汽车工程 ›› 2021, Vol. 43 ›› Issue (11): 1620-1630.doi: 10.19562/j.chinasae.qcgc.2021.11.007
江昕炜1( ),陈龙1,华一丁2,徐兴1
),陈龙1,华一丁2,徐兴1
Xinwei Jiang1(),Long Chen1,Yiding Hua2,Xing Xu1
摘要:
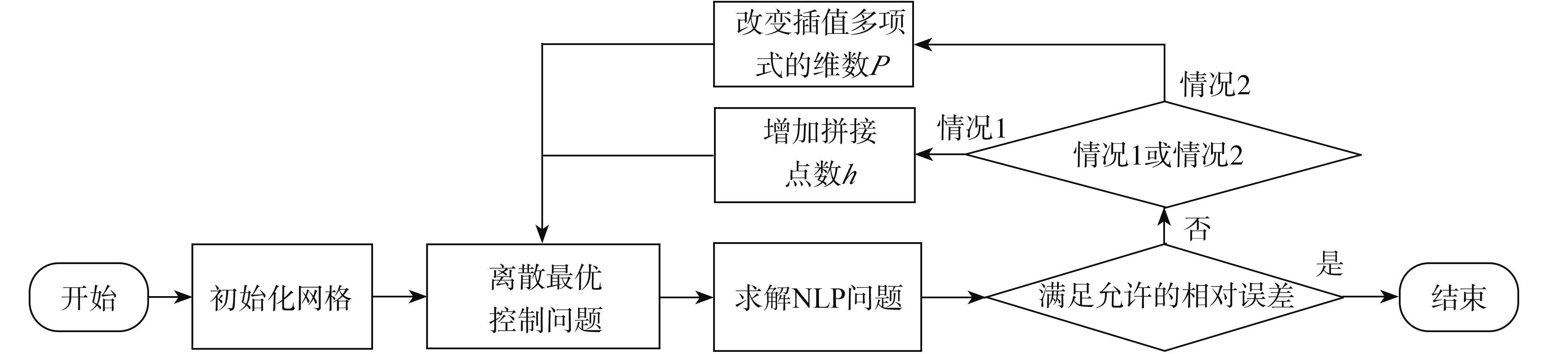
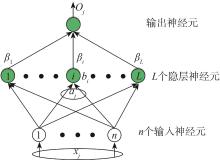
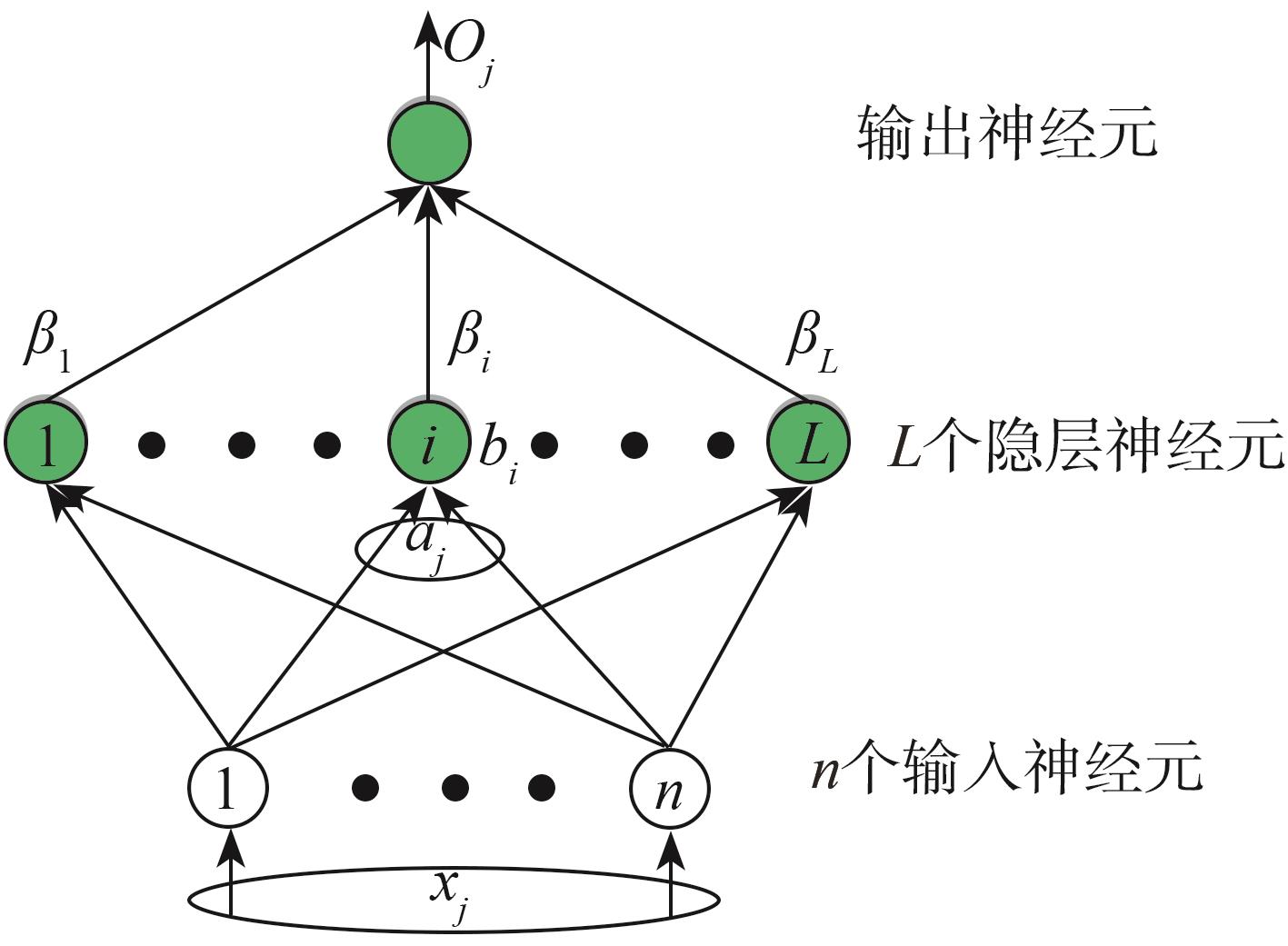
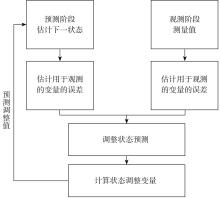
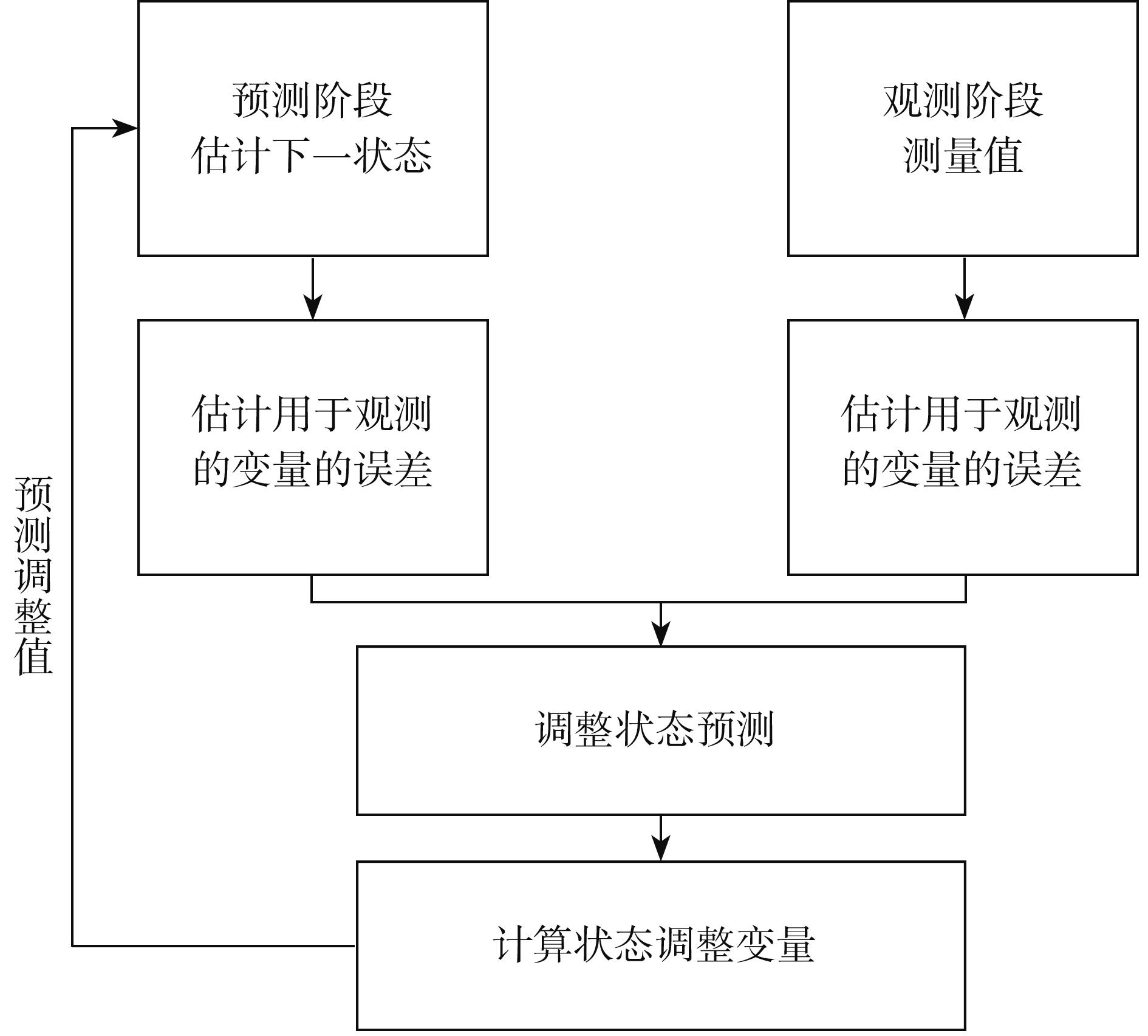
