汽车工程 ›› 2021, Vol. 43 ›› Issue (6): 851-860.doi: 10.19562/j.chinasae.qcgc.2021.06.008
来飞1,2( ),黄超群3,董红亮1,陈涛2,赵树廉4
),黄超群3,董红亮1,陈涛2,赵树廉4
Fei Lai1,2(),Chaoqun Huang3,Hongliang Dong1,Tao Chen2,Shulian Zhao4
摘要:
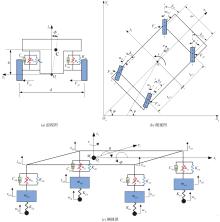
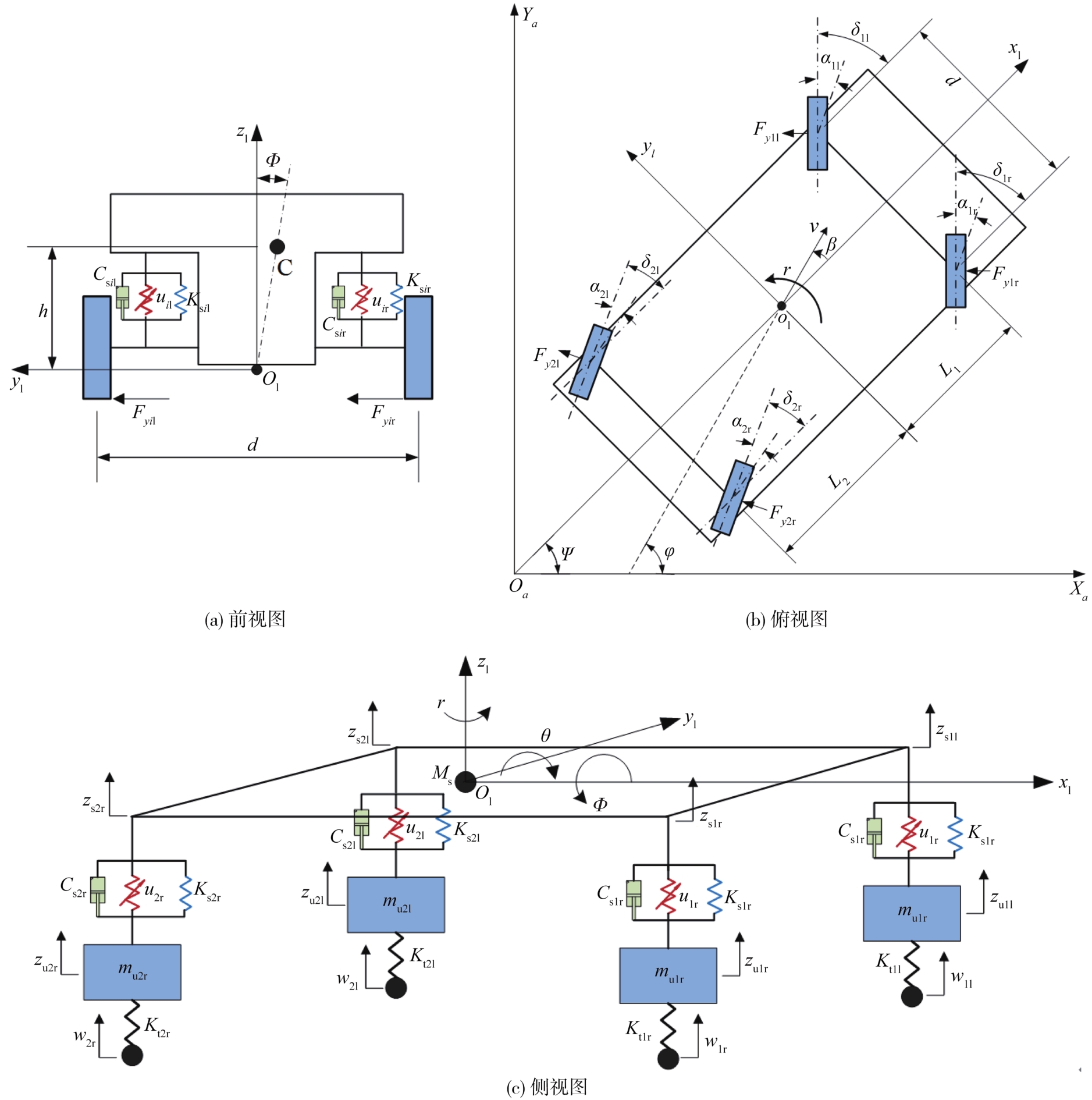
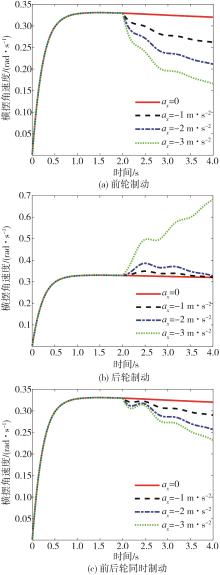
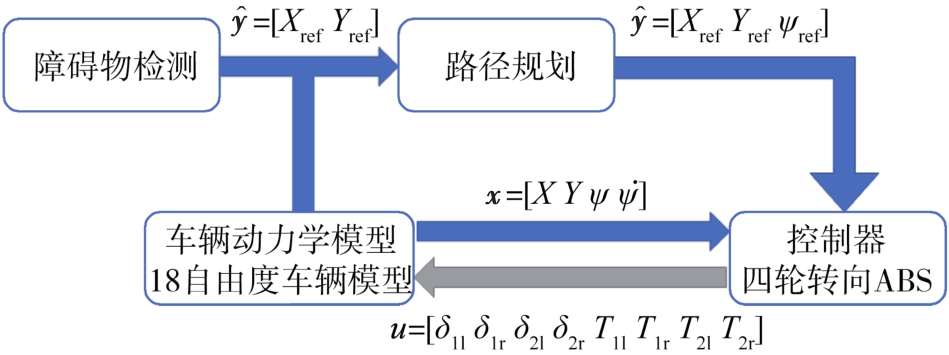
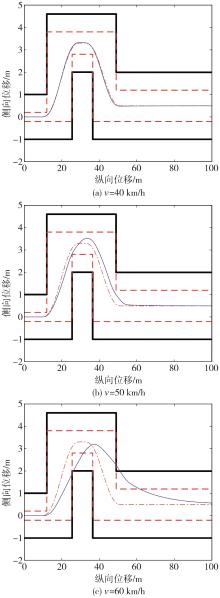
