Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (2): 215-224.doi: 10.19562/j.chinasae.qcgc.2022.02.008
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Jingwei Zhang1,3,Tiejun Liu1,2,3,Rengang Li1,3,Dan Liu1,3( ),Jinglin Zhan1,3,Hongwei Kan1,2,3
),Jinglin Zhan1,3,Hongwei Kan1,2,3
Received:2021-10-27
Revised:2021-12-08
Online:2022-02-25
Published:2022-02-24
Contact:
Dan Liu
E-mail:bj_liudan@163.com
Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles[J].Automotive Engineering, 2022, 44(2): 215-224.

"
"

"
"


"
"

"

"
"
| 实验组 | LD发光状态[6:0] (1-点亮,0-熄灭) | 图像传感器曝光延迟tk/ms | 示波器测试I2C报文延迟/ms |
|---|---|---|---|
| 1 | 0001010 | 2.25 | 2.30 |
| 2 | 0001010 | 2.25 | 2.48 |
| 3 | 0001010 | 2.25 | 2.38 |
| 4 | 0001011 | 2.50 | 2.55 |
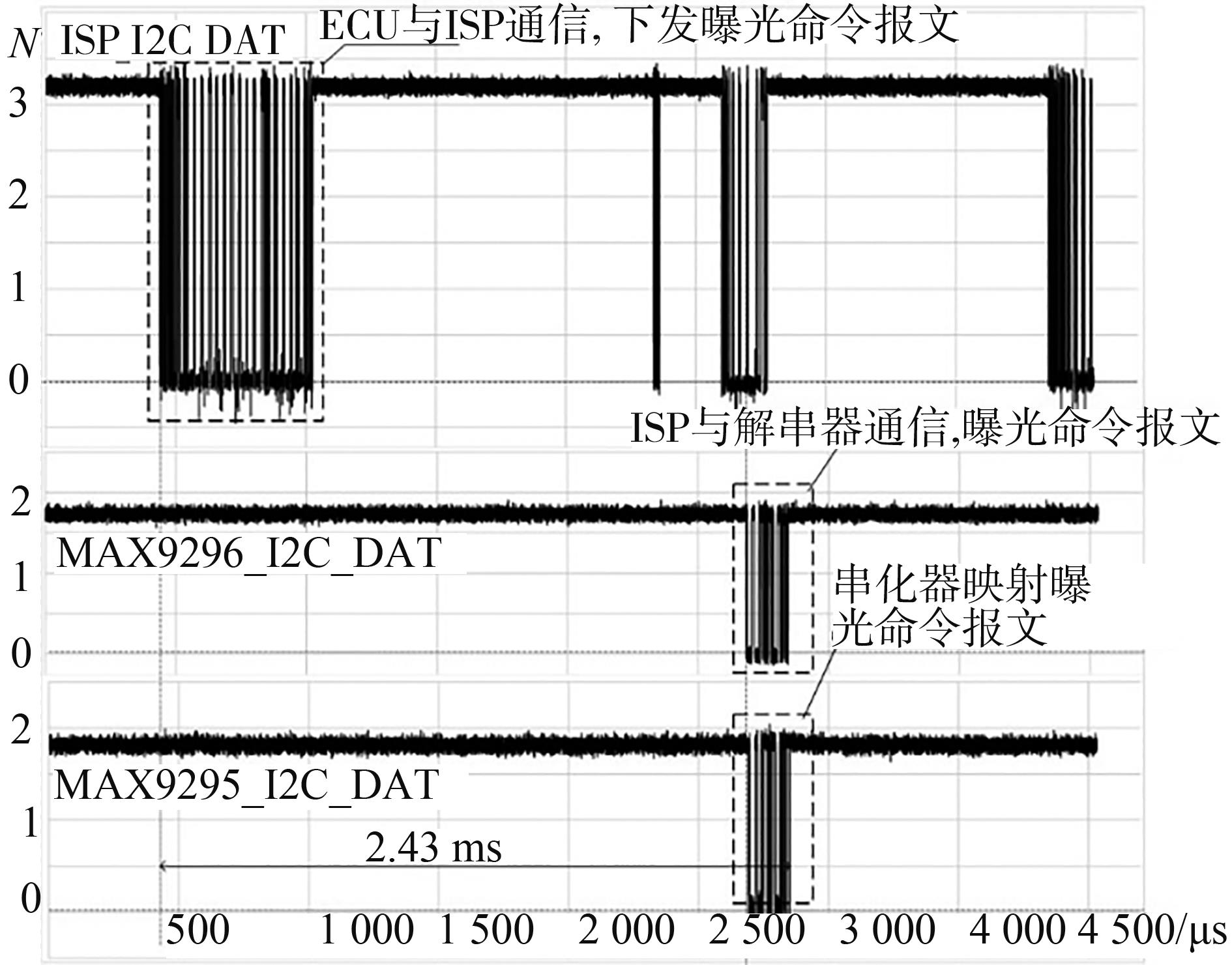
| 5 | 0001010 | 2.25 | 2.43 |

"

"
"

"
"

