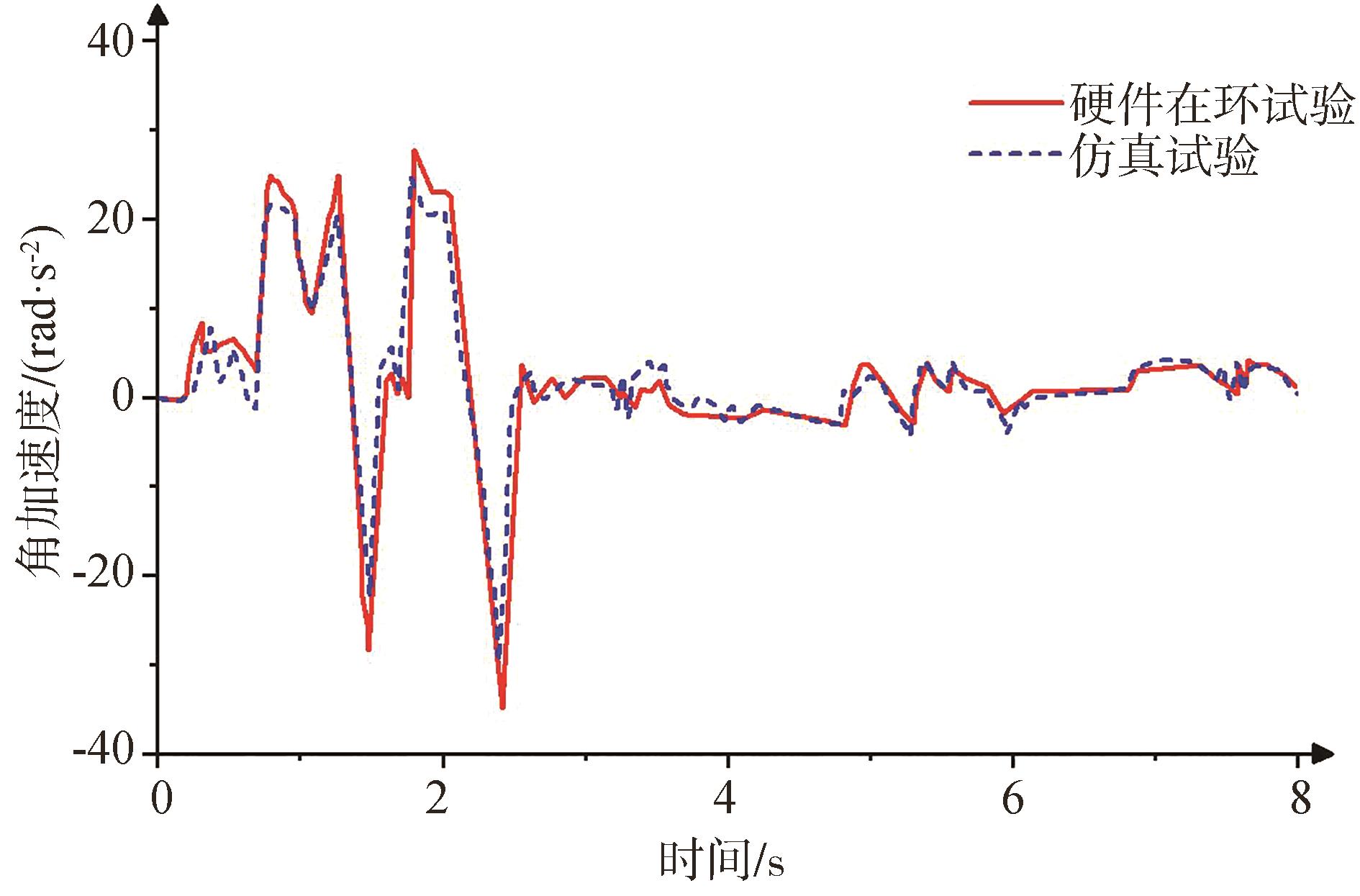
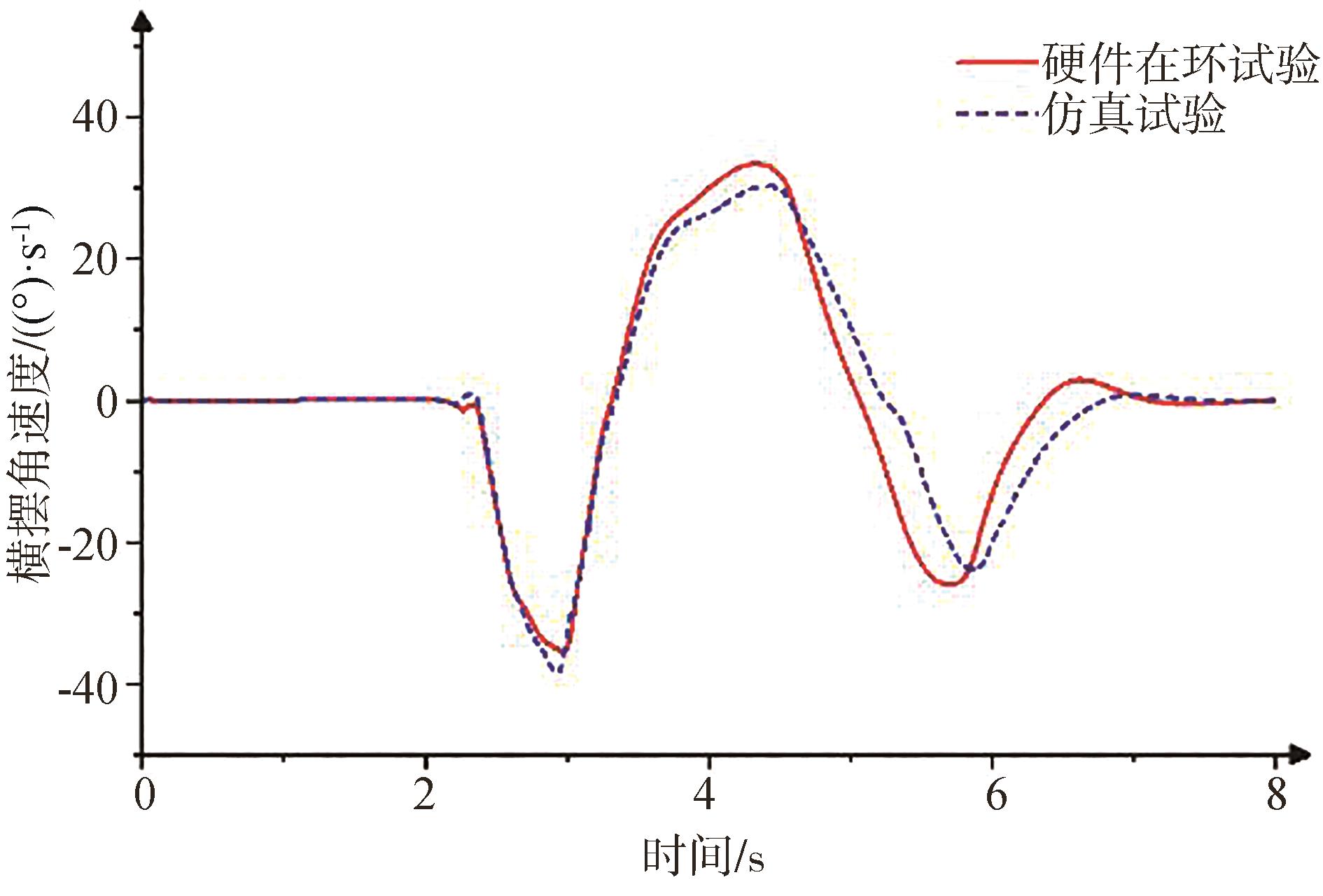
越野车辆在极限工况下易发生整车侧滑、纵滑和侧倾的多维失稳,且难以用具体的数学模型表征整车稳定性状态,因此本文提出了极限工况下越野车辆多维耦合稳定性深度强化学习协同控制策略。首先建立不同维度稳定性评价指标,同时构建多维耦合稳定域,根据轮胎纵横垂向力耦合关系进行稳定域划分,并通过离线轮胎模型训练确定各稳定域的边界参数;其次通过DDPG(deep deterministic policy gradient)深度强化学习算法构建越野车辆与环境交互下的控制策略,输出各维度最优权重系数表征越野车辆稳定性状态;再基于汽车底盘解耦的协同控制策略设计纵滑、侧滑和侧倾控制器进行稳定性控制;最后,通过CarSim与Simulink联合仿真验证和硬件在环平台验证,结果表明基于DDPG算法下多维耦合稳定性控制策略显著提升整车综合稳定性。