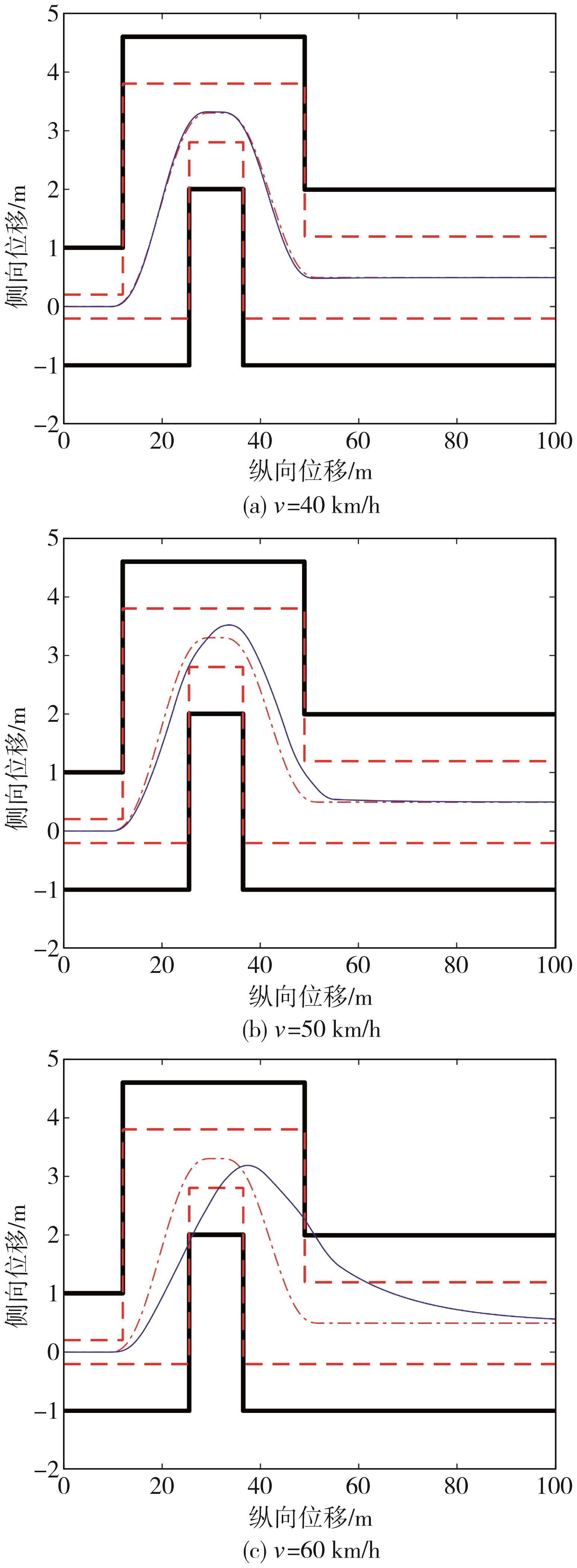
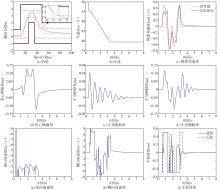
为提高智能汽车极限工况下的自动紧急避撞能力,提出了一种联合制动与转向的综合控制方法。首先,建立了包含转向、制动和悬架子系统耦合特性的18自由度统一动力学模型,并对其进行了水平路面上的转向制动仿真。接着,提出了联合制动与转向的自动紧急避撞系统总体框架,其中路径规划选用五次多项式规划算法,纵向采用滑模跟踪控制,侧向采用基于2自由度参考模型的最优四轮转向跟踪控制。最后,参考乘用车双移线极限工况测试国际标准,构建自动紧急避撞驾驶场景,对上述模型在不同车速下的自动紧急转向避撞和联合制动与转向避撞进行了对比仿真。结果表明:当车速较高时,车辆实际轨迹与理想跟踪轨迹存在一定滞后,极限工况下仅通过转向操作难以成功避撞;而联合制动与转向的避撞控制系统可进一步提高车辆极限工况下的自动紧急避撞能力,最大通过车速可由50提高至60 km/h。