"
| 名称 | 数值 |
|---|---|
| 轴系 | 滚转轴(内圈) |
| 转角范围 | 连续 |
| 角速率范围/((°)·s-1) | ±0.001~±1 200 |
| 角加速度(Max)/((°)·s-1) | 1 800 |
| 速率精度平稳性/((°)·s-1) | ≤5x10-5(360°平均)ω≥10 |
| 速率分辨率/((°)·s-1) | 0.000 1 |
"
| θ | t/s | ((°)·s-1) | ωIz/((°)·s-1) | td/ms |
|---|---|---|---|---|
| 0 | 0 | |||
| 2π | 0.106 021 | 3.017 6 | 3.303 5 | 21 |
| 4π | 0.209 435 | 0.967 7 | 1.432 5 | 23 |
| 6π | 0.309 021 | -1.390 9 | -0.955 0 | 19 |
| 8π | 0.405 452 | -3.180 6 | -2.870 3 | 21 |
| 10π | 0.499 976 | -3.838 2 | -3.814 0 | 18 |
| 12π | 0.594 545 | -3.180 6 | -3.446 3 | 22 |
| 14π | 0.690 933 | -1.392 0 | -1.786 8 | 18 |
| 16π | 0.790 578 | 0.968 0 | 0.447 0 | 22 |
| 18π | 0.893 955 | 3.017 2 | 2.626 6 | 24 |
| 20π | 1.000 022 | 3.838 1 | 3.808 0 | 20 |
"


"
| 1 | WONG U , GARNEY B , WHITTAKER W , et al. Camera and LIDAR fusion for mapping of actively illuminated subterranean voids[C]. Field and Service Robotics, Results of the 7th International Conference, FSR 2009. |
| 2 | WISTH D , CAMURRI M , DAS S , et al. Unified multi-modal landmark tracking for tightly coupled lidar-visual-inertial odometry[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1004-1011. |
| 3 | GENEVA P , ECKENHOFF K , YANG Y, et al. LIPS: LiDAR-inertial 3D plane SLAM[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). IEEE, 2018. |
| 4 | 杨明亮,寇胜杰,芦勇,等. 基于多传感器融合的换道预警模型研究[J]. 汽车工程, 2019, 41(10): 1197-1203. |
| YANG Mingliang, KOU Shengjie, LU Yong, et al. Research on lane change warning model based on multi-sensor fusion[J]. Automotive Engineering, 2019, 41(10): 1197-1203. | |
| 5 | LEE K , EIDSON J . IEEE 1588 standard for a precision clock synchronization protocol for networked measurement and control systems[C]. 2nd ISA/IEEE Sensors for Industry Conference. IEEE, 2002. |
| 6 | LUPTON T , SUKKARIEH S . Visual-Inertial-Aided navigation for high-dynamic motion in built environments without initial conditions[J]. IEEE Press, 2012, 28(1):61-76. |
| 7 | FORSTER C, CARLONE L, DELLAERT F, et al. IMU preintegration on manifold for efficient visualinertial maximum-a-posteriori estimation[C]. Proceedings of the 2015 Robotics: Science and Systems, Rome, Italy, 2015. |
| 8 | OPROMOLLA R, FASANO G, RUFINO G, et al. LIDAR-inertial integration for UAV localization and mapping in complex environments[C]. International Conference on Unmanned Aircraft Systems. IEEE, 2016. |
| 9 | SOMMER H , KHANNA R , GILITSCHENSKI I , et al. A low-cost system for high-rate, high-accuracy temporal calibration for LIDARs and cameras[C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017. |
| 10 | ENGLISH A , ROSS P , BALL D , et al. TriggerSync: a time synchronisation tool[J]. IEEE, 2015:6220-6226. |
| 11 | HALL D S. High definition lidar system: US7969558B2[P]. 2011-06-28. |
| 12 | HALL D S, SHETTIGARA R, SLATTENGREN N, et al. Lidar signal acquisition: US10739444B2[P]. 2020-08-11. |
| 13 | 付凤杰,李辰懋,吴丽,等. 视觉传感器和惯性传感器的时间标定方法[J]. 光学学报,2021,41(24):2415002. |
| FU F J, LI C M, WU L, et al. Temporal calibration method for visual sensor and inertial sensor[J]. Acta Optica Sinica, 2021,41(24):2415002. | |
| 14 | FURGALE P , REHDER J , SIEGWART R . Unified temporal and spatial calibration for multi-sensor systems[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems. IEEE, 2013. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [3] | Zhenfeng Pu, Liang Tang, Wenbin Shangguan, Weiwei Wang, Kaihong Jiang. Research on the Estimation of Vehicle Speed Under Low-Speed Conditions Based on Multi-sensor Information [J]. Automotive Engineering, 2023, 45(7): 1235-1243. |
| [4] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [5] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [6] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [7] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [8] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [9] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [10] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |
| [11] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [12] | Huei Peng. Autonomous Vehicles—the Remaining Challenges [J]. Automotive Engineering, 2021, 43(4): 451-458. |
| [13] | Xiangyang Xu,Wenhao Hu,Honglei Dong,Yan Wang,Lingyun Xiao,Penghui Li. Review of Key Technologies for Autonomous Vehicle Test Scenario Construction [J]. Automotive Engineering, 2021, 43(4): 610-619. |
| [14] | Rong Wang,Yafu Sun,Juan Song. Evaluation Method and Test Verification of Road Test Scenes for Autonomous Vehicles [J]. Automotive Engineering, 2021, 43(4): 620-628. |
| [15] | Yang Mingliang, Kou Shengjie, Lu Yong, Yu Chunlei, Jiang Kun & Yang Diange. Research on Lane Change Warning Model Based on Multi-sensor Fusion [J]. Automotive Engineering, 2019, 41(10): 1197-1203. |
|