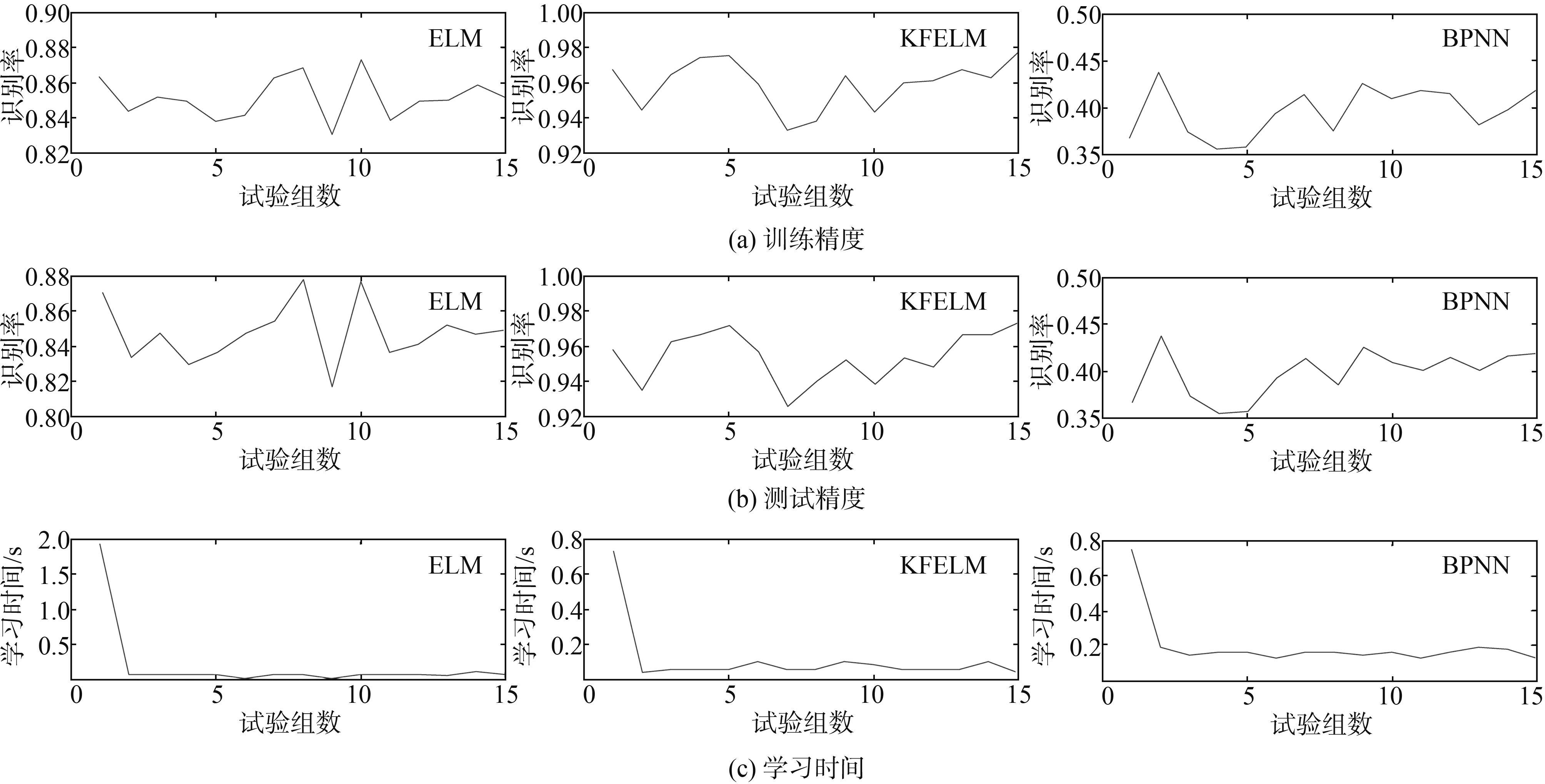
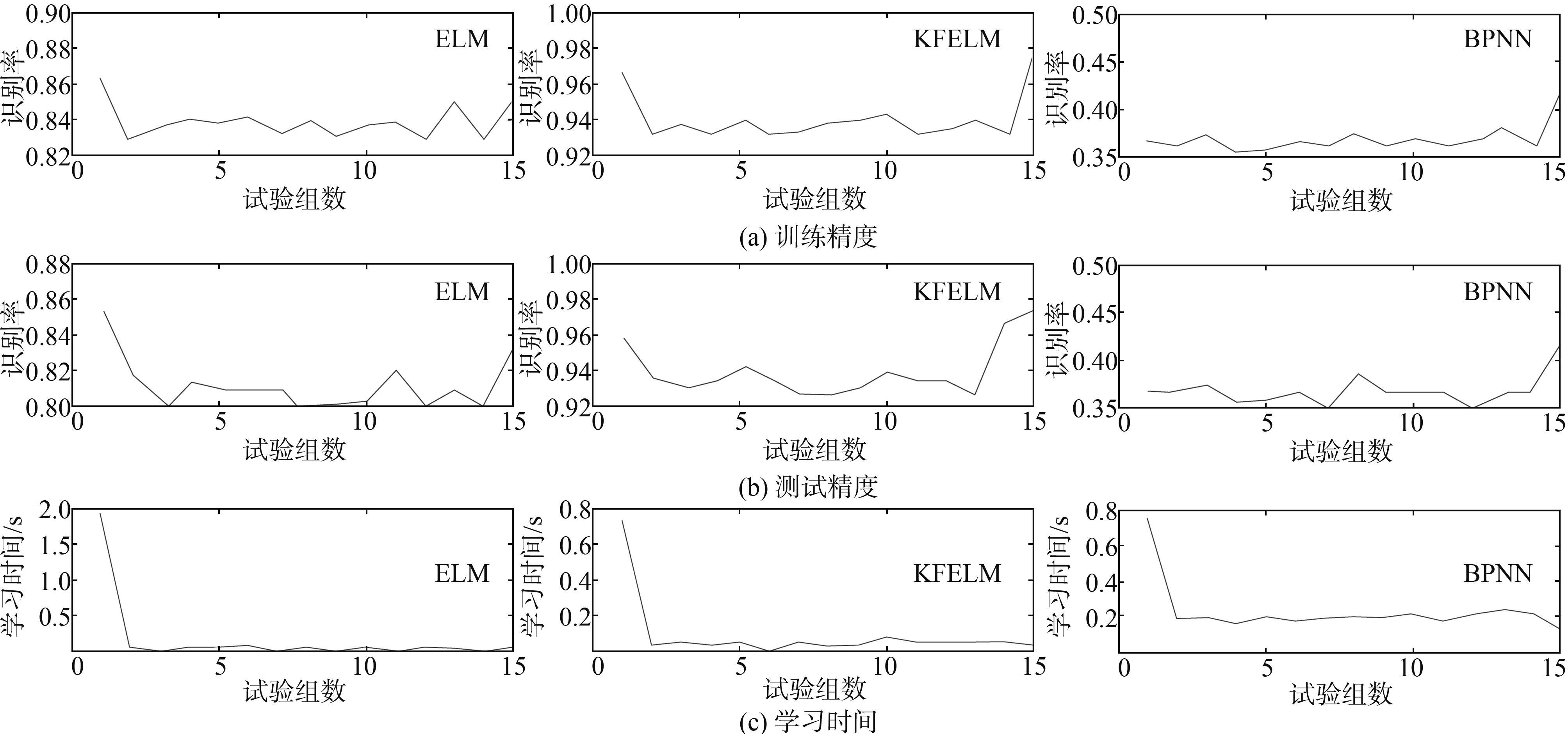
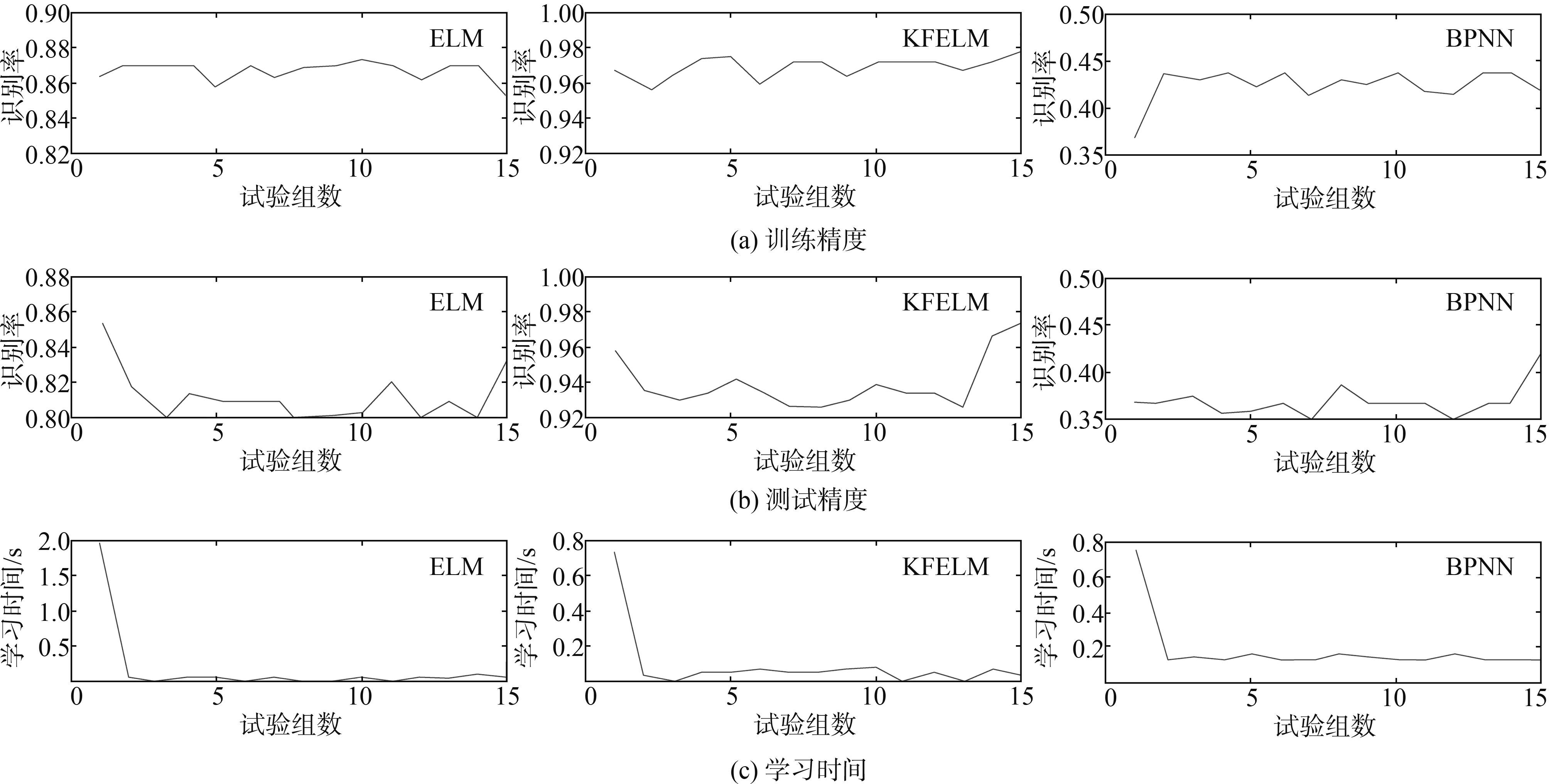
为使智能汽车在转向操控方面尽量接近人类驾驶员的转向操控水平,提出一种训练并学习熟练驾驶员行车轨迹的非线性拟合方法。基于分段多项式方法构建右转、掉头、车道保持和换道等4种典型转向工况表达模型,并结合自适应伪谱法实现分段轨迹的有效衔接。为避免传统神经网络学习算法(如BPNN)需要人为设置大量的网络训练参数,且易产生局部最优解的不足,提出了基于改进型极限学习机(ELM)的熟练驾驶员行车轨迹非线性拟合策略。引入卡尔曼滤波(KF)算法,对ELM输出权重矩阵进行滤波处理,更新阶段循环计算,实现对ELM算法的优化,提高了ELM在多重共线性的情况学习精度。分别利用KFELM、ELM和BPNN对不同工况下的熟练驾驶员行车轨迹进行非线性拟合试验。结果表明,KFELM的训练精度和测试精度明显优于ELM和BPNN,同时KFELM的学习速度稍好于ELM,且明显优于BPNN。改进型ELM的驾驶模型训练方法为自动驾驶汽车提供了决策控制的理论